A Comparison of In-Band and Out-of-Band Transport
advertisement

A Comparison of In-Band and Out-of-Band Transport Options for Signaling
Malathi Veeraraghavan
ECE Department
University of Virginia
Charlottesville, VA 22904
mv5g@virginia.edu
Haobo Wang
ECE Department
Polytechnic University
Brooklyn, NY 11201
haobo_w@photon.poly.edu
within each SONET signal, and (ii) out-of-band signaling
channels, e.g., an Ethernet interface from the control (call) processor of the switch to an IP network.
Abstract: Signaling protocols for GMPLS networks have been
standarized and are now being implemented. Most switch vendors
allow for signaling messages to be carried over in-band signaling
channels as well as through out-of-band networks. In this paper,
we compare these two signaling transport options. In carrying out
this analysis, we allow for both software-implemented signaling
protocol processors, as is common in most off-the-shelf switches
today, as well as hardware-accelerated signaling protocol engines.
Our research project on hardware-accelerated signaling is in support of a service concept in which dynamically provisioned highspeed end-to-end circuits are used for single file transfers. In this
application, signaling message loads will be extremely high since
call holding times will be short. For such a usage, we need a signaling transport solution that minimizes message transfer times.
Therefore this question of in-band versus out-of-band signaling
transport is relevant to our research. Our analysis shows that
with hardware-accelerated signaling engines, in-band signaling is
the better option, while in a network with only software signaling
processors, the out-of-band solution is better.
Service providers are given the flexibility to choose
between these two options. This work is intended to provide
some quantitative guidance to service providers on this question of which option to use. In order to carry out a quantitative
analysis, we need to characterize the signaling traffic load.
Since the signaling traffic load will be a critical parameter to
determine the answer, we need to consider the applications
expected for GMPLS signaling.
The two most commonly cited applications for GMPLS
networks are rapid provisioning and fast restoration. Rapid
provisioning is aimed at reducing the large delays incurred
today between when a customer requests a circuit, and when
the circuit becomes available for use. Many bandwidth-ondemand service providers envision providing customers access
to servers with web interfaces that can accept requests for connections and turn these into commands to the ingress node of
the connection (e.g., the customer’s router to/from which the
new connection is being requested). This ingress router would
then use GMPLS signaling to provision the connection through
a chain of SONET/SDH or WDM switches to the far-end
(egress) router specified in the customer’s request. The use of
GMPLS signaling and routing automates a process that currently needs manual intervention. While such requests will
generate some signaling load, we expect this load to be relatively low because of the nature of the application. Enterprise
and/or ISP network administrators making such bandwidth-ondemand requests to increase or decrease the capacity of their
enterprise wide-area access or inter-router links are not likely
to issue these requests too often. Furthermore call setup delays
in the order of seconds should be sufficient for this application,
given that even with this order of setup delays, the overall service would be a vast improvement over the current service.
Key words: Signaling, In-band, Out-of-band, Hardware-acceleration
I. INTRODUCTION
The Generalized Multi-Protocol Label Switching
(GMPLS) architecture [1] and associated signaling protocols
for Synchronous Optical NETwork (SONET)/Synchronous
Digital Hierarchy (SDH) and Wavelength Division Multiplexing (WDM) networks, such as Resource reSerVation ProtocolTraffic Engineering (RSVP-TE) [2], have been defined to
enable the deployment of dynamically controlled high-speed
circuit-switched networks. Equipment vendors for SONET/
SDH crossconnects and WDM optical crossconnects are
implementing these protocols. Networks equipped with these
signaling-enhanced circuit switches should be able to receive
requests for OC-1 (~51Mbps ) and higher-rate circuits, and
respond with dynamically provisioned circuits. While much
attention has been paid to the definition of signaling protocols,
little attention has been given to the transport mechanisms for
sending signaling messages between circuit switches. The
RSVP-TE specification [2] allows for the signaling messages
to be carried directly in IP packets or UDP datagrams, but it
does not constrain the links/paths used to transport these IP
packets in any way.
In the fast restoration application, GMPLS signaling is
used to establish replacement connections following a failure
thus saving a service provider protection-path bandwidth. This
application does require very low call-setup delays, if restoration is to replace protection as a solution for handling failures.
Furthermore, in this application, a large number of connections
may need to be re-established simultaneously, which implies
that a large number of signaling messages could be generated
in a short time. Switches will thus need the ability to handle
large call volumes.
Most vendors have allowed for two options for the signaling “links”: (i) in-band signaling channels, which are realized
as bandwidth set aside within user-plane interfaces between
two switches, e.g., the Data Communication Channel (DCC)
We proposed a third application class, file transfers, for
1
GMPLS-enabled high-speed circuit-switched networks [3].
Our work on this usage of GMPLS networks, called Circuitswitched High-speed End-to-End Transport ArcHitecture
(CHEETAH) is currently being sponsored in an eScience
project by the NSF. We identified file transfers as being ideally
suited for high-speed circuits given that a file transfer can take
advantage of any data rate it is provided (the higher the better),
and furthermore, a file transfer requires the movement of
stored data, which means there is no inherent burstiness in the
generation of data at the sender. The latter makes it ideal to
keep a circuit pipe fully utilized. However, file transfer times
can be quite short. For example, it takes only 800ms to transfer a 100MB file on an 1Gbps circuit. Therefore this application can be regarded as rather extreme in its generation of calls
and corresponding signaling message load. The in-band/out-ofband question becomes important in this application because of
its need to support high signaling loads and low setup delays.
OC
{
OC-1
(a) In-band signaling case 1
Fig. 2
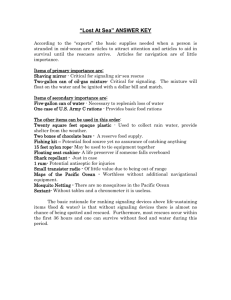
Fig. 1 illustrates the two options for signaling transport: inband signaling and out-of-band signaling.
R3
SW2
SW3
SW1
R4
R5
SW2
SW6
R6
IP network
SW3
SW1
SW4
SW5
(a) In-Band Signaling
Fig. 1
SW6
SW4
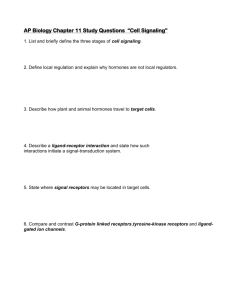
Three cases of in-band signaling
Unlike in telephone networks, when it was economically
feasible to create a dedicated connectionless packet-switched
network just for signaling traffic, in today’s environment, with
the ubiquity of the Internet, it is more likely that GMPLSenabled SONET/SDH/WDM circuit switches will leverage the
Internet for signaling message transport. A service provider
could simply connect the control processors of their GMPLS
enabled circuit switches to the Internet and expect it to route
signaling messages as needed. A potential drawback is latency.
We will create models for such out-of-band signaling channels
routed through the Internet, and analyze these models to predict performance.
II. IN-BAND AND OUT-OF-BAND SIGNALING OPTIONS
R2
(c) In-band signaling case 3
Fig. 1b illustrates the out-of-band signaling option. The key
difference is that the path taken by the signaling channel is necessarily different from the path taken by the user-plane interfaces that it supports. For example, the signaling channel could
pass through packet switches while the user-plane interfaces
are direct (logical or physical) between two switches. In other
words, the signaling channel is separate from and independent
of the data channel. A classical example of out-of-band signaling is the Signaling System 7 (SS7) network, which is used to
carry signaling messages between DS0-based telephone circuit
switches. SS7 is a connectionless packet-switched technology.
Section II describes the in-band and out-of-band transport
options. We describe our queueing models for the two options
in Section III, and provide numerical results of our comparison
in Section IV. Our conclusions are presented in Section V.
R1
(b) In-band signaling case 2
face is partitioned into signaling bandwidth and user-plane
bandwidth. For example, one or more OC-1s can be set aside
within each user-plane interface to exclusively carry signaling
messages (e.g. Fig. 2b shows an OC-1 signaling channel within
an OC-12 interface). In the second case, one or more OC-1s of
one user-plane interface between two switches, which are connected by N interfaces, are set aside for signaling, as shown in
Fig. 2c. The disadvantage of these two alternatives is that there
is revenue loss due to allocating user-plane bandwidth to signaling.
Call setup delay includes (i) signaling message processing
delays, (ii) round-trip propagation delay, and (iii) signaling
message emission delays. Toward reducing signaling message
processing delays, in an NSF-sponsored project [4], we implemented a subset of RSVP-TE in hardware to reduce the signaling message processing overhead to the order of microseconds.
The second component, round-trip propagation delay, cannot
be reduced due to speed-of-light constraints. The goal of this
work is to reduce the third component, emission delays, without of course compromising utilization. This led us to compare
in-band and out-of-band signaling transport architectures.
Signaling
User
-12
DCC
SW5
III. DELAY MODELS FOR THE TWO OPTIONS
(b) Out-of-Band Signaling
In-band and out-of-band signaling options
In this section, we set up and analyze models for the two
signaling transport options, in-band signaling and out-of-band
signaling. Our goal is to compute the total delay incurred in
processing and sending a signaling message from one switch to
the next successfully. This consists of the following components: (i) queueing delay plus service time at the signaling processor, (ii) queueing delay plus transmission time on the
signaling channel, (iii) total delay to successfully send the message on the signaling channel, which includes retransmissions
in case of errors. We list our assumptions and notation, and
then describe our queueing model.
In the in-band signaling option, the signaling traffic shares
the same channel as the data traffic. For example, the DCC
channel in SONET signal can be used to transport signaling
messages, as shown in Fig. 2a. However, the bandwidth of the
DCC channel is limited. For each separate OC-1 signal, the
Section DCC has a bandwidth of 192Kbps , and the Line DCC
of 576Kbps .
There are two alternatives that can overcome the bandwidth
limitation of the DCC channel. In the first case, a switch inter2
A. Assumptions
Table 1: Notation
We assume that the call arrival process is Poisson, which
has been shown to hold true for FTP applications in [6]. Each
call involves multiple signaling messages. For example, in
RSVP-TE, each call may involve Path messages, Resv messages, and PathTear/ResvTear messages. We assume the arrival
of signaling messages is also Poisson. Although the messages
involved in a call are related, we argue that since the duration
of a call is random, the arrival times of PathTear/ResvTear
messages are independent of those of Path and Resv messages.
Besides, after a switch sends out a Path message, the Path
message may go through a random number of downstream
switches before reaching the destination. The time to the reception of a Resv message following the transmission of a Path
message is thus randomized.
Symbol
qj
Service rate of the signaling channel transmitter
n
Number of GMPLS-enabled neighbors to a switch (also the
number of in-band signaling channels)
T tx
A random variable denoting the response time at the signaling
channel transmitter (waiting time plus service time)
Tn
One-way network delay in sending a signaling message from
one switch to the next
To
Initial time-out value of the retransmission timer at the sender
p
Probability of packet loss
q1
µ proc q 2
qn
µ txIB
1
µ txIB
µ
n
i =1
Fig. 3
2
IBn
tx
(a) In-Band Signaling, where
qi = 1
λ
µ proc
µ txOOB
(b) Out-of-Band Signaling
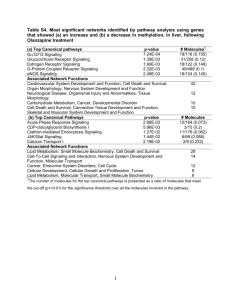
Queueing models of the signaling protocol processor and the signaling channel transmitters at a GMPLS enabled circuit switch
Fig. 3 illustrates our queueing models of these two servers
for both in-band and out-of-band solutions. In the in-band solution, there are n signaling channels given our assumption of n
GMPLS-enabled neighbors to the switch (see Table 1). In the
out-of-band solution, we assume that there is only one out-ofband signaling channel.
Given that the models shown in Fig. 3 are networks of
queues, we consulted the literature on modeling such queueing
networks. Most of the solutions for queueing networks, such as
Burke’s theorem and Jackson’s theorem, are for a network of
M/M/1 queues while in our case, as stated in subsection A, the
service times of both queues are deterministic.
Meaning
µ tx
A random variable denoting the response time at the signaling
protocol processor (waiting time plus service time)
λ
Table 1: Notation
Service rate of the signaling processor
T proc
1) Model without retransmissions
Our notation is shown in Table 1. In the rest of the paper,
the superscripts, OOB and IB, may be used on some of these
parameters as appropriate for out-of-band and in-band, respectively.
µ proc
in-band signaling channel; j = 1, …, n
There are two servers related to signaling at a GMPLSenabled circuit switch: (i) signaling protocol processor, and (ii)
signaling channel transmitter. We assume that the switch has a
single signaling protocol processor irrespective of whether the
signaling link solution is in-band or out-of-band. We first
describe our queueing model for the signaling protocol processor and the signaling channel transmitter without considerations of message loss and subsequent retransmissions. We
then improve this model by adding in the possibility of message loss and retransmissions.
B. Notation
Aggregate signaling message arrival rate
th
C. Queueing model
We assume that all messages fit in one packet, since the
maximum transmission unit size of most existing networks is
larger than the size of an RSVP-TE message.
λ
Probability of sending an outgoing signaling message to the
j
The service times at signaling processors and the transmission times at signaling channels are both assumed to be deterministic. The processing of different RSVP-TE signaling
messages takes different times, and Path message is the most
time consuming one. In [4], we introduced a pipelined architecture for hardware-acceleration of RSVP-TE signaling message processing. In order to achieve full pipelining and the
highest throughput, we purposely inserted dummy cycles when
processing Resv, PathTear, and ResvTear messages so that the
processing of all four messages will take the same number of
clock cycles. Even without such an implementation, the difference in processing times is not significant for different message type. As for the length of signaling messages, the Path
and Resv messages are roughly equivalent in size, while the
PathTear and ResvTear are roughly equivalent in size. The
approximate size is a few 100 bytes. Therefore we assume that
signaling processing times and signaling transmission times
are deterministic.
Symbol
Meaning
Even though there is no analytical derivation for a network
of queues with deterministic service times (to our knowledge),
it turns out that if we take into account practical considerations,
this network of queues reduces to a single M/D/1 queue. Our
reasoning is as follows. The service rate of the signaling pro3
cessor, µ proc , is determined by the switch vendor, while the
service rate of the signaling channel, µ tx , either in-band or
out-of-band, is determined by the service provider. We expect
the switch vendor to select µ proc so that the user-plane interfaces and the signaling protocol processor are equally utilized.
Once this decision is made, and a switch is manufactured,
µ proc is fixed. A service provider who purchases this switch
then has only one degree of freedom to choose an appropriate
bandwidth level for the signaling channels, i.e., the service provider can select µ tx .
channel. In the in-band solution, a similar reasoning holds if
the individual signaling channel rates are selected according to
the probabilities q j (see Fig. 3 and Table 1), i.e.,
IBj
µ tx = q j µ proc , j = 1, 2, …, n . Using the argument stated
before, we assume that the service provider will either choose
all the in-band signaling channel rates such that
IBj
µ tx = q j µ proc , or choose rates that are much lower,
IBj
µ tx « q j µ proc . Under these conditions, our earlier reasoning
The service provider should limit µ tx ≤ µ proc , because
choosing a µ tx larger than µ proc is an unnecessary waste of
bandwidth. Therefore we attempt to solve the network of
queues model in Fig. 3 for only two cases, µ tx = µ proc , and
µ tx < µ proc . We further limit the second case to only
µ tx « µ proc . Reasoning that a service provider may choose
µ tx < µ proc for costs reasons, we further argue that in this
case it is more likely that µ tx « µ proc because cost differentials for minor drops in transmission rates are often not significant (e.g., compare the cost of an 800Mbps circuit vs. a 1Gbps
circuit). Clearly the service provider should recognize that in
choosing this option instead of the µ tx = µ proc option, the
network is being planned for a lower call arrival rate than the
maximum rate for which the switch is designed.
of treating the queueing network as a single queue holds.
2) Model including retransmissions
In this model, we include the third component of the delay,
which is T n , the one-way network delay (see Table 1). This
delay is impacted by losses and retransmissions. Message loss
is possible irrespective of whether the signaling channel is inband or out-of-band. The reasons for message loss in the inband case are due to bit- and burst-errors on the links, and
receive-buffer overflows due to flow control problem. Bit- and
burst-link errors arise due to noise and interference on the
physical media. Even though optical fiber, the physical
medium of these high-speed circuit-switched networks, is
fairly reliable, link errors are unavoidable. Receive-buffer
overflows will occur if the signaling protocol processor at the
sending switch is faster than that at the receiving side. Since
different switch vendors could use different implementation
techniques for the signaling protocol processor, this flow control problem may arise. In the out-of-band solution, an additional cause of message loss is buffer overflow at any of the
routers on the path between the sending and receiving
switches.
For these two cases, µ tx = µ proc and µ tx « µ proc , the
queueing network model of Fig. 3 is reduced to a single M/D/1
queue. This is because under our assumption (see subsection
A) that the service time at the signaling protocol processor is
deterministic, the departure rate is no more than µ proc . If
µ tx = µ proc , the second server (signaling channel transmitter) will keep up with the arriving signaling messages. In other
words, the second queue is always empty, and the delay at the
second queue is solely the service time (or emission time). On
the other hand, if µ tx « µ proc , since λ ≤ µ tx for the system to
be stable, λ « µ proc , which implies that the first queueing system is lightly loaded. We therefore assume that when a signaling message arrives, it is served immediately and the first
queue is always empty.
Since RSVP-TE is specified to use UDP or raw IP, and
these protocols do not offer a reliable service, RFC 2961 [5]
proposed an exponential back-off retransmission algorithm to
provide reliability. Each message has a unique MESSAGE_ID,
and a timer starts counting after the message has been transmitted. If the corresponding acknowledgment (MESSAGE_ID_
ACK) is not received within a time-out threshold, the signaling
message is re-transmitted, the corresponding time-out threshold is doubled (starting from T 0 ).
For these two cases, µ tx = µ proc and µ tx « µ proc , the
queueing network model of Fig. 3 is reduced to a single queue.
The mean response time for a signaling message at a switch,
E [ T sw ] , is given by:
1
E [ T sw ] = E [ T proc ] + ------- , if µ tx = µ proc
µ tx
(1)
1
E [ T sw ] = E [ T tx ] + ------------- , if µ tx « µ proc
µ proc
(2)
λ
Transmitter
(1-p)
p
f(T0)
Fig. 4
Signaling channel transmitter model including retransmissions
Assuming that retransmissions will, in typical implementations, join the signaling channel transmitter queue, and that it is
valid to rewrite (1) to be the same as (2) (in other words for
both cases, µ tx = µ proc , and µ tx « µ proc , we use (2)), we
redraw the model for the second queue (the signaling channel
transmitter) as shown in Fig. 4. With probability p , a message
where E [ T proc ] is the mean response time at the signaling
protocol processor queue, and E [ T tx ] is the mean response
time at the signaling channel transmitter queue (see Fig. 3).
The above reasoning applies directly to the out-of-band
case (Fig. 3b) since in this case there is only one signaling
4
is lost, which means a time-out occurs, and the message is
retransmitted. To model exponential doubling, we show the
time-out value as a function f of the initial time-out value T o .
where ρ = λ ⁄ µ tx . The first term, 1 ⁄ µ proc , is common to
both in-band signaling and out-of-band signaling. Therefore,
p , µ tx , and T n determine which is better, in-band signaling or
The mean response time at the transmitter queue, E [ T tx ] is
a sum of the mean waiting time, E [ W ], and the service delay
(which is a constant, 1 ⁄ µ tx , given our assumptions). The
mean waiting time, E [ W ], can be computed assuming that the
message arrival rate at the transmitter queue is given by:
λ
λ + λp + λp + λp + … = ---------------(1 – p)
2
3
out-of-band signaling under different sets of conditions. We
consider different numerical values for these input parameters
and compare the two signaling transport solutions.
IV. NUMERICAL RESULTS
(3)
A. Input parameter values
Table 2: Input parameter values
but for small p , this can be approximated to λ .
Since in RSVP-TE, the signaling protocol processor is also
involved in handling retransmissions, the same load appears at
both the signaling protocol processor and the signaling channel
transmitter. Thus, rewriting (1) to be same as (2) is not affected
because of retransmissions.
Symbol
Varied from 0.01µ tx to 0.95µ tx
µ proc
200, 000 /sec, hardware signaling
µ tx
µ tx = 200 /sec, software signaling
(4)
n
2
5 and 10 . For the purpose of comparison, the aggregate
bandwidths of in-band and out-of-band signaling are the same,
3
3p ( 1 – p ) + 7p ( 1 – p ) + … )
IBj
therefore µ tx
The explanation for the above equation is as follows. The
first two terms, 1 ⁄ µ proc and T n , correspond to the processing
delay and the time to transmit a message successfully one-way
from the sending switch to the receiving switch. The next term
corresponds to the mean response time (mean waiting time
plus mean service time) waiting in the signaling channel transmitter queue. This delay is incurred once if the first transmission is successful (probability ( 1 – p ) ), twice if the first
transmission is unsuccessful but the second transmission is a
success and so on. The last term in (4) corresponds to the timeout value, which is being doubled for every retransmission.
1
p
1
E [ T ] = ------------- + T n + ------------ E [ T tx ] + --------------- T 0
1–p
1 – 2p
µ proc
qj
IBj
Tn
OOB
Tn
IBj
(5)
p
p
th
in-band signaling channel; j = 1, …, n
0.2ms in metro area
25ms in wide area
0.5ms and 1ms in metro area
OOB
IBj
OOB
IBj
3T n
OOB
3T n
10
–8
and 10
–4
1% and 5%
With hardware-accelerated signaling engine [4], RSVP-TE
signaling messages can be processed within several microseconds. Accordingly we assume µ proc is 200, 000 /sec for a
hardware-accelerated signaling engine and 200 /sec for a software signaling processor.
(6)
Using the mean response time of an M/D/1 queue for
E [ Ttx ] , we have:
ρ
1 – --1
1+p
2 1
1
E [ T ] = ------------- + ------------ ⋅ ------------ ⋅ ------- + --------------- T n
µ proc 1 – p 1 – ρ µ tx 1 – 2p
⁄n
35ms and 45ms in wide area
To
To
OOB
= µ tx
Probability of sending an outgoing signaling message to the
j
Assuming T 0 = 3T n (counting round-trip network delay
and other minor delays), (5) can be re-written as:
1
1+p
1
E [ T ] = ------------- + ------------ E [ T tx ] + --------------- T n
1
–
p
1
– 2p
µ proc
µ tx = 200, 000 /sec, hardware signaling, µ tx = µ proc
µ tx = 40, 000 /sec, hardware signaling, µ tx « µ proc
2p ( 1 – p ) + 3p ( 1 – p ) + … ) ] + T 0 ( p ( 1 – p ) +
2
λ
200 /sec, software signaling
Using µ proc , T n , T tx , T 0 , and p (see Table 1), and the
retransmission algorithm described above, we determine the
mean total time to process and send the outgoing signaling
message successfully to the next-hop switch as:
E [ T ] = 1 ⁄ µ proc + T n + [ ( E [ T tx ] ) ( ( 1 – p ) +
Value
For hardware-accelerated signaling, when µ tx = µ proc ,
µ tx is 200, 000 /sec; when µ tx « µ proc , we assume
1
, or 40, 000 /sec. For software signaling, even
µ tx = --- µ
5
when µ tx proc
= µ proc , µ tx is 200 /sec or 200kbps (assuming
125 bytes or 1000 bits per message). Considering the fact that
(7)
5
even a single SDCC channel has a bandwidth of 192kbps ,
assigning µ tx a value less than 200 /sec is impractical. Therefore we do not consider µ tx « µ proc for software signaling.
delay is negligible. For in-band signaling, the values of p
–8
IBj
–4
we use are 10 and 10 (see Table 2). In Fig. 5 and all following figures, we cannot observe notable difference between
In order to choose reasonable values for T n and p , we refer
to the National Laboratory for Applied Network Research
(NLANR)1 for Round-Trip Time (RTT) and packet loss rate
measurements. We randomly chose North Carolina University
(NCSU) as our starting point. For the data collected on June
14, 2004, we noticed that the RTT between NCSU and the
North Carolina GigaPOP, is 1ms . We used the corresponding
one-way delay, 0.5ms , for our metro setting. The distance
between these two locations is 20.6 miles. The propagation
delay is around 0.16ms . We also notice that in a similar geographical distance (22.6 miles to be accurate), the RTT
between NCSU and University of North Carolina, Chapel Hill
(UNC) is 2ms , or 1ms for one-way. The different RTTs may
result from different network conditions. Based on the data
OOB
obtained from NLANR, we choose 0.5ms and 1ms for T n
IBj
in the metro area. We choose 0.2ms for T n , since this delay
is mainly propagation delay. In the wide area, for example
from NCSU to locations in California, the RTTs range from
75ms (California Institute of Technology, CIT) to 89.99ms
(San Diego State University, SDSU). We choose 35ms and
OOB
IBj
, and 25ms for T n (propagation delay). The
45ms for T n
reason we allow for both a metro-area and a wide-area setting
is that some service providers may connect two signalingenabled switches located across a wide-area with logical links
making them neighbors from a signaling point of view. In the
telephone network, for example, many carriers do interconnect
signaling-enabled switches in California directly via logical
links (for the user-plane interfaces) with switches in New York.
in-band signaling cases of p
IBj
= 10
–4
and p
IBj
= 10
–8
.
Fig. 6 shows the total mean delay in the wide area. Here,
the total delay is even more dominated by T n , which is significantly higher than the first two terms of (7), and hence in-band
signaling outperforms out-of-band signaling.
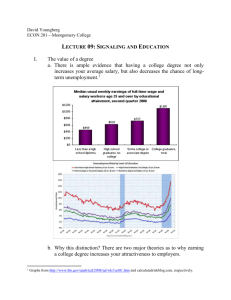
Fig. 5
In-band/out-of-band signaling with hardware signaling,
metro area, µ tx = µ proc
Fig. 6
In-band/out-of-band signaling with hardware signaling,
wide area, µ tx = µ proc
OOB
We choose 1% and 5% for p
. As we explained before,
even for in-band signaling, bit- and burst-link errors, buffer
IBj
–4
overflows may cause packet loss. For p , we choose 10
–8
and 10 .
In the following subsections, we will show the delays under
different scenarios. In each case, we vary the aggregate signaling message arrival rate, from 0.01µ tx to 0.95µ tx , to show
the delays under different loads.
C. Hardware-accelerated signaling engine, and µ tx « µ proc
B. Hardware-accelerated signaling engine, and µ tx = µ proc
From Fig. 5, we can observe that in the metro area, when
hardware-accelerated signaling is used and µ tx = µ proc , inband signaling always outperforms out-of-band signaling.
Referring to (7), the first two terms are relatively small (in the
order of µs ) when compared to T n , which is in the order of
ms . Thus, the total delay is mainly determined by T n . Since
IBj
Tn
is less
OOB
than T n ,
Fig. 7
the in-band solution does better.
In-band/out-of-band signaling with hardware signaling,
metro area, µ tx « µ proc
When µ tx « µ proc , for hardware-accelerated signaling,
According to (7), when p is small, its impact on the total
the first term of (7) is still negligible, but the queueing delay at
the transmitter (i.e., the second term of (7)) becomes compara-
1. http://www.nlanr.net
6
dominate the total delay.
ble to the third term in the metro area setting, where T n is in
the hundreds of
µs . When
ρ
In the wide area (Fig. 10), the choice between in-band and
out-of-band signaling really depends on the choices of parameters. When T n = 35ms and p=1%, out-of-band signaling demonstrates the best performance. But we do note that the RTT
measurements obtained from the NLANR site were made primarily on Internet2, which is lightly loaded. On the Internet,
RTTs are likely to be significantly higher. In this case, even
with software signaling processors, the network delay may
dominate, making in-band signaling a better choice.
is high, the factor
( 1 – ρ ⁄ 2 ) ⁄ ( 1 – ρ ) starts increasing to the point where the second term dominates the total mean delay. In this case the outof-band signaling outperforms in-band signaling because µ tx
is a five times higher in the out-of-band case than in the inband case (see Table 2). In the wide area, T n still dominates
and hence the lower rate of the in-band channel is compensated
by the increased T n of the out-of-band solution.
Fig. 8
V. CONCLUSIONS
We compared in-band and out-of-band signaling transport
options under assumptions of the switches having hardwareaccelerated signaling engines or software signaling processors.
With hardware signaling engines, if the bandwidth allocated
for the in-band signaling channels is in par with the speeded-up
processing rates, then the main source of delay in sending a
signaling message is the network delay. Using an out-of-band
path through the public Internet could make this component
significant and thus obliterate the gains in call setup delays
made with hardware signaling engines. In this case, fast inband signaling channels are required. In the parameters we
considered, this required setting aside one OC1 for each neighbor switch to which there could potentially be a large number
of interfaces, each at a multi-OC1 rate. On the other hand, with
software signaling processors, we found that network delays
matter much less, and hence the cheaper out-of-band public
Internet option is sufficient in the metro area. But in the wide
area, in-band signaling is typically a better option.
In-band/out-of-band signaling with hardware signaling,
wide area, µ tx « µ proc
D. Software signaling processor
ACKNOWLEDGMENT
This work is sponsored by an NSF ANIR grant, 0087487.
This work also benefits from an NSF EIN grant, 0335190, and
an NSF ITR grant, 0312376.
Fig. 9
REFERENCES
In-band/out-of-band signaling with software signaling, metro area
[1]
[2]
[3]
[4]
[5]
Fig. 10
[6]
In-band/out-of-band signaling with software signaling, wide area
[7]
From Fig. 9, we can observe that out-of-band signaling outperforms in-band signaling in the metro area when software
signaling processors are used. This is because the message processing delay and emission delays (first two terms of (7)) will
7
E. Mannie, “Generalized Multi-Protocol Label Switching (GMPLS) Architecture,” IETF Internet Draft, May 2003.
L. Berger, “Generalized Multi-Protocol Label Switching (GMPLS) Signaling Resource ReserVation Protocol-Traffic Engineering (RSVP-TE)
Extensions,” IETF RFC 3473, Jan. 2003.
M. Veeraraghavan, X. Zheng, H. Lee, M. Gardner, and W. Feng,
“CHEETAH: Circuit-switched High-speed End-to-End Transport ArcHitecture,” Proc. of Opticomm2003, Dallas, TX, 2003.
H. Wang, M. Veeraraghavan, R. Karri, and T. Li, “A Hardware-Accelerated Implementation of the RSVP-TE Signaling Protocol,” Proc. of
ICC2004, Paris, France, 2004.
L. Berger, D. Gan, et al., “RSVP Refresh Overhead Reduction Extensions,” IETF RFC 2961, April 2001.
V. Paxon and S. Floyd, “Wide-Area Traffic: The Failure of Poisson
Modeling,” IEEE/ACM Transactions on Networking, Vol.3, June 1995.
Donald Gross, Carl M. Harris, Fundamentals of Queueing Theory, 3rd
edition, Wiley-Interscience, 1998.