J. theor. Biol. (2002) 218, 55–70
doi:10.1006/yjtbi.3057, available online at http://www.idealibrary.com on
A Mathematical Model of a Biological Arms Race with a Dangerous Prey
Paul Waltmanw , James Braselton*z and Lorraine Braseltonz
wDepartment of Mathematics and Computer Science, Emory University, Atlanta, GA 30322, U.S.A.
and zDepartment of Mathematics and Computer Science, Georgia Southern University, P.O. Box 8093,
Statesboro, GA 30460-8093, U.S.A.
(Received on 25 January 2002, Accepted in revised form on 15 April 2002)
In a recent paper, Brodie and Brodie provide a very detailed description of advances and
counter-measures among predator–prey communities with a poisonous prey that closely
parallel an arms race in modern society. In this work, we provide a mathematical model and
simulations that provide a theory as to how this might work. The model is built on a twodimensional classical predator–prey model that is then adapted to account for the genetics
and random mating. The deterministic formulation for the genetics for the prey population
has been developed and used in other contexts. Adapting the model to allow for genetic
variation in the predator is much more complicated. The model allows for the evolution of
the poisonous prey and for the evolution of the resistant predator. The biological paradigm is
that of the poisonous newt and the garter snake which has been studied extensively although
the models are broad enough to cover other examples.
r 2002 Elsevier Science Ltd. All rights reserved.
1. Introduction
This paper develops a mathematical model of a
biological arms race between a class of predators
and a class of prey where the prey is dangerous
to the predator. In their survey article, Brodie &
Brodie (1999) describe predator–prey arms races
and draw interesting parallels with the more
familiar arms races of modern society, using
as one example law enforcement and speeding
motorists. The biological arms race has also
appeared in the popular media, PBS (2001). The
most interesting example described in Brodie &
Brodie (1999) concerned the unusual predator–
*Corresponding author. Tel.: +1-912-681-0874; fax:
+1-912-681-0654.
E-mail address: waltman@mathcs.emory.edu
(P. Waltman), jimbras@gsvms2.cc.gasou.edu (J. Braselton),
loribras@gsvms2.cc.gasou.edu (L. Braselton).
0022-5193/02/$35.00/0
prey relationship of the garter snake Thamnophis
sirtalis (predator) and the Oregon newt Taricha
granulosa (prey). The newt defends itself by
producing a toxin, tetrodotoxin (TTX). The
snake is the only known predator of the Oregon
newt that has developed resistance to TTX. The
TTX need not cause the death of a garter snake
directly: when a snake consumes a newt, it may
be immobilized by the TTX contained in the
newt’s skin for several hours. In this state, the
snake is susceptible to other predators and, if it
cannot move, may not be able to thermoregulate
properly, and may die, Brodie & Brodie (1999).
The newt–garter snake predator–prey relationship is a particular example of a biological
arms race where the prey is dangerous to the
predator. The prey (newt) develops a defense
against the predator by becoming poisonous
to the predator. The predator (garter snake)
r 2002 Elsevier Science Ltd. All rights reserved.
56
P. WALTMAN ET AL.
develops a resistance to the prey’s toxicity. The
interactions involving dangerous prey are different from other predator–prey relationships and
result in a co-evolutionary biological arms race.
Although the snake–newt relationship is unusual, predator–prey arms races are not and have
been observed in a variety of predator–prey
relationships. Brodie & Brodie (1999) and the
references cited there provide many details and
field data. We use this newt–garter snake
relationship to guide the development of the
mathematical model using continuous models
from population genetics and standard ecological models. Adaptation in the prey produces
selection pressure on the predator. Our approach
uses continuous models that incorporate both
genetic and ecological considerations and allow
a genotype of the prey to be lethal to some
genotypes of the predator. Although complicated, numerical simulations can be easily
carried out. These simulations are presented in
a sequence of graphs. The model can also include
the more typical arms race: ‘‘the fox lineage may
evolve improved adaptations for catching rabbits and the rabbit lineage improved adaptations
for escaping’’ (quoted from Dawkins & Krebs,
1979).
For the prey’s growth, we use the logistic
equation, one of the building blocks of population ecology. A derivation and the fitting of a
great deal of biological data can be found in
Hutchinson (1978, Chapter 1). The equation is
also studied in standard elementary differential
equations course and appears in many texts, for
example in Abell & Braselton (2000). We add to
logistic growth one of the standard prey capture
functions. There is a great deal of literature on
predator–prey models: Freedman (1980) devotes
a chapter to such Kolmogorov models and our
beginning, ecological model is a special case of
those considered there. We then seek to add the
genetics to the model in such a way that when
capture parameters are all equal, the model
reduces to the basic, well-established, predator–
prey equations.
A broad overview of predator–prey interactions and co-evolution is given by Abrams
(2000). Deterministic genetic models were developed in a fundamental paper by Nagylaki &
Crow (1974) and have been used by Beck (1982,
1984) in a model of cystic fibrosis and in a model
of co-evolution and by Beck et al. (1982, 1984) in
infectious disease models. There is also work,
using the approach of Nagylaki and Crow for
models of growth with genotypic fertility differences, Hadeler & Lieberman (1975), Butler et al.
(1981), Hadeler & Glas (1983). So (1986) and
Josic (1997). Discrete models with fertility
differences are considered in Doebeli (1997)
and Doebeli & de Jong (1998). Freedman &
Waltman (1978). So & Freedman (1986), Freedman et al. (1987) and So (1990) use continuous
formulation in a model of predator–prey systems
where only the genetics of the prey is modeled. A
discussion of the general topic of an arms race
can be found in Dawkins & Krebs (1979) where
many examples are mentioned as well as Epstein
(1997). The predator–prey dynamics by their
classification is ‘‘asymmetric’’ or ‘‘attackdefense’’ type and, of course, inter-specific. The
fact that the prey is dangerousFthe prey can
kill the predatorFdifferentiates our model of
an arms race from those involving mimicry or
physical improvements of the prey or the
predator, like those referenced above.
Although, introducing genetics into the logistic equations is fairly straightforward, incorporating them into the predator systems is more
difficult because one of the basic assumption
of predator–prey systems is that growth comes
from prey capture, not just the quantity of
predators. We believe that the model of predator
growth through prey capture, when the capture
rates differ, is new.
2. The Basic Model
We begin with a standard predator–prey
equation of Kolmogorov type
x mxy
x0 ¼ ax 1 K
aþx
mx
y ¼y
s :
aþx
0
ð1Þ
The basic working assumption is that when the
genetics, introduced below, are not relevant to
the predator–prey interactions, then the system
with genetics should reduce to eqn (1). Equation
(1) often occurs with other parameters, for
57
MATHEMATICAL MODEL OF A BIOLOGICAL ARMS RACE
y
0.8
0.6
0.5
x
0.4
0.4
0.3
0.2
0.2
y
(a)
10
20
30
40
0.1
50
t
(b)
0 .10. 20. 30. 40. 5
x
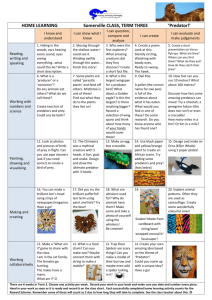
Fig. 1. (a) Predator–prey time course: parameters as above with m ¼ 2:5; a ¼ 0:37; s ¼ 1:1; K ¼ 1; a ¼ 1:2: (b) Phaseplane plot corresponding to (a).
example, a conversion constant to convert
captured prey to predator biomass or an extra
rate constant in front of the predator equation.
These may be scaled out and we assume that
scaling has been done. One could also scale the
parameter K out of the system but we choose to
retain it. The prey capture term is of Monod type
(also called a Hollings Type II response) which is
usually justified as allowing for prey-handling
time. m reflects the difficulty of prey capture, s is
the death rate of the predator in the absence of
prey, and a and K are discussed below when
considering the logistic equation. Figure 1(a)
shows the time course of the predator–prey
system. We have selected the parameters to be
in the oscillatory range for this system. The
corresponding phase plane plot is given in
Fig. 1(b).
We begin with the growth of the prey without
a predator which, is assumed in eqn (1) to follow
a basic logistic equation,
x
:
x0 ¼ ax 1 K
the form
x01 ¼ a
x02 ¼ 2a
1
x2 2 a
x1 þ
x1 x;
x
K
2
1
x2 x2 a
x1 þ
x3 þ
x2 x;
x
K
2
2
x03 ¼ a
1
x2 2 a
x3 þ
x3 x
x
K
2
with initial conditions x1 ð0Þ ¼ x10 ; x2 ð0Þ ¼ x20 ;
x3 ð0Þ ¼ x30 :
Built into this format is the interpretation of
the logistic equation that growth is represented
by the linear term (ax) and (natural) death by the
quadratic term (x2 =K) although other interpretations are possible (and will not affect the work
here). The principal result of Freedman &
Waltman (1978) for eqn (3) is that the three
genotypes evolve (have limits) in the ratio ðx1 :
x2 : x3 Þ ¼ ðc2 : 2c : 1Þ where
ð2Þ
K is called the ‘‘carrying capacity’’ and reflects
the level to which the prey will grow if there
are no predators. a reflects the rate at which
the prey approaches the carrying capacity.
The prey are divided into three classes representing three genotypes and random mating is
assumed. The usual classification of a one locus,
two allele problem is labeled AA; Aa; aa;
corresponding to two choices of an allele at
one location. There is a deterministic formulation of the evolution of the genotypes, Nagylaki
& Crow (1974), Butler et al. (1981) which takes
ð3Þ
c¼
x10 þ 12x20
:
x30 þ 12x20
This reflects the basic Hardy–Weinberg principle
for random mating in an asymptotic form.
Adding the three equations in eqn (3) with xðtÞ ¼
x1 ðtÞ þ x2 ðtÞ þ x3 ðtÞ recovers the logistic equation (2), that is, the total grows logistically.
In Fig. 2(a), we illustrate the evolution of the
genotypes. The total (x) follows a typical logistic
equation. We take the parameters (arbitrarily) to
be a ¼ 1:2; and K ¼ 1: As to be expected, growth
occurs according to Hardy–Weinberg proportions without selection. Selection is illustrated by
58
P. WALTMAN ET AL.
1
1.2
x
AA
0.8
0.6
0.6
Aa
AA
0.4
0.4
0.2
0.2
aa
(a)
x
1
0.8
5
10
15
20
t
Aa
aa
10
5
(b)
15
20
t
Fig. 2. (a) The evolution of three genotypes following logistic growth. The initial conditions are x1 ð0Þ ¼ 0:06; x2 ð0Þ ¼
0:1; x3 ð0Þ ¼ 0:02: (b) The evolution of three genotypes where x1 has an increase in its growth rate from 1.2 to 1.31. The
Genotypic
Prey
0.2
Proportions
0.8
0.175
AA
0.15
0.6
0.125
0.1
AA
Aa
0.075
0.05
0.4
0.2
0.025
(a)
10
20
30
40
aa
t
50
(b)
10
20
30
40
Aa
aa
t
50
Fig. 3. (a) The prey population broken into three genotypes with x1 ð0Þ ¼ 0:02; x2 ð0Þ ¼ 0:002; x3 ð0Þ ¼ 0:001; and yð0Þ ¼
0:1: (b) The genotypic frequencies corresponding to (a).
increasing the value of a in its first occurrence
in the equation for x1 : Keeping all of the other
parameters the same and replacing the value a ¼
1:2 by 1:31 in its first occurrence in the equation
for x1 yields Fig. 2(b). Clearly, the AA genotype
is replacing the others in the mix. This is
expected and shown here to illustrate that the
continuous version of the evolution of genotypes
matches the discrete one.
We now add a predator to the system that
preys equally on each of the three genotypes. As
with all simple models we also assume that the
predator feeds exclusively on this prey. While
that is not realistic, to assume otherwise either
requires that one know the other prey and
add them to the model or to assume that the
predator also has a logistic growth term in
addition to the prey, which does not allow one to
separate out the effects of this particular prey.
One hopes that the simple model captures the
essence of the effect even if it is not totally
realistic in modeling the natural situation. The
equations become
x01 ¼ a
1
x2 2 a
x1 mxy
x1 x x1 þ
;
x
K
2
x aþx
x02 ¼ 2a
1
x2 x2 a
x2 mxy
x1 þ
;
x3 þ
x2 x x
K
2
2
x aþx
x03 ¼ a
1
x2 2 a
x3 mxy
x3 þ
;
x3 x x
K
2
x aþx
y0 ¼ y
mx
s :
aþx
ð4Þ
Again, adding the prey equations produces a
standard predator–prey system (1).
In Fig. 3(a), the prey is broken in three
genotypes, showing that each oscillates as
expected. The initial conditions are x1 ð0Þ ¼
0:02; x2 ð0Þ ¼ 0:002; x3 ð0Þ ¼ 0:001; and yð0Þ ¼
0:1; the system is prejudiced in favor of AA:
Since the predominant prey is AA we have
broken the graph at the top in order to show the
others because aa has such small numbers it does
not show clearly in the graph. Figure 3(b), which
is uninteresting in this context but will be
important in the discussion that follows, plots
the evolution of the relative proportions of the
three genotypes. After a slight adjustment at
the beginning, the frequencies are constant.
The figures illustrate that breaking the prey
59
MATHEMATICAL MODEL OF A BIOLOGICAL ARMS RACE
We take m1 ¼ m2 ¼ 2:5 as in the previous
computations but reduce the capture rate for
the aa genotype (x3 ) by 10% to 2:25%: This
means that x3 is more difficult or less desirable to
capture corresponding to a genetic trait as noted
above. For example, x3 may be faster or quicker
at turning when being pursued making it more
difficult to capture; x3 may exhibit coloring or
a marking that causes the prey y to find it
undesirable; x3 may taste bad so that when y
captures it, y ‘‘spits it’’ out leaving it unharmed,
which has been observed in some newt–snake
interactions; x3 may secrete a chemical that
causes it to smell bad to y and so on. We plot the
evolution of the predator and the three prey
genotypes in separate graphs. To make this
evolution more dramatic we also plot the
evolution of the relative frequencies in Fig. 4(c).
The elusive prey has become the established
prey; contrast Fig. 4(c) with Fig. 3(b). The
predator survives but at a lower level.
A more serious capture avoidance can lead to
the extinction of the predator. If instead of
reducing the capture rate by 10%; the improvement in the prey’s ability to avoid capture
reduces the capture rate to 50%; then the
predator becomes extinct. The prey again is
dominated by aa although the route is not
smooth as in the previous case. Figures 5(a) and
(b) show the predator and prey time courses and
Fig. 5(c) shows the evolution of the relative
frequencies.
Of course, a 50% improvement represents a
drastic step. Although we do not consider the
case here, one might want to model the
improvement as a separate process, allowing
gradual improvement in avoiding capture. This
could probably be done with a multi-locus model
which would introduce considerable complexity.
population into three genotypes preserves the
expected predator–prey behavior. In what follows we will disturb this basic predator–prey
relations to formulate the models of the arms
race.
3. Elusive and Poisonous Prey
In this section, we let the prey develop a
defense against the predator. Defenses are
evolutionary traits that can be physical (faster,
quicker turning, etc.), passive (camouflage),
offensive (poisonous) or a combination of these
and give the prey a survival advantage. We also
consider the possibility that a poisonous prey
is able to alter the predator capture rate. We
assume that the trait is genetic and by convention we let the ‘‘special’’ prey be of the aa type,
denoted by x3 ðtÞ: Complete dominance of A is
assumed so that neither AA nor Aa are elusive or
dangerous (produce a toxin). We illustrate how
these different strategies affect the evolution of
the genotypes. We first relabel the m parameter
in eqn (4) to be m1 ; m2 ; m3 ; respectively, to
produce the system
x01 ¼ a
x02 ¼ 2a
1
x2 2 a
x1 m1 xy
x1 x x1 þ
;
x
K
2
x aþx
1
x2 x2 a
x2 m2 xy
x1 þ
;
x3 þ
x2 x x
K
2
2
x aþx
x03 ¼ a
1
x2 2 a
x3 m3 xy
x3 x x3 þ
;
2
x aþx
x
K
m1 x1 þ m2 x2 þ m3 x3
s :
y ¼y
aþx
0
y
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.3
0.2
0.1
100
200
Genotypic
1
0.8
aa
0.6
Aa
0.4
Prey
Predator
0.4
(a)
ð5Þ
300
t
400
(b)
AA
aa
200
AA
0.2
Aa
100
Proportions
300
400
t
(c)
100
200
300
400
t
Fig. 4. Evolution of the (a) predator and (b) prey with an elusive prey and m1 ¼ m2 ¼ 2:5; m3 ¼ 2:25: (c) Evolution of
the relative frequencies of an elusive prey.
60
P. WALTMAN ET AL.
y
Predator
Genotypic
0.8
0.3
0.6
0.2
0.4
0.1
0.2
(a)
Prey
1
0.4
20
40
60
80
100
aa
(b)
aa
0.6
0.4
0.2
Aa
AA
t
Proportions
0.8
20
40
60
80
100
t
Aa
AA
(c)
20
40
60
80
100
t
Fig. 5. Evolution of the (a) predator and (b) prey with an elusive prey (aa) and with m1 ¼ m2 ¼ 2:5; m3 ¼ 1:125: (c)
Evolution of the relative frequencies of an elusive prey.
y
Predator
0.3
0.2
0.1
(a)
20
40
60
80 100
t
(b)
Genotypic
Prey
0.2
0.175
0.15
0.125
0.1
0.075
0.05
0.025
0.4
Proportions
0.8
AA
Aa
AA
0.6
0.4
0.2
20
40
60
aa
t
80 100
(c)
20
40
60
Aa
aa
t
80 100
Fig. 6. (a) Evolution of the (a) predator and (b) prey with a poisonous prey with low initial density. (c) Evolution of the
relative frequencies of a poisonous prey with low initial density.
We now turn to another improvement in the
development of the prey, a poisonous genotype.
The snake and newt system discussed in the
Introduction is the prime example of such a
system. We again assume that the poisonous
prey is represented by the aa genotype and that
its consumption is fatal to the predator. As
noted in the Introduction, this is an extreme
assumption because most newts may only render
the snake immobile for a while and the snake is
subject to other forces while in this state. A
‘‘correction’’ factor could be entered in the
removal term for the predator but the value of
such a correction factor seems unlikely to be
known. The equations for a poisonous prey take
the form
x01 ¼ a
1
x2 2 a
x1 mxy
x1 x x1 þ
;
2
x aþx
x
K
x02 ¼ 2a
x03 ¼ a
1
x2 x2 x1 þ
x3 þ
x
2
2
a
x2 mxy
x2 x ;
K
x aþx
1
x2 2 a
x3 mxy
x3 x x3 þ
;
x
K
2
xaþx
y0 ¼ y
mðx1 þ x2 Þ
mx3 y
s :
aþx
aþx
ð6Þ
The Monod term, formerly reflecting the added
growth of the predator by capturing x3 ; now no
longer does so and, in addition, the capture of x3
contributes to the death rate of the predator. We
use the same parameters as before with initial
conditions x1 ð0Þ ¼ 0:02; x2 ð0Þ ¼ 0:002; x3 ð0Þ ¼
0:001; which represents a rare, poisonous prey.
We plot the predator evolution, prey evolution,
and the evolution of the relative frequencies
in Fig. 6. Although the predator is diminished
slightly, almost nothing changes from the
original model (4). From the standpoint of
the predator, this is an acceptable ecosystem.
The poisonous prey is providing a type of
‘‘group defense’’ with little effect.
However, if the initial density of the poisonous
prey is high, the results are disastrous for the
predator. The same three plots follow in Fig. 7
except that now the initial conditions are x1 ð0Þ ¼
0:02; x2 ð0Þ ¼ 0:002; and x3 ð0Þ ¼ 0:03:
These figures illustrate what could happen if
the density of the poisonous prey becomes high.
However, if the genetic event occurs from a
random mutation that makes the prey lethal to
the predator but does not give the prey a survival
advantage, Fig. 6 shows that the poisonous
prey will not achieve high enough densities to
eliminate the predator.
Now suppose the poisonous prey has a slight
advantage, like those described earlier, that
makes it less susceptible to being captured. The
model is adjusted to take this into consideration
61
MATHEMATICAL MODEL OF A BIOLOGICAL ARMS RACE
y
1
Predator
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
5
(a)
10
Prey
1
15
20
t
(b)
Genotypic
0.5
0.4
0.3
0.2
0.1
Aa
aa
AA
5
10
15
20
t
(c)
Proportions
Aa
aa
AA
5
10
15
20
t
Fig. 7. (a) Evolution of the (a) predator and (b) prey where aa corresponds to the poisonous prey with high initial
density. (c) Evolution of the relative frequencies of a poisonous prey with high initial density.
y
Predator
1
1
0.8
0.8
0.6
0.6
0.4
0.4
50
(a)
100
150
200
t
(b)
Proportions
0.8
0.6
Aa
AA
0.2
0.2
Genotypic
Prey
50
100
aa
150
Aa
0.4
0.2
200
t
(c)
aa
AA
50
100
150
200
t
Fig. 8. Evolution of the (a) predator and (b) prey with a poisonous prey low initial density and a slight advantage in
capture avoidance. aa corresponds to the poisonous prey with low initial density and a slight advantage in capture
avoidance. (c) Evolution of the relative frequencies of a poisonous prey with low initial density and a slight advantage in
capture avoidance.
and becomes
x01 ¼ a
1
x2 2 a
x1 m1 xy
x1 x x1 þ
;
x
K
2
x aþx
x02 ¼ 2a
x03 ¼ a
1
x2 x2 x1 þ
x3 þ
x
2
2
a
x2 m2 xy
x2 x ;
K
x aþx
1
x2 2 a
x3 m3 xy
x3 x x3 þ
;
x
K
2
x aþx
m1 x1 þ m2 x2
m3 x 3 y
y ¼y
:
s aþx
aþx
0
to dominate, causing extinction of the predator.
(cf. Fig. 8 with Fig. 6).
If the poisonous prey becomes established at a
high level it eliminates the predator. If it has an
advantage in avoiding capture (or detection),
it first out-competes its rivals because of the
advantage of a lower capture rate, and thus
moves from an extremely low level to a
significant level, eliminating the predator.
Snakes have been observed ‘‘spitting out’’ the
newt (Brodie, private comm., 2001) which would
give it a slightly diminished capture rate, i.e.,
m3 omaxfm1 ; m2 g:
If the predator does not respond with a genetic
alteration, it will become extinct. Hence, one has
the next step in the arms race.
ð7Þ
We take m1 ¼ m2 ¼ 2:5 and m3 ¼ 2:25 and
initial conditions x1 ð0Þ ¼ 0:02; x2 ð0Þ ¼ 0:002;
and x3 ð0Þ ¼ 0:001: This reflects genetic change
by giving the poisonous prey a slight advantage
in capture avoidance but also a very low initial
size, as would be expected after an advantageous
mutation has occurred. Figure 8 shows an
opening salvo in the biological arms race: even
though x3 has a very low initial size its
advantage in avoiding the predator allows x3
4. The Arms Race
We now let the predator, y; evolve with
immunity to the dangerous prey, x: (We have
in mind the example of the poisonous newt and
the garter snake discussed in the Introduction
where the garter snake acquires resistance to the
toxin produced by the newt, but the model will
have wider applicability.) At the key locus we
denote the genotype for the predator as BB; Bb;
and bb and label the concentrations of each by
y1 ; y2 ; and y3 ; respectively. We assume that bb is
62
P. WALTMAN ET AL.
the resistant genotype. The redistribution of the
genotypes due to random mating is much more
delicate than that of the prey discussed previously. In the case of the model of the prey, the
growth rate is constant (a) so the increase in prey
depends on the numbers in each class, but in the
case of the model of the predator, growth
follows from prey capture.
Since the model is somewhat complicated, we
develop it in stages in hopes of achieving greater
clarity for the form of the final model. If x
denotes the concentration of the prey (we ignore
genotypes at first) and y; the predator, the
increase in the concentration of the predator is
driven by the Monod term
mxy
:
aþx
We seek to incorporate the distribution of
genotypes using this term. As long as there are
no genotypic differences affecting predator–prey
reactions, a basic hypothesis is that one must be
able to recombine the genotypes into the basic
predator–prey system which we have assumed
from the beginning to be of the form
x mxy
0
;
x ¼ ax 1 K
aþx
mx
0
y ¼y
s :
aþx
(The y terms cancel.) The basic assumption of
predator–prey models is that the captured prey
translates to growth of the predator. For a single
prey, x; this leads to the equations
mx
y2 2
y1 þ
sy1 ;
ða þ xÞðy1 þ y2 þ y3 Þ
2
mx
y2 2
y3 þ
sy3 :
ða þ xÞðy1 þ y2 þ y3 Þ
2
ð9Þ
If one adds the last three equations in the system,
then using y ¼ y1 þ y2 þ y3 reproduces the basic
predator–prey equations (8).
We now rewrite the system with the full prey
genotypes, borrowing from the prey equations
developed in the previous section. The model
takes the form (where we are expansive in the
notation to illustrate the effect of incorporating
the genotypes for both predator and prey)
x01 ¼
a
x2 2 ax1 ðx1 þ x2 þ x3 Þ
x1 þ
x1 þ x2 þ x3
K
2
x02 ¼
mx1 ðy1 þ y2 þ y3 Þ
;
a þ x1 þ x2 þ x3
2a
x2 x2 x1 þ
x3 þ
x1 þ x2 þ x3
2
2
ð8Þ
yi mxy
:
y aþx
y01 ¼
y03 ¼
We assume that the prey captured by yi is the
fraction of the total catch that yi represents in
the population:
x mxðy1 þ y2 þ y3 Þ
;
x0 ¼ ax 1 K
aþx
mx
ða þ xÞðy1 þ y2 þ y3 Þ
y2 y2 y1 þ
y3 þ
sy2 ;
2
2
y02 ¼ 2
x03
ax2 ðx1 þ x2 þ x3 Þ mx2 ðy1 þ y2 þ y3 Þ
;
K
a þ x1 þ x2 þ x3
a
x2 2 ax3 ðx1 þ x2 þ x3 Þ
¼
x3 þ
x1 þ x2 þ x3
K
2
mx3 ðy1 þ y2 þ y3 Þ
;
a þ x1 þ x2 þ x3
y01 ¼
mðx1 þ x2 þ x3 Þ
ða þ x1 þ x2 þ x3 Þðy1 þ y2 þ y3 Þ
y02 ¼ 2
y1 þ
y2 2
sy1 ;
2
mðx1 þ x2 þ x3 Þ
ða þ x1 þ x2 þ x3 Þðy1 þ y2 þ y3 Þ
y2 y2 y1 þ
y3 þ
sy2 ;
2
2
MATHEMATICAL MODEL OF A BIOLOGICAL ARMS RACE
y03 ¼
mðx1 þ x2 þ x3 Þ
ða þ x1 þ x2 þ x3 Þðy1 þ y2 þ y3 Þ
y3 þ
y2 2
sy3 :
2
Again, if one adds the first three equations and
the last three equations, the basic predator–prey
equation (8) is reproduced. At this point the
model with three genotypes for each has not
changed. However, suppose that each prey has a
different capture rate which we denote by m1 ;
m2 ; and m3 ; respectively. Then we produce a new
model for predator–prey interactions. Note the
assumption that the capture rate is dependent on
the x genotype and not on the y genotype, that
is, all y genotypes capture a given x genotype
equally. To conserve notation, we return to
using x ¼ x1 þ x2 þ x3 and y ¼ y1 þ y2 þ y3 for
the respective sum of genotypes if there is no
multiplication by an mi : For brevity, we let
Tðx1 ; x2 ; x3 Þ ¼ m1 x1 þ m2 x2 þ m3 x3 :
The model takes the form
a
x2 2 ax1 x m1 x1 y
;
x01 ¼ x1 þ
x
K
aþx
2
x02 ¼
2a
x2 x2 ax2 x m2 x2 y
x1 þ
;
x3 þ
x
K
aþx
2
2
The variables in this model do not add to
reproduce eqn (8) unless m1 ¼ m2 ¼ m3 : However, eqn (10) could be used to model the
‘‘elusive’’ prey case discussed previously.
We now turn to the main development, a
model for the poisonous prey and the resistant
predator. We remind the reader that we take the
poisonous prey to be the aa genotype (denoted
by x3 ) and the resistant predator to be the bb
genotype (denoted by y3 ). The consumption of
x3 by y1 or y2 does not lead to added growth (so
the term must be subtracted from the preceding
model) and does lead to increased death (so a
term must be added to the intrinsic death rate).
However, the consumption of x3 by y3 does lead
to increased growth. Thus, the distribution of
genotypes will not be as convenient as that
expressed in eqn (9). For y1 ; the growth term
becomes [corresponds to eqn (9)]
Tðx1 ; x2 ; 0Þy1 1 Tðx1 ; x2 ; 0Þy2 2
þ
2
aþx
aþx
Tðx1 ; x2 ; x3 Þy
aþx
¼
Tðx1 ; x2 ; 0Þ2
y2 2
y1 þ
:
ða þ xÞTðx1 ; x2 ; x3 Þy
2
Similarly, the term for y2 becomes
Tðx1 ; x2 ; 0Þy1 1 Tðx1 ; x2 ; 0Þy2
Tðx1 ; x2 ; x3 Þy3 1 T ðx1 ; x2 ; 0Þy2
þ
þ
2
2
aþx
aþx
aþx
aþx
Tðx1 ; x2 ; x3 Þy
aþx
1
1
ðTðx1 ; x2 ; 0Þy1 þ Tðx1 ; x2 ; 0Þy2 ÞðTðx1 ; x2 ; x3 Þy3 þ Tðx1 ; x2 ; 0Þy2 Þ
2
2
¼
Tðx1 ; x2 ; x3 Þyða þ xÞ
a
x2 2 ax3 x m3 x3 y
x3 þ
;
x
K
aþx
2
T ðx1 ; x2 ; x3 Þ
y2 2
y01 ¼
sy1 ;
y1 þ
ða þ xÞy
2
T ðx1 ; x2 ; x3 Þ
y2 y2 y02 ¼ 2
y1 þ
y3 þ
sy2 ;
ða þ xÞy
2
2
T ðx1 ; x2 ; x3 Þ
y2 2
y3 þ
sy3 :
y03 ¼
ða þ xÞy
2
x03 ¼
63
while that of y3 becomes
Tðx1 ; x2 ; x3 Þy3 1Tðx1 ; x2 ; 0Þy2 2
þ
2
aþx
aþx
Tðx1 ; x2 ; x3 Þy3
aþx
1
ðTðx1 ; x2 ; x3 Þy3 þ Tðx1 ; x2 ; 0Þy2 Þ2
2
¼
Tðx1 ; x2 ; x3 Þða þ xÞy
64
P. WALTMAN ET AL.
We now incorporate these ideas into the model
of a biological arms race:
a
x2 2 ax1 x m1 x1 y
;
x01 ¼ x1 þ
x
K
aþx
2
2a
x2 x2 ax2 x m1 x2 y
x1 þ
;
x3 þ
x02 ¼
x
K
aþx
2
2
a
x2 2 ax3 x m3 x3 y
;
x03 ¼ x3 þ
x
K
aþx
2
y01 ¼
Tðx1 ; x2 ; 0Þ2
y2 2
y1 þ
ða þ xÞTðx1 ; x2 ; x3 Þy
2
y02
m3 x 3 y 1
sy1 ;
aþx
1
Tðx1 ; x2 ; 0Þy1 þ Tðx1 ; x2 ; 0Þy2
2
¼2
Tðx1 ; x2 ; x3 Þy
1
Tðx1 ; x2 ; x3 Þy3 þ Tðx1 ; x2 ; 0Þy2
2
aþx
m3 x3 y2
sy2 ;
aþx
y03
1
ðTðx1 ; x2 ; x3 Þy3 þ Tðx1 ; x2 ; 0Þy2 Þ2
2
¼
sy3 :
Tðx1 ; x2 ; x3 Þða þ xÞy
ð11Þ
Figure 9 shows a typical arms race. The
parameters have been selected to show an
oscillatory case and the initial conditions
reflect zero poisonous prey and resistant predators but a very small number of heterozygotes
carrying one copy of the respective alleles. An
even lower number of heterozygotes (reflecting a
random perturbation) would present the same
result but with a longer time-scale. An intuitive
explanation begins with the fact that x1 and y1
dominate the initial configuration that would be
in a oscillatory regime, if they were the only
organisms present. Gradually, because of the
lower capture rate, x3 ; the poisonous prey, outcompetes x1 and x2 and lowers the predator
pressure by increasing the death rate of y1 and y2 :
This allows for the emergence of y3 ; the resistant
predator. Finally, y3 and x3 coexist in an
oscillatory regime. This result is more dramatically portrayed in Fig. 10 which plots total prey
x ¼ x1 þ x2 þ x3 and total predators, y ¼ y1 þ
y2 þ y3 against time in the middle part of the
evolution.
The reader is reminded that x and y are sums
of components of a system of differential
equations and do not satisfy a two-dimensional
system as Fig. 10 might suggest. However, if one
accepts that the functions x1 ðtÞ; x2 ðtÞ; y1 ðtÞ; and
y2 ðtÞ all tend to zero as t tends to infinity, as
the computations suggest, then eqn (11) is an
asymptotically autonomous system with limiting
equations of the form (8) with m ¼ m3 and the
other parameters as specified. Of course, the
Prey
0.6
0.5
0.4
0.3
0.2
0.1
x1
x2
1000
x3
2000
3000
4000
5000
t
Predator
0.6
0.5
0.4
0.3
0.2
0.1
y1
y3
y2
1000
2000
3000
4000
5000
t
Fig. 9. Co-evolution of predator and prey using parameter values m1 ¼ m2 ¼ 2:5; m3 ¼ 2:45; a ¼ 0:37; s ¼ 1:1; a ¼ 1:2
and initial conditions x1 ð0Þ ¼ 0:6; x2 ð0Þ ¼ 0:02; x3 ð0Þ ¼ 0; y1 ð0Þ ¼ 0:6; y2 ð0Þ ¼ 0:02; and y3 ð0Þ ¼ 0:01:
65
MATHEMATICAL MODEL OF A BIOLOGICAL ARMS RACE
0.3
3250
0.25
3500
0.2
0
3750
y
0.5
t
0.4
4000
0.3
4250
x
0.2
Fig. 10. Co-evolution of the total predator population, y ¼ y1 þ y2 þ y3 ; and the total prey population, x ¼ x1 þ x2 þ
x3 ; using the same parameter values and initial conditions as in Fig. 9.
Prey
0.8
0.6
x1
x2
x3
0.4
0.2
200
400
600
t
Predator
0.6
0.5
0.4
0.3
0.2
0.1
y1
y2
200
y3
400
600
t
Fig. 11. Co-evolution of predator and prey using parameter values m1 ¼ m2 ¼ 2:5; m3 ¼ 2; a ¼ 0:37; s ¼ 1:1; a ¼ 1:2
and initial conditions x1 ð0Þ ¼ 0:6; x2 ð0Þ ¼ 0:02; x3 ð0Þ ¼ 0; y1 ð0Þ ¼ 0:6; y2 ð0Þ ¼ 0:02; and y3 ð0Þ ¼ 0:
predator–prey relationship need not be oscillatory and Figs 11 and 12 show a similar evolution
but with the parameters chosen so that the
limiting system is in a steady state.
If the parameter m3 is lowered even
farther, it is possible for the prey to cause
extinction of the predator as illustrated in
Fig. 13. Essentially, x3 out-competes x1 and x2
but y3 cannot exist on x3 alone and thus becomes
extinct. The levels are so low that they do not
really show on the graph; however, the prey sum
is tending to K ¼ 1 so no predators will be
present.
An important question remains: should
the capture rate for x3 by y3 be the same as that
by the others? It is possible to alter the model
to allow the capture rate to be dependent on
both the prey and the predator genotypes by
replacing mi by mij : This is a major increase
in complexity and, in addition, it is unlikely that
such parameters could be realistically determined.
However, to answer the question as to
whether the dominant conclusion is due to the
low capture rate, we make a final alteration
to the model to allow the capture of x3 (only) to
be different for y3 : To avoid an unnecessarily
66
P. WALTMAN ET AL.
0.6
0
0.4
0.2
0
200
t
y
0
1
0.75
0.5
x
0.25
400
600 0
Fig. 12. Co-evolution of predator y ¼ y1 þ y2 þ y3 and prey x ¼ x1 þ x2 þ x3 using the same parameter values and
initial conditions as in Fig. 11.
Prey
0.6
0.5
0.4
0.3
0.2
0.1
x2
x1
x3
100
200
300
200
300
t
Predator
0.6
0.5
0.4
0.3
0.2
0.1
y1
y2
100
t
Fig. 13. Co-evolution of predator and prey using parameter values m1 ¼ m2 ¼ 2:5; m3 ¼ 1:7; a ¼ 0:37; s ¼ 1:1; a ¼ 1:2
and initial conditions x1 ð0Þ ¼ 0:6; x2 ð0Þ ¼ 0:02; x3 ð0Þ ¼ 0; y1 ð0Þ ¼ 0:6; y2 ð0Þ ¼ 0:02; and y3 ð0Þ ¼ 0:
complex model, we allow just two capture
rates: m is the capture rate of x1 and x2 by all
predators and of x3 by y3 : We retain the capture
rate notation m3 for the capture of x3 by y1
and y2 : The total capture of prey by predators is
given by
mxy3 þ ðy1 þ y2 ÞTðx1 ; x2 ; x3 Þ
;
aþx
We incorporate this into model (11) to obtain
x01 ¼
x02 ¼
x03 ¼
2a
x2 x2 a x2 x mx2 y
x1 þ
;
x3 þ
x
K
aþx
2
2
a
x2 2 ax3 x x3 ðm3 ðy1 þ y2 Þ þ my3 Þ
x3 þ
;
x
K
aþx
2
where
Tðx1 ; x2 ; x3 Þ ¼ mx1 þ mx2 þ m3 x3 :
a
x2 2 ax1 x mx1 y
x1 þ
;
x
K
aþx
2
y01 ¼
m2 ðx1 þ x2 Þ2
ða þ xÞðmxy3 þ ðy1 þ y2 ÞTðx1 ; x2 ; x3 ÞÞ
67
MATHEMATICAL MODEL OF A BIOLOGICAL ARMS RACE
Prey
0.6
0.5
0.4
0.3
0.2
0.1
x1
x2
1000
x3
2000
3000
4000
t
5000
Predator
0.6
0.5
0.4
0.3
0.2
0.1
y1
y2
1000
y3
2000
3000
4000
t
5000
Fig. 14. Co-evolution of predator and prey using parameter values m ¼ 2:5; m3 ¼ 2:45; a ¼ 0:37; s ¼ 1:1; a ¼ 1:2 and
initial conditions x1 ð0Þ ¼ 0:6; x2 ð0Þ ¼ 0:02; x3 ð0Þ ¼ 0; y1 ð0Þ ¼ 0:6; y2 ð0Þ ¼ 0:02; and y3 ð0Þ ¼ 0:01:
0.3
3000
0.25
y
0.2
0
3500
0.15
0
0.5
0.4
0.3
x
4000
t
0.2
4500
Fig. 15. Co-evolution of predator y ¼ y1 þ y2 þ y3 and prey x ¼ x1 þ x2 þ x3 using the same parameter values and
initial conditions as in Fig. 14.
y2 2 m3 x3 y1
y1 þ
sy1 ;
2
aþx
1
mðx1 þ x2 Þðy1 þ y2 Þ
0
2
y2 ¼ 2
mxy3 þ ðy1 þ y2 ÞTðx1 ; x2 ; x3 Þ
Predator
and Prey
0.35
0.3
y3
0.25
1
ðmxy3 þ mðx1 þ x2 Þy2 m x y
3 3 2
2
sy2 Þ;
aþx
aþx
1
ðmxy3 þ mðx1 þ x2 Þy2 Þ2
2
y03 ¼
sy3 :
ðmxy3 þ ðy1 þ y2 ÞT ðx1 ; x2 ; x3 ÞÞða þ xÞ
ð12Þ
0.2
x1
x2
0.15
0.1
0.05
x3
9960
9970
9980
9990
Fig. 16. Figure 14 for 9950ptp10 000:
10000
t
68
P. WALTMAN ET AL.
Prey
0.6
0.5
0.4
0.3
0.2
0.1
x2
x1
x3
100
200
300
400
t
500
Predator
0.6
0.5
0.4
0.3
0.2
0.1
y3
y1
y2
100
200
300
400
t
500
Fig. 17. Co-evolution of predator and prey using parameter values m ¼ 2:1; m3 ¼ 1:9; a ¼ 0:37; s ¼ 1:1; a ¼ 1:2 and
initial conditions x1 ð0Þ ¼ 0:6; x2 ð0Þ ¼ 0:02; x3 ð0Þ ¼ 0; y1 ð0Þ ¼ 0:6; y2 ð0Þ ¼ 0:02; and y3 ð0Þ ¼ 0:01:
1
0.8
0
0.6
200
0.4
0
y
0.2
0
400
0
0.8
0.6
0.4 x
0.2
600
t
800
1000
0
Fig. 18. Co-evolution of the total prey and total predator using parameter values as in Fig. 17.
We repeat the first two simulations above for
eqn (12) with the same parameters and initial
conditions; the results are shown in Figs 14
and 15.
We next plot a short time period to illustrate
the periodic nature of the final outcome in
Fig. 16.
In this case, all three prey genotypes survive
but only the resistant predator, y3 ; survives. The
arms race ends as it had begun but with only
the resistant predator surviving. This is to be
expected since now y3 feeds equally on all prey
genotypes, so x3 cannot eliminate its competitors
although it does eliminate the non-resistant
predators. However, it does increase its relative
frequency during the time that y1 and y2
dominate the mix. Thus its final proportion is
much higher than if the same problem was
simulated with only the resistant predator
present (and the same prey initial conditions).
The choice between eqns (11) and (12) could be
decided by observable data. If a territory could
be found where the resistant predator dominates
but the non-poisonous prey survives in quantity,
MATHEMATICAL MODEL OF A BIOLOGICAL ARMS RACE
then eqn (12) is supported. Figure 15 shows the
three-dimensional plot of total prey and total
predators against time.
The result need not be oscillatory as Figs 17
and 18 illustrate.
5. Conclusion
We have provided a model of a biological
arms race motivated by a predator–prey system
where the prey develops the ability to produce a
toxin against the predator and then the predator
responds with resistance to the toxin. We have as
a biological model that of the newt–garter-snake
relationship studied by Brodie and Brodie (1999).
Our model and simulations seem to capture most
of the points discussed there. The principal
modeling difficulty was to expand the deterministic genetic modeling to the predator dynamics
where growth depends on prey capture.
One thinks of the genetic change as occurring
by a random mutation that we model by taking a
very small initial condition in the differential
equations. The simulations seem to show that the
poisonous prey cannot become established in
large enough numbers to affect the system without having an advantage. Then we assumed that
the special prey has an advantage with respect to
prey capture. This is also observed in the newt–
snake system: the poisonous prey sometimes
escapes the predator’s grasp alive. The size of
the advantage determines how rapidly the system
evolves but any advantage will lead to establishment. Once the poisonous prey is established in
sufficient quantities, the non-resistant predators
face extinction (although this is an artifact of our
assumption that it lives only on this prey) and the
resistant predator does not have this added death
rate and thus thrives. The arms race ends as it
began except with slightly altered players. The
next step in the arms race requires a new
mutationFperhaps an altered poison.
The model suffers the usual deficiencies of
predator–prey models in that it assumes the
predator lives exclusively on the prey. It also
presumes that the change in the genetic trait is at
one locus whereas major alterations usually
reflect multiple loci. Additional loci can be
included in the model at a considerable increase
in complexity but well within the reach of
69
modern computers. In the model of So (1990)
two loci are considered and the number of
equations increase from three to nine. Additional alleles can also be included. However, the
assumptions here are no worse than those
usually associated with such systems. Genetic
improvement often comes at a cost, usually
reflected in a lower reproduction rate. For the
poisonous newt this seems not to be the case (or
it is negligible). That is not the case with the
garter snake as Brodie & Brodie (1999) show
that the resistant snake has a lower sprint
velocity that would be modeled in our system
by a change in capture rate. We feel that this can
be incorporated into a more general model,
alluded to in the main text, by making the
capture rate dependent on both predator and
prey genotypesFintroducing mij instead of mi :
We hope to do this in a later study.
All of the differential equations were solved with,
and all of the figures created with, Mathematica 4,
Wolfram Research, Inc., 1999. (see Wolfram, 1999).
The authors wish to thank Edmund D. Brodie III for
communicating his insights regarding predator–prey
arms races and to thank Martha Abell for assistance
with the graphics.
The research of Paul Waltman was supported by
National Science Foundation Grant, DMS-9801622.
REFERENCES
Abell, M. L. & Braselton, J. P. (2000). Modern
Differential Equations, 2nd Edn, Fort Worth, TX:
Harcourt College Publishers.
Abrams, P. A. (2000). The evolution of predator–prey
interactions: theory and evidence. Ann. Rev. Ecol. Syst.
31, 79–105.
Beck, K. (1982). A model of population genetics of cystic
fibrosis in the United States. Math. Biosci. 58, 243–257.
Beck, K. (1984). Coevolution: mathematical analysis of
host–parasite interactions. J. Math. Biol. 19, 63–67.
Beck, K., Keener, J. P. & Ricciardi, P. (1982). Influence
of infectious disease on the growth of a population with
three genotypes. In: Lecture Notes in Biomathematics,
Vol. 52. New York: Springer.
Beck, K., Keener, J. P. & Ricciardi, P. (1984). The effect
of epidemics on genetic evolution. J. Math. Biol. 19,
79–94.
Brodie, E. D. III & Brodie, E. D. Jr (1999). Predator prey
arms races: asymmetrical selection on predators and prey
may be reduced when prey are dangerous. BioScience 49,
557–568.
Butler, G. J., Freedman, H. I. & Waltman, P. (1981).
Global dynamics of a selection model for the growth of
a population with genotypic fertility differences. J. Math.
Biol. 12, 25–35.
70
P. WALTMAN ET AL.
Dawkins, R. & Krebs, J. R. (1979). Arms race between
and within species. Proceedings of the Royal Society of
London. Series, Biological Sciences. 205, 489–511.
Doebeli, M. (1997). Genetic variation and the persistence
of predator–prey interactions in the Nicholson–Bailey
model. J. theor. Biol. 188, 109–120.
Doebeli, M. & de Jong, G. (1998). A simple genetic model
with non-equilibrium dynamics. J. Math. Biol. 36,
550–536.
Epstein, J. M. (1997). Nonlinear Dynamics: Mathematical
Biology and Social Sciences, Santa Fe Institute Studies
in the Sciences of Complexity. Reading, MA: AddisonWesley.
Freedman, H. I. (1980). Deterministic Mathematical
Models in Population Ecology. New York: Marcel Dekker.
Freedman, H. I. & Waltman, P. (1978). Predator influence
on the growth of a population with three genotypes.
J. Math. Biol. 6, 367–374.
Freedman, H. I., So, J. W.-H. & Waltman, P. (1987).
Predator influence on the growth of a population with
three genotypes III. J. Math. Anal. Appl. 128, 287–304.
Hadeler, K. P. & Glas, D. (1983). Quasimonotone
systems and convergence to equilibrium in a population
genetic model. J. Math. Anal. Appl. 95, 297–303.
Hadeler, K. P. & Lieberman, V. (1975). Selection
models with fertility differences. J. Math. Biol. 2,
19–32.
Hutchinson, G. E. (1978). An Introduction to Population
Ecology. New Haven, CT: Yale University Press.
Josic, K. (1997). Local bifurcations in the symmetric model
of selection with fertility differences. J. theor. Biol. 189,
291–295.
Nagylaki, T. & Crow, J. F. (1974). Continuous selection
models. J. Theor. Popul. Biol. 5, 267–283.
PBS video (2001). Nature: Triumph of Life: The Eternal Arms
Race (video). Available at: http://www.shoppbs.com.
So, J. W.-H. (1986). Analysis of a continuous one-locus,
two-allele genetic model with genotypic fertility differences. Math. Biosci. 82, 221–233.
So, J. W.-H. (1990). Persistence and extinction in a
predator prey model consisting of nine prey genotypes.
J. Austr. Math. Soc. 31, 347–365.
So, J. W.-H. & Freedman, H. I. (1986). Persistence and
global stability in a predator prey model consisting of
three prey genotypes with fertility differences. Bull. Math.
Biol. 48, 469–484.
Wolfram, S. (1999). The Mathematica Book, 2nd Edn.
Cambridge: Cambridge University Press.