EECS 242B Fall 2014 Prof. Ali M. Niknejad
advertisement

MEMS Reference Oscillators
EECS 242B
Fall 2014
Prof. Ali M. Niknejad
Why replace XTAL Resonators?
• XTAL resonators have excellent performance in
terms of quality factor (Q ~ 100,000), temperature
stability (< 1 ppm/C), and good power handling
capability (more on this later)
• The only downside is that these devices are bulky and
thick, and many emerging applications require much
smaller form factors, especially in thickness (flexible
electronics is a good example)
• MEMS resonators have also demonstrated high Q and
Si integration (very small size) ... are they the solution
we seek?
• Wireless communication specs are very difficult:
• GSM requires -130 dBc/Hz at 1 kHz from a 13 MHz oscillator
• -150 dBc/Hz for far away offsets
Ali M. Niknejad
University of California, Berkeley
EECS 242B, Slide:
2
Business Opportunity
• XTAL oscillators is a $4B market.
Even capturing a
small chunk of this pie is a lot of money.
• This has propelled many start-ups into this arena
(SiTime, SiClocks, Discera) as well as new approaches
to the problem (compensated LC oscillators) by
companies such as Mobius and Silicon Labs
• Another observation is that many products in the
market are programmable oscillators/timing chips that
include the PLL in the package. • As we shall see, a MEMS resonator does not make
sense in a stand-alone application (temp stability), but
if an all Si MEMS based PLL chip can be realized, it can
compete in this segment of the market
Ali M. Niknejad
University of California, Berkeley
EECS 242B, Slide:
3
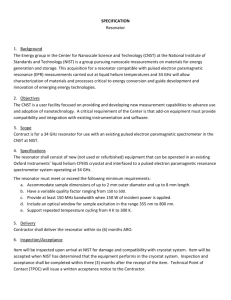
Series Resonant Oscillator
2478
• The motional resistance of
MEMS resonators is quite
large (typically koms
compared to ohms for XTAL)
and depends on the fourth
power of gap spacing
• This limits the power handling
capability
the
1. General topology for a series-resonant oscillator.
• Also, in order not to de-Q Fig.
tank, an amplifier with low
Ramp Rx + Ri + Ro = Rtot
a recently demonstrated 10-MHz oscilla
input/output impedance is Unfortunately,
using a variant of the above CC-beam resonator togeth
required. A trans-resistancewith an off-the-shelf amplifier exhibits a phase noise of on
80 dBc/Hz at 1-kHz carrier offset, and 116 dBc/Hz
amplifier is often used
far-from-carrier offsets [10]—inadequate values caused main
by the insufficient power-handling ability of the CC-bea
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCEmicromechanical
OSCILLATORS, IEEE JOURNAL
OF SOLID-STATE
CIRCUITS,
VOL. 39,
NO. 12, DECEMBER 2004 !
resonator
device
used
[22].
This Berkeley
work demonstrates the impact of EECS
micromechani
Ali M. Niknejad
University of California,
242B, Slide: 4
Zero’th Order Leeson Model
2kT (1 + FRamp )
L {fm } =
·
Po
⇥ ⇤
Rtot
· 1+
Rx
f0
2Ql · fm
⇥2 ⌅
Rx
Rx
Ql =
Q=
Q
Rx + Ri + R o
Rtot
• Using a simple Leeson model, the above expression for
phase noise is easily derived.
• The insight is that while MEMS resonators have excellent
Q’s, their power handling capability will ultimately limit
the performance. • Typically MEMS resonators amp limit based on the nonlinearity of the resonator rather than the electronic nonlinearities, limiting the amplitude of the oscillator
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004 !
Ali M. Niknejad
University of California, Berkeley
EECS 242B, Slide:
5
IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
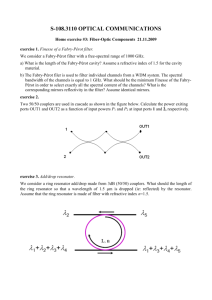
MEMS Resonator Designs
TABLE I
RESONATOR DESIGN EQUATION SUMMARY
• Clampled-clamped beam and wine disk resonator are very
populator. Equivalent circuits calculated from
electromechanical properties.
• Structures can be fabricated from polysilicon (typical
dimensions are small ~ 10 um)
• Electrostatic transduction is used (which requires large
voltages > 10 V).
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004 !
Ali M. Niknejad
University of California, Berkeley
EECS 242B, Slide:
6
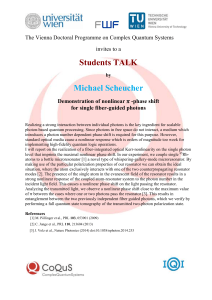
CC-Beam Resonator
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS
used (with the more accurate, but cumbersome, form given
varies through the beam
in Table I). As the frequency of
resonance frequency, the output motional current magnitude
traces out a bandpass biquad frequency spectrum identical to
that exhibited by an LCR circuit, but with a much higher than
normally achievable by room temperature electrical circuits.
Fig. 3 presents the SEM and measured frequency characteristic
(under vacuum) for an 8- m-wide, 20- m-wide-electrode,
10-MHz CC-beam, showing a measured of 3100.
The values of the motional elements in the equivalent circuit
of Fig. 2 are governed by the mass and stiffness of the resonator,
and by the magnitude of electromechanical coupling at its transducer electrodes. Equations for the elements can be derived by
determining the effective impedance seen looking into the resFig. 2. Perspective view schematic and equivalent circuit of a CC-beam
(a) SEM
and [5],
(b) frequency
(measured
port
and cancharacteristic
be summarized
asunder 20-mtorr
micromechanical resonator under a one-port bias and excitation scheme. Fig. 3. onator
vacuum) for a fabricated CC-beam micromechanical resonator with an
8- m-wide beamwidth and a 20- m-wide electrode.
• This example uses an 8-μm wide beamwidth and a
is the radian resonance frequency, all other variables are specwhere
has been
ified in Fig. 2, and an approximate form for
Fig. 4. (a) SEM and (b)
vacuum) for a fabricated
featuring large beam a
(6)
power-handling
ability. N
Fig. 3 comes mainly fro
dc-bias and a larger electr
and
are the effective stiffness and mass
of the resonator beam, respectively, at its midpoint, both given
in Table I, and is the electromechanical coupling factor. The
represents the static overlap capacitance between
capacitor
the input electrode and the structure.
Of the elements in the equivalent circuit, the series motional is 8.27 k , which is
is perhaps the most important for oscillator mally exhibited by q
resistance
design of the sustain
and
design, since it governs the relationship between
at resonance, and thereby directly influences the loop gain of
the oscillator system. For the CC-beam resonator of Fig. 2, B. Wide-Width CC-B
can be further specified approximately
the expression for
One convenient m
(neglecting beam bending and distributed stiffness [5]) as
handling
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12,power
DECEMBER
2004 ! is to
For example, the wi
Ali M. Niknejad
University of California, Berkeley
242B, Slide:
increased
from 87 to
(7) EECS
20-μm wide electrode. • Measurements are performed in vacuum.
• Q ~ 3000 for a frequency of 10 MHz
CC-Beam with Better Power Handling
ANICAL RESONATOR REFERENCE OSCILLATORS
ic (measured under 20-mtorr
chanical resonator with an
ode.
2481
• To increase power handling of the resonator, a wider beam
Fig. 4. (a) SEM and (b) frequency characteristic (measured under 20-mtorr
vacuum) for a fabricated wide-width CC-beam micromechanical resonator,
and higher
featuring large beam and electrode widths for lower
power-handling ability. Note that the difference in frequency from that of
Fig. 3 comes mainly from the larger electrical stiffness caused by a higher
dc-bias and a larger electrode-to-beam overlap.
width is used [~10X in theory].
• The motional resistance is reduced to 340 ohms (Vp =
13V)
ctive stiffness and mass
ts midpoint, both given
cal coupling factor. The
ap capacitance between
is 8.27 k , which is quite large compared with the 50 normally exhibited by quartz
which complicates the
University crystals,
of California, and
Berkeley
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004 !
cuit, the series motional
Ali M. Niknejad
mportant
for oscillator
EECS 242B, Slide:
8
tance
, versus
m,
m,
pite a decrease in
Disk Wineglass Resonator
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS
IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
2483
(T 1.16) is positive), giving this device a pass-through nature
at resonance with a 0 phase shift from the -axis (input)
electrode to the -axis (output) electrode.
The two-port nature of this device whereby the input and
output electrodes are physically distinct from the resonator itself further allows a bias and excitation configuration devoid of
the bias tee needed in Fig. 2, hence, much more amenable to
on-chip integration. In particular, the applied voltages still conand an ac input signal , but now
sist of a dc bias voltage
can be directly applied to the resonator itself without the
need for a bias tee to separate ac and dc components. Similar
to the CC-beam, these voltages result in a force proportional to
that drives the resonator into the wine glass vithe product
bration mode shape when the frequency of matches the wine
glass resonance frequency, given by [30]
for more effier .
o prevent
(9)
dth increases.
nd
versus
in , the net
where
In particular,
am resonator Fig. 6. (a) Perspective-view schematic of a micromechanical wine glass-mode
disk resonator in a typical two-port bias and excitation configuration. Here,
m-wide device electrodes labeled A are connected to one another, as are electrodes labeled
V), B. (b) Wine-glass mode shape simulated via finite element analysis (using Fig. 7. (a) SEM and (b)–(c) frequency characteristics (measured under
20-mtorr vacuum with different dc bias voltages) of a fabricated 60-MHz wine
quency spec- ANSYS). (c) Equivalent LCR circuit model.
glass disk resonator with two support beams.
that although
0 to 1036 as a a free–free mode shape. Free–free beam micromechanical resthan two or- onators have been successfully demonstrated, one with a fre- approximate expression for
takes on a similar form to that
on-chip spiral quency of 92 MHz and a of 7450 [29].
of (7), and can be written as
pplications.
Even better performance, however, can be obtained by
(10)
portantly, the abandoning the beam geometry and moving to a disk geom(11)
nal advantage etry. In particular, radial-mode disk resonators have recently
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004 !
about due to been
10 000 of
at frequencies
and demonstrated
where
iswith
Bessels function
first kind of exceeding
order ,
ofAli
theM.40m- 1.5 GHz,
even whenfrequency,
operating inis air
wine-glass-mode
is the resonance
the [18].
disk radius,
and of, California,
, where
is now the effective stiffness of the disk. For a 3- mNiknejad
University
Berkeley
EECS 242B, Slide: 9
• Intrinsically better power handling capability from a
wine glass resonator.
• The input/output ports are isolated (actuation versus
sensing).
Sustaining Amplifier Design
IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
width has been reduced from 1.5 m
y loss from the disk to the substrate
us, maximize the device . Even
he measured
of 1.5 k for the
ine glass disk with
V and
than the 50 normally exhibited
nd thus, in an oscillator application
er capable of supporting higher tank
ons, the stiffness of this wine glass
N/m, which is 71.5 the
0-MHz wide-width CC-beam. Ac, and , (8) predicts a power
her for the wine glass disk. For the
d result in a 10-dB lower far-from-
• Use feedback amplifier to create positive feedback transFig. 8. Top-level circuit schematic of the micromechanical resonator
oscillator of this work. Here, the (wine glass disk) micromechanical resonator
is represented by its equivalent electrical circuit.
resistance
r circuit, a sustaining amplifier cirAutomatic
omparatively
large
motional resis- gain control is used so that the oscillation self•
esonators is needed. As mentioned
limits
the electronic non-linearity. This reduces
a previous oscillator
[21], athrough
transreith the resonator is a logical choice,
theandoscillator
amplitude but also helps to reduce 1/f noise
, respecput resistances
impose relatively
small loading on
up-conversion
of the system to be very
oaded
G
AMPLIFIER DESIGN
LIN et al.:sacrificing
SERIES-RESONANT
VHF
MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004 !
, without
power
transfer
mplifier
would need to have suffiAli M. Niknejad
University of California, Berkeley
EECS 242B, Slide: 10
Fig. 8. Top-level circuit schematic of the micromechanical resonator
oscillator of this work. Here, the (wine glass disk) micromechanical resonator
is represented by its equivalent electrical circuit.
Amplifier Details
DESIGN
aining amplifier cirarge motional resiseded. As mentioned
llator [21], a transreor is a logical choice,
and
, respecely small loading on
he system to be very
ficing power transfer
d need to have suffineed to provide a 0
circuit schematic of the single-stage sustaining transresistance
e the 0 phaseSingle-stage
shift Fig. 9. Detailed
amplifier
is used
to maximize
bandwidth.
amplifier
of
this
work,
implemented
by
a
fully
differential
amplifier
in a
sonance, per item 2)
one-sided
shunt-shunt
feedbackshift
configuration.
Recall
that
any
phase
through the amplifier
the above with min-
•
causes theand
oscillation
frequency
to
shift
(and
phase
provide resistances
and
and
of the oscillator cirnoise serve
to degrade)
as shunt-shunt feedback elements that allow control of
mechanical resonator
t (which in this case the transresistance gain via adjustment of their gate voltages.
Common-mode
feedback
used
to
set
output
voltage.
•
The
need
for
two
of
them
will
be
covered
later
in
Section
V
Fig. 6). As shown,
on ALC.
Feedback
resistance and Amplitude Level Control
used to best accomhe micromechanical
(ALC)
implemented
with
MOS
resistors
A.
Transfer
Function
particular sustaining
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004 !
vious two-stage cirAli M. Niknejad
one gain stage, but
Expressions for the dc transresistance gain, input resistance,
University of California, Berkeley
and output resistance, of the sustaining amplifier are as follows:
EECS 242B, Slide:
11
accomcy
is minimal. In particular,impedance
as detailed
in [31],
anloop.
balance
in
the
hanical
ase shift close
to 0 allows the micromechanical ress can impact the 3-dB bandtaining A. Transfer Function In addition, the use of larger
where
rate
at
the
point
of
highest
slope
in
its
phase
versus
where
represents
the
input-referred
current noise
width
of
the
transresistance
amplifier,
which
as
a
rule
should
be
age cirExpressions for the dc transresistance gain, input resistance,
urve,
which
it to more
effectively
oscillation
that its phase shift at
atofleast
10 the suppress
and allows
output resistance,
the
sustaining
amplifier arefrequency
as
follows:so amplifier,
ge, but
, and
is the
sustaining
thisphase
frequency
is minimal.
particular,voltage
as detailed
in source
[31], anof the differential op amp
rviations
oscil- caused by amplifier
deviations.
The In referred
noise
noise
the micromechanical resamplifier
close to 0byallows
fs the
transresistance amplifier
of Fig.phase
9 is ashift
function
(12)
cillator
onator to
operate
at the point of highest slope in its phase versus where
represents t
apacitance
in both the transistors
and
the micromef a fully
frequency
curve,
which
allows it to more effectively suppress sustaining amplifier,
nator,
and
is
best
specified
by
the
full
transfer
funct-shunt
(13) phase deviations. The
frequency deviations caused by amplifier
referred voltage noise sou
amplifier
e other.
erential
p of the
a total
g a low
t-shunt
transisntial op
edback
esistors
Design Equations
bandwidth of the transresistance amplifier of Fig. 9 is a function by
of parasitic capacitance in bothwhere
the transistors
and the microme(14)is 2/3 for long-channel devices, and from 2–3
chanical resonator, and is best specified by the full transfer funcfor short-channel devices. In (21), all common mode
tion for the amplifier
is the transconductance of
, (15)and sources
are theare nulled by the common-mode feedback
where
and
, respectively,
isInMOS
reoutput resistance of
addition,
flicker noise is neglected
osc
2/3 forthe
long-ch
where issince
and
, assumed
to be is beyond the flicker noise
sistor value implemented by
for short-channel
devices
frequency
corner, and (2)
rep
much smaller than the s, and the forms on the far rights asare nulled
an approximate expression
that accounts
for by th
(15) sources
(16) .only
(Note that
sume a large amplifier loop gain
flicker noise
and
white noise at large offsets.In(Ifaddition,
(2) attempted
to i
this is amplifier loop where
gain, not oscillator loop gain.) In
practice,
frequency
beyond need
the fl
noise, then transistor flicker
noiseiswould
an approximate exp
(16) only
These
equations
are
used
to
trade-off
between
power
included.)
oop transresistance gain of the base amplifier with
and white noise at large
(21)
noise from
this
sustaining
amplifier
impro
ding, where and noise in the oscillator. From
The
device
size
cannot
be
noise,
then transis
the size of the op amp input transistors
and/or their dra
included.)
is the
open loop
gain ofneeds
the base amplifier
with
too large
since
thetransresistance
bandwidth
to
bedesign
about
10X
rents increase—the
same
changes
needed
to decre
From
(21)
noise
from
feedback loading, where
bandwidth-based
the size
of the op amp in
the oscillation frequency. amplifier and , with the same
tions on input transistor
s. For
given resonator
rentsaincrease—the
same d
and
, wit
amplifier
sustaining
amplifier
oscillation frequency , the optimal
tions
on input transistor
that stillIEEE
meets
wireless
handset
for 2004
the! ref
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS,
JOURNAL
OF SOLID-STATE
CIRCUITS,specifications
VOL. 39, NO. 12, DECEMBER
(17) oscillator can be found by simultaneous
,t
oscillationsolution
frequencyof (2)
Ali M. Niknejad
University of California, Berkeley
EECS 242B, Slide: 12
•
that still meets wireless ha
Amplitude Control Loop
2486
IEEE J
• Precision peak-
detector used to
sense oscillation
amplitude. This is
done by putting a
MOS diode in the
feedback path of an
inverting op-amp
Fig. 11.
(b) win
tiny la
mariz
Fig. 10. (a) Top-level and (b) detailed circuit schematics of the ALC circuit.
this w
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004 ! Fig
power is applied. As the amplitude of oscillation grows and ricated
Ali M. Niknejad
University of California, Berkeley
EECS 242B, Slide: 13
’s channel resistance to below that
the ALC reduces
Measured Spectra and Time-Domain
Fig. 14. Extracted
from the peaks shown in Fig. 13 versus their
is also derived from
corresponding input power. The
the
curve and compared with
for a typical case to illustrate
graphical determination of the steady-state oscillation amplitude.
• These are the
measurements without
using the ALC • The oscillation self-limits
due to the resonator nonlinearity
• Notice the extremely small
oscillation amplitudes
• With the ALC, the
oscillation amplitude drops
to 10mV
Fig.
10-M
CCosci
Syst
CC
8.4
T
han
noi
the
CC
The
1
the
1
the
Fig. 15. Measured steady-state Fourier spectra and oscilloscope waveforms
1
for (a) the 10-MHz 8- m-wide CC-beam resonator oscillator; (b) the 10-MHz
(if
40- m-wide CC-beam resonator oscillator; and (c) the 60-MHz wine glass disk
resonator oscillator. All data in this figure are for the oscillators with ALC
T
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS,
IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004 !
disengaged.
not
Ali M. Niknejad
University of California, Berkeley
EECS 242B, Slide: 14
the
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS
2487
Experimental Results
TABLE II
RESONATOR DATA SUMMARY
TABLE III
OSCILLATOR DATA SUMMARY
Fig. 12. Photo of the sustaining transresistance amplifier IC fabricated in
TSMCs 0.35- m CMOS process.
• Performance close to
Fig. 13. Measured open-loop gain of the 10-MHz wide-width CC-beam
oscillator circuit under increasing input signal amplitudes. These curves were
taken via a network analyzer sweeping down in frequency (i.e., from higher to
lower frequency along the -axis).
of the three resonator designs summarized in Table I.
GSM specs. DC power each
Fig. 16 presents plots of phase-noise density versus offset from
carrier frequency for each oscillator, measured by directing
and area are compelling
the
the output signal of the oscillator into an HP E5500 Phase
Noise Measurement System.
quick comparison of the oscilloscope waveforms of
• The measured 1/f noise Fig.A 15(a)–(c),
which shows steady-state oscillation amplimuch larger than
tudes of 42 mV, 90 mV, and 200 mV, for the 8- m-wide
10-MHz CC-beam, the 40- m-wide 10-MHz CC-beam, and
expected
the 60-MHz wine glass disk, respectively, clearly verifies the
which point the loop gain of an oscillator would drop to 0 dB,
the oscillation amplitude would stop growing, and steady-state
oscillation would ensue. Although the plot of Fig. 13 seems
to imply that Duffing nonlinearity might be behind motional
resistance increases with amplitude, it is more likely that deor
with amplitude are more responsible
creases in
[21], since Duffing is a stiffness nonlinearity, and stiffness (like
inductance or capacitance) is a nondissipative property.
Oscillators with the ALC loop of Fig. 10 disengaged were
tested first. Fig. 15 presents spectrum analyzer plots and oscilloscope waveforms for oscillators with ALC disengaged using
utility of wide-CC-beam design and the superiority of the
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004 !
Ali M. Niknejad
University of California, Berkeley
EECS 242B, Slide:
15
Department of Electrical Engineering and Computer Science
University of Michigan, Ann Arbor, Michigan 48109-2122, USA
EL: 734-764-5411, FAX: 734-647-1781, email: ywlin@umich.edu
Array-Composite MEMS Wine-Glass Osc
ACT
by 13 dB has been obtained
ce-micromachined micromereplacing the single resonator
with a mechanically-coupled
the power handling ability of
Specifically, a mechanicallywine-glass disk resonators emoop with a custom-designed,
staining amplifier achieves a
kHz offset and -136 dBc/Hz
n divided down to 10 MHz,
-138 dBc/Hz at 1 kHz offset
rier offset, which represent 13
r recently published work on
or oscillators, and also now
requirements by 8 dB and 1
Support
Beam
Anchor
Coupling
Beam
Output
Electrode
io
WGDisk
WGDisk
vo
WGDisk
RL
vi
Input
Electrode
VP
Rx Lx Cx io
z
!
r
vi
Co
Co
vo
RL
Fig. 1: Perspective-view schematic of a multi (three) wine-glass disk micromechanical resonator array. The electrical equivalent circuit for the resonator
is shown to the bottom right.
• Increase power handling capability by coupling
multiple (N) resonators
together.
1 Mode
UCTION
Amplitude
This
increases
power
handling
capability by N.
•
in a wireless communication
st
Voltage Supply
# 1.65 V
)
in the reference oscillator is
2nd Mode
niaturize, since
Q’s
>
10,000
Y.-W. Lin, S.-S. Li, Z. Ren, and C. T.-C. Nguyen, “Low phase noise array-composite micromechanical wine-glass disk oscillator,” Technical
n 35 ppm uncompensated
over
Digest, IEEE Int.
Electron Devices Mtg., Washington, DC, Dec. 5-7, 2005, pp. 287-290.
e on-chip. Recently, however,
nical resonators basedTable
on 1. Oscillator Data Summary
9 Res.
5 Res.
3 Res.
3rd Mode
increasingly attractive as on- Oscillator Design Summary
Q = 118,900
Q = 119,500
Q = 122,500
-30
nts for communication-grade
Process
TSMC 0.35 "m CMOS
Freq.
by
demonstrations of Q’s >
-40
Ali M. Niknejad
University of California, Berkeley
EECS 242B, Slide: 16
1 Res.
n $ 105 "m $ 105 "m
Y.-W. Lin, S.-S. Li, Z. Ren, and C. T.-C. Nguyen, “Low phase noise array-composite
micromechanical wine-glass
disk oscillator,” Technical
3 WGDisk
1 WGDisk
Digest, IEEE Int. Electron Devices Mtg., Washington, DC, Dec. 5-7, 2005, pp. 287-290.
Design Summary
Table
Data “Low
Summary
Y.-W. Lin, S.-S. Li, Z. Ren,
and1.C.Oscillator
T.-C. Nguyen,
phase noise array-composite micromechanical
disk oscillator,”
Technical
5 WGDisk
9 Res. wine-glass
5 Res.
3 Res.
Digest, IEEE Int. Electron Devices
Mtg., Washington, DC, Dec. 5-7, 2005, pp. 287-290. Q = 118,900
Q = 119,500
Q = 122,500
Oscillator Design Summary
-30
9 WGDisk
-40
Transmission (dB)
9 Res.
-50 Q = 118,900
-30
Zoom-in View
Transmission (dB)
Process
TSMC 0.35 "m CMOS
Table 1. Oscillator
Data Summary
Voltage Supply
# 1.65 V
Integrated
Cons.
350 "W
OscillatorPower
Design
Summary
Circuit
Amplifier Gain
8 k!
ProcessAmplifier BWTSMC 0.35 "m
CMOS
200 MHz
Voltage Supply
# 1.65
V $ 50 "m
Layout Area
50 "m
Integrated
Power Cons.
350
"W
Polysilicon-Based
Process
Surface
Circuit
Amplifier Gain
8 k!Micromachining
Radius, R
32 "m
Amplifier BW
200 MHz
MEMS
Thickness, h
"m
Layout Area
50 "m $ 503"m
Wine-Glass
Gap, do
80 nm
Polysilicon-Based
Disk Process
Voltage Supply
10 V
Resonator
Surface Micromachining
ArrayRadius, RPower Cons.
32 "m ~ 0 W
Motional
5.75 k!, 3.11 k!, 1.98 k!,
MEMS
Thickness,Resistance,
h
3 "m
Rx
1.25
k! for n = 1, 3, 5, 9
Wine-Glass
Gap, do Layout Area
n80
$ nm
105 "m $ 105 "m
-60
-40
-70
-80
-50
Support Beams
Transmission (dB)
Layout Area
5 Res.
3 Res.
1 Res.
Q = 119,500 Q =Q161,000
= 122,500
Input
Wine-Glass
Electrode
Disk 1 Res.
Q
= 161,000
Data
R = 32 "m
h = 3 "m
do = 80 nm
VP = 7 V
Fig. 7: M
the desire
tion and h
Transmission (dB)
Transmission (dB)
nators i
somewh
R=32"m
-100
-70
here is
-110
order to
Data
-80
(c.f., Fig
61.73
61.78
61.83
61.88
61.93
R = 32 "m
points,
-90
Frequency (MHz)
Outputh = 3 "m
Anchor
Coupling Beam
Electrode
removed
Fig. 6: Measured frequency characteristic for a fabricated
wine-glass
disk
do = 80 nm
-100
resonator-array.
erwise h
V
P = 7
Fig. 5: SEM’s of fabricated wine-glass disk resonator-arraysVwith
varying
-110-40
contribu
numbers
of mechanically-coupled wine-glass disks.
Disk
factor b
5-Res.
61.73
61.78Array 61.83
61.88
61.93
-45
Voltage
Supply
10
V
Resonator 1 WGDisk
detailed
No Spurious
VP = 7Frequency
V
3 WGDisk
(MHz)
RESULTS
-50 IV. EXPERIMENTAL
Power Cons.
~0W
Array
each ele
Modes
Fig. 6: Measured frequency characteristic for a fabricated wine-glass disk
Motional
5.75 k!, 3.11 k!, 1.98 k!,
Wine-glass
disk
array
resonators
were
fabricated
via
a
-55
1.84, 2.
resonator-array.
Selected
Resistance,
1.25 k! for n = 1, 3, 5, 9
three-polysilicon
self-aligned
stem process used previously to
spective
-60
5 WGDiskRx
Mode
achieve
-40disk resonators [9]. Fig. 5 presents SEM’s of fabriNote
Layout Area
n $ 105 "m $ 105 "m
-65
cated 60-MHz wine-glass
disk arrays with varying numbers of
the abo
9 WGDisk
5-Res. Array
-45
-70
coupled resonators,
supported by only
support beams.
fere wit
Notwo
Spurious
VPeach
=7V
3 WGDisk
1 WGDisk
52 measured
57 frequency
62 spectra
67for a stand-alone
Fig. 6-50
presents
resonato
Modes 72
wine-glass
together (MHz)
with resonator arrays using
Frequency
which w
-55 disk resonator
Zoom-in View
Selected
3,
9 resonators
coupled
withmodes
one another.
but at th
Input
Wine-Glass
Fig.5,7: and
Measured
frequency mechanically
spectrum verifying
no spurious
around
-60
5 WGDisk Support Beams
Electrode
Disk
Mode
Although
theofsingle
resonator
achieves
the electrode
highestexcitaQ of
To a
the desired mode
the resonator
array, achieved
via proper
tion and half-wavelength
coupling
beamall
design.
161,000,
the
array
Q’s
are
still
greater
than
115,000.
chanica
-65
9 WGDisk
From
the
peak
heights,
R
(with
V
=
7
V)
can
be
extracted
the freq
x
P
nators-70
in the array). Although
differences
in Q contribute
wide fre
to be 11.73to k!,
6.34 k!,
4.04 k!, and
2.56the
k!,
for culprit
1, 3, 5,
somewhat
the lower
multiplication
factor,
main
R=32"m
57respectively.
62 The
67resonators
72
respond
and 9is resonator
arrays,
measured
Rx reduchere
the52
need to
split
the electrodes
between
in
the utili
tion factors
ofcoupling
1.85, 2.90,
and located
4.58,(MHz)
actually
shortpoints
of the
Frequency
order
to avoid
beams
at high fall
velocity
Zoom-in View
trode pl
expected
and 9,
(i.e., attach
the number
ofvelocity
the resoFig. 3,
1).5,Since
therespectively
coupling
at high
Input
Wine-Glass
Fig.(c.f.,
7: Measured
frequency
spectrum beams
verifying
no spurious
modes around
Support
the
electrodes
between
resonators
must
be electrode
split and
Electrode
DiskOutput
Y.-W. Lin, S.-S. Li,
Z. Ren,Beams
and C. T.-C.
phase noise array-composite
micromechanical
wine-glass
oscillator,”
Technical
the points,
desired mode
of the resonator
array,
achieved disk
via
proper
excitaAnchor“Low
Coupling
BeamNguyen,
Electrode
removed
at
high
velocity
points
where
the
current
would
othhalf-wavelength coupling beam design.
Digest, IEEE Int. Electron Devices Mtg., Washington, DC, Dec. 5-7, 2005,tion
pp.and287-290.
erwise
have been the largest. This greatly reduces the current
Fig. 5: SEM’s of fabricated wine-glass disk resonator-arrays with varying
contribution
suchAlthough
inner electrodes,
thereby in
reducing
the
nators
in the from
array).
differences
Q contribute
numbers
mechanically-coupled
disks.
Table
1.ofOscillator
Datawine-glass
Summary
factor bytowhich
the
motional
resistance
is lowered.
A more
somewhat
the lower
multiplication
factor,
theEECS
main
Ali M. Niknejad
University of California, Berkeley
242B,
Slide: 17
9 Res.
5 Res.
3culprit
Res.
R=32"m
-90
-60
• Prototype resonator implemented in a 0.35μm CMOS
process shows no spurious modes
• Area is still quite resonable compared to a bulky XTAL
Measured Phase Noise
Fig. 8: Measured steady-state oscilloscope waveform for the 60-MHz wineglass disk resonator-array oscillator.
Fig. 8: Measured steady-state oscilloscope waveform for the 60-MHz wineFig. 8:
Measured
steady-state
oscilloscope waveform for the 60-MHz wineglass
disk
resonator-array
oscillator.
0
glass disk resonator-array oscillator.
0 -10
0
Power
(dB)
Power
(dB)
Power (dB)
-10 -20
-10-30
-20
-20-40
-30
-30-50
-40
-60
-40
-50
-70
-60
-50
-80
-70
-60
-90
-80
-70 61.5
61.7
61.9
-90
-80
Frequency (MHz)
61.5
61.7
61.9
Fig. 9: Measured
steady-state Fourier spectrum for the 60-MHz wine-glass
-90
Frequency (MHz)
disk resonator-array oscillator.
-20
-20
-40
-40
-60
-60
-80
-80
-100
Phase Noise (dBc/Hz)
230 mV
230
230
mVmV
Phase
Noise
(dBc/Hz)
Phase
Noise
(dBc/Hz)
Y.-W. Lin, S.-S. Li, Z. Ren, and C. T.-C. Nguyen, “Low phase noise array-composite micromechanical wine-glass disk oscillator,” Technical
Y.-W.
Lin, S.-S. Li, Z. Ren, and C. T.-C. Nguyen, “Low phase noise array-composite micromechanical wine-glass disk oscillator,” Technical
Y.-W.
Lin, S.-S.
Ren, and
C. T.-C.
Nguyen,
“Low phase
noise
array-composite
micromechanical wine-glass disk oscillator,” Technical
Digest,
IEEE Li,
Int.Z.
Electron
Devices
Mtg.,
Washington,
DC, Dec.
5-7,
2005, pp. 287-290.
Digest,
IEEE
Int.
Electron
Devices
Mtg.,
Washington,
DC,
Dec.
5-7,
2005,
pp.
287-290.
Digest, IEEE Int. Electron Devices Mtg., Washington, DC, Dec. 5-7, 2005, pp. 287-290.
-20
Single
Resonator
Single Single
Resonator
Resonator
9-Resonator
Array 9-Resonator
9-Resonator
3
1/f Noise
Array
Array
3
3
1/f Noise
1/f NoiseFrequency
Divided Down
Frequency
to
10 MHz Frequency
Divided Down
Divided Down
to 10 MHz
-40
-60
-80
-100
-120 -100
-120
-140 -120
-140
-160
-140
-1601.E+01
-160
1.E+01
to 10 MHz
1/f 2 Noise
2
1/f Noise
1.E+02
1.E+03
1.E+04
1/f 2 Noise
Offset Frequency
1.E+02
1.E+03 (Hz)
1.E+04
1.E+05
1.E+05
1.E+01
1.E+02
1.E+03
1.E+04 1.E+05
Fig. 10: Phase noise
densityOffset
versus
carrier
offset
frequency
Frequency
(Hz) plots for the 60MHz wine-glass disk resonator-array oscillator, measured using an HP
Offset
Frequency
(Hz)for
Fig.
10: Phase
Phase Noise
noise density
versusSystem.
carrier
offset
frequency
plots
thethe
60E5500
Measurement
The two
star symbols
show
MHz
disk
resonator-array
oscillator,
using anplots
HP for the 60GSM wine-glass
specification
for close-to-carrier
far-from-carrier
offsets.
Fig. 10: Phase
noise
density and
versus
carriermeasured
offset
frequency
E5500 MHz
Phase wine-glass
Noise Measurement
System.
The
two
star
symbols
show
disk resonator-array oscillator, measured the
using an HP
GSM
specification
for
close-to-carrier
and
far-from-carrier
offsets.
circuitE5500
and MEMS
device
onto a single
silicon
chip,
the show the
Phase Noise
Measurement
System.
The
twomakes
star symbols
micromechanical
resonator-array
oscillator
of this workoffsets.
an
GSM specification
for close-to-carrier
and far-from-carrier
circuit
and
MEMS
device
onto
a
single
silicon
chip,
makes
the
attractive on-chip replacement for quartz crystal reference
micromechanical
resonator-array
oscillator
of
this
circuitinand
MEMS
deviceapplications.
onto
a single
oscillators
communications
Andsilicon
all work
ofchip,
thisanmakes the
attractive
on-chip
replacement
for quartz
crystal reference
mademicromechanical
possible
by effectively
harnessing
the oscillator
integration
advanresonator-array
of this work an
oscillators
in
communications
applications.
And
all
of the
this reference
tage of
micromechanics,
allows a designer
to break
attractive
on-chipwhich
replacement
for quartz
crystal
made
possibleparadigm
by effectively
harnessing
advan“minimalist”
that dictates
the the
use integration
of one andAnd
only all of this
oscillators
in communications
applications.
61.5
61.7
61.9
tage
of
micromechanics,
which
allows
a
designer
to
break
the
one quartz
crystal
in an
oscillator,
andharnessing
instead, permits
the use
Fig. 9: Measured steady-state Fourier spectrum for the 60-MHz wine-glass
made
possible
by
effectively
the
integration
Frequency
(MHz)
For oscillator
testing,
the IC and
MEMS chips were inter“minimalist”
paradigm that dictates
the asuse
of onewith
andlittle
only advandisk resonator-array
oscillator.
of as many micromechanical
resonators
needed,
tage ofpenalty.
micromechanics,
allowspermits
a designer
to break the
viasteady-state
wire-bonding,
and
testing for
wasthedone
underwine-glass
vacFig.connected
9: Measured
Fourier
spectrum
60-MHz
one
in an oscillator,which
and instead,
the use
sizequartz
or costcrystal
paradigmresonators
that dictates
the use
of little
one and only
oscillator
testing,
theQIC
MEMS chips were
interdiskFor
resonator-array
oscillator.
uum
to preserve
the high
of and
the micromechanical
resonators
of as “minimalist”
many micromechanical
as needed,
with
Acknowledgments.
This in
work
supported
DARPA
connected
viaFigs.
wire-bonding,
testingperformance
was done under
crystal
an was
oscillator,
andunder
instead,
permits the use
or arrays.
8-10 presentand
oscillator
data, vacstartsize orone
costquartz
penalty.
Grant
No.
F30602-01-1-0573.
For
oscillator
testing,
ICmicromechanical
and MEMS
chips
were interuuming
to with
preserve
high Q the
of the
resonators
the the
obligatory
oscilloscope
and spectrum
analyzer
of as many micromechanical resonators as needed, with little
Acknowledgments.
This
work was supported under DARPA
Y.-W.
Lin,
S.-S.
Li, Z. Ren,
and
C.
T.-C.
Nguyen,
“Low
phase
micromechanical
connected
via
wire-bonding,
and
testing
was
done
under
vac-noise array-composite
waveforms,
and
culminating
in
a plot
of phase
noise
density
or
arrays.
Figs.
8-10
present
oscillator
performance
data,
startREFERENCESwine-glass disk oscillator,” Technical
size
or
cost
penalty.
No. F30602-01-1-0573.
IEEE
Int.high
Electron
Mtg.,
Washington,
DC, Dec.Grant
5-7, 2005,
pp. 287-290.
versus
offset
from
the
carrier
frequency.
The
lastanalyzer
ofresonators
these
ing
with
the
obligatory
oscilloscope
and
spectrum
uum
toDigest,
preserve
the
Q ofDevices
the
micromechanical
[1] Y.-W.
Lin, S. Lee, S.-S. Li, Y. This
Xie, Z. work
Ren, andwas
C. T.-C.
Nguyen, “SeriesAcknowledgments.
supported
under DARPA
shows a Figs.
phase
noisepresent
of -123inoscillator
dBc/Hz
at performance
1phase
kHz offset
waveforms,
and culminating
a plot of
noise from
density
or arrays.
8-10
data,thestartREFERENCES
resonant VHF micromechanical
resonator reference oscillators,” IEEE J.
Table
1.atOscillator
Summary
Grant No.
F30602-01-1-0573.
and
-136
dBc/Hz
far-from-carrier
farversus
offset
the carrier
frequency.Data
Theoffsets.
lastUniversity
ofThis
these
Solid-State
Circuits,
vol. 39, no.912,
pp. 2477-2491, Dec.
2004.
ingcarrier,
with
the from
obligatory
oscilloscope
and
spectrum
analyzer
Res.
5 Res.
Ali M. Niknejad
of California,
Berkeley
EECS 242B,
Slide: 18
3 Res.
[1]
Y.-W.
Lin,
S.
Lee,
S.-S.
Li,
Y.
Xie,
Z.
Ren,
and
C.
T.-C.
Nguyen, “Seriesfrom-carrier
noise of
floor
is dBc/Hz
about 4 at
dB1 better
than that
[2] W.-T. Hsu and C. T.-C. Nguyen, “Stiffness-compensated temperatureshows
a phase noise
-123
kHz offset
fromofthean
• Meets GSM specs with comfortable margin
F ω≈ ηu
spring constant. We also define the natural frequency
= ,
e 0
ac Fe
!
(1)
is:
2. Mechanical
for the
resonator. Fig. 3. The electrical equivalent circuit for MEMS-based oscillator.
nical
lumpedlumped
modelmodel
for the
resonator.
and
the quality
Q=
ω
The
resonator
0 m/γ.
The
observation
xfactor
= H(ω)F
(2) is that, to
Fig.k/m
3. The
electrical
equivalent
circuit
for
MEMS-based
oscillator.
e ,important
Fig. 1. Schematic representation of noise aliasing in micro-oscillator.
where
the
displacement
xlarge
is assume
k −1
displacement
x
due
to
the
force
F
is
given
by:
motional
resistance
R
,
a
electrom
e
m
where
C0 is the capacitance
at zero displacement.
In (6),
H(ω)
.
(3)
A linear resonator would filter
out the=
amplifier low-frequency 1/f where
the
displacement
x
2 /ω 2 where
the
force-displacement
transfer
function
H(ω)
from
pared
to
the
gap
d.
By
substituting
(8
1
−
ω
+
iω/Qω
duction
factor
is
needed
requiring
either
noise
present
at
the
resonator
input,
but
nonlinear
filtering
element
the
0 first term is due to the capacitance variations (mo0
ere
m
is
the
lumped
mass,
γ
is
the
damping
coefficient,
frinoise
aliasing
in
micro-oscillator.
in noise
et will
al.: result
analysis
of aliasing.
phase noise and micromechanical
the
second
the
normal
AC(1) oscillators
is: tional current im ),xand
=cal
H(ω)F
, isto
(2)
pared
the
gap
By
sub
a equivalent
large
DC-bias
voltage
U2323
. In
practice,
eterm
circuit
shown
in
Fig.
3
dcd.
where
C
is
the
capacitance
at
zero
displacement.
In
(6),
0
the
lumped
mass,
γ
is
the
damping
coefficient,
is
the
electrostatic
forcing
term,
and
k
is
the
mechanical
t the amplifier
low-frequency
1/factuating
current is:
through the capacitance. The electromechanical
The electrostatic
force
the resonator
Thea
ally
is
limited
by
system
considerations
−1
transduction
factor
iscomponent
identified
as equivalent
[12]:values are:
ut,
but
nonlinear
filtering
element
cal
circuit
showU
the
first
term
is
due
to
the
capacitance
variations
(mok
ing
constant.
We
also
define
the
natural
frequency
ω
=
0
motion
where
the
force-displacement
transfer
function
H(ω)
from
ctrostatic forcing term,1 ∂C
and k is the
mechanical
gap,
typically
less
than
1
µm,
is
needed.
H(ω) =
.
(3)
2
2 + iω/Qω
2
√
∂C
C
tional
current
i
),
and
the
second
term
is
the
normal
ACFe = Q = (U
+
u
)
,
(4)
0
1
−
ω
/ω
/m and the quality factor
ω
m/γ.
The
resonator
duction
m
0 following
(1)
0dc is: ac
will
be
seen
in
the
sections,
the
0 Udc
component
values
are:
2
η
=
U
≈
.
(7)
dc
2 ∂x
ant.
We
also
define
the
natural
frequency
ω
=
R
=
km/Qη
=
k/ω
∂x
d
0capacitance.
m
large
T
through
the
The
electromechanical
placement x due to the force Fe current
is given by:
sult in unwanted
nonlinear effects athat
lim
The
electrostatic
force
actuating
the
resonator
is:
−1
2
The
resulting
relation
between
motional
currentnoise
im , aliasing.
√
where Ufactor
(DC)-bias
voltage
over
the
k the
allymot
is l
dc is the direct
the quality
Q =current
ω0transduction
m/γ.
The
resonator
amplitude
andCcause
=
η
/k,
factor
is
identified
as
[12]:
m
H(ω)
=
.
(3)
the mechanical
transducer
velocity
ẋ, theequivalent
excitation voltFig.
3. The
electrical
circuit
for MEMS-b
gap, uac is thexalternating
current
(AC)-excitation
voltage,
2
2
gap,
ty
R
=
km/
=
H(ω)F
,
(2)
1
∂C
m
1
−
ω
/ω
+
iω/Qω
duct
e
2
0
age
u
,
and
the
force
F
at
the
excitation
frequency
are:
2
ac
e
0
nt x dueand:to the force Fe is given by:
Fe =
(Udc
+ uac ) ,L
,(4)
andwill
m = m/η Spring
be
B.
Nonlinear
Electrostatic
Force
2 ∂xi∂C
a
la
C
0
2
≈
η
ẋ,
m
1.
Schematic
representation
of
noise
aliasing
in
micro-oscillator.
sult
in
electrostatic
force
actuating
C
=
η
/k,
η=U
≈the
Udcresonator
. 0 = ϵis:
(7)
ere the force-displacement transferThe
H(ω) from
dc
(8)
m
C
A
/d
.
Afunction
0
el
0
el
ally
where
is(DC)-bias
capacitance
at zero
displace
FC
,
0 ηu
∂x
d
near resonator
would
filter
out
the
amplifier
low-frequency
- direct
e ≈
acthe
where
U
the
current
voltage
over
the
C
=
ϵ
,
(5)
dc is 1/f
0
amplitu
Fig.
2.
Mechanical
lumped
model
for
the
resonator.
Due
to
the
inverse
relationship
betwe
x
=
H(ω)F
,
(2)
is:
d
−
x
e
gap,
2
present at the resonator input, but nonlinear
filtering
element
the
first
term
is
due
to
the
capacitance
va
1 ∂C
gap,
uFig.
is
thethe
alternating
current
(AC)-excitation
voltage,
2
ac where
3. The
electrical
equivalent
circuit
for
MEMS-based
oscillator.
displacement
x
is
assumed
to
be
small
comLcurrent
m/η
displacement
and
the
parallel
plate
capa
m =
The
important
observation
is
tha
F
=
(U
+
u
)
,
(4)
e
dc
ac
The
resulting
relation
between
the
motional
i
,
result in noise
aliasing.
will
m
tional
current
i
),
and
the
second
term
is
ths
pared
to
the
gap
d.
By
substituting
(8)
into
(1),
an
electriand:
is isthe
capacitance
that depends on 2
the∂x trostatic m
−1
where m
the transducer
lumped mass, working
γ is thekdamping
coefficient,
B. Non
coupling
introduces
nonlinear
RThe
, a=
large
elect
calH(ω)
equivalent
circuit
shown
in Fig. 3resistance
can
bethe
derived.
mC
hematic
in
micro-oscillator.
sult
the
mechanical
velocity
ẋ,
excitation
voltFe isrepresentation
the
electrostatic
forcing
term,
and
k isϵ0the
mechanical
orce-displacement
transfer
from
permittivity
of aliasing
free
space
, function
the
electrode
areatransducer
Ael
,current
andmotional
through
the
capacitance.
The
elect
ϵ
A
/
H(ω)of=noise
.
(3)
ditionally,
nonlinear
effects
of
mechanica
0
0
el
A
2
component
values
are:
where
C
is
the
capacitance
at
zero
displacement.
In
(6),
2
el
0
resonator
would
filter
out
the
amplifier
low-frequency
1/f
spring constant.
We alsoelectrode
natural
frequency
ω00U
=dc through
where
is the
direct
current
(DC)-bias
over
the
1define
− ωthe/ω
+
iω/Qω
duction
factor
isvoltage
needed
requiring
eitn
!
C
=
ϵ
,
(5)
amp
the
nominal
gap
d.
The
current
the
elec0
0
transduction
factor
is
identified
as
[12]:
age
u
,
and
the
force
F
at
the
excitation
frequency
are:
sible,
and
most
fundamentally
material
Due
ac
e
sent at the
input, but
nonlinear
element
the first term is due√to the
capacitance
variations (mok/mresonator
and the quality
factor
Q = ω0filtering
m/γ. The
resonator
d
2− x
2
gap,
u
is
the
alternating
current
(AC)-excitation
voltage,
R
=
km/Qη
=
k/ω
Qη
,
a large
DC-bias
Udc . Indisplac
pract
trodexis:
actional current i ),
m
0for thevoltage
t in noise
aliasing.
the
limit
[4]
[13
displacement
due to the force Fe is given by:
second
term
is theminiaturization
normal ACm and the
e electrostatic force actuating theand:
resonator
is:
2
The
important
observa
Cmthe
= ηcapacitance.
/k,
∂C
Ctrostat
is
the
transducer
working
capacitance
that
depends
on
the
ally
is
limited
by
system
consideration
0 and
current
through
The
electromechanical
however,
the
gap
is
assumed
small,
t
B. N
i
≈
η
ẋ,
∂CU
∂C
∂u
(9)
m
ac
x = H(ω)Fe−1
,
(2)
η
=
U
≈
U
.
2
dc
dc
isig = k
≈
Udc
+ Ctransduction
, of free
(6)
Lm
=ism/η
factor
identified
as
[12]: less
permittivity
space
ϵpacitive
the
electrode
area
Ael1, µm,
and is
0
(8)
0, , and
nonlinearity
dominates.
Thus,
aa
l
∂x
d
gap,
typically
than
neede
ditiona
motional
resistance
R
,
m
1
∂C
∂t
∂t
∂t
A
el
2
≈
where the =
force-displacement
transfer
function
H(ω)
from
H(ω)
.
(3)
C0C
=
ϵF
/d
ed.
ac,,
0A
el
0 .ηucurrent
the
nominal
electrode
gap
The
through
the elec-sections,
=
ϵ
(5) sible, D
F
=
(U
+
u
)
,
(4)
0
at
e
dc
ac
2
2
will
be
seen
in
the
following
for the
resonator.
∂C
C
(1) is:
0
d
−
x
1 − ω2 ∂x
/ω0 + iω/Qω
duction
factor
is(7)needed
r
The
between
the motion
0 is: The importantη observation
= Udcresulting
≈
U
. obtain
trode
dc relation
the
lim
is
that,
to
a
small
disp
∂x
d
sult
in
unwanted
nonlinear
effects
tha
k −1
the
mechanical
transducer
velocity
ẋ,
the
ex
where
the
displacement
x
is
assumed
to
be
small
commotional
resistance
R
,
a
large
electromechanical
transm
a
large
DC-bias
voltage
U
howeve
H(ω)
=
.
(3)
is
the
transducer
working
capacitance
that
depends
on
the
∂CU
∂C
∂ucause
ere Udc is the direct
(DC)-bias
voltage
over
the
ac gap
trosfr
amplitude
and
aliasing.
1 −current
ω 2 /ω02 + iω/Qω
duction
factor
is
needed
requiring
either
a small
dnoise
or
The
resulting
relation
between
the
motional
current
i
,
0
m
i
=
≈
U
+
C
,
(6)
age
u
,
and
the
force
F
at
the
excitation
sig
dc electrode
0
pared
to the
gap
d. By
substituting
(8)
into
electriac
e (1),Aan
static
force
actuating
the
resonator
is:
permittivity
of
free
space
ϵ
,
the
area
,
and pacitive
a
large
DC-bias
voltage
U
.
In
practice,
the
voltage
usuγuis
the
damping
coefficient,
0
el
∂t
∂t
∂t
p,
is
the
alternating
current
(AC)-excitation
voltage,
dc
ditio
the
mechanical
transducer
velocity
ẋ,
the
excitation
voltally
is
limited
by
system
c
ac
The electrostatic force actuating the resonator is:
Phase Noise: Model for Resonator
• The system is non-linear due to the electrostatic
mechanism andcalthe
mechanical
non-linearities
ally
is
limited
by
system
considerations
thus,be
a small
equivalent circuit shown
in Fig. 3and,can
derived. The
the nominal
gap Fd.e at
The
age uacelectrode
, and the force
the current
excitationthrough
frequencythe
are:elec- sible
term, and k is the 1mechanical
d:
i
≈
η
ẋ,
B.
Nonlinear
Electrostatic
Spring
For
gap,
typically
less
than
1
µm,
is
needed.
Unfortunately,
as
m
∂Cal.: analysis of
gap,
typically
less
than
1µ
2 phase noise and micromechanical oscillators: ieee
kaajakari
et
transactions
on
ultrasonics,
1
∂C
component
values
are:
F
=
(U
+
u
)
,
(4)
trode
is:
e
dc
ac
2
will
be
seen
in
the
following
sections,
the
small
gap
will
rethe
ne the natural
frequency
=u control,
2 ∂x and ω
0+
i
≈
η
ẋ,
ferroelectrics,
frequency
vol.
52,
no.
12,
december
2005
m
F
≈
ηu
,
F
=
(U
)
,
(4)
A
ein the
ac followin
el ac
sult in unwanted nonlinear effects
that
limit
the vibration
e lumped model dc
will
be
seen
(8)
2.
Mechanical
for
the
resonator.
how
√
C
=
ϵ
,
(5)
r Q where
= ωU0dcm/γ.
The
resonator
is the
direct
current
(DC)-bias
voltage over the amplitude and
0
∂CU
2
∂x
F∂C
≈
ηu
, the ∂u
cause noise
aliasing.
ac2
to
inverse
relationship
be
eDue
ac
2
d
−
x
echanical
lumped
model
for
the
resonator.
i
=
≈
U
+
C
,
(6)
RmBerkeley
= where
km/Qη
= k/ω
uac is the alternating current (AC)-excitation voltage,
sig
dc
Ali M.gap,
University of California,
EECS 242B, Slide:paci
0 Qη ,x is assumed
in 0unwanted
nonlinea
the
displacement
to19b
rce
FNiknejad
is given by:
∂t
∂tsult
∂t
24
2 frequency control, vol. 52, no. 12, dec
ieee transactions on ultrasonics, ferroelectrics, and
dc
U
∂C .
dc
carrier
F
=
(10) signa
The nonlinear electrostatic spring constants are ob-
Fshown
=
. dominate [1]. (10)
second-order
correction
k
can
be
to
2
∂x
2e
2
∂x
tained
expansion
of the
electrostatic
force:
side-bands at
odel is used,
andby
thea series
accurate
nonlinear
model
is
used
The electrostatic
nonlinearity
limits
thesecond
resonator
drive
Including
terms
up
to
the
second
order
gives
for the
Including
terms
up
to
the
order
gives
for
the
2
in
the resona
the electromechanical transductionU[14].
∂C
dc
electrostatic
spring:
level as at
high-vibration
amplitudes;
the amplitudeF =electrostatic
.
(10)
spring:
The nonlinear electrostatic spring
constants
are
obcarrier side-b
2 ∂x
frequency
is not force:
akesingle
ned by a series expansion
of thecurve
electrostatic
(x) = k0evalued
(1 + k1e xfunction
+ k2e x22) and oscillaFig. 4. aliasi
Schema
The
Including
terms
up
to
the
second
order
gives
for
the
= k0e (1 [1]
+
+ k2e x ) the maxke (x)chaotic
1e x Therefore,
2 k[4].
noise unFig.
(∆ω)4p
tions may
even
become
U
C
3
2
0
DC
2
to
t
electrostatic spring:
due to
ω0 ± ∆ω
k0e = −2
, k1e =
, and k2e = 2 . (11)mental
Udc ∂C
noise
u
2
UDC C
3
imum
estimated
from
d 0 can be 2d
d 2
F = usable
. vibration amplitude
(10)
ω0 ± ∆
, k1e =
, and k2e = 2 . low-frequenc
2(1 +
∂xk x + k x2 )k0e = −
(11)
2
=
k
ke (x)
0e
1e
2e The
d beforespring
2d
the largest
vibration
amplitude
aFig.
bifurcation.
This
representation
linear electrostatic
k4.0e Schematic
is negative,
andd thus of noise aliasi
the
low-frequ
the
thermal
2second order
noise
u
(∆ω)
present
at
filter
input
is
aliased to
Including terms upcritical
to the
gives
for
the
n
lowers
the
resonance
frequency.
Of
the
nonlinear
terms,
the
UDC
C0
3
2 be written as [4], [15]:
vibration
amplitude
can
carrier signal
linear
spring
is negative,
thus
±k
∆ω
to
mixing
inand
resonator.
ω0 be
k0e = −
, k1e The
= second-order
, and kelectrostatic
= 2 . (11)
0e due
2e correction
sources
prese
k
can
shown
to
dominate
[1].
ctrostatic spring:
2
2e
the
lo
The second-order
correction
d
2d
d in the spring constant
side-bands
at
lowers the
frequency.
the the
nonlinear
the eleme
Theresonance
electrostatic
nonlinearityOf
limits
resonatorterms,
drive
taining
2
in the carrie
resona
springlevel
k0exisas
negative,
and
thus
at
high-vibration
amplitudes;
the
amplitude+ k1eelectrostatic
x + k2e x2 ) second-order
ke (x) = kThe
dominates
correction
k
can
be
shown
to
dominate
[1].
0e (1linear
4.
representation
noisecarrier
aliasing.
Lo
, Schematic
(12)
c = ! √ Fig. 2e
the low-frequency
noiseofsignal
at
∆ω
mu
side-b
may
have
a
s
side-b
lowers 2the resonance frequency.
Offrequency
the
nonlinear
curve terms,
isnonlinearity
not
athe
single
valued
function
andinput
oscillanoise
u
(∆ω)
present
at
filter
is
aliased
to
carrie
n
The
electrostatic
limits
the
resonator
drive
UDC C0
3
2
The aliasin
carrier signal at ω0 results in additional
3
3Q|κ|
in
the
tions
may
even
become
chaotic
[1]
[4].
Therefore,
the
maxsecond-order
k,non-linearity
cankbe
shown
to (11)
dominate
[1].
biasing
also
∆ω due
to mixing
in resonator.
ω0 ±
k0e =
−Electrostatic
, correction
k1e =
=
.
2eand
2e
limits
the
drive
level
at
high
2
2
mental
to
level imum
as at
high-vibration
amplitudes;
amplitudeAs illustrated in Fit
side-bands
atestimated
ωthe
0 ±∆ω.
d
2d
d
usable
vibration
amplitude
can
be
from
The electrostatic nonlinearity limits the resonator drive
carrie
with
a
charg
low-frequenc
in
the
resonator
causes
aliasing
of
low-fre
frequency
curve
is amplitudenot aamplitude
single valued
function
andThis
oscillathe
largest
vibration
before
a
bifurcation.
vibration
amplitudes.
where:
level
as
at
high-vibration
amplitudes;
the
Th
The linear electrostatic spring k0e is negative, and thus
thebe
thermal
carrier
side-bands.
may
sign
the
low-frequency
noise
signal
at
∆ω
multiplie
tions
may
even
become
chaotic
[1]
[4].
Therefore,
the
maxcritical
vibration
amplitude
can
be
written
as
[4],
[15]:
frequencyfrequency.
curve is not
single
valued function
and oscillasources
prese
wers the resonance
Ofathe
nonlinear
terms, the
menta
The
aliasing
of
low-frequency
noise
ca
2
2
carrier
signal
at
ω
results
in
additional
near-ca
ter
scale
[18]
3k
k
5k
k
0
imum
usable
vibration
amplitude
can
be
estimated
from
The
system
can
become
chaotic
at
high
drive
tions
may
even
become
chaotic
[1]
[4].
Therefore,
the
max2e
0e
1e 0e mental
tainingnoise
eleme
2
cond-order correction k2e can be shown to
dominate [1].−
low-fr
to
the
oscillator
phase
κ
=
.
(13)
xcfrom
=!
(12)sented
As illustrated
in Fig.
5,
t
side-bands
at ω,0 ±∆ω.
imum
usable
vibration
amplitude
can
be
estimated
2
the
largest
vibration
amplitude
before
a
bifurcation.
This
√
here
i
may
have
a
si
8k
12k before
The electrostatic
nonlinearity limits
the
resonator
drive
low-frequency
1/f
-noise can
be
considera
amplitudes.
The
critical
amplitude
a
bifurcation
is
the
th
3
3Q|κ|
in
the
resonator
causes
aliasing
of
low-frequen
the
largest
vibration
amplitude
before
a
bifurcation.
This
biasing
also
critical
amplitude can
written
as floor.
[4], [15]:
the typical
magnitud
el as at high-vibration amplitudes;
thevibration
amplitudethe be
thermal
noise
The
low
sourc
carrier
side-bands.
with
a
charg
critical
vibration
amplitude
can
be
written
as
[4],
[15]:
Defining
the
drive
leveloscillaas the motional
current
through
by
where:
quency curve given
is not a single
valued
function
and
sources
present
at the resonator
input
ar
predict
noise
tainin
maycan
be
signi
The
aliasing
of
low-frequency
noise
be
2
resonator,
the
drive
level
istaining
given
and
in the
oscill
ns may even becomethe
chaotic
[1] [4]. Therefore,
the max2 maximum
2 elements
2, by (8) (transistors)
!
x
=
(12)
c
ter
scale
[18]
3k
k
5k
k
In
this
seh
2e
0e
√
may
mental
to
the
oscillator
phase
noise
perfo
1e
0e
x
,
(12)
c = ! √
κ
=
−
.
(13)
may
have
of 1/fhere
-noise
um usable vibration(12)
amplitude
canbe
bewritten
estimated
from
and can
as:
2 a significant amountsented
is
3
3Q|κ|
8k
12k
low-frequency
1/f
-noise
can
be
considerably
l
3 3Q|κ|
trostatic
cou
biasin
biasing also may be noisy, especially
if
it
e largest vibration amplitude before a bifurcation. This
the magnitud
the
thermal
noise
floor.
The
typical
low-frequ
Defining
the
drive
level
as
the
motional
current
through
with
static
transd
with
a
charge
pump.
Notably
mechanica
max
predict
noise
tical vibration
amplitude
can
be
written
as
[4],
[15]:
i
=
ηω
x
.
(14)
where:
where:
0
c
m
the resonator,
the maximum
is the
givenresonator
by if(8)the
andresonator
sources drive
present
inputInare
may
may level
be at
significant
isthe
sca
this
se
spring
effects
kaajakari et al.: analysis
phase noise
oscillators:
ieee 2transactions
on ultrasonics,
(12)
and
can be written
as: elements
2and
2 micromechanical
taining
(transistors)
inthethe
oscillator
c
2
2 3kof
ter
scale
[18].
However,
noise
up-mixi
trostatic
cou
k
5k
k
ter
sc
2e
0e
3k
k
5k
k
1e
0e
2e
0e
1e 0e
!andκ√
tion
is
an
o
xc = As
(12)
ferroelectrics,
frequency
control,
vol.Section
52, .no. 12,
december
2005
= be, seen
− in
(13)
will
IV,
the
maximum
drive
level
may
have
a
significant
amount
of
1/f
-noise
[17].
κ
=
−
.
(13)
static
transdu
2
max
sented
nois
8k
12k
2 is not limited
sented
i8k
= ηω
. here
(14)to a specific
0 xc12k
m
3
3Q|κ|
Ali M. Niknejad
of California, Berkeley
EECSspring
242B,
m
biasing
also
may be noisy,
if Slide:
it effects
is20im
sets the noise floorUniversity
obtainable
with
microresonator-based
the magnitude
of theespecially
noiseup-mixing
at resonator
in
Non-Linear Spring Constant
•
•
•
Noise Aliasing in Resonators
tions on ultrasonics, ferroelectrics, and frequency control, vol. 52, no. 12, december 2005
te nonlinear model is used
duction [14].
spring constants are obthe electrostatic force:
∂C
.
∂x
(10)
second order gives for the
2
2e x )
=
Fig. 4. Schematic representation of noise aliasing. Low-frequency
noise un (∆ω) present at filter input is aliased to carrier side-bands
ω0 ± ∆ω due to mixing in resonator.
• As we(11)have learned in our phase noise lectures, 1/f
3
2
, and k2e = 2 .
2d
d
noise can alias to the carrier through time-varying
ng k0e is negative, and thus
the low-frequency
noise signal Since
at ∆ω multiplied
with the
and
non-linear
mechanisms.
1/f
noise
is
high
for
Of the nonlinear
terms,
the
carrier signal at ω0 results in additional near-carrier noise
be shown to dominate [1].
As illustrated in Fig. 5, this mixing
side-bands
at ω0 ±∆ω.
CMOS, this
is a major
limitation
y limits the resonator drive
in the resonator causes aliasing of low-frequency noise to
mplitudes; the amplitudecarrier side-bands.
valued function and oscillaThe aliasing of low-frequency noise can be very detri[1] [4]. Therefore, the maxmental to the oscillator phase noise performance as
ude can be estimated
from
kaajakari et al.: analysis
of phase noise
micromechanical
oscillators: ieee
transactions
low-frequency
1/fand
-noise
can be considerably
larger
than on ultrasonics,
before a bifurcation.
Thisand frequency control, vol. 52, no. 12, december 2005
ferroelectrics,
the thermal noise floor. The typical low-frequency noise
n be written as [4], [15]:
sources present at the resonator input are the active susAli M. Niknejad
University of California, Berkeley
EECS 242B, Slide: 21
taining elements (transistors) in the oscillator circuit that
to Capacitive
Current
mixed Due
to a higher
frequency
due to Nonlinearity
the time varying gap
nical
nonlinearities
springs
and the max- A.isMixing
law results inB.
mixing
noise
and signal
voltages,
un and u
(c)
MixingofDue
to Capacitive
Force
Nonlinearity
capacitance. The
capacitance
drivefrom
actuated
restively.
(c) Nonlinearis:spring force results in mixing of low
ated
mechanical
Fig. 5.5(a)
Different
mixing
mechanism
for"second
the
noise
voltage
un atu∆ω
to is∆ω
Fig.
illustrates
how
low-frequency
noise
He
#
and signal
frequency
vibrations.
The
main
up-conversion
avenue
illustra
n at
rly on displacement
x
0 the
high-frequency
noise
current.
(a)
Time-varying
capacitor
(plate
disFig.
5(b).
Due
to
square
force
law,
the gap
low-freq
force
C(x)
≈
C
1
+
,
(16)
is
mixed
to
a
higher
frequency
due
to
the
time
varying
0
ings and the maxnoise voltage
undat ∆ω(b)
is mixed
with
the high freq
placement x) results in up-converted
noise current.
Square
force
in
br
capacitance.
The
capacitance
is:
signal
voltage
u
at
ω
.
The
capacitive
force
is
give
ac
0
law
results
in
mixing
of
noise
and
signal
voltages,
u
and
u
,
respecn
ac
d from mechanical
ing the relation between the
signal
voltage uct
andx
tively. (c)
spring force results
in mixing
ofat
low-frequency
where
x0Nonlinear
is thedisplacement
resonator
displacement
the
excitation
"
#
2
!
"
given
(2)
and
(8),
the
U 2by
∂C
(U
+
u
+
u
x
icroresonator
x
dc
ac
n ) Cup-conve
0
0
0
the
and signal frequency
vibrations.
Fn1=+ the ≈
1+
2 p
C(x)
≈
C
,
(16)
frequency.
The current
current
through
resonator
due
to
the
2 ∂x current
2 mixingd can bed w
due 0to capacitive
tance
d
would
ng effects, the capaci- voltage un is then:
c
where the first ithree
terms
of
power
series
expansion
= 2Γ
unexcitation
,
where
is
the
resonator
displacement
at
the
cu
ac
ing x
the
relation
between the
signal voltage
and
resonator
n been
0
capacitance
have
kept.
The
products
uac un an
roresonatorof noise.
wn-conversion
∂(C(x)u
C
)
nresult(8),
0the resonator
displacement
given
by
(2)
and
up-converted
in
up-converted
noise
at ω
± ∆ω.
Thus,
the
0 noise
frequency.
The
current
through
the
due
to
the
=
≈
ẋ
u
+
C
u̇
.
(17)
i
n
0
n
0
n
ntity:
where∂t
wecurrent
have
defined
current
aliasing
facto
at ω0 ±
∆ω
is: the
d
current
due
to
capacitive
mixing
can
be
written
as:
voltage
u
is
then:
n
effects, the capaciC0
C0 x0
2
Qω
η
c
F
(ω
±
∆ω)
≈
u
u
+
2
Udc
un .
n
0
n
0ac
The first term inin(17)
isresponsible
for
the
noise
up) t + cos (ω0of− noise.
∆ω) t,
=
2Γ
u
u
,
(18)
d
d
d
conversion
which
c
ac
n
Γc =
.
∂(C(x)un )
C0
2kU
conversion
and
results
in
noise
current
at
Us=
≈
ẋ
u
+
C
. ± ∆ω.(17)
i
(15)
0
n
0
n
0 u̇ω
ndc
by (1
y:
(a)
(b)
∂t the This
d aliasing noise
where we have defined
current
factor:
high-frequency
force near the resonator
Mixing: Capacitive Current Non-Linearity
c
Itis
As (15) nance
shows,
thethecurrent
by (18)
excites
resonator, iand
the displacement
n given
2
(25).
first
term
in
(17)
isresponsible
for
the
upby
(3).
Close
to the resonance,
thenoise
noise-induced
dis
+ cos (ω0 − This
∆ω) t,term isThe
Qω
η
amplitudes
at
frequencies
ω
±
∆ω.
0
0
usually much smaller
(by
10X
~
100X)
ment is: .
Γ
=
(19) Usc
ble I)
conversion
and
results
in
noise
current
at
ω
±
∆ω.
(15)
0
2kUdc
than mixing due to the force non-linearity xF ≈ −jQ Fn ,
brack
n
c
As (15) shows, the current in given by (18) haskequal ing c
resulting noise current is:
amplitudes at frequencies ωand
∆ω.
capac
0 ±the
•
iF
n = η ẋn = −jηω0 xn .
kaajakari et al.: analysis of phase noise and micromechanical oscillators:
ieee transactions
on ultrasonics,
Substituting
(21) and
(22) to (23) and using
ferroelectrics, and frequency control, vol. 52, no. 12, december 2005
−jQηu /k leads to:
ac
Ali M. Niknejad
University of California, Berkeley
iF
n , 242B, Slide: 22
n = 2ΓF uac uEECS
2
!the low-frequency
"
F
n
F
Fig. 5(b). Due
square
force
law,
U 2to
∂Cthe
(U
+
u
+
u
)
C
x
dc
ac F n ,
0
0
(22)
n
Fn =
≈xnxF≈≈ −jQ
1
+
2
,
(22)
2 n∂x
2 kk,with
d the high
d frequency
noise voltage u
at ∆ωn is −jQ
mixed
(20)
nalysis of phase noise and micromechanical
oscillators
2325 force is given by:
signal
voltage uac at ω0 . The capacitive
Mixing: Capacitive Force Non-Linearity
and
the the
resulting
noise
current
is:
and the
resulting
noise
current
is: series expansion of the
where
three
terms
of power
B. Mixing
Due tofirst
Capacitive
Force
Nonlinearity
(b)
2 uac!
capacitance
have Fbeen
kept.
The+
products
un and x
xun"
U 2 ∂C
(U
+
u
u
)
C
dc
ac
n
0
0
i
=
η
ẋ
=
−jηω
x
.
(23)
F
n
0
n
The
second
main
up-conversion
avenue
is
illustrated
in
n
at
ω0 ±0∆ω.
Thus,1 the
Fresult
≈= η ẋnoise
+ 2force ,(23)
n = in up-converted
i
=
−jηω
x
.
n
n
n
Fig. 5(b). Due2to ∂x
the square force law, the
low-frequency d
2
d
at
ω
±
∆ω
is:
0
(20)
noise Substituting
voltage un at ∆ω (21)
is mixed
with(22)
the high
and
to frequency
(23) and using x0 =
signal voltage uac at ω0 . The capacitive force is given by:
−jQηuac /k leads
C0 x0 and using x0 =
Substituting
(21)to:and C(22)
to (23)
0
F (ω(U
∆ω)
≈ 2 of
u0ac!power
un +x02" series
Udc
un .
0±
where theU 2first
expansion
of the
∂Cn three
dc + uterms
ac + un )d C
d
d
−jQηuac
Fn /k
= leads
≈ to:
1+2
,
(21)
F
2
∂x
2
d
d
in kept.
= 2ΓF The
uac unproducts
, (20)
capacitance have been
uac un(24)
and xun
result
in first
up-converted
noise
at near
ω0 ±
∆ω.
Thus,resothe force
This
high-frequency
noise
force
the
resonator
where
the
three terms i
ofFpower
series
expansion
of
the
2Γ
uand
(24)
where we
have
defined
the
force
aliasing
Fu
ac
n , xufactor:
nThe=
capacitance
have
been
kept.
products
u
u
n
n
at ω0nance
± ∆ω
is: the resonator, andac the
excites
displacement
is given
result in up-converted noise at ω0 ± #
∆ω. Thus, the force$
(3). Close to theQω
resonance,
theQηU
noise-induced
2
at ωby
0 ± ∆ω is:
0η
dc
displacewhere we
have
ΓF ≈ theCforce
1 − j2aliasing
.factor:
(25)
C
x
ment
is: defined
0
0
0
kd2
C0 2kU
xac
dc C0u
0 un +
F
(ω
±
∆ω)
≈
Udc un .
(c)
n
0
Fn (ω0 ± ∆ω) ≈
uac un + 2
Udc un .
d#
d $
d
d
2 d d Fn
(21)
F
(21)
Qω
η
QηU
x
≈
−jQ
,
(22)
0
dc
ism for the noise voltage un at ∆ω to
Here the first term in
n brackets is due to the square
(b)
k
Γ
≈
1
−
j2
.
(25)
F
a) Time-varying
capacitor
(plate
disThis
high-frequency
noise
force
near
the
resonator
resolawas[product
uacdc
un in (20)],non-linearity,
andkdthe second term
(b) The form is the force
same
the
capacitance
2kU
nancehigh-frequency
excites the resonator, and
the displacement
is giventhe resonator reso
verted noise current. (b) Square force
This
noise
force
near
and
the
resulting
noise
current
is:
in
brackets
is
due
to
the
nonlinear
capacitance [prodby
(3).
Close
to
the
resonance,
the
noise-induced
displacebutunthe
magnitude
is
much
higher
and
dominates
for
d signal voltages,
and uac
, respecnance
excites
the resonator,
is given
uctis:
xun in (20)].
If we had and
kept the
only displacement
the first term of
ment
ce voltage
results in umixing
of
low-frequency
F
se
at
∆ω
to
Here
the
first
term
inηẋbrackets
isn . has
due
to capacithe(23)square
n
i
=
=
−jηω
x
most
resonators.
A
linear
coupling
capacitor
much
n
0
the
power
series
expansion
of
capacitance
[linear
n
s.
by (3). Close to xthe
resonance,
the
noise-induced
displace
Fn
F
g capacitor (plate dis- force
≈ −jQ
, in (20)], and
(22) the second term
n (1
law
[product
u
u
ac
n
tance,
C(x)
=
C
+
x/d)],
then
the
force
aliasing factor
k
0
reduced
noise
up-conversion
ment
is:
rent. (b) Square force
Substituting
(21)
and (22)
to (23) capacitance
and using x0 =[prodwould
be:
in brackets
is due
to the
nonlinear
and
the resulting
noise current
is:
es,
uac
, respeche usignal
and
resonator
/k leads to:oscillators: ieee transactions on ultrasonics,
n andvoltage
kaajakari
et al.:
analysis of phase−jQηu
noise andac
micromechanical
uct xu
(20)].
If
we
had
only
the
first
term
of
2 keptFn
F
n in
ferroelectrics, and frequency
control,
vol. 52,
no.iF
12,
december
2005
=
η
ẋ
=
−jηω
x
.
(23)
and
the up-converted
noise
Qω
η
xing(8),
of low-frequency
n
0
n
0 −jQ
n
x
≈
,
(22)
n
Γ
≈
(linear
C),
(26)
F
Ali M. Niknejad
of California,
Berkeley
EECS 242B,
Slide: 23
the
series
expansion
ofF ucapacitance
[linear
capaciiFn2kU
= 2Γ
(24)
urrent
mixing can be written
as: powerUniversity
ac uk
n,
•
at
ω=
± ∆ω
is:+ xn , the up-converted noise for
substituting
x
x
0
k noise force is
substituting x = x + x , the up-converted
0
(a)
is illustrated in Fig.0 5(c).n The
forceCdue
to the noise voltag
C0
0 x0
Fn (ω0 ± ∆ω) ≈
uac un + 2
Udc un .
k
d
d
d
F
=
ηu
results
in
low-frequency
resonator
vibration
k
n
n
(21)
FFnn==spring
2k
x
.
Due
to the
nonlinear
these
low-fr
2k00 kk11xx0effects,
x
.
(28
0 nn
(b) Because these vibrations are far from the resonance, th
This high-frequency
noise force
nearthe
the resonator
resovibrations
are
multiplied
with
vibrations
at th
amplitude
is
given
by:
nance
excites
the
resonator,
and
the
displacement
is
given
The
resulting
currentcan
can be
be evaluated
as as
in Section
II
The
resulting
current
evaluated
in
Sectio
by
(3). Close to the resonance,
theforce
noise-induced
displacefrequency.
Assuming
spring
F
=
k
x(1
+
k
0
B. Assuming
that
the
nonlinear
spring
is
dominated
b
ment is:
ηu
n
B.substituting
Assuming
that
nonlinear
spring
is dominat
x0n +
=
≈
.
(27
x=
xthe
xH(ω)F
,
the
up-converted
noise
n
the capacitive
effects
given
by
(11),
the
up-converted
nois
n
F
n
kthe up-converted
xF
−jQ(11),
,
(22)
n ≈by
the capacitive
effects
given
k
current due to nonlinear spring mixing is given by:
kspring
thethe
nonlinear
these
low-frequenc
and
resulting F
noise
current
is:effects,
currentDue
duetoto
nonlinear
spring
mixing
is
given
by:
=
2k
k
x
x
.
0
1
0
n
n
iiFkn==
2Γ
uthe
,
(29
vibrations are multiplied
with
at
the
sign
k
acxuvibrations
n
η
ẋ
=
−jηω
.
(23)
n
0 n
n
frequency. Assumingikspring
force
F ,= k0 x(1 + k1 x) an
=
2Γ
u
u
k
ac
n
Substituting
(21)
andcan
(22)
to
(23)
and usingfactor:
x0 =as in Sec
The
resulting
current
be
evaluated
n the
where
we
have
defined
spring
aliasing
substituting
x
=
x
+
x
,
the
up-converted
noise force is
0 to: n
−jQηuac /k leads
Mixing: Non-Linear Spring Force
B. Assuming that the nonlinear
spring is domin
2
4
i =3Q
2Γ
uωu
(24)
η, xUaliasing
where we have definedF kthe
spring
factor: (28
0x
dc
=
2k
k
.
0
1
0
n
Γk n=
j
. the up-convert
(30
the capacitive effects
given
by2 (11),
3
2daliasing
k factor:
where we have defined the force
2
4mixing
current
due
to
nonlinear
spring
is Section
given by
#
$
3Q
ω
η
U
The resulting current
can
be
evaluated
as
in
II
0
dc
Qω η
QηU
≈
1 − j2
. .
(25)
D.
Comparison
ofΓΓkMixing
Mechanisms
=
j
2kU
kd
B.
Assuming
that
the
nonlinear
spring
is
dominated
b
2 k3
(c)
2d
k very small due
Amplitude
of
noise
at
low-frequency
is
•
i
2Γ(11),
utonup-converted
,the square
the
given
by
the
nois
ku
Fig. 5. Different mixing mechanism for the noise voltage
u atcapacitive
∆ω to
Here effects
the first term
is ac
due
n in=brackets
Thedis-ratio
ofnonlinear
aliasing
factors
due
the
up
high-frequency noise current. (a) Time-varying capacitor (plate
forceto
law
[product
u uspring
in (20)],mixing
and
the to
second
termcurrent
current
due
is
given
by:
to
resonator
Q.
The
noise
is
up-converted
through
placement x) results in up-converted noise current.
(b) Square force
D.
Comparison
ofnonlinear
Mixing
Mechanisms
in and
brackets
is due to the
nonlinear
capacitance
[prod-by (19) an
conversion
spring
mixing
given
law results in mixing of noise and signal voltages, u and
u , respecuct xu defined
in (20)]. If wethe
had kept
only thealiasing
first term of factor:
where
we
have
spring
tively. (c)
Nonlinear
spring force non-linearity.
results in mixing
of low-frequency
the
spring
k
(30), respectively, is:
F
n
F
0
F
2
ac n
dc
dc
n
ac n
n
ac
n
and signal frequency vibrations.
the power series expansion
ofkcapacitance
in = 2Γ
uac un , [linear capacitance, C(x) = C0 (1 + x/d)], then the force aliasing factor
!
"2
#2
4
would be: !
(29
The ratio
of
aliasing
factors
due
to the curren
of
the
three,
about
500X
• This term is the smallest
3Q
ω
η
U
! Γc ! the1springdkaliasing
0
dc factor:
where we have defined
! !
ing the relation between the signal voltage and resonator
displacement given by (2) and (8), the up-converted noise
current due to capacitive current mixing can be written as:
=Qωspring
jη
. (26) by (19
and non-linearity.
nonlinear
mixing
. given
(31
k=
! ΓΓ
smaller than theconversion
capacitance
2
3
Γ! ≈ 3Q (linear
C),
2d4DCk
k
2kU 2 ηU
(30),
respectively,
is:
kaajakari et al.: analysis of phase
noise
and micromechanical oscillators:
ieee
transactions
3Q
ω0 η Uondcultrasonics,
i and
= 2Γ
u u , control, vol. 52,(18)
is the2005
same
the current aliasing .factor given
Γk =as jmicroresonator
(30
ferroelectrics,
frequency
no. 12,which
december
2
3
Substituting
typical
parameters
(Ta
2d k
by (19).
Ali M. Niknejad
University of California,
Berkeley
D.
Comparison
of
Mixing
Mechanisms
!
!
"
#2 EECS 242B, Slide: 24
where we have defined the current aliasing factor:
c
n
c ac n
F
0
2
dc
supported by a micro-machined silicon substrate as shown in Fig. 2.10. The metal/air
FBAR Resonator
interfaces serve as excellent reflectors, forming a high Q acoustic resonator. The FBAR
has a small form factor and occupies only about 100!m x 100!m.
Drive Electrode
Electrodes
Air
100 !m
AlN
Si
Air
Si
Sense
Electrode
Fig. 2.10: (Left) structure (right) photograph of a FBAR resonator.
“MEMS” technology is the Thin Film Bulk
• Another
The FBAR resonator can be modeled using the Modified Butterworth Van Dyke circuit
Wave Acoustic Resonators (FBAR) as shown in Fig. 2.11 [Larson00]. Lm, Cm and Rm are its motional inductance,
It uses a thin layer of Aluminum-Nitride piezoelectric
•capacitance
and resistance respectively. Co models the parasitic parallel plate capacitance
material sandwiched between two metal electrodes between the two electrodes and Cp1 and Cp2 accounts for the electrode to ground
• The FBAR has a small form factor and occupies only
capacitances.
Losses inxthe100µm.
electrode are given by R0, Rp1 and Rp2.
about 100µm
Ali M. Niknejad
Lm
Cm
University of California, Berkeley
Rm
EECS 242B, Slide:
25
capacitance and resistance respectively. Co models the parasitic parallel plate capacitance
The frequency response of the FBAR resonator is shown in Fig. 2.12. The FBAR
FBAR Resonance
between the two electrodes and Cp1 and Cp2 accounts for thebehaves
electrode
liketoa ground
capacitor except at its series and parallel resonance. It achieves an
capacitances. Losses in the electrode are given by R0, Rp1 and Rp2. unloaded Q of more than a 1000.
Lm
Cm
Rm
Parallel
resonance
C0
R0
Cp1
Cp2
Rp
Rp
Fig. 2.11 Circuit model of the FBAR resonator.
Impedance (!)
1000
100
10
1
100M
37
• Very similar to a XTAL resonator.
Series
resonance
1G
10G
Frequency (Hz)
Has two modes:
Fig. 2.12 Frequency response of the FBAR resonator.
series and parallel
2.4.2 Advantages of FBAR Resonator
• Unloaded Q ~ 1000
1. High Q factor
Q factor
of the FBAR resonatordirectly
is more than 1000,
which is much higher than the
integrated
with
• This technology will notThe be
Q-factor of an on-chip
LC resonator.
The high Q packaging
factor allows implementation of low
CMOS, but there is a potential
for
advanced
loss filters and duplexers to attenuate the out of band blockers and reject the image
or procesing.
signals. In some applications, the bandwidth of these FBAR filters is sufficiently small
Ali M. Niknejad
for channel filtering, relaxing the linearity requirement of mixers and removing the need
University of California, Berkeley
EECS 242B, Slide:
26
the FBAR. Transistors M1 and M2 share the same current but their transc
and gm2 sum, reducing the current needed for oscillation by half. The tra
Capacitors
1 and C2 transform the amplifier’s transco
FBAR COscillator
designed to operate in the sub-threshold regime to obtain higher current e
Vdd
negative resistance
• Rm ~ 1 ohm
• gm ~ 7.8 mS used (3X)
• C1=C2=.7pF
• gm/Id ~ 19, Id ~ 205μA
• Start-up behavior shown
$
g m1 ! g m 2
# C1 C 2
2
at frequency
#. Th
M2
Rb
44
M1
FBAR
R0
C0
below:
C1
Gain compression
Oscillator
transient
response
Ali M. Niknejad
L m Cm Rm
Y
C2
Fig. 3.3: Schematic of an ultra low power FBAR oscillato
Oscillator
turns on
VDD
gating
signal
X
Exponential
growth
Steady state
Capacitors
oscillation
C1 and C2 transform the amplifier’s transconductance g m "
negative resistance $
Fig. 3.6: Measured startup transients of
an FBAR
oscillator.Berkeley
University
of California,
g m1 ! g m 2
# C1 C 2
2
at frequency #. Thus, a higher ne
44
EECS 242B, Slide:
27
The measured phase noise performance is shown in Fig. 3.9. The oscillator achieves a
phase noise of -98dBc/Hz and -120dBc/Hz at 10kHz and 100kHz offsets respectively.
Measured Results on FBAR Osc
800µm
The good phase noise performance is mainly attributed to the high Q FBAR resonator.Fig. 3.7: Die photo of the FBAR oscillator
-90
Phase Noise (dBc/Hz)
-98 dBc/Hz
3.2.4 Measured Results
FBAR
-100
Sense electrode
Force electrode
The oscillator is self-biased with a 430mV supply and dissipates 89µ
-110
Bond wires
-120 dBc/Hz oscillation at 1.882 GHz. The measured zero to peak output voltage s
-120
CMOS Die
Instrument’s
The
output
noise
floor spectrum of the oscillator is shown in Fig. 3.8. A clean
-130
-140
10k
obtained and no close-in spurs are observed. Second, third, fourth and fif
100k
1M
Frequency offset (Hz)
800µm
measured to be -43.8 dBc, -45.5 dBc, -68.8
dBc and -69.7 dBc respective
10M
Fig. 3.7: Die photo of the FBAR oscillator
Fig. 3.9: Measured phase noise performance of FBAR oscillator.
Operate
oscillator
in
“current
•
A better phase noise performance is obtained by operating the oscillator at the edge of
3.2.4 Measured Results
limited” regime
swing
~ 167 mV,
Pdc measured
~at 1.882 GHz.
measured phase
noise at various
power consumptions.
The oscillation
optimal
phaseThe measured zero to peak output voltage swing i
• Voltage
The output spectrum of the oscillator is shown in Fig. 3.8. A clean output
noise is -100 dBc/Hz
10kHz offset and -122 dBc/Hz at 100kHz offset and it occurs
104atμW
The oscillator
is self-biased
the current limited regime [Ham01]. Fig. 3.10 shows the output
voltage swing
and with a 430mV supply and dissipates 89µW for
obtained and no close-in spurs are observed. Second, third, fourth and fifth harm
when the output voltage swing is 167mV with the oscillator consuming 104µW. Beyond
this
operating
Ali M.
Niknejad
measured to be -43.8 dBc, -45.5 dBc, -68.8 dBc and -69.7 dBc respectively.
point, the oscillator transits into theUniversity
voltageof California,
limited Berkeley
regime Fig.
which
3.8:the
Output frequency spectrum ofEECS
FBAR
242B,oscillator
Slide: 28