Calculus 2 Test #5 Review - Madison Area Technical College
advertisement

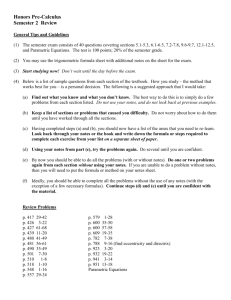
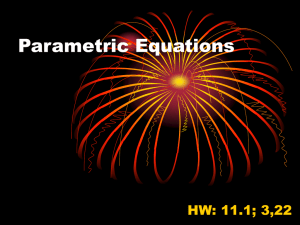
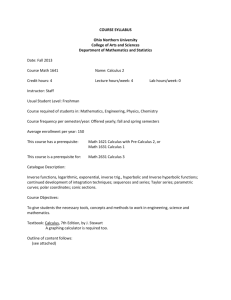
Calculus 2 Test #5 Review Sheet Page 1 of 10 Section 9.1: Plane Curves and Parametric Equations Big idea:. Points on a graph can be represented by two separate equations for the x and y coordinates in terms of a third variable (usually called t), instead of a single equation. The variable t represents time in many applications, which makes parametric equations useful for describing the location of objects as a function of time. Big skill: You should be able to graph parametric equations by hand and by using a calculator or Winplot. You should also be able to recognize and easily graph the parametric representation of some common curves like lines, parabolas, circles, and ellipses. Parametric equations are obtained by setting coordinates equal to functions of a third variable: x x t y y t Both functions have the same domain D for the independent variable t. The independent variable t is often thought of as representing time. Parametric equations for circles and ellipses: x h r cos t 2 2 Circle: If x h y k r 2 , then (and vice-versa). y k r sin t x h a cos t 1 , then (and vice-versa). a b y k b sin t Parametric equations for lines: xt If y mx b , then y mt b Ellipse: If x h 2 2 y k 2 2 x a bt d If , then y c x a b y c dt Calculus 2 Test #5 Review Sheet Page 2 of 10 Section 9.2: Calculus and Parametric Equations x x t Let x y t First derivative of the graph produced by parametric equations: dy dy dt t c dx x a x c dx dt t c . dy dx x a x c y c x c If x c y c 0 , then dy dx lim xa f c t c y t . x t Second derivative of the graph produced by parametric equations: d dy d 2 d y d dy dt dy dt dx dx dx 2 dx dx dx dx dt dt d2y dx 2 d y t dt x t x t y t x t y t x t x t 3 Theorem 2.1: Vertical and Horizontal Tangent Lines of Parametric Equations x x t If x t and y t are continuous, then for the curve defined by : x y t (i). (ii). If y c 0 and x c 0 , then there is a horizontal tangent line at the point x c , y c . If x c 0 and y c 0 , then there is a vertical tangent line at the point x c , y c . Meaning of first derivatives when parametric equations represent an object’s position: The horizontal component of velocity is: vx t x t (assuming the x axis is “horizontal”). The vertical component of velocity is: vy t y t (assuming the y axis is “vertical”). The direction of the velocity is: dy dx x x t The magnitude of the velocity is: v t y t . x t x t y t 2 2 . Calculus 2 Test #5 Review Sheet Page 3 of 10 Meaning of second derivatives when parametric equations represent an object’s position: The horizontal component of acceleration is: ax t x t (assuming the x axis is “horizontal”). The vertical component of acceleration is: ay t y t (assuming the y axis is “vertical”). This The direction of the acceleration is: tan a y t , where a is the standard angle that the x t acceleration vector makes with respect to the x-axis. x t y t The magnitude of the acceleration is: a t 2 2 . Theorem 2.2: Area Enclosed by a Parametric Curve x x t Suppose that with c t d describe a curve that is traced out clockwise exactly once as t x y t increases from c to d, and where the curve does not intersect itself, except at the initial and terminal points (x(c) = x(d) and y(c) = y(d)). d d c c Then the enclosed area is: A y t x t dt x t y t dt . If the area is traced out counterclockwise, then the enclosed area d d c c is: A y t x t dt x t y t dt . Analysis of the Scrambler Ride: See http://matcmadison.edu/is/as/math/kmirus/20062007B/804232/804232LP/804232Sec0902.doc for my analysis. Calculus 2 Test #5 Review Sheet Page 4 of 10 Section 9.3: Arc Length and Surface Area in Parametric Equations Theorem 3.1: Arc Length for a Parametrically Defined Curve. x x t If a curve is defined parametrically by for a t b, and x and y are continuous on x y t [a, b], and the curve does not intersect itself (except at a possibly finite number of points), then the arc length s of the curve is given by: b s x t y t dt a a 2 2 Notice that since v t b 2 2 dx dy dt dt dt b x t y t , s v t dt . 2 2 a Lateral Surface Area of a Solid of Revolution: b A 2 radius arc length dt a For a curve defined by parametric equations rotated about the x-axis: b A 2 y t x t y t dt 2 2 a For a curve defined by parametric equations rotated about the line y = c: b A 2 y t c x t y t dt 2 2 a For a curve defined by parametric equations rotated about the line x = d: b A 2 x t d a x t y t dt 2 2 Calculus 2 Test #5 Review Sheet Page 5 of 10 Section 9.4: Polar Coordinates r 2 x2 y 2 y tan x Converting from polar coordinates to rectangular coordinates: x r cos Plug into the equations y r sin x r cos y r sin Converting from rectangular coordinates to polar coordinates: r 2 x2 y 2 Plug into the equations , then solve for r and . y tan x Keep in mind that r could be positive or negative. Keep in mind that is only defined to within multiples of 2. Keep in mind that since the domain of the arctangent function is , , you have to work a 2 2 little harder to get the correct angle for when is in quadrants II or III by either: o looking at the graph and using reference angles y o using the simple computer science trick: tan 1 when x < 0. x Converting an equation from rectangular coordinates to polar coordinates: Make the substitutions x r cos y r sin Calculus 2 Test #5 Review Sheet Page 6 of 10 Section 9.5: Calculus and Polar Coordiantes For a graph defined in polar coordinates r f , the rectangular coordinates are calculated as: x r cos f cos . y r sin f sin First derivative of a graph described in polar coordinates: dy dy d a f sin f cos a . dx a dx f cos f sin a d a Horizontal tangent lines will occur where dy/d = 0 and dx/d 0. Vertical tangent lines will occur where dx/d = 0 and dy/d 0. Area “swept out” by a graph described in polar coordinates: b 2 1 A dA f d 2 a Arc length of a graph described in polar coordinates: b s a f f 2 2 d Calculus 2 Test #5 Review Sheet Page 7 of 10 Section 9.6: Conic Sections Parabolas Theorem 6.1: Equation of a parabola and its relation to geometry The parabola with vertex at the point (b, c), focus at (b, c + 1/(4a)), and directrix given by the line y = c – 1/(4a) is described by the equation y = a(x – b)2 + c. Ellipses Theorem 6.3: Equation of an ellipse and its relation to geometry The equation x x0 2 a2 y y0 2 1 , where a > b > 0 describes an ellipse with the following b2 properties: Center at x0 , y0 Foci at x0 c, y0 , (or x0 , y0 c if b > a), where c a 2 b2 Vertices at x0 a, y0 and x0 , y0 b (x-2)^2/9 + (y-1)^2/4 y = 1 (2, 3) (-1, 1) (2, 1) (2 - sqrt(5),1) (5, 1) (2 + sqrt(5),1) x (2, -1) Hyperbolas Theorem 6.4: Equation of a hyperbola and its relation to geometry The equation x x0 2 a2 y y0 2 b2 Center at x0 , y0 1 describes a hyperbola with the following properties: Foci at x0 c, y0 , where c a2 b2 Vertices at x0 a, y0 Asymptotes y b x x0 y0 a y (x-2)^2/9 - (y-1)^2/4 = 1 (2 - sqrt(13),1) (2 + sqrt(13),1) (2, 1) (5, 1) (-1, 1) x Calculus 2 Test #5 Review Sheet Page 8 of 10 Section 9.7: Conic Sections in Polar Coordinates Theorem 7.1: Eccentricity of the conic sections. The set of all points whose distance to the focus is the product of the eccentricity e and the distance to a directrix is : An ellipse for 0 < e < 1. A parabola if e = 1. A hyperbola if e > 1. A circle has eccentricity 0 (because every point on the circle is a focus…). Polar form of the conic sections: ed r e cos 1 For a parabola, the eccentricity is e 1 : r = 1.00*1/(1.00cos(t)+1); 0.000000 y <= t <= 6.283190 x For a “horizontal” ellipse x x0 a2 2 y y0 2 b2 1 , the eccentricity is e c b2 1 2 . a a r = 0.75*1/(0.75cos(t)+1); 0.000000 y <= t <= 6.283190 x For a hyperbola x x0 a2 2 y y0 b2 2 1 , the eccentricity is e r = 1.25*1/(1.25cos(t)+1); 0.000000 y <= t <= 6.283190 x c b2 1 2 . a a Calculus 2 Test #5 Review Sheet Page 9 of 10 Theorem 7.2: Polar equations for conic sections with different directrixes. The conic section with eccentricity e > 0, focus (0, 0) and the indicated directrix has the polar equation: ed , if the directrix is the line x = d > 0. r e cos 1 r ed , if the directrix is the line x = d < 0. e cos 1 r ed , if the directrix is the line y = d > 0. e sin 1 Calculus 2 r Test #5 Review Sheet ed , if the directrix is the line y = d < 0. e sin 1 Page 10 of 10