comments on the NEST Challenge Architecture Document
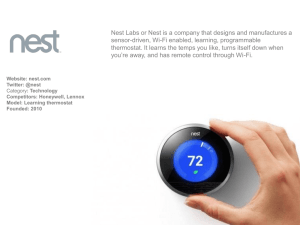
advertisement

Cory, This document is a good attempt at specifying the pursuer-evader problem’s required interfaces. I have, however, some observations that might be useful. You’ll find those observations below. Feel free to pass this on for further comment if you wish. Michael Lemmon Dept. of Electrical Eng. University of Notre Dame lemmon@nd.edu 574-631-8309 It is necessary to make a distinction between specifying “services”, “algorithms”, and “components”. This document seems to concentrate on the component/algorithm interfaces and this may unduly restrict M/W providers. We’ve had an opportunity to think about these interfaces because our baseline demo had to wrestle with the problem of integrating multiple NEST services from our own programmers on a single platform. In specifying service interfaces it is necessary to be clear about the messages going into and out of the service (which is done in the initial document), but it is also necessary to place some specifications of a quantitative nature. I use the interface to the pursuer as an example. How often do the pursuers expect to receive messages? How regular these messages should be? How accurate should the position/velocity estimates be? What is the agreed upon format for specifying target identity? Should the messages be time stamped, so that “stale” estimates can be discarded? How regularly should the pursuer receive estimates? …….. So with this observation in mind, I suggest the following: 1. Specify the PURSUER’s interface to the sensor network. a. The specification should consist of a list of the “modules/components” with a list of messages that the pursuers expect from the sensor network with specifications on the format of the messages, AM channels used, and quantitative specs on the rate at which the messages should be delivered as well as the accuracy of the data. The list in the initial document is a good start, but it is lacking in details on the actual message format, etc. This has to be nailed down so that M/W providers can cleanly separate their work from those at Berkeley concerned with the pursuer/evader software. You can think of this as a specification for the “pursuer service”. b. A clear description of what the pursuer service does with the information provided and sent to the sensor network. c. A picture that graphically shows the interface. Something like the following: module pursuer function: catch evaders using sense_net estimates module sense_net function: generate estimates of evader position/velocity… interface EvaderDetected (AM, DEST?, pos.,vel., ident, tstamp) AM=51;DEST=BCAST or SPECIFIC; pos accuracy =?; vel accuracy =?; Ident = ?; Tstamp =?; message frequency and other specs=?; Purpose = get sense_net estimates. interface RequestEntry (AM, DEST?, ID_number) AM=52;DEST=BCAST or SPECIFIC; ID_number = ?; Purpose: request entry to network. interface PurserMsg( format); specs on data fields; purpose of messages specs on message frequency 2. Specifications on the coordination of NEST services a. What we’ve found is that NEST services (synchronization, localization,…) may all execute in a concurrent fashion. It is useful for a node to be able to respond to sync messages from another node, even though it may be actively doing something else. Moreover, it is unrealistic to expect that all nodes in the network will be doing the same thing at the same time. So, if developers use a paradigm that supports concurrent execution of services, you will need to specify some way in which to coordinate the services. I think this is missing from the initial document. b. What we’ve done is provide a high-level “coordination service” that periodically requests NEST services to do something, handles signals from services that trigger the initialization of other NEST services. We’ve implemented this as a state machine. An example of what we’ve done is shown graphically below. I think we need something like this to be specified at the beginning so that other NEST middleware providers have a clear understanding of how their services will interface with others. I believe, we can provide some initial functionality based on what the sensor-network algorithm is going to look like and then let providers make changes to this if needed. What will remain fixed is the I/F between the sensor network and the pursuer and the coordinator and the constituent NEST services. c. A possible graphic for this is shown below. What I’ve shown here is an interface to a higher level user_app and the coordinator. We probably don’t need this higher level user_app for the sensor network. But this type of architecture could also be used on the pursuer and evader and I expect the user_app in this case would the the control algorithms governing the pursuer’s motion. The interface between the coordinator and NEST service consists of two type s of objects; a command and a signal from the service. The command is used to place the service in some specified set and the event should be something like a service done/ timedout/ or other thing. I believe we should probably specify a basic list of service signals (like “done”) as well as service commands. But the format should be kept sufficiently flexible that M/W providers can add their own signals and commands while working within the framework provided by the specification document. Module: user_app Interface between NEST service and some user application. This is probably not needed her, but we have some projects where this has become an issue. Module: NEST_coordinator I/F between NEST coordinator and Services. Service event: done/timeout/etc. Service command: start, sleep, …. Service 1 Service 2 3. Specifications for services should provide some sort of conceptual framework that everyone can fit into. We’ve found it useful to think of each service as having three distinct substates: The service can be actively requesting information from the network. We’ve usually done this in a periodic manner. The service can be passively responding to signals from the external environment (this can include sensors or messages over the network), or the service can be disabled. Commands from the coordinator determine which of the substates the service will enable/disable. In order to specify a service, therefore, we need to do the following: a. Describe the service’s functionality. b. Describe module’s interface in a way reminiscent of the specifications on the puruser/sensor_network interface. These specifications should include the following: prototype declarations for each variable in the command/signal passed generated by the module. A clear description of what that variable is. What the proper range of values for the variable will be. How frequently the messages should be sent and so on. c. We’ve found it useful to divide the interface to the service component as shown below. Commands from the coordinator (or other components) that initiate active tasks within the service. Signals from sensors or the network that initiate passive tasks within the service, and then the commands/signals that are generated by the component within response to these active/passive tasks. We can view a service graphically as shown below: d. Finally, we need a list. My list of NEST services basically corresponds with the initial documents. I have one major variation that focuses on a module that implements a shared memory service. This would be used by each module to store and manipulate “data” about the node’s neighborhood in a mutually exclusive manner. These are specs on services, rather than components. i. Clock synchronization service ii. Localization service: iii. Target Detection/Estimation service: iv. Route Discovery Service: v. Message Routing/Streaming Service: vi. Telemetry Service (I believe the initial document refers to this as the debugger service). vii. Calibration service viii. Data Service EVENTS signaled back to coordinator such as SYNC_DONE or SYNC_BROKEN Commands from coordinator: START CLOCK_SYNC AM_MSG’s to neighbors or commands to other components. AM_MSG’s sync messages Audio signals from Microphone.