DynLAB: A Web Based Dynamics and Control Course
advertisement

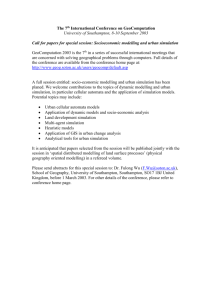
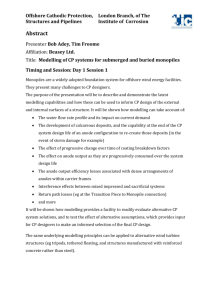
DynLAB: A Web Based Dynamics and Control Course Herman Mann1, Michal Ševcenko2 Paul Dillon3 Czech Technical University, Computing and Information Centre mann@vc.cvut.cz,sevcenko@vc.cvut.cz 3 Institute of Technology Tallaght, Tallaght, Dublin. Paul.Dillon@it-tallaght.ie 1,2 Abstract The DynLAB project currently being developed by an experienced international consortium aims at motivating young people to study engineering, and at improving engineering training using innovative didactic and technological approaches. The emphasis and style of the course differs from most of the existing courses by exposing learners to a novel systematic and efficient methodology (using multipoles) for realistic modelling of multidisciplinary system dynamics applicable to electrical, magnetic, thermal, fluid, acoustic and mechanical dynamic effects in a unified way. The course is accompanied by a large collection of examples of various problems solved both in academia and industry to imitate knowledge sharing and informal learning typical for large organisations. The resulting web-based training modules are supported across the Internet by tools like a robust simulation engine DYNAST, publishing and monitoring system, and environment for virtual experiments. DYNAST can be used across the Internet as a modelling toolbox for the MATLAB control design toolset installed on client computers. Keywords: engineering, education, control, design, Internet 1. Introduction The subject of dynamics and control underlies all aspects of modern technology and plays an important role in giving a competitive edge to products. The use of microcontrollers with mechanical systems increases with the ever-growing demands on operational speed, efficiency, safety, reliability, or environmental protection. This use of technology is sometimes described as the application of mechatronics. World wide and national authorities, however, report a drop off in the uptake of technical courses, due to a decline of interest in engineering study among young people [6], [7]. Part of the problem is the perceived difficulty that science and engineering based programs have, with regard to the mathematical content and required back ground theory required rather than the application of such. The Professional associations call for radical changes in the engineering curriculum and for innovative approaches to vocational training (e.g., [1]). Simulation and Modelling (Dynamics) along with Control are covered in several courses separated along the borders between the traditional engineering disciplines despite the fact that most of the contemporary engineering products are of multidisciplinary nature, the area of mechatronics. 2. Project Dynlab [2] The Pilot Project DynLAB is funded within the Leonardo da Vinci Vocational and Training Programme. The aim is to develop and disseminate a Web-based course on dynamics and control of multidisciplinary engineering systems. The project consortium consists of the following academic and industrial institutions: Computing and Information Centre, Czech Technical University in Prague (Co-ordinator) Automatisierung und Prozessinformatik, Ruhr-Universität, Bochum Institute of Technology Tallaght , Dublin Fraunhofer Institut Integrierte Schaltungen , Dresden University of Sussex, Brighton ABB Automation Control, Västerås The project builds some of the partners’ experience gained in the previous projects, namely RichODL and DynaMit. Outcomes of these two projects initiated establishing two Virtual Action Groups – one of them is focused on Multidisciplinary System Simulation, the other one on Teachware. The Groups are parts of the IEEE Control Systems Society Technical Committee on CACSD [1]. 2.1 Project Application Areas The application area of the course covers two streams. Modelling and Simulation and a course on Control. Modelling and Simulation will include the dynamics of the following topics electrical, electronic and magnetic circuits mechanical and automotive systems electromechanical devices power electronics fluid power and acoustic systems heat-transfer systems energy transducers and sensors vibration and damping systems robots and manipulators mechatronic systems manufacturing machinery vehicles and transportation systems [5] While the control area will cover the typical classical control course excluding Digital Control but including Fuzzy Control. Table 1. Table 1 Control Course Topics [2] Control objectives Basic control structure Open loop vs. feedback Control loop elements Basic Control Elements Modelling aspects Laplace transform Transfer function Freq. Domain Stability Root locus Classical control PID control PZ-Compensators Compensator design State variable techniques Representation forms Transformations Pole placement Observer design LQ control Fuzzy control systems Fuzzy sets Fuzzy logic Fuzzy systems Fuzzy controllers 2.2 Target Groups The consortium sees the main end users being broken up into three significant groups school age children under encouragement from teachers for project work regular college students wishing to complement the traditional face-to-face courses practising engineers in the context of their continuing education or lifelong learning Other possible users connected with these groups would be lecturers/teachers intending to innovate the courses on dynamics and control, providers of continuing and life-long-learning engineering courses, distanceeducation students at different levels of vocational study and training. 2.3 Innovative Aspects of DynLAB There are a number of aspects to DynLAB that differentiates it from the standard course on modelling/simulation or control. The first is the underlying principle of the modelling system that DynLAB is based on. DynLAB will use as its main support “Dynast”, [8] which uses the principle of multipole modelling [3]. Dynast can be used in a number of ways; the simplest which involves no loading of software is to use DynCAD which allows direct use of the solver through the use of a Web browser. The next more comfortable level is to use Dynshell, which provides a more comprehensive working package that can either use a small solver (for small models or simulations) locally or use the full solver remotely via the internet. Dynast has a number of tools associated with it for publishing modelling solutions, which will take the diagrams and the results from the simulations into a single document which can be published in postscript, PDF or HTML formats. Students Computer Web Browser --CORTONA Plugin --CORTONA-Dynast Interface --DynCAD Applet Internet Server Computer Tutor's Computer Dynast Solver Dynast Monitor Dynast Server Internet Dynshell Environment Dynshell Environment LaTeX Convertor to PS, PDF and HTML Matlab/Simulink Figure 1 Dynast Environment for Modelling, Simulation, Virtual Experiments, Publishing and Monitoring. [5] Tools have been provided under DynLAB which will run Virtual Simulation experiments using “Dynast” as the provider of motion solution scripts. Users are provided with simple tools to generate either VRML 3D models of physical systems or dynamic graphical representations of data. These tools are aimed at tutors of the course to provide stimulating visual effects to demonstrate engineering principles or models, Figure 2, but could be easily used by students for project presentations. Figure 2 Slider Crank Mechanism 3D Representation with Dynast User Applet. [2] Two other innovative aspects of using Dynast, first is that it allows automatic generation of system equations based on the schematic representation of the physical system. Thus using the power of the computer, to formulate the equations necessary for analysis. This allows students, with little mathematical background, develop models. The equations are then used to provide solutions. While at the other end of the learning spectrum, students/practising engineers can use Dynast as a toolbox for the Matlab/Simulink software system. This results from the use of multipole diagrams which display an isomorphism between their structure and the geometric configuration of the modeled real systems. [4] In fact, multipole diagrams represent a mapping of real system representation from the geometric onto the topological space. The practical consequence of the isomorphism is that the multipole diagram can be set up in a kit-like fashion in the same way in which the real system is assembled from its subsystems. This modelling procedure can be based on mere inspection of the modelled system. The second is that Dynast is a multidiscipline modelling system that allows the direct integration of different engineering fields within one working environment. This makes it most suitable for modelling electro mechanical or mechatronic systems. 2.4 Learning Environment The DynLAB course is delivered within a web-based learning environment supporting learners’ mutual collaboration and communication with their tutor. Investigative learning is encouraged by open problems and virtual experiments. Self-study is supported by interlacing the course with self-assessed quizzes, tests and other motivation elements. For the remote tutoring mode, there is a collection of tutor-marked assignments in each module. The course is accompanied by a large collection of examples of various problems solved both in academia and industry to imitate knowledge sharing and informal learning typical for large organisations. It is supported by a computer-assisted ontology-based process in which knowledge gained during solution of problems is captured, recorded and later made available to learners ‘just in time’ when it is relevant to the problems they are supposed to solve. The examples can be resolved and modified in an interactive way across the Internet. This gives the learners a hands-on opportunity to acquire the necessary skills in solving real-life problems. The course flexibility is achieved by its modular arrangement with a number of different entry points. In each module, the area and level of prerequisite knowledge as well as the degree of motivation required for its study is clearly specified. Novices are motivated to a more involved engineering investigation of system dynamic behaviour by ‘playing’ with movable 3D virtual-reality models of various systems. They can change the model parameters and excitation while observing the model behaviour not only qualitatively, but also quantitatively using virtual measuring instruments[4]. As an example of such a virtual system, Fig. 2 shows the movable 3D geometric model of a crank and slider with piston. In the next step, students can model, simulate and analyse dynamic behaviour of given systems. For example, sufficiently motivated students with a mechanical engineering background, but of an introductory level only, can start from the module on multipole modelling of linear one-dimensional mechanical systems. From there, they can move to non-linear mechanical systems or to linear electrical and then electro-mechanical systems. The most advanced students would be able to design a control system for given dynamic systems and to verify it. [4] 3. Conclusions Capabilities of the simulation system Dynast [9], available now in a distributed form, have been well proven by many of its academic and industrial users already. Automated analysis of the monthly access to DynLAB server [2] indicates that the system is utilised for solving a large number of problems by people from all over the world each month. Also the Course notes on the DynLAB course will be freely available there. 4. Acknowledgements The authors would like to gratefully acknowledge the support of the Leonardo da Vinci Program of the European Union for the “DynLAB” project. 5. References: [1] Website of the Virtual Action Group for Multidisciplinary System Simulation, a part of the Technical Committee on Computer Aided Control System Design of the IEEE Control Systems Society at http://icosym.cvut.cz/cacsd/dyn/ [2] Website of the DynLAB the Leonardo da Vinci Vocational Training Programme Pilot Project at http://icosym.cvut.cz/dynlab/ [3] Mann, H., “Support for efficient modeling of multi-disciplinary systems”, Proc. of the ASME, DSC-Vol. 67, Nashville 1999. [4] Mann, H, Sevcenko, M. “Internet-Based Collaboration and Learning Environment for Efficient Simulation or Control Design”, Proceedings of the ASME, DSC-Vol. 71 Dynamic Systems and Control Division – 2003 November 15-21 2003 Washington D.C. [5] Mann, H, Sevcenko, M., Course on Dynamics of Multidisciplinary Controlled Systems in a Virtual Lab. 6 th IFAC Symposium on Advances in Control Education, Oulu, Finland June 16-18, 2003 [6] 27 November, 2000 - Woods Launches Steps – Major National Programme of Public Awareness to Boost Recruitment to Engineering Profession Press Release Dept. of Education http://www.education.ie/robots/view.jsp?maincat=10861&category=10861&feature=current_press_releas e&sectionpage=13637&language=EN&doc=13948&link=link001 [7] Report and Recommendations of the Task Force on the Physical Sciences http://www.education.ie/servlet/blobservlet/physical_sciences_report.pdf/ (730KB) 4th September 2002. [8] Dynast, Website for Modelling System http://virtual.cvut.cz/dyn/ [9] Mann H., M. Ševèenko, J. Pavlík. Dynast – modeling toolbox for Matlab formulating equations automatically Proc. 8th Conf. on Matlab 2000, Prague 2000, pp. 416-420.