II. Sructure for practical cases
advertisement

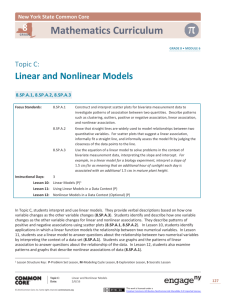
CM 1 Numerical methods for approximation of nonlinear characteristics given by magnetic coils Dan D. Micu, Andrei Ceclan, and Emil Simion Technical University of Cluj-Napoca, Electrical Engineering Department G.Baritu 26, Cluj-Napoca, Romania, e-mail: Dan.Micu@et.utcluj.ro Abstract – The paper tends to issue the importance of approximation characteristics for nonlinear electrical circuit elements. It is created a robust structure for approximating curves with analytical polynomial functions based on numerical methods. Magnetic coil cases are studied as an example. Keywords— numerical methods, nonlinear characteristics, magnetic coils, nonlinear electric circuits I. APPROXIMATION PROCESS Nonlinear circuit elements, as magnetic coils, and nonlinear devices obtained by, take an important place in electrical engineering. The characteristics of nonlinear circuit elements are generally deduced by graphical representation of experimental data. Only exceptionally, and not on the entire domain, the characteristics can be analyticaly established by solving equations, if the approximation process is done on characteristic sections, when the domain is been divided. [1] There are distinguished two situations: the first, on which the nonlinear circuit element characteristics has an analytical expresion resulted on a theoretical basis, the experimental work being done just to determine the coefficients; and the second, on which the characteristics may be obtained only experimentaly. For this last case it is necessary to find a function that best fitts the characteristics of the nonlinear coil, and to determine the coefficients that appear in the analytical expression of the approximating function. Not being stated a general approximation method for experimental nonlinear characteristics, it is necessary to select by repeated tests the best approximating function. Usually, the approximation process is realised with the following types of functions: approximation by polynomial functions, by power functions, by segments, by exponential functions, by trigonometric functions and by transcendent functions. [2] A convenient fitting of the hysteresis cycle for the magnetic coils it is done if the characteristic is splited onto the inferior curve, corresponding to the magnetization process, and the superior curve, corresponding to the demagnetization process. II. For certain per-unit numerical values, for the above mentioned situations, there has been selected to do the approximations a fifth and a ninth order polynomial functions, with initially unknown coefficients: n f ( x) k u k x n5 n9 . k 0 The problem is to identify the coefficients of these functions for each case, when there are no losses, for the first magnetization, and when there are considered the losses and appears the hysteresis, both for the uncontrolled and controlled coil. It is used the numerical calculus program Mathcad and the determination of the coefficients is performed with two numerical methods. The first, by appealing the Mathcad inside function genfit and the second, by using the least square method. Both of these methodes is to be explained. When the experimental points of a characterstic are defined by two vectors Ψ for the flux values, and i for the current values, the genfit function returns a vector of the unkonwn coefficients, calculated from an initial approximation given within a vector u. Thus, the arguments of the called function are as follows: C genfit i u F The fifth order polynomial function deduced for the first magnetization curve in the case of an uncontroled magnetic coil has the expresion: 4 i5 9.76 10 0.677 0.012 1.124 4 5 0.016 1.507 2 3 The fitting process of the characteristic is showed below: SRUCTURE FOR PRACTICAL CASES The present paper concerns on building up a definite structure to a numerical method for approximation of nonlinear characteristics given by magnetic coils. There are studied the simple and controlled coil without and with losses for the analytical function i = f(Ψ). [3] Fig.1. First magnetization without losses If the magnetic flux is: Ψ(t)=Amaxcos(ωt), then, the electrical current for a given 50 Hz frequency, with fundamental and third harmonic component, are presented in figure 2. CM 2 u m ( 0.303 0.209 0.049 0.721 0.092 2.305 0.287 2.99 0.153 0.82 ) u dm ( 0.303 0.209 0.049 0.721 0.092 2.305 0.287 2.99 0.153 0.82 ) Fig.2. Time-dependent current The next case, for the controlled coil and certain data experiments, there are been chosen, beside the fifth order polynomial, also the ninth order polynomial function. In the figure 3 are shown the analytical curves obtained, with the same notations Ψ, i and u. Fig.5. Hysteresis cycle with inferior and superior curve fitting The controlled coil imposes the use of four functions for the approximation, two for magnetization in the first and the third quadrant, and two for demagnetization [5]: Fig.3. Two curve fitting for controlled first magnetization coil The analytical expressions of the functions: 9 8 13 12 i5 4.67 10 1.798 3.58 10 5 8 4 3.37 10 2.915 2 3 3.671 i9 1.02 10 2.401 3.29 10 12.139 5 11 4 11 6 1.66 10 33.859 2.68 10 7 11 ( 40.913) 1.35 10 2 8 17.778 Fig.6. Controlled hysteresis cycle 3 III. 9 For the same expresion of the flux, the time dependent electrical current has the variation in the figure 4. Fig.4. Time-dependent current The least square method consists in defining a functional with the coefficients of approximating function like unknowns: last ( ) It has been created a structure for a numerical model of approximation characteristics of nonlinear circuit elements, like magnetic coils. Irrespective of the numerical data resulted from the experiments, this structure is capable to best fit the selected function with the experiments. The rapid and efficient approximation of characteristics with polynomial functions compete to an optimal design of the applications containing nonlinear elements. The analytical approximation of characteristics and hysteresis, allows the calculation of the induced voltage by coupling coils, within acceptable errors, so as to optimally design coils and transformers. 2 . y u u x u x 2 u x 3 u x 4 3 j 4 j j 0 1 j 2 j j0 u x 5 u x 6 u x 7 u x 8 u x 9 6 j 7 j 8 j 9 j 5 j This functional is partially derived in respect with the coefficients and each derivative equalled with zero. The resulted linear system of equations, solved with an inside Mathcad (Given-Find) numerical method, provides the values of the coefficients. In the case of the hysteresis for the two types of coils, the characteristic is divided onto the superior and the inferior curves. For a ninth order polynomial function the identified coefficients for magnetization, respectively demagnetization and the hysteresis cycle are obtained [4]: G( x y u) CONCLUSIONS IV. [1] [2] [3] [4] [5] REFERENCES K. Nakamura, Analysis of orthogonal- core type linear variable inductor, IEEE Trans on Magnetics, vol 36, pp. 3565-3567, 2000. D. D. Micu, A. Cziker, Aplicatii ale metodelor numerice in Electrotehnica, Editura Casa Cartii de Stiinta, Cluj-Napoca, 2002. P. Corduneanu, A. Baraboi, The possibility to simulate a coil with orthogonal polarized feromagnetic core using EMTP software environement, BP Iasi, EPE, pp. 188- 192, 2004. D. D. Micu, A. Ceclan, E. Simion, Analytical Technical Curve Fitting. Method and Implementation, 6th International Power Systems Conference, Timisoara, pp. 345-348, 2005. E. Simion, A. Ceclan, D. D. Micu, Analytical curve fitting of nonlinear characteristics and hysteresis, XIX Symposium Electromagnetic Phenomena in Nonlinear Circuits, June 28-30, Maribor, Slovenia, 2006 (in course of publication).