4_Walls
advertisement

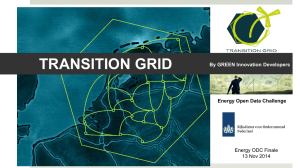
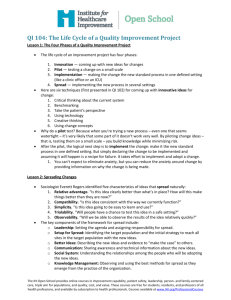
Brownout Situational Awareness Upgrade (BSAU) Development and Integration on the CH-47D and UH-60L Helicopters Major Charles S. Walls IV, Mr. Stephen M. Paris, Mr. John A. Wood, Mr. Nathan Scoggin US Army Aviation Applied Technology Directorate Research Development and Engineering Command (RDECOM) Fort Eustis, Virginia USA Figure 1 Abstract The Aviation Applied Technology Directorate (AATD) located at Fort Eustis, Virginia, in concert with both the CH-47 and UH-60 Program Manager’s Offices in Huntsville, Alabama, designed and integrated a Brownout Situational Awareness system onto the CH-47 and UH-60 helicopters to aid pilots in degraded visual environments due to brownout conditions. The purpose of the effort was to reduce aircraft mishaps and incidents caused by blowing sand which often leads to spatial disorientation during landings in a desert environment. The concept was to develop a “kit” for the aircraft that would generate Embeded GPS/INU symbology onto a cockpit display to allow precise aircraft control without out-the-window visual reference. Both pilot and copilot Horizontal Situational Indicators (HSIs) were replaced with Rockwell Collins Multi Function Displays (MFDs) which contained an HSI page and three BSAU pages as well as several engineering pages which enabled the test pilots to vary damping ratios of each piece of MFD symbology. The symbology set was also evaluated on EFW’s Flat Day HUD display. Testing was initiated in October 2003 and was conducted in four phases. Phase one focused on developing the BSAU symbol set. Phase two was a qualitative assessment of the symbol set. Phase three was actual brownout landing conducted at Yuma Proving Grounds. Phase four was a user assessment of the developed system. Testing was completed in March 2005. Background In recent years many aircraft mishaps during desert operations have been attributed to loss of spatial orientation during brownout landing conditions. When landing in a blowing sand environment, loss of outside visual reference often leads to unintended aircraft drift during landing and/or taking off causing aircraft roll-overs. In an effort to reduce brownout related mishaps, PM Cargo and PM UH joined together in an effort to field a system that would provide situational awareness during brownout landings. The joint PM team brought the Aviation Applied Technology Directorate (AATD) on board to develop, integrate and test a BSAU on both the CH-47D and UH-60L aircraft. Early development focused on integrating MFD displays with the existing aircraft Doppler. Further integration of sensor information from MFD through ANVIS-7 HUD SDC on to EFW Flat Day HUD display allowed for evaluation of symbology set on both the MFD and Day HUD display. It was determined that the Doppler input did not give the fidelity required to drive the symbology precisely enough for operations in a degraded visual environment when landing and taking off. Development then shifted to integrating an EGI onto each aircraft to drive the symbology and provide the accurate acceleration cues to the pilot required for precision low speed operations. Figure 2 shows BSAU system architecture. EGI EGI On/Off Switch 4 to 1 GPS Antenna Splitter ASN-128B Doppler Zeroize Switch 28VDC, 3 A ARINC 575 Circuit Breaker PDP Circuit Breaker PDP ARINC 429 28VDC, 1 A MFD255M Circuit Breaker PDP No. 1 MFD255M ARINC 429 ARINC 429 28VDC, 7.5 A CH-47D New 5 position HUD Switch on Copilot's Thrust Control ARINC 429 HSI Mode Select UH-60 Dual Function GoAround Button 28VDC, 7.5 A CH-47D - New 5 position HUD Switch on Copilot's Thrust Control HSI Mode Select HUD SDC APN-209 RADALT Day HMD VOR Circuit Breaker PDP No. 2 Day HMD UH-60 Dual Function Go-Around Button ASN-43 COMPASS ADF Figure 2 Once integration of the EGI was completed, testing began which focused on optimizing each piece of symbology to find a balance between providing accurate cues and damped enough to prevent pilot induced oscillations. Figure 3 shows the optimized symbology set. Figure 3 Both quantitative and qualitative data was collected to quantify the system characteristics as well as evaluating pilot performance. Data was used toward system qualification. Objectives The objective of this test was to evaluate and demonstrate the functionality of an Interim Brownout Solution system as installed on the CH-47D and UH-60 A/L helicopter by providing a system which: 1. 2. 3. 4. Allowed successful degraded visual environment DVE take-offs and landings Minimized lateral drift and descent rate at touchdown to prevent aircraft damage Prevented spatial disorientation by eliminating pilot induced oscillations (PIO) Allowed controlled approach angle to selected touchdown point Testing and Results General Although both the CH-47D and UH-60 were tested , representative CH-47D data is presented below. Phase I – Qualitative Results Prior to all symbology assessment testing, a functionality/software regression check was conducted by checking each symbol in flight to ensure proper functionality. The Acceleration Cue was assessed for latency and refresh rate by performing step inputs in each flight control axis and qualitatively assessing symbology response. An incremental build-up in control input magnitude, from controls centered to no greater than 2 inches in ¼ inch increments, were conducted. Control fixtures were used using procedures outlined in United States Naval Test Pilot School (USNTPS) Flight Test Manual (FTM) 107. It is important to note that the step inputs were to characterize the symbology response not the aircraft control response therefore maximum rates in a specific control axis were not targeted. Accuracy of the velocity vector, vertical speed indicator, and heading tape was also assessed by comparing symbols with other aircraft systems or fixed visual reference points while conducting the following: low airspeed checks forward, aft, and laterally in 5 knot increments, climbs and descents at 20, 60, 100, and 120 knots at 500 and 1000 feet per minute, and hovering turns at 5, 10, 15, and 20 degrees per second. Data was recorded on hand held data cards, a synchronized video system, an ARINC data recorder, and the Advanced Range Data System (ARDS) data recorder. The ARDS data was considered “truth” data for analysis purposes. Figures 4, 5, and 6 show representative data plots of symbology performance for lateral velocity, vertical velocity, and heading during low airspeed flight, climbs and descents, and hovering turns, respectively. Acceleration is still being evaluated and is not presented below. In figure 4, data indicated that there was no significant latency in lateral velocity between the EGI sensor and MFD/HUD display. Digital ground speed readout on each display, the Doppler digital groundspeed readout, and the velocity vector symbology presentation correlated. Lateral velocity was assessed as accurate. Figure 4 Lateral Velocity Correlation In figure 5, data indicates that there was no significant latency in vertical velocity between the EGI sensor and MFD/HUD display. Vertical velocity was assessed as accurate. Figure 5 Vertical Velocity Correlation In figure 6, data indicates that there was no significant latency in yaw rate between the EGI sensor and MFD/HUD display. Yaw rate was assessed as accurate. Figure 6 Yaw Rate Correlation In figure 7, the resultant of longitudinal and lateral position drift from a known hover point is displayed and data indicates that there was no significant latency in position between the EGI sensor and MFD/HUD display. Position information was assessed as accurate. Figure 7 Hover Point Drift Correlation Phase II – Qualitative Results Phase two focused on assessing the pilot’s ability to perform specific maneuvers while flying with symbology only to simulate brown-out conditions. Maneuvers were selected from ADS-33E as well as the CH-47D Aircrew Training Manual and modified where appropriate to make pertinent to brownout environments. Three subject experimental test pilots flew maneuvers from the co-pilot station with the cockpit field-of-view obstructed by card board over the co-pilot windshield and chin bubble, forcing the subject pilot to fly using the symbology only. A safety pilot, with an unobstructed field-of-view, occupied the pilot station. Handling Qualities Ratings (HQRs) were assigned by each test pilot IAW the procedures contain in the USNTPS FTM 107 following each maneuver to characterize the resultant aircraft handling qualities when flying a specific system. The Visual Cue Ratings (VCR) were determined to be “Good” as defined in ADS-33E in that the displayed symbology provided cues which enabled the pilot to make aggressive and precise corrections with confidence. The safety pilot determined if desired or adequate performance criteria was met using visual ground reference points. Maneuvers were selected to represent what is reasonably expected for a pilot to perform while, landing, taking off, or recovery from a brown-out condition as well as to force the pilot to use/evaluate each symbol in the symbology set. The maneuver set was flown with the MFD being driven by the EGI, the HUD being driven by the EGI, the MFD at heavier gross weights, and the MFD with the EGI in a degraded mode (GPS signal removed). A baseline target aircraft gross weight of 32,500 pounds was flown, and heavier gross weights of 40,000 and 48,000 pounds were assessed (spot checked) to ensure that the heavier aircraft gross weights did not noticeably affect symbology performance due to changed aircraft handling qualities. Overall, the displays provided visual cueing, which allowed pilots to obtain level 2 handling qualities. It was noted that there was little change in pilot performance between displays (MFD or Flat Day HUD) or while in the “degraded” mode of operation. Pilot performance did improve as pilot’s gained experience flying the symbol set. The maneuvers flight tested were: Hover Landing (from hover) Hovering Turn Vertical Maneuver Lateral Brownout Lateral Recovery Slope Landing Takeoff Approach Go Around Table 1 contains the participating test pilot’s experience level. Table 1 Pilot Experience Pilot Total Flight Hours CH-47D Hours 1 2 3 1700 3500 3100 100 200 2300 HUD/Symbology Hours 50 800 500 Table 2 contains the HQRs from phase 2 testing for MFD and Flat Day HUD at light, medium, and heavy gross weight configurations and in fully operational as well as degraded sensor modes. Table 2 Phase 2 Handling Qualities Ratings Pilot Hover 1 2 3 Avg. 5 5 5 5 Hover 1 2 Avg. 5 5 5 Hover Medium Heavy 4 5 Landing (hover) 5 4 3.5 4.1 Hover Turn Landing (hover) 4 4 4 Hover Turn Landing (hover) 4 4 5 5 5 5 6 5 5.5 MFD Degraded/INU Only Vertical Slope Takeoff(1) Man Norm/ITO 6 ---4/5 5 4.5 4/5 5.5 4.5 4/5 Landing Go-Around 5 5 4 4.6 5 4 3 4 Landing Go-Around 5 5 5 5 4.5 4.75 MFD/Full Up Medium and Heavy Weight (Pilot 2) Hover Turn Vertical Slope Takeoff(1) Landing Man Norm/ITO 5 5 6 4/5 5 4.5 5 5 5/4 4 Phase 2 HQRs HUD/Full Up Landing Hover Turn Vertical Slope Takeoff (1) (hover) Man Norm/ITO 5 4.5 5.5 6 4.5 5/4 5 4 4 5.5 4.5 4/4 5 4 6 6 7.5 4/4 5 4.2 5.2 5.8 5.5 4.3/4 Notes: (1) Normal Takeoff and Instrument Takeoff. Hover 1 2 3 Avg. MFD/Full Up Vertical Slope Takeoff(1) Man Norm/ITO 5 6 4/5 5 5 3/5 5 4 4/4 5 5 3.6/4.6 Go-Around 5 4 Landing Go-Around 5 4 5.5 4.8 4 5 4 4.3 Lateral Recovery 5 4 4 4.3 Lateral Recovery 5 5 5 Lateral Recovery 4 5 Lateral Recovery 4 5 5 4.6 Maneuvers Flown During Phase II Hover- Altitude control drove the HQRs for the hover task. Very small thrust control inputs, +/- 1/16 inch, resulted in large altitude changes, +/- 5 feet, which made precise altitude control difficult. The difficulty in altitude maintenance was most likely due to the large aircraft power margin which increases thrust sensitivity. Although the aircraft altitude hold was not used during the evaluation portion of testing, radar altitude hold reduced pilot workload during practice hover tasks. It was also helpful to leave the trust control trim engaged and use pressure/counter pressure against the trim to prevent larger than desired altitude changes when hovering. Generally, adequate performance was obtained requiring considerable pilot compensation. One finding was that pilots use radar altitude hold during hover tasks in brownout environments to reduce pilot workload and reduce the chances of spatial disorientation. Also, it was noted that pilots should leave the thrust control trim engaged when hovering in a brownout environment and use pressure/counter pressure against the trim to prevent larger than desired altitude changes. Landing from a hover- Rate of descent control and position maintenance drove the HQRs for the “landing from a hover” task. It was helpful to touchdown with slight forward movement to aid in preventing aircraft lateral drift. Generally, desired performance was obtained requiring moderate pilot compensation. One finding was that pilots leave the thrust control trim engaged and use pressure/counter pressure against the trim to prevent larger than desired altitude changes when hovering. Another finding was that aircraft touchdown with slight forward movement will aid in preventing lateral drift when landing from a hover. Hover Turn- Altitude maintenance drove the HQRs for the hover turn task. Very small thrust control inputs, +/- 1/16 inch, resulted in large altitude changes, +/- 5 feet, which made precise altitude control difficult. The increased pilot compensation for altitude control can be attributed to the large aircraft power margin, as stated in the “hover” paragraph above. Generally, adequate performance was obtained requiring considerable pilot compensation. It was noted that pilots should leave the trust control trim engaged and use pressure/counter pressure against the trim to prevent larger than desired altitude changes when hovering. Vertical Maneuver- Altitude capture and rate of ascent/descent control drove the HQRs for the vertical maneuver task. Due to the required altitude change for this maneuver, the difficulty in maintaining rates of ascent and descent and capturing target altitude were exacerbated by predicting when to adjust thrust control inputs. Small thrust control inputs during ascent/descent to arrest the ascent/descent resulted in capturing the targeted altitude , +/- 5 to 7 feet. Generally, adequate performance was obtained requiring considerable pilot compensation. Sloped Landings- Rate of descent control and position maintenance drove the HQRs for the “landing from a hover” task on sloped terrain. The increased pilot compensation for rate of descent control can be attributed to the large aircraft power margin, as stated in the “hover” paragraph above. The resultant rate of descent from a given power reduction was non-repeatable, often resulting in unpredictable aircraft to ground contact. The unpredictable ground contact coupled with lateral drift resulting from difficulty in maintaining position will result in uncommanded roll deviations upon ground contact which could lead to increased chances aircraft rollover during slope operations. One finding was that slope landings no greater than 5 degrees should be attempted when flying aircraft with the symbology as the sole reference source. Takeoffs- Standard takeoffs and instrument takeoffs (ITO) were performed. Lateral drift drove the HQRs for the takeoffs. Generally, desired performance was obtained requiring moderate pilot compensation. Landings- Landings to a specific landing area using the symbolgy as the sole reference required training which ranged from 2 to 4 hours. It was determined that the technique of initiating the approach from 50 feet and 35 to 40 knots ground speed allowed for the most controlled approach to landing. Generally, desired performance was obtained requiring moderate pilot compensation. One finding was that initiating approaches from 50 feet and 35 to 40 knots ground speed. Another finding was that the Directorate of Evaluations and Standards (DES) determine how much training is adequate for pilots to safely conduct landings using the BSAU. Go Around- Generally, desired performance was obtained requiring moderate pilot compensation. Lateral Recovery- The lateral recovery maneuver was evaluated to simulate recovery from spatial disorientation during brownout conditions. Large lateral control inputs, +/- 1/2 inch, to arrest lateral velocity and capture a hover point resulted in small lateral position changes, +/- 5 feet, which made precise position capture difficult Generally, desired performance was obtained requiring moderate pilot compensation. Phase III- Qualitative Results Phase three focused on performing actual brown-out landings and takeoffs to determine the effects of blowing sand on aircraft systems which drive symbology. The cockpit was in a mission representative configuration, no black-out card board. The landings and takeoffs were conducted by two experimental test pilots during day, night, and while wearing NVGs. NVG compatibility of the MFD-255 was also as well as Human Factors (HFE) considerations were also assessed. (1) Actual Brownout Landings- A total of 20 actual brownout landings were conducted at Yuma Proving Grounds, AZ using the MFD, Day HUD and NVG HUD during both day and night VMC. Three separate pilots performed the brownout takeoffs and landings. It was noted that the symbology of the Day HUD was not bright enough during bright sunlight conditions. The Day HUD display was made brighter following Phase III testing and was assessed as bright enough to provide adequate cues during bright sunlight conditions. There were no other system anomalies noted during the takeoffs and landings. One go-around was performed during the test due to excessive lateral drift just prior to touchdown. The lateral drift was noted and announced by the safety pilot at which time the pilot flying the aircraft made a successful go-around. Aircrew coordination aided in successful takeoffs and landing by having the flight engineer announce when the dust cloud was at the tail of the aircraft and having the pilot not on the controls calling out airspeed, altitude, vertical speed and lateral drift. The pilot flying the aircraft transitioned to the symbology when the flight engineer announced “dust cloud at the tail” which gave the flying pilot time to establish a MFD cross-check prior to entering the dust cloud. All other internal aircraft communication was kept to a minimum to enable prompt communication between the pilot on the controls and the safety pilot who was monitoring aircraft conditions via the MFD. Figure 5 and 6 displays photo documentation of the brownout landings for CH-47D and UH-60L, respectively. Figure 5 CH-47D Brownout Landing Sequence Figure 6 UH-60 L Brownout Landing Sequence (2) NVG Compatibility and HFE Considerations- The NVG compatibility and HFE assessment was an ongoing qualitative pilot evaluation as well as a quantitative evaluation conducted by Dr. Bill McLean from USAARL and Dr. Tom Frezell from USAATTC. The quantitative assessment was conducted after nautical twilight at the Mid-East test course at Yuma Proving Ground, Arizona. Following the culmination of the flight/qualitative portion of the assessment, the CH-47, serial number 87-70077, was parked at Laguna Army Airfield away from artificial lighting sources. The MFD was evaluated using both photopic photometrics and ANVIS radiance to determine if there were significant differences between the brown-out display and other illuminated crewstation displays and controls. A subjective evaluation was also conducted to determine display readability under “dark” conditions. A Minolta LS-100 photometer was utilized to measure photopic luminance of the electronic brown-out display and other nearby light displays to determine display balance between the various displays. The Minolta photometer was then modified utilizing an adapter and a PVS-14 NVIS intensifier tube in order to measure NVIS radiance of various lighted controls and displays. The obtained values were then compared with each other to determine if substantial differences existed. Pilots that flew the modified CH-47 were asked for their comments on the legibility and display brightness of the electronic brownout display immediately after their unaided and aided night flights. A color-balanced light source was utilized to illuminate the electronic display to 10,000 foot-candles in order to evaluate daylight readability. Photopic measurements of the brown-out display indicated that it was well-balanced with other crewstation flight displays (attitude indicator, vertical speed indicator, heading indicator). NVIS radiance measures provided fairly uniform readings except in the case of the “transmission oil pressure selector switch” and the “transmission oil temperature selector switch.” These selector switches were 10 times brighter (NVIS radiance) than any other flight displays or controls. Several of the pilots indicated that the brightness of the transmission oil temperature/oil pressure scan switches were quite noticeable and distracting and should be reduced for ANVIS flight. The brown-out display was considered to be NVIS acceptable and did not produce any “blooming” in the pilot’s ANVIS when viewed directly through the ANVIS (cockpit displays are not viewed through the ANVIS by the pilots but are viewed under the ANVIS). The tested electronic display did not produce any visible windscreen reflections. The brown-out display was considered legible during all flight conditions (day and night) and was readable under 10,000 foot-candles direct illumination. Conclusion The developed symbol set displayed on the MFD and HUD enabled the pilot to conduct brownout takeoffs and landings and is satisfactory. It was noted that increased time flying the symbology resulted in better performance of each test pilot. One finding is that the Directorate of Evaluations and Standards (DES) determine how much training is adequate for pilots to safely use the BSAU as well as develop specific procedures required for executing brownout landings. The following procedures were used during BSAU testing to execute successful landings : 1. 2. 3. 4. 5. 6. 7. 8. Ensure all windows and doors are closed Initiate approach at 50 Feet AGL and from 40 to 35 knots ground speed. Pilot on the controls establish a descent and deceleration aiming for the intended point of touchdown. Flight Engineer makes a “dust at the tail “call and any other lateral drift call which he determines to be excessive. Pilot on the controls transitions to the MFD/HUD when the “dust at the tail” call is made. The non flying pilot monitors MFD and calls excessive deviations in airspeed, rate of descent, or lateral drift. Any crewmember calls for a go-around should excessive lateral drift or rate of descent develop. Aircrew communication should be kept to a minimum so that only critical calls can be communicated by any crewmember. Although symbol set displayed on both MFD and Day HUD provided adequate cues, the Day HUD reliability became questionable in that all of the 8 Day HUDs supplied for testing failed during testing. Findings show that improvement of reliability of the Day HUD is required. Major Charles S. Walls IV and Mr. Stephen M. Paris, Mr. John A. Wood, are experimental test pilots at the Aviation Applied Technology Directorate (AATD) of the Research Development and Engineering Command (RDECOM) at Ft Eustis. Virginia. Mr. Nathan Scoggin (USNTPS Class 120) is an electrical engineer and flight test engineer at AATD.