The partitioning of a multiprocessor program over multiple
advertisement

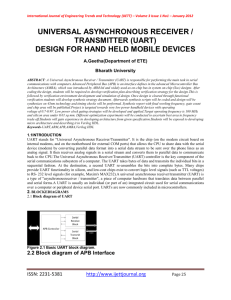
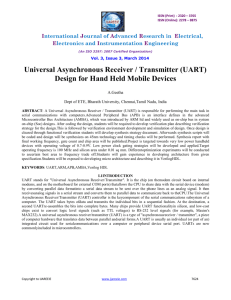
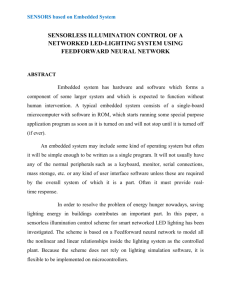
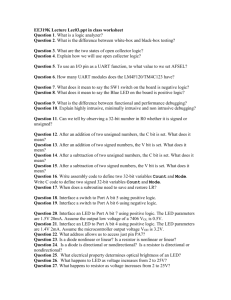
ZigBee Smart Sensors Networks Claudiu Lung, Sebastian Sabou, Ioan Orha Andrei Buchman Electronic and Computer Engineering Department North University of Baia Mare Baia Mare, Romania claudiu.lung@ubm.ro Basis of Electronics Department Tehnical University of Cluj Napoca Cluj Napoca, Romania Abstract— The main goal of this project is to implement a multiprocessor system, which is able to control multiple wireless ZigBee networks. Multi-processor architectures have gained interest recently because of their ability to exploit programmable silicon parallelism at acceptable power-efficiency figures. Despite the potential benefit they offer over single-processor architectures, it is unresolved how one can write compact and efficient programs for multiple parallel cores. In this paper, we propose the use of a synchronous hardware description language to program a network of small PicoBlaze processors [1]. describes the behavior of the logic circuit rather than writing traditional Boolean logic equations. Computer-aided design tools are used both to simulate the VHDL or Verilog design and to synthesize the design to actual hardware. The programmable logic circuits come to meet the demands mentioned above, allowing the implementation of both the control algorithms and the other auxiliary functions on a single chip, at high speeds, all operations being carried out in hardware. Another advantage brought by the programmable logic circuits is the short development time. This result in a fast time to market. Keywords: FPGA, ZigBee, PicoBlaze I. INTRODUCTION While parallel cores have been hailed as the next big step in computer micro-architecture development, it has not been obvious how to write efficient programs for multiprocessors. The sequential programming model of a single core is unable to address multiple cores at once. Designers therefore have to make use of programming extensions such as threads and message passing libraries, which quickly become cumbersome to use. In addition, a systematic transformation of a sequential program in C to a parallel program that can run on multiple cores is unknown, and it remains a highly skilled design activity. We therefore looked at the use of a hardware description language as a means to program multiple cores. The advantage is that a hardware description language is inherently parallel. The mapping problem from specification to architecture thus does not require the detection of parallelism, but it rather does require an efficient sequentialization. In this paper, we will show a feasible solution for this problem. Hardware description languages are often associated with a low level of abstraction, unsuited for programming activities. A major revolution in digital design has taken place over the past decade. Field programmable gate arrays (FPGAs) can now contain over a million equivalent logic gates and tens of thousands of flip-flops. Today, digital systems are designed by writing software in the form of hardware description languages (HDLs). The most common HDLs used today are VHDL and Verilog. Both are in widespread use. When using these hardware description languages the designer typically II. IMPLEMENTATION More and more often we need powerful computer architectures to solve complex problems for short period of time. From economy point of view it is less expensive to take a dozen of processing cores working together than one stand alone and state of the art high performance processor. So it is a challenge to design hardware architecture and implement algorithms in software for multiprocessor systems. Currently we can see the nascence of multiprocessor cores combined in a single chip. Thereby higher performance can be achieved with lower frequency. The partitioning of a multiprocessor program over multiple cores is straightforward because the input specification is fully parallel. A systematic transformation process converts the parallel input specification into concurrent PicoBlaze programs. Proposed parallel architecture consists of up to four PicoBlaze soft-core, which are supported free by Xilinx and makes them to run a parallel algorithm. PicoBlaze is chosen because it is compact, capable, and cost effective fully embedded 8-bit RISC microcontroller core optimized for several Xilinx FPGA families – Spartan 3, Virtex 2 and Virtex 2-Pro. Compared to other microcontrollers it is extremely flexible. Its basic functionality can be easy extended by connecting additional FPGA logic to its input/output ports [2]. Spartan-3 has adopted the 18Kbit Block RAM elements previously seen in the Virtex-II devices. This enables KCPSM3 to support programs up to 1024 locations which overcomes the most commonly encountered limit of KCPSM with SpartanII(E). PicoBlaze supports a program up to a length of 1024 instructions utilizing one block memory. Requirements for larger program space are typically addressed by using multiple KCPSM3 processors each with an associated block memory to distribute the various system tasks. The microcontroller effectively has 256 input ports and 256 output ports. The port being accessed is indicated by an 8bit address value provided on the ‘PORT_ID’. The port address can be specified in the program as an absolute value (pp), or may be indirectly specified as the contents of any of the 16 registers ( (sY) ). During an ‘INPUT’ operation the value provided at the input port is transferred into any of the 16 registers. An input operation is indicated by a pulse being output on the READ_STROBE. It is not always necessary to use this signal in the input interface logic, but it can be useful to indicate that data has been acquired by the processor. During an ‘OUTPUT’, the contents of any of the 16 registers are transferred to the output port. An output operation is indicated by a pulse being output on the WRITE_STROBE. This strobe signal will be used by the interface logic to ensure that only valid data is passed to external systems. Typically, WRITE_STROBE will be used as a clock enable or write enable. Figure 1. PicoBlaze internal structure A Universal Asynchronous Receiver Transmitter (UART) component is used to convert serial data to parallel data, and parallel data to serial data. A UART is extremely useful when dealing with serial input and output between a gate array and another component. The serial data transferred into the UART is placed on an output bus after the UART converts it into parallel information [3]. A UART is extremely useful when dealing with serial input and output between a gate array and another component. The serial data transferred into the UART is placed on an output bus after the UART converts it into parallel information. This bus can then be used as input to other logic in the gate array. The resulting data can then be sent back out serially by using the UART again. The UART component includes two main functions: parallel to serial conversion, and serial to parallel conversion. The receiving portion of the UART handles the serial to parallel conversion, while the transmitting portion of the UART handles the parallel to serial conversion. The UART has two main functional blocks that can be thought of as two separate circuits packaged in one component. The UART includes a circuit for receiving serial information, and a circuit for transmitting serial information. The receiver takes in a byte of serial data transmitted to the RXD port, and converts it into one byte of parallel information. This byte is then placed on the DBOUT port. The transmitter takes a byte of parallel information found on the DBIN port, and converts it into a byte of serially transmitted data. This data is transmitted on the TXD port. The UART separated into its two circuits can be seen in Figure 2 . Figure 2. Receiver and Transmitter circuits. Port_selector block, written in VHDL, allows the selection of any 8-bit port of the 256 of ports that PicoBlaze microcontroller can access depending on the address generated. This block put in value the microcontroller’s ability to access a large number of ports on 8 bits. The timing of data transfer is done with WRITE_STROBE signal on the ascending front of clock signal [2]. Figure 2. Figure 3. Main module implementation The main module act like a smart sensor from network and the initiator of ZigBee network. Main modules, implemented with PicoBlaze microcontroller, sends serial data to Zigbee Coordinators and sent them over wireless connections to the second control modules witch filter information and sent a ACK respond to coordinators. The functionality of the MAIN module is give by the PicoBlaze microcontroller. Program is stored on ROM block, generated from the .PSM file. First are set some constants and renamed some internal registers to understand much better the program, easy upgrade and service. Next are displayed some important parameters of the radio communication connection. In this part of the program are initialized this parameters for start-up reasons. Initialization parameter are sent to the Zigbee module over the serial port, and displayed on the LCD. At the first start, of each coordinator device, perform a complete scanning of all available channels, from 11 to 26 and create a network upon the most noise-free channel. This network will characterized by a 14 bit identifier (PAN ID) alike to 14 LSB of coordinator MAC address, and alterable by proper command. At the network creation, coordinator choose, through an algorithm of randomly number generator, 128 bit key of data encryption. When a remote device, Router or End Device, will be started for the first time, it will perform a scanning upon all channels, without any constraint, a network whose join in. When a remote device had been joined, a Short address (16 bit) will be awarded to it, and this is the way the network packets are addressed. The Short address will be the same for Routers, unless a device reset will perform. The End Device changes its Short address according to the joined Router (called “Father”). So If the End device leaves the radio field range of its “Father”, and join another Router, the Short address surely change. At the same time if it’s Father will be turned off, and the End Device will found another router to join in, a new Short address will award to it [4]. III. EXPERIMENTAL RESULTS Regardless of the particular physical synthesis flow chosen, the steps required to translate the VHDL or EDIF output from an RTL synthesis software program into a physically downloadable bit file are essentially the same and are listed below: 1. Translate 2. Map 3. Place 4. Route 5. Generate accurate timing models and reports 6. Create binary files for download to device Checking the proper functionality of the circuit was made, in first step by simulation, with ISE Simulator included in programs package, dedicated for programmable logic circuits implementations. To achieve simulations was necessary to generate a test bench file type, which must check all situations that may arise in case of a real circuit [5]. Figure 4. Project flow In practice, the test bench is simply a VHDL model that generates the required stimuli and checks the responses. This can be in such a way that the designer can view the waveforms and manually check them, or by using VHDL constructs to check the design responses automatically.[5] Synthesis is the key stage between high-level design and the physical place and route which is the final product of the design flow. There are several different types of synthesis ranging from behavioral, to RTL and finally physical synthesis [5]. Figure 5. Synthesis flow Experimental platform, which is presented in figure 6, is developed by using Spartan 3E Starter Board, four Coordinator ZigBee Modules and four Router ZigBee Modules. Main module control all four ZigBee networks, each network is made from one Coordinator module and one Router module. Each wireless sensor is connected to solar panel which is power supply. Figure 7. Data read from wireless sensors connected to network. Main module reads data from all four networks and displays them on LCD. In this stage of project development, temperature and battery voltage are read from each wireless sensor. IV. The application presented and performed, is a component within a wider project, which proposes the creation of a dedicated system implemented with intelligent programmable logical circuits that will apply in assistance to persons with disabilities. Further development of the project involves: Implementation of an algorithm for transmission of data relating to the vital functions of patient on a regular basis, for records on the evolution of the health status of the patient and preventing an imbalance. REFERENCES [1] Pengyuan Yu, Patrick Schaumont, " Executing hardware as parallel software for PicoBlaze networks", http://rijndael.ece.vt.edu/schaum/papers/2006fpl.pdf [2] KCPSM3_Manual.pdf , www.xilinx.com [3] ***, UART Component.pdf, www.digilentinc.com [4] [5] Figure 6. Experimental platform CONCLUSION http://radio.ubm.ro/EA/Documente/ZigBee/command-manualusers.pdf Design recipes for FPGAs.pdf