Beno_Tech
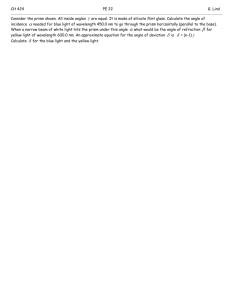
advertisement

GEOMETRICAL EFFECTS ON STEERING FORCES HPV 2000 – Land Speed Record VEEHHIICCLLEE DYYNNAAM MIIC CSS TEECCHHNNIICCAALL COONNTTRRIIBBUUTTIIOONN SPRING 2000 JOSHUA L. BENO The forces and moments acting on the steering system of any vehicle come from the tire-road interface. So, how does the geometry of the HPV steering system effect these forces that the rider must respond to? We first need to consider what geometry is being discussed. Secondly, we need to look at these forces and moments and the factors that effect them. Third the 1999 CSU HPV “Two Timer” and the new chassis for 2000 will be analyzed and compared. There are several angles and distances that can effect steering and handling. Caster Angle Kingpin Inclination Angle Camber Angle Toe-in Kingpin Offset Scrub Offset Other factors include: Steer Angle Speed Turning Radius Tire Radius Tire Pressure Center of Gravity Location The caster angle is the angle in side elevation between the steering axis, and the vertical. This can be seen in Figure 1. Figure 1 The kingpin inclination angle is the angle in front elevation between the steering axis and the vertical as seen in Figure 2. Figure 2 The camber angle is the inclination of the wheel plane to the vertical (Figure 3). Figure 3 The toe angle of a wheel is the angle between a longitudinal axis of the vehicle and the line of intersection of the wheel plane and the road surface (Figure 4). Figure 4 Kingpin offset at the ground is the horizontal distance in front elevation between the point where the steering axis intersects the ground and the center of tire contact. Please refer to Figure 5. Figure 5 The scrub or caster offset is the distance in side elevation between the point of intersection of the steering axis and the ground, and the center of tire contact (Figure 6). Figure 6 The steer angle is the angle between the projection of a longitudinal axis of the vehicle and the line of intersection of the wheel plane and the road surface (Figure 7). Figure 7 The speed is the forward velocity of the vehicle. The turning radius is the radius of the turn encountered in steering. The tire radius is the distance from the wheel center to the center of tire contact. This is usually approximated by half the wheel diameter. Tire pressure is the inflation level of the tires usually in PSI. The center of gravity location refers to the positioning of the combined center of gravity of the rider and the vehicle. The vertical height of the center of gravity and its position along the longitudinal axis (measured from the rear wheel center) of the vehicle are both important. The forces and moments to be considered can be seen in Figure 8 below. The rolling resistance moment and the overturning moment seen below have little effect on the steering system and will not be considered. Figure 8 These forces and moments and their effect on the steering system are examined in tables 1-5. After these tables the steering forces on the 1999 CSU HPV “Two Timer” and the 2000 CSU HPV chassis will be examined. Moment from Fz Normal Force Fz Percentage of Weight MV Moment from -(Fzl+Fzr)d*sin()sin() Moment from (Fzl-Fzr)d*sin()cos() on Wheel + Moments on left and right in opposite direction. Caster Angle ( ) + Moments on both wheels act together to produce a centering Kingpin Inclination Angle () moment Both sides of the vehicle lift Kingpin Offset at Ground (d) + + Imbalances result in steering pull. Speed Moment depends on lateral acceleration level. (V) + - Turning Radius (R) + - Steering Angle ( ) + Increases Torque. CGz + CGx Increases portion of weight on front steering wheels. Table 1. Lateral Force Fy Moment from Fy ML (Fyl+Fyr)r*tan() 2 Mass*(V) /R + Scrub Offset With positive caster produces a moment attempting to steer the vehicle out of the turn. (s) + Caster Angle ( ) + Speed (V) Turning Radius (R) * Steering Angle ( ) + Tire Radius r Table 2. Tractive Force Fx Moment from Fx MT (Fxl-Fxr)d For steered wheels Rolling resistance force * Kingpin Inclination Angle () Moments are opposite in direction. Imbalances produce steering moment. Kingpin Offset at Ground (d) + + Camber Increases Rolling Resistance Toe-In Increases Rolling Resistance Tire Pressure Decreases Rolling Reesistance + - + CGx Increases portion of weight on front steering wheels. Table 3. Aligning Torque Mz Moment from Mz MAT Caster Angle ( ) (Fy*Lc)/6 (Mzl+Mzr)cos(( + ) ) This is assuming the force on the tire acts over a triangular area - 2 2 1/2 Resists any turning motion. This has a centering effect. Both caster and kingpin angles decrease the moment. Kingpin Inclination Angle () + Speed (V) Increases lateral force. Turning Radius (R) Decreases lateral force. Tire Pressure Decreases contact patch length (Lc). - - Table 4. The Two Timer’s geometry and dimensions are listed as follows: Caster Angle = 19o Kingpin Inclination Angle = 22 o Camber Angle = -9 o Toe-in ~ 5 o Kingpin Offset = 2 in. Scrub Offset = 3.5 in. Tire Radius = 10 in. Tire Pressure ~ 85 psi. Length of Contact Patch = 2 in. CGz = 17 in. CGx = 25 in. Wheel Base = 40 in. Mass = 200 lb. Coefficient of Rolling Resistance = 0.013 We will consider a turn at these conditions: Steer Angle = 10 o Speed = 20 mph. Turning Radius = 30 ft. The calculations of the steering forces and moments can be seen on the following two pages. Calculations of Steering Moments for the Two Timer. Caster Angle 19 deg Kingpin Angle 22 deg Wheelbase Camber Angle c 9 deg Toe-In t 5 deg Mass Kingpin Offset d 2 in Scrub Offset s 3.5 in CG Height Tire Radius r 10 in Tire Pressure p 85 psi CG Longitudinal Steer Angle 10 deg Speed V 20 mph Turn Radius Rolling Resistance Cr 0.013 Length of Contact Patch Lc 2 in Assume (1/2) of total wieght on left wheel and (1/6) on right wheel Normal Force M l M 2 W l M l g M M l 45.359 kg M r W l 444.822 N W r M r g M r 15.12 kg 6 W r 148.274 N Moment from M W l W r d sin sin M 1.96 N m Moment from M W l W r d sin sin M V M M M 0.852 N m M V 1.108 N m M V 9.809 in lbf Lateral Force 2 Fyl M l V R 2 Fyl 396.536 N M L Fyl Fyr r tan Fyr M r V R M L 46.241 N m Fyr 132.179 N M L 409.267 in lbf W B 40 in M 200 lb CGz 17 in CGx 25 in R 30 ft Tractive Force Fxl Cr W l Fxl 5.783 N M T Fxl Fxr d Fxr Cr W r M T 0.196 N m Fxr 1.928 N M T 1.733 in lbf Aligning Moment M zl Fyl Lc 6 M zl 3.357 N m M AT M zl M zr cos 2 2 M zr Fyr Lc 6 M AT 3.913 N m M zr 1.119 N m M AT 34.629 in lbf Sum of Moments M M V M L M T M AT M 49.241 N m Two Timer Steering System (See Figure 9) Length of steering arm La 8 in Force required by each arm of the rider to resist steering moment. Fr M 2 La Fr 121.164 N Fr 27.239 lbf M 435.821 in lbf The 2000 chassis’ geometry and dimensions are listed as follows: Caster Angle = 6o Kingpin Inclination Angle = 17.5 o Camber Angle = 0 o Toe-in ~ 0 o Kingpin Offset = 0 in. Scrub Offset = 1.5 in. Tire Radius = 10 in. Tire Pressure ~ 100 psi. Length of Contact Patch = 1.5 in. CGz = 23 in. CGx = 36 in. Wheel Base = 50 in. Mass = 200 lb. Coefficient of Rolling Resistance = 0.013 We will consider a turn at these conditions: Steer Angle = 10 o Speed = 20 mph. Turning Radius = 30 ft. The calculations of the steering forces and moments can be seen on the following two pages. Calculations of Steering Moments for the 2000 HPV prototype Chassis. Caster Angle 6 deg Kingpin Angle 17.5 deg Wheelbase W B 50 in Camber Angle c 0 deg Toe-In t 0 deg Mass M 216 lb Kingpin Offset d 0 in Scrub Offset s 1.5 in CG Height Tire Radius r 10 in Tire Pressure p 100 psi CG Longitudinal CGx 36.1 in V 20 mph Turn Radius 10 deg Steer Angle Rolling Resistance Cr 0.0077 Speed Length of Contact Patch Lc 1.5 in Assume (1/2) of total wieght on left wheel and (1/6) on right wheel Normal Force M l M 2 W l M l g M M l 48.988 kg M r W l 480.408 N W r M r g M r 16.329 kg 6 W r 160.136 N Moment from M W l W r d sin sin M 0 N m Moment from M W l W r d sin sin M V M M M V 0 N m M 0 N m M V 0 in lbf Lateral Force 2 Fyl M l V R 2 Fyl 428.259 N M L Fyl Fyr r tan Fyr M r V R M L 15.244 N m Fyr 142.753 N M L 134.921 in lbf CGz 23.32 in R 30 ft Tractive Force Fxl Cr W l Fxl 3.699 N M T Fxl Fxr d Fxr Cr W r M T 0 N m Fxr 1.233 N M T 0 in lbf Aligning Moment M zl Fyl Lc 6 M zl 2.719 N m M AT M zl M zr cos 2 M zr Fyr 2 Lc M zr 0.906 N m 6 M AT 3.439 N m M AT 30.434 in lbf Sum of Moments M M V M L M T M AT M 18.683 N m M 165.354 in lbf HPV 2000 Steering System (See Figure 10) Length of Handle from top to steer rod L1 .1905 m L1 7.5 in Length from pivot to steer rod L2 .0254 m L2 1 in Length of Handle Larm .2159 m Larm 8.5 in Length of Steering Arm L3 .0762 m L3 3 in Force required by each arm of the rider to resist steering moment. M L2 2 L3 Larm FR 1 FR 14.422 N FR 3.242 lbf Below we see the steering mechanisms for the two vehicles: Steering Diagram for 1999 Two Timer. L arm Figure 9 Steering Diagram for 2000 Chassis L1 L arm L3 L2 Pivot Figure 10 The 2000 Chassis employs a lever to add mechanical advantage to the steering system. This lowers the arm force required by the rider as seen in the calculations. So we see that the moment generated by the action of steering is greatly reduced on the 2000 Chassis. This is due to the zeroing of the Camber angle, Toe-in, and kingpin offset. It is apparent that these are important values to consider when designing a vehicle. By accounting for the forces encountered in riding a more responsive and better performing vehicle can be designed. But, does the 2000 Chassis actually ride better? Yes it does. The steering is smooth and responsive. It is easy to control and steer. Let’s summarize the conclusions concerning steering geometry: Caster Angle is important for returning the vehicle to a centered position. However, a large amount should not be necessary. A value between 5 and 10 degrees is good. Kingpin Inclination Angle produces a centering moment with the normal force. Its value should be determined in order to make the Kingpin Offset zero. This will vary from vehicle to vehicle. Excessive Camber Angle can increase rolling resistance and should be avoided. A good value to design for is zero degrees without a rider. Toe-in also increases rolling resistance. A small amount can make the vehicle tend to stay steered straight, so depending on the application a small amount may be desired, but probably not more than a degree or two. Kingpin Offset increases the steering moments and is ideally zero. Scrub Offset is beneficial and should be determined from the designed caster angle. It is important to consider these forces and the geometry behind them when designing a HPV. There is much intuitive or experimental data available concerning steering geometry and what is desirable for racing performance. However, it is important to also consider the “engineering” behind the conclusions. Engineering involves analytical models and calculations; numbers, to support design decisions. Determining the proper geometry for steering is not something best left to chance or trial and error. By analyzing the forces encountered in steering and the geometry that effects them a satisfactory solution can be attained. Bibliography Gillespie, Thomas D., Fundamentals of Vehicle Dynamics, SAE, 1992.