- School of Science and Computer Engineering
advertisement

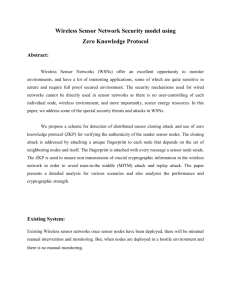
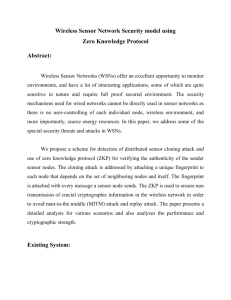
Master Thesis Proposal Applying image processing techniques to simulate a self organized sensor network for tracking objects By Sam Tran P. School of Science and Computer Engineering University of Houston – Clear Lake 12/2004 Committee members and signatures Approved by: Date: ------------------------------------------------------------Advisor: Dr. T. A. Yang ------------------------------------------------------------Committee member: Dr. L. Shih ------------------------------------------------------------Committee member: Dr. G. C. Collins Deans ------------------------------------------------------------------------- 1 Abstract This thesis aims to simulate a distributed sensor network for tracking objects, and to evaluate the performance and security of tracking algorithms in the implemented simulation. A distributed sensor network is composed of computer nodes that communicate wirelessly between each other, and with the base station. Based on the node positions, the base generates a geographic image about the network, and uses the network image to organize the network for the purpose of tracking objects entering the covered area of the sensor network. Existing self-organization algorithms for sensor networks tend to be inaccurate, and, in order to improve accuracy, may consume lots of energy, which is typically not affordable in wireless sensor nodes. I propose the development of new tracking methods, by applying techniques of image processing, such as border detection and skeletonization, to improve the accuracy of tracking objects in a sensor network. The proposed method, and some of the existing methods, will be evaluated in the simulated sensor network. Both performance and security issues will be investigated. 2 1. Introduction A wireless sensor network is a network of wireless sensor nodes. Each node is a computer with attached sensors that can process, exchange sensed data, as well as communicate wirelessly among themselves to perform various tasks. Since the network topology frequently changes due to environment conditions and multi-hop communication is required, reconfigurable self organization (including routing and sensor deployment) is the most important aspect of designing a wireless sensor network. Besides, each sensor node is a low performance computer with a tiny battery. Hence, minimizing communications among the nodes is one of the essential requirements in designing a network of wireless sensor nodes. 2. Related work The current self-organization algorithms are based on the LEACH (Low Energy Adaptive Clustering Hierarchy) algorithm, in which the nodes are grouped into a hierarchical tree [1] (as illustrated in Figure 1). The node at the root level represents the base station, the leaf level consists of sensor nodes, and the middle is replay nodes which collect, examine, compress, or encrypt the sensed data and then hierarchically forward the processed data to the base. 3 Figure 1: Nodes are grouped into a hierarchical tree in LEACH The LEACH Algorithm First, a random node broadcasts to its neighbors its intent to be the head of a cluster. Each neighbor might receive many invitations to join the clusters. However, it selects which cluster it wants to be a member of. Once all nodes are organized, each head makes a schedule for each of its member nodes. And then, these heads also belong to higher level clusters and so on until they hit the base at the top level (the root). [2] Tracking 4 As shown in Figure 1, in the hierarchical tree, the lower the level the higher the number of nodes that level has. Normally, the base at the top level does not activate all the nodes in the tree, but just nodes down to a certain lower level. When an active node senses an object, it will activate all nodes in its cluster, collect the sensed data, examine (or compress) it, and forward it to the base. Weaknesses of LEACH Inaccuracy: Normally, only the heads are activated. That is, only a few points in the sensing area are active at a time. It leads to inaccuracy in tracking objects. To increase accuracy, the network must activate nodes at low levels. However, lower levels contain more nodes. The network will consume more energy when more nodes are activated. Another issue related to inaccuracy is that multiple sensors may sense the same data simultaneously. Thus, they increase the overhead of the head being required to process redundant data. (To deal with this challenging issue, some algorithms have been applied to detect the overlapped sensing among nodes in a cluster [3].) Waste of Energy: When detecting an object, all nodes in a cluster are activated. Also, when the head dies, all nodes in the clusters have to re-elect another head. These operations involve a lot of communication among the nodes, and thus incur extra demand for battery power. 5 3. Proposed method The proposed algorithm uses the border detection and skeletonization method to handle the task of tracking objects in the wireless sensor network. Step 1: Send position information to the base: When a large number of sensor nodes are deployed, each of them needs to send its own position back to the base station. Figure 2 shows how the base and the sensor nodes may interact to have this task accomplished. Base Ask Return Figure 2: Nodes sending location information to the base Step 1a: The base sends its ID to its neighbors and asks them about their IDs and locations. Step 1b: After receiving the information, the base will assign its ID as the father for the nodes that have responded, and require them to ask 6 their neighbors about IDs and location information and then forward the information back to the base. Step 1c: At each of the neighbors, step 1a repeats. The recursion continues until all nodes are reached. At that time, the base gets information (positions and IDs) of all nodes. Step 2: Assign tasks to nodes (Figure 3): Base Sub-skin Skin Skeleton Figure 3: Image processing to assign task to nodes Step 2a: After getting all information about the network, the base builds a geographic image of the network. The skeleton of the image forms the main route. The border acts as the skin (all nodes on the skin are in active state). If the distance from the skin to the skeleton is 7 too far (out of the coverage zone of a node), sub-skin layers are created to replay messages from the skin to the skeleton (the main route). Step 2b: The base then assigns different functions to various nodes in the sensor network. The nodes are assigned respectively as skin (active), sub-skin (replay), skeleton (main route), or reservation (sleep). Each node has a father, possibly one or more sons, and some neighbors, which include the neighboring nodes that are not in sleep mode and not the father or sons. Step 3: Track objects: We assume that tracked objects come from outside of the sensing zone. Normally, only skin nodes are active. When a node detects an object, it sends the signal to its father and wakes up the appropriate nodes (father or sons). The father will transfer the message to the main route (the skeleton) to get to the base. At the appropriate node, after switching to active, it wakes up the neighbors to be active to prepare for sensing the object (because the object could move toward the neighbors). The process continues recursively, and the sensor network continually monitors the object. Information about the object is continually forwarded to the base, where the information is updated. The sub-skin nodes will 8 automatically switch to replay status after a specific period of idle time, when nothing is sensed. Step 4: Maintenance: To keep information about the sensor network up-to-date, each node periodically checks the availability of its neighbors by sending a testing message to them. If a node finds out that one of its neighbors is dead, it reports the dead neighbor’s ID to the base. The base updates the configuration, and re-examines the network map to decide which method replacement or re-assignment should be applied to keep the network operational (as discussed in step 2 above). It is noted that security issues will need to be resolved in maintaining the effective operations of the sensor network. Take the periodic maintenance (step 4) as an example. How can the base prevent a malicious node from sending false information with the purpose of disabling the network? 4. Thesis plan The thesis will start from spring 2005 and end in summer 2005. Step 1 (2 weeks) Install and configure the simulation tool (TOSSIM or NS-2). Step 2 (2 weeks) 9 Generate the geographic image from simulation node locations and its coverage zone. Step 3 (4 weeks) Build the skeleton, the skin (border), and the sub-skins from the image. Step 4 (7 weeks) Use the tool to simulate the algorithm, and investigate its performance and security impact on the sensor network. Step 5 (5 weeks) Test the method. Simulate LEACH algorithm and then compare the accuracy and power consumption of the algorithm to the LEACH. The expected outcome is that the proposed algorithm consumes less energy and gives more exact results. 10 References 1. Manish Kochhal, Loren Schwiebert, and Sandeep Gupta (2004). “Integrating Sensing Perspectives for Better Self Organization of Ad Hoc Wireless Sensor Networks”. JOURNAL OF INFORMATION SCIENCE AND ENGINEERING 20, 449-475 (2004). Retrieved 11/7/2004 from http://newslab.cs.wayne.edu/jise.pdf 2. Wendi Rabiner, Anantha Chandrakasan, and Hari Balakrishnan (10/2004). “Energy-Efficient communication protocol for Wireless Microsensor Networks”. THE 33RD HAWAII INTERNATIONAL CONFERENCE ON SYSTEM SCIENCES (Oct 20, 2004). Retrieved 11/12/2004 from http://faculty.cs.tamu.edu/dzsong/teaching/fall2004/netbot/John_G.p pt 3. Himanshu Gupta, Samir R. Das, Quinyi Gu (2003). “Connected Sensor Cover: Self-Organization of Sensor Networks for Efficient Query Execution”. THE FOURTH ACM INTERNATIONAL SYMPOSIUM ON MOBILE AD HOC NETWORKING AND COMPUTING (MOBIHOC) (2003). 11 Retrieved 11/10/2004 from www.cs.sunysb.edu/~hgupta/ps/coverage.ps 12