Chapter 12 Human Head
advertisement

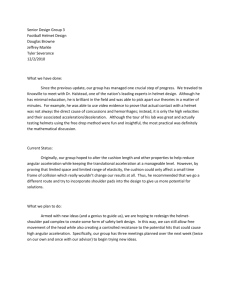
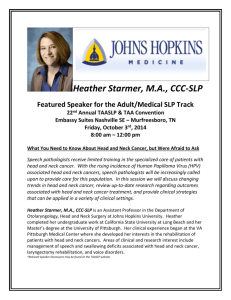
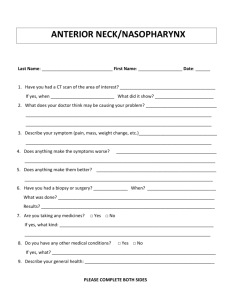
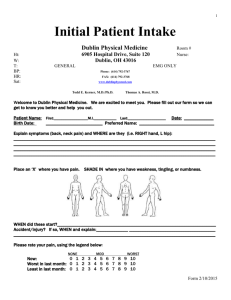
Chapter 11 Human Head-Neck Dynamics 11.1 Human Head-Neck Dynamics During the past 30 years, there has been an increasing interest in head/neck dynamics during crashes or high acceleration environments. This interest stems from the high incidence of injuries occurring in automobile accidents. Since most of the traffic fatalities are the result of injuries to the head/neck system this has caused safety and research engineers to focus their attention upon head/neck injury criteria and head/neck protective devices. The major cause of these injuries are direct impact and indirect impact (e.g., hyperextension or “whiplash” ) of the head/neck system during crashes and periods of high acceleration. Whiplash is a result of a rapidly applied displacement (and/or acceleration) field to the torso in the poster anterior direction with the head and neck unrestrained. To be better able to understand these phenomena, the primary concern of researchers has been the dynamics of the head/neck system. These interests and concerns have stimulated the development of a number of experimental studies of head/neck system dynamic response. These studies have used both volunteers and dummies in a variety of acceleration configurations. A summary of some of these experiments is contained in references [1-5]. In a paper, Huston, et al. [6] suggested that it may be possible to obtain analytical simulation of head/neck dynamics by using a biodynamic computer model of the human body head/neck system. Indeed, by using the SuperCrash Crash Victim computer model [7], it is possible to duplicate experimental data. These encouraging results are a motivating factor for the head/neck study summarized herein. There have occurred significant advances in head/neck modeling in recent years. These advances have changed from simple pendulum models to elaborate multibody dynamics analysis models currently being used. References [8-20] provide details of some efforts in this research. Although these efforts have been reasonably successful, it is the opinion of this author that there has not yet been developed a comprehensive and user-friendly head/neck model. However, the paragraphs of this chapter are believed to provide an outline of an approach toward the development of such a model. In this approach, a flexible and inexpensive technique that employs multibody dynamics analysis is used to model and simulate head/neck system. The head/neck system is modeled as a series of rigid bodies, representing the bones 1 and vertebrae, together with a system of nonlinear springs and dampers representing the discs, ligaments, and muscles. A user-oriented computer software simulator, is also developed. This software simulator is intended to be more user friendly and reliable than the earlier simulators. It is believed that the simulator will also provide a more comprehensive analysis of the head/neck system. 11.1.1 Methods The head/neck system is modeled by nine segments representing the skull, vertebrae, and torso, as shown in Figure 11.1.1 and springs and dampers representing the discs, ligaments, and muscles. The segments are connected by spherical (ball and socket) joints representing the connecting joints of the human frame. Nonlinear springs and dampers are used between adjacent bodies to simulate the ligaments and muscles and limit the range of motion. Values for the inertia and geometrical properties of the rigid bodies are adjusted to match the actual human values. These data are obtained from experimental measurements and other published data [21-25]. Table 11.1.1-11.1.4 list the values of these parameters as they are used in the head/neck model. The “reference point” refers to the connection point between a body and its connecting lower-numbered body. The springs and dampers are placed between each adjacent body. This model can have as many as 54 degrees of freedom (3 for the translation and 3 for the orientation of the bodies relative to their adjacent bodies). Each joint has an internal force and moment to constrain its relative motion. These forces and moments may be modeled as springs and dampers taken in the form: Fi (k f x i c f x i ) (i=1,2,3) (11.1.1) and M i (k m i c m i ) (i=1,2,3) (11.1.2) where Fi and Mi are typical force and moment components, xi and i represent displacement and rotation variables. The force and damping constant, kf , cf have the forms: 2 kf0 for x min x x max k k ( x x ) for x x max and x 0 f1 max f 0 kf 0 for x x max and x 0 k k (x x ) for x x min and x 0 f1 min f0 0 for x x min and x 0 (11.1.3) cf 0 for min max c c ( ) for max and 0 f1 max f 0 cf 0 for max and 0 c c ( ) for min and 0 f1 min f0 0 for min and 0 (11.1.4) where x, xmax, xmin and , max, min represent the values of the displacement and rotation variables and its corresponding maximum and minimum values respectively and where kf0, cf0, are spring and damping constant which can be applied throughout the total range of motion of the joint. After the joint exceeds its maximum or minimum allowable values the spring and damping increase depending upon the slope (kf1, and cf1) and the excess values. The constant km and cm have similar forms (see joint stop mechanism in Figure 11.1.2). The values of these parameters are very difficult to obtain. The difficulty stems from the nonlinear behavior of the soft tissue. Fortunately, such data is available from the many experiments conducted by Ewing, et al [1-3]. The values of these parameters have been estimated with experimental data. The model of Figure 11.1.1 can be considered as a general chain system, which is defined to be a collection of rigid bodies arbitrarily assembled so that adjoining bodies have at least one common point such that no closed loops are formed. For the system shown in Figure 11.1.1, each body has six degrees of freedom and, hence, the entire system has a total of 54 degrees of freedom and 54 generalized coordinates (27 for the translation and 27 for the rotation) need to be defined to describe the configuration of the system. It is convenient to define these coordinates as relative coordinates as opposed to absolute coordinates. 3 Let the variables xb (b= 1,...,54) be generalized coordinates representing the 54 possible degrees of freedom of the head/neck model in Figures 11.1.1. Upon introducing these coordinates, the angular velocities of the bodies and the velocities of their mass centers relative to an inertia frame may be expressed in the form: k kbm x b n om and v k v kbm x b n om (11.1.5) where the n om (m = 1,2,3) are mutually perpendicular unit vectors fixed relative to the inertial frame, and where the kbm and the v kbm are components of the partial angular velocity and partial velocity arrays as defined by Kane [26]. By differentiating equation (11.1.5) the angular accelerations of the bodies and their mass center accelerations may be written in the form: kbm x b )n om k (kbm x b and a k (v kbmx b v kbm x b )n om (11.1.6) Next, let the bodies of the model be subjected to a force field. Let the forces be represented on a typical body Bk by a force passing Fk through G k together with a couple having torque Tk . Then the generalized applied force Fb for the coordinate x b may be written as: Fb v kbmFkm kbmTkm (11.1.7) where Fkm and Tkm are the n om components of Fk and Tk . Similarly, let the inertia forces of body Bk be represented by a force Fk* passing through G k together with a couple having torque Tk* . Then the generalized inertia 4 force for x b may be written as: * * Fb* v kbm Fkm kbmTkm (11.1.8) * * where Fkm and Tkm are the n om components of Fk* and Tk* . From Kane and Levinson [19] we see that Fk* and Tk* may be expressed as: Fk* m k a k (11.1.9) and Tk* I k k k (I k k ) (11.1.10) where m k is the mass of B k and I k is the central inertia dyadic of B k . Finally, the equations of motion of a given head/neck model composed of rigid interconnected segment could be obtained using Kane’s equations (Lagrange form of d’Alembert principle)[26-27]. These equations are expressed as Fb Fb* 0 (11.1.11) where Fb denotes the generalized active force and Fb* the generalized inertia force. By substituting from Equations (11.1.5) through (11.1.10), Equations (11.1.11) may be expressed as A bp x p B bp x p C bpr x p x r Fb , b = 1,…,54 (11.1.12) where the coefficient of A bp , B bp , and C bpr are given by 5 A bp m k v kbm v kpn I kmn kbm kpn kpn B bp m k v kbm v kpm I kmn kbm and C bpr e rsm I ksn kbm kqr kpn (11.1.13) where the I kmn are the n om , n on components of I k , e rsm represents the permutation symbol. In equation (11.1.12) the coefficients A bp , B bp , and C bpr represent the contribution of the generalized inertia forces, Fb* . The generalized active forces, Fb can be broken into two components (internal and external) Fb Fbint Fbext (11.1.14) where the Fbint is the contribution of the joint forces and moments representing the action of soft tissues, and the Fbext represents the externally applied forces and moments such as the external loads, and contact forces on the head/neck model. The modeling of the generalized active forces and moments will depend on the model at hand. Generally, representation of soft tissues by springs and dampers one would express their contribution for each segment in inertial frame by the generalized coordinates and their time derivatives. Equations (11.1.12) form a set of 54 simultaneous, second-order ordinary, nonlinear differential equations determining the 54 generalized coordinates xb of the system. If some of the xb are specified, then the equations become algebraic equations for the unknown forces or moments associated with the specific xb. Since the coefficients Abp, Bbp, ,Cbpr and Fb of these equations are algebraic functions of the physical parameters 6 and the generalized coordinates, the equations may be integrated numerically using a standard integration algorithms. Such algorithms have been constructed and compiled into a Fortran based computer program. The input data required by the model consists of the following; (1) body segment dimensions and physical constants of the head/neck model. These data consist of the masses and the local components of their central inertia dyadic and the local components of the vectors locating their mass centers and their connection joints. (2) intervertebral disc material parameters. (3) input acceleration at B1 (torso). (4) Numerical integration parameters. These data define the integration time and error allowances. The numerical integration then produces a time history of the linear and angular displacements, velocities and accelerations of the mass centers of the bodies of the head/neck model. These data are expressed relative to the inertial frame R. 11.1.2 Results In the first stage of this study, a three-dimensional head/neck multibody system simulator is developed. The simulator allows a wide range of application including head/neck system response during impact and a high acceleration environment. There is little experimental data available which can be used to check the preceding analytical model. However, in an attempt to validate the model, a comparison was performed between the model’s head center of gravity motion to that obtained by Ewing, et al. [1] at the Naval Aerospace Medical research Laboratory for volunteer sled test data. In the verification, a sled deceleration profile, the known motion applied to the sled, shown in Figure 11.1.3 was input to the model’s torso (first body B1). This deceleration profile is typical of those experienced by volunteers seated in a moving sled which is brought to a sudden stop. The subject was firmly attached to a sled seat. The seat was then accelerated. The restraint system consisted of the lap belts and shoulder belts. An acceleration applied to the thorax at B1(torso) is a reasonable representation of the input to the subject produced by the sled. The head mass center angular acceleration, angular velocity, and angular displacement were measured. These data then were calculated using the model with approximately input. A comparison of the results is shown in Figures 11.1.4-11.1.6. From the comparisons we can see that there is a very good agreement between the experimental results and those predicted by the computer 7 model. In the examples we can also examine the effect of protective helmet mass on head/neck dynamics. The deceleration profile of Figure 11.1.7 was used as a horizontal deceleration input for a head/neck model which was modified to simulate the use of different helmet masses. The helmets were modeled by adjusted the head mass and inertia in equation (11.1.12). The relative effect of 1.004 kg and a 2.150 kg helmet on head angular acceleration and angular rotation were computed. The results are shown in Figure 11.1.8 and 11.1.9. From the Figures it is seen that the helmet mass slightly decreases the peak head angular acceleration, but it is markedly increases the peak head angular rotation. This angular rotation could aggravate a hyper flexion and hyperextension under a severe acceleration environment. These examples show that these can exist potentially harmful inertia effects of protective helmets in high-acceleration environment where there is no direct head impact. 11.1.3 Discussion This modeling of the head/neck system, and its simulation, represents one of the most sophisticated head/neck models available. However, further refinement of the model is necessary as more experimental data becomes available. This would include refinement of the soft tissue biomechanical properties. There are several applications of head/neck models. First, a head/neck model which simulates gross-motion head/neck dynamics can be used to determine dynamic forces on the head/neck and upper torso during high acceleration environments so that protective design principles can be incorporated into automobiles, motorcycles, and sports equipment. Also, the parameters of the model can be scaled to accommodate different sizes of people. 11.1.4 Conclusions The analysis shows that it is now possible to construct reliable multibody simulation models of human head-neck dynamics. The model is three-dimensional with six degrees of freedom at each joint. The model was also developed so that a close correlation between the human head/neck anatomy and the model’s segments. Injury in the head/neck region can be predicted in one of two ways with this model. The first way is to take the force-time histories of each segment in the model. If the forces levels then exceed the ultimate allowable forces, then injury can be predicted. The other method of injury prediction is by using the Head Injury Criterion (HIC) [28]. The head’s linear acceleration obtained from the model can be used in the HIC. These 8 values would then given an indication of the possible levels of injury in the head. The success of the modeling is due to recent advances in computer hardware and software and new approaches in formulating the governing dynamical equations of motion. The examples presented show the range of applicability of the model. Future research with the model could include a study on the influences that headrest, seatback angle, and airbags have on the dynamic response of the model, criteria for injury of the head/neck system, and whiplash phenomenon. When this is done, the model could be an effective tool for predicting injury in a variety of high acceleration configuration environments. 9 Head (B9) C1 (B8) C2 (B7) C3 (B6) C4 (B 5) C5 (B4) C6 (B3) Z C7 (B2) X Torso (B1) R (B0) Figure 11.1.1 Head-Neck Model 10 Y Y:k f,cf,km,cm X:x, Y0:kf0,cf0,kmo,cmo slope:kf1,cf1,km1,cm1 slope slope Y0 Xmin Xmax X Figure 11.1.2 Joint Stop Mechanism 11 Sled Acceleration (m/sec/sec) Time (msec) 10 0 -10 0 13 25 38 50 63 75 88 100 113 125 138 150 163 175 188 200 213 225 238 250 -20 -30 -40 -50 -60 -70 -80 Figure 11.1.3 Horizontal Deceleration profile from Test. 12 Angular Accleration (rad/sec/sec) exp 1500 model 1000 500 Time (msec) 0 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 -500 -1000 Figure 11.1.4 Comparison of Analytical Model and Experimental Angular Acceleration of the Head. 13 Angular Velocity (rad/sec) exp model 25 20 15 10 5 0 -5 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 -10 Time (msec) Figure 11.1.5 Comparison of Analytical Model and Experimental Angular Velocity of the Head. 14 Angular Displacement (rad) exp model 1.8 1.6 1.4 1.2 1 0.8 0.6 0.4 0.2 0 -0.2 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 Tme(msec) Figure 11.1.6 Comparison of Analytical Model and Experimental Angular Displacement of the Head. 15 Deceleration Profile (m/sec/sec) 120 100 80 60 40 20 0 -20 0 40 80 160 240 Time (msec) Figure 11.1.7 Horizontal Deceleration profile. 16 Head Angular Accleration (rad/sec/sec) without helmet 1.004 kg helmet 2.150 kg helmet 1500 1000 500 Time (msec) 0 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 -500 -1000 -1500 Figure 11.1.8 Head Angular Acceleration Comparison. 17 Head Angular Rotation (Degrees) without helmet 1.004 kg helmet 2.150 kg helmet 160 140 120 100 80 60 40 20 0 -20 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 Time (msec) Figure 11.1.9 Head Angular Rotation Comparison. 18 Table 11.1.1 Mass of the Head/Neck System Body 1 2 3 4 5 6 7 8 9 Torso C7 C6 C5 C4 C3 C2 C1 Head Number Body Label Mass(kg) 49.14 0.25 0.25 0.25 0.25 0.25 0.25 0.25 4.38 19 Table 11.1.2 Mass Center Position of the Head/Neck System Body Body Number Label Mass Center Position(m) 1 Torso 0.0 0.0 0.10 2 C7 0.0 0.0 0.007 3 C6 0.0 0.0 0.007 4 C5 0.0 0.0 0.007 5 C4 0.0 0.0 0.007 6 C3 0.0 0.0 0.007 7 C2 0.0 0.0 0.009 8 C1 0.0 0.0 0.009 9 Head 0.012 0.0 0.07 20 Table 11.1.3 Reference Point Position of the Head/Neck System Body Body Number Label Reference Point Position (m) 1 Torso 0.0 0.0 0.0 2 C7 0.0 0.0 0.20 3 C6 0.0 0.0 0.015 4 C5 0.0 0.0 0.013 5 C4 0.0 0.0 0.013 6 C3 0.0 0.0 0.014 7 C2 0.0 0.0 0.014 8 C1 0.0 0.0 0.017 9 Head 0.0 0.0 0.018 21 Table 11.1.4 Inertia Matrices for the Head/Neck System Body Body Number Label 1 Torso 2 Ixx Iyy Izz (10-3 kg m2) 1243.0 1243.0 1243.0 C7 0.32 0.32 0.64 3 C6 0.22 0.22 0.44 4 C5 0.20 0.20 0.41 5 C4 0.19 0.19 0.37 6 C3 0.18 0.18 0.36 7 C2 0.20 0.20 0.39 8 C1 0.20 0.20 0.39 9 Head 18.1 21.5 14.2 22 11.2 Dynamics Modeling of Human Temporomandibular Joint During Whiplash Rear-end impacts account for more than one third of vehicle accidents, and nearly 40% of these accidents produce whiplash injuries. During rear-end impact of a vehicle, an occupant’s head is thrust rearward with respect to the vehicle in a typical whiplash action. During this motion, complex dynamic forces act on the jaw bone. Researchers have reported symptoms suggesting potential injury to the temporomandibular joint following vehicle rear-end impact accidents [29-32]. Jaw postural mechanics have also been proposed as a cause of temporomandibular joint injuries after a vehicle rear-end impact accident. Weinberg and Lapointe hypothesized that opening the jaw during impact injuries temporomandibular joint intracapsular tissues and causes myofacial injury. These authors argued that with acceleration of the patient’s body after a rear-end impact, the unsupported head accelerates less quickly and mandible even more so than the cranium, resulting in rapid jaw opening with downward and forward displacement of the disk relative to the condyle. Jeffrey A. et al. [33] gathered data from 219 patients identifying temporomandibular joint dysfunction after an vehicle accident. Viano [34] indicated that when the seatback angle increase rapidly the probability of injuries also increase. Jeffrey et. al. [35] shown that temporomandibular joint or masticatory muscle injury may be associated with varying postural characteristics and impact events, including speed, direction of impact and vehicular damage. Huang [36] using a computer model show that when the seatback angle and impact velocity increases rapidly the probability of whiplash injury also increase. The dynamics of the head/neck system of an occupant involved in a rear-end impact are not easily analyze. The jaw is even more difficult to analyze, since its dynamic motion depends upon that of the head. The major cause of these injuries are direct impact and indirect impact (e.g., hyperextension or “whiplash” ) of the head/neck system during crashes and periods of high acceleration. Whiplash is a result of a rapidly applied displacement (and/or acceleration) field to the torso in the poster anterior direction with the head and neck unrestrained. To be better able to understand these phenomena, the primary concern of researchers has been the dynamics of the head/neck system. In a paper, Huang [37] suggested that it may be possible to obtain analytical simulation of head/neck dynamics by using a biodynamic computer model of the human body head/neck system. Indeed, by using the SuperCrash model, a crash victim computer simulator [38], it could be able to exhibit reasonable experimental 23 data. These encouraging results were a motivating factor for the head/neck study summarized in this paper. There have occurred significant advances in head/neck modeling in recent years. These advances have changed from simple pendulum models to elaborate multibody dynamics analysis models currently being used. References [39-51] provide details of some efforts in this research. But all these works didn’t specifically discuss about temporomandibular joint. In this paper, an attempt is made to use the computer to investigate the temporomandibular joint of the occupant during rear-end impacts. 11.2.1 The Biodynamic Head/Neck/Jaw Model During the past 30 years, there has been an increasing interest in head/neck dynamics during crashes or high acceleration environments. This interest stems from the high incidence of injuries occurring in automobile accidents. References [39-51] provide details of some efforts in this research. In some of these modeling efforts, it was shown that computer analyses using numerical schemes based on biodynamic models of the head/neck have been successful in obtained results. It is possible to construct a comprehensive three-dimensional head/neck model that can be calibrated and validated with experimental data. In this study, the head/neck/jaw system is modeled by ten segments representing the skull, jaw, vertebrae, and torso, as shown in Figure 11.2.1. The torso and neck are elliptical cylinders and head is a spherical. The jaw is represented by frustums of elliptical cones. Nonlinear springs and dampers are used between adjacent bodies to simulate the ligaments and muscles and limit the range of motion. Values for the inertia and geometrical properties of the rigid bodies are adjusted to match the actual human values. These data are obtained from experimental measurements and other published data [52-57]. When the mandible is rotated, during whiplash, a simultaneous translation is the result of biomechanical constraints. The mandible can be modeled as a rigid body with a hinge joint for jaw opening and closing, and including translation during jaw opening. Thus, in this model we can have as many as 55 degrees of freedom (3 for the translation and 3 for the orientation of the bodies relative to their adjacent bodies, 1 for the orientation of the jaw relative to the head). The kinematics of the head/neck/jaw model may be describer and defined in terms of 55 position and orientation variables as Table 11.2.1. 11.2.2 Simulation and Analysis 24 In this study, the motion of the head/neck/jaw model is restricted to motion in the X-Z plane. The jaw is limited to rotate about its hinge 0 ~ 30. The jaw itself is modeled as a rigid body with mass and inertia properties 1/20 that of the head itself. The jaw is hinged to rotate about as axis parallel to the global Y-axis. The hinge point is located 0.025 m forward of and 0.089 m above the joint between the head and neck. The mass center of the jaw is about 0.076 m forward of and 0.076 m below this hinge point, The geometry of the jaw model is shown in Figure 11.2.2. The input crash environment was simulated by using a range of impact severity from 4.2 ~ 9.6 m/s change in velocity simulating rear-end impact. The rear-end impact event is solved for a time interval from 0.00 seconds to 0.19 seconds. The results are shown in Figure 11.2.3 to 11.2.6. 11.2.3 Results and Discussion In the Figure 11.2.3, we can see that, the relative angle between the head and jaw (jaw opening angle) increase with the impact velocity. Figure 11.2.4 shows the acceleration of jaw increase with increase in velocity. In 9.6 m/s impact induced a peak jaw angular acceleration of 495 rad/s2. For 6.4 m/s and 4.2 m/s impact the peak jaw angular accelerations are 258 rad/s2 and 90 rad/s2 respectively. This increased acceleration significantly aggravates a dynamic force of jaw. Figure 11.2.5 displays the predicted temporomandibular joint torques caused by the rotation of the mandible about the medico-lateral axis during the rear-end impact. The positive slope of the torques during the first period of the rear-end impact (0.00-0.13 s) illustrate the tendency for jaw closing. The negative slope of the torques during the remaining impact period indicated a tendency for jaw opening. Figure 12.2.6 illustrates time series of the jaw mass center acceleration in space. The peak linear acceleration of the jaw were: 14.7 g for the 9.2 m/s impact, 11.3g for the 6.4 m/s impact, and 5.8g for the 4.2 m/s impact. From the Figure, we can see that the acceleration of the jaw is characterized by several peaks. For the 9.2 m/s case the maximum peak is about 14.7 g, and occurs after 0.14 seconds. Multiplying the peak acceleration by the jaw mass (0.292 kg) yields a peak force on the jaw bone of 42.1 newtons. This force is applied at the temporomandibular joint. The hyperextension of the head and neck caused jaw opening. The term ‘whiplash’ defines a hyperextension injury to the soft tissues of the neck. Sudden forward acceleration of a vehicle, such as rear-end impact results in a backward thrust of the head on the relaxed musculature of the neck, thus causing violent hyperextension. The model was developed so that a close correlation between the human head/neck/jaw 25 anatomy and the model’s segments. By this model, the motions and forces of the temporomandibular joint that occur during whiplash are obtained. These data may be obtained for a variety of vehicle impact conditions. The success of the modeling is due to recent advances in computer and new approaches in formulating the governing dynamical equations of motion. 11.2.4 Conclusions The analysis shows that it is now possible to construct reliable multibody simulation models of human head/neck/jaw to analysis dynamics of temporomandibular joint. However, there are much more to be done before the model realize these benefits. More data on what happens of the temporomandibular joint dysfunction during the whiplash are needed to adjust the model parameters. Better modeling of the soft tissue, disc condyle friction and tolerance limits of temporomandibular joint tissues are needed. Finally, a better understanding of causal relationship between the joint forces and torques during whiplash and the temporomandibular joint damage is needed. Beyond this, criteria for injury need to be established. When this is done, the model could serve as an effective tool predicting temporomandibular joint injury in a variety of high accident configuration environments. It could then be used in the development of safety devices. 26 X1,X2,X3 position of a reference point in B1, the torso, relative to the reference point of the inertia frame X4,X5,X6 orientation of a reference point in B1, the torso, relative to the reference point of the inertia frame X7,X8,X9 position of a reference point in B2, relative to B1. X10,X11,X12 orientation of a reference point in B2, relative to B1. X13,X14,X15 position of a reference point in B3, relative to B2. X16,X17,X18 orientation of a reference point in B3, relative to B2. X19,X20,X21 position of a reference point in B4, relative to B3. X22,X23,X24 orientation of a reference point in B4, relative to B3. X25,X26,X27 position of a reference point in B5, relative to B4. X28,X29,X30 orientation of a reference point in B5, relative to B4. X31,X32,X33 position of a reference point in B6, relative to B5. X34,X35,X36 orientation of a reference point in B6, relative to B5. X37,X38,X39 position of a reference point in B7, relative to B6. X40,X41,X42 orientation of a reference point in B7, relative to B6. X43,X44,X45 position of a reference point in B8, relative to B7. X46,X47,X48 orientation of a reference point in B8, relative to B7. X49,X50,X51 position of a reference point in B9, relative to B8. X52,X53,X54 orientation of a reference point in B9, relative to B8. X55 orientation of a reference point in B10, relative to B9. Table 11.2.1 Variables of the Model 27 Head (B9) Jaw (B10) Z C1 (B8) C2 (B7) C3 (B6) C4 (B 5) C5 (B4) C6 (B3) C7 (B2) X Torso (B1) R (B0) Figure 11.2.1 Head-Neck-Jaw Model 28 Temporomandibular Joint 0.076 m 0.089 m Jaw Mass Center Head/Neck Joint 0.076 m 0.025 m Figure 11.2.2 Temporomandibular Joint Configuration 29 9.6m/s Angle (head-jaw) (degree) 6.4/m/s 4.2m/s 5 0 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 -5 -10 Time (msec) -15 -20 -25 Figure 11.2.3 Relative angle between the head and jaw. Jaw Angular Accleration (rad/sec/sec) 600 9.6m/s 6.4m/s 4.2m/s 500 400 300 Time (msec) 200 100 0 -100 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 -200 -300 -400 Figure 11.2.4 Jaw Angular Acceleration. 30 Torque (head-jaw) (N-m) 9.6m/s 4000 4.2m/s 6.4m/s 3000 2000 1000 0 -1000 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 -2000 -3000 -4000 Time (msec) Figure 11.2.5 Torques (head-jaw). Jaw Mass Center Accleration (g) 9.6m/s 6.4m/s 4.2m/s 16 14 12 10 Time (msec) 8 6 4 2 0 -2 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 Figure 11.2.6 Jaw Mass Center Acceleration. 31 11.3 Effect of Helmet Mass on Human Head/Neck Dynamics It has been generally recognized that the most series injury to the motorcycle rider is injury to the head/neck system. Recently there has been considerable interest in helmet-head/neck dynamics during crashes and periods of high acceleration. This interest is due in part to the widely accepted notion that as many as 60 percent of motorcycle accident fatalities are the result of injury to the head/neck system. This interest in helmet-head/neck dynamics has stimulated the development of a number head/neck biodynamic models. The beneficial effects of protective helmets in motorcycle crash are well documented [58-62]. Some have claimed that a helmet which offers protection against head injury from direct impact, may actually contribute to head/neck injury in indirect impact (e.g. whiplash) situations. Indeed, some researchers have been used this point of view to persuade state legislatures to withdraw mandatory motorcycle helmet laws. It is the objective of this paper to quantitatively and qualitatively examine these propositions. We will study the potential deleterious effects of the helmet mass and inertia through increased head rotations and acceleration during high acceleration periods. The head/neck computer simulation model as developed by S.C. Huang [63] is used to perform the analysis. 11.3.1 Methods During the past 20 years there has been an increasing awareness of safety issues in the motorcycle rider. A literature review reveals several hundred references with excellent surveys on crash simulation including discussions of head/neck modeling. In one of these modeling efforts , Huston, et al. [64] suggested that it may be possible to obtain analytical simulation of head/neck dynamics by using a biodynamic computer model of the human head/neck system. Since the development of that model, there have been advances in both multibody dynamics modeling and in the recording of experimental data. In multibody dynamics, the past two decades have produced marked advances in modeling with translation between bodies [65], and new kinematic methods for description of the bodies motion have been developed. More experimental data have been published [66-70]. Using the more flexible and inexpensive methodology and the improved computational techniques in conjunction with experimental data, Huang [63] developed a head/neck model (Fig. 11.1.1). The head/neck multibody system is 32 modeled in the form of an "open-chain" system. The model consists of a series of rigid bodies representing the skull, vertebrae, and torso. These bodies are connected to each other by nonlinear springs and dampers representing the disks, ligaments, and muscles. The governing of equations of such systems may be studies by use of Kane's equations and Huston's procedures [71,72], which have been shown to have distinct advantages over other formulations, such as Newton's law or Lagrange's equations, for the dynamics analysis of multibody systems [73]. The resulting equations are developed in a form ideally suited for conversion into computer algorithms for numerical development and analysis. They have shown that the equations of motion may be written in the form F a ijX j i (i, j 1,2, . . N . ,) (11.3.1) where N is the number of degrees of freedom of the system, X j are the generalized for the head/neck coordinates, and a ij and Fi are in general functions of X j and X j system of Fig. 11.1.1, the number of degrees of freedom is 54. For given initial conditions, the computer program solves these equations by means of a Runge-Kutta integrator. The anatomy of the head/neck system is divided into bones and soft tissue. The largest and heaviest bone is the skull, the other bones of the head/neck system are seven cervical vertebrae (C1-C7). Values for the inertia and geometrical properties of the rigid bodies are adjusted to match the actual values. These data are obtained from experimental measurements and other published data [74-78]. The segments are connected by spherical joints representing the connecting joints of the human frame. Nonlinear springs and dampers are used between adjacent bodies to simulate the ligaments and muscles and limit the range of motion. The joint constraints limiting the relative motion of the segments are modeled as non-linear character. The values of the various constants for the ligaments, disc, muscles and joints are difficult to specify because of the non-linear behavior of the soft tissue during dynamic loading. The spring and dampers produce forces and moments on and between the vertebrae and the skull. These forces and moments may be modeled as springs and dampers taken in the form. 33 11.3.2 Simulation To simulate head/neck dynamics during a crash environment, the system of Fig. 11.1.1 was subjected to a horizontal deceleration pulse as shown in Fig. 11.3.1. This deceleration profile is typical of those experienced by volunteers seated in a moving sled which is brought to a sudden stop, as recorded by Ewing, et al. [66]. Figure 11.3.2 shows a comparison between the head angular acceleration predicted by the model and that measured experimentally. The deceleration pulse of Fig. 11.3.3 was then used as a horizontal deceleration input for a head/neck model which was modified to simulate the use of different helmet masses. The helmets were modeled by adjusted the head mass and inertia in governing equations. The relative effect of 0.8 kg, 1.2 kg, and 1.6 kg helmet on head angular acceleration and angular rotation were computed. The results are shown in Figure 11.3.4 to 11.3.8. 11.3.3 Discussion and Conclusions We can see from the results, the accelerations of mass center of head and neck (C4) increase with the increase in helmet mass. As seen in Figure 11.3.6, the head mass center peak accelerations of 1.6 kg helmet case is higher than that of 1.2 kg helmet case by 36.8%, and 0.8 kg helmet case by 104.0%. Also the result show the neck (C4) mass center peak accelerations of 1.6 kg helmet case is higher than that of 1.2 kg helmet case by 60.0%, and 0.8 kg helmet case by 125.0%. In the Figure 11.3.7, we can see that the angular rotation of head increase with the increase in helmet mass. As seen in Figure 11.3.8, the head angular rotation of 1.6 kg helmet case is higher than that of 1.2 kg helmet case by 19.9%, and 0.8 kg helmet case by 62.4%. The results of this analysis show that helmet mass is a important factor affect human head/neck injuries during motorcycle accident. The analysis show the peak acceleration and angular rotation of head increase with the increasing of the helmet mass. This angular rotation could aggravate a hyper flexion and hyperextension under severe acceleration environment. The simulations shows that the potentially harmful effects of protective helmets in high-acceleration environment where there is no direct head impact. 34 Sled Acceleration (m/sec/sec) Time (msec) 10 0 -10 0 13 25 38 50 63 75 88 100 113 125 138 150 163 175 188 200 213 225 238 250 -20 -30 -40 -50 -60 -70 -80 Figure 11.3.1 Horizontal Deceleration Profile From Test. Angular Accleration (rad/sec/sec) 1500 exp model 1000 500 Time (msec) 0 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 -500 -1000 Figure 11.3.2 Comparison of Analytical Model and Experimental Angular Acceleration of the Head. 35 70 Acceleration (m/sec/sec) 60 50 40 30 20 10 0 0 50 100 150 200 250 Time (msec) Figure 11.3.3 Horizontal Deceleration Profile Head Acceleration(g) 30 0.8 kg 1.2 kg 25 1.6 kg 20 15 10 5 0 0 50 100 150 200 Time(msec) Figure 11.3.4 Head Acceleration Comparison 36 Neck Acceleration(g) 25 0.8 kg 1.2 kg 1.6 kg 20 15 10 5 0 0 50 100 150 200 Time(msec) Figure 11.3.5 Neck (C4) Acceleration Comparison 0.8 kg 30 1.2 kg 1.6 kg Head Acceleration (g) 25 20 15 10 5 0 Neck (C4) Head Time(msec) Figure 11.3.6 Peak Acceleration (Head and Neck (C4)) 37 0.8 kg 1.2 kg 20 1.6 kg 0 0 20 40 60 80 100 120 140 160 180 200 -20 -40 Head rotation relative to chest (degrees) -60 -80 -100 -120 Time(msec) Figure 11.3.7 Head Angular Rotation 0.8 kg 120 1.2 kg 1.6 kg Angular Rotation (°) 100 80 60 40 20 0 Head Time(msec) Figure 11.3.8 Peak Angular Rotation (Head) 38 References [1].Ewing,C.L., and Thomas,D.J., “Human Head and Neck Response to Impact Acceleration,” Joint Army-Navy Monograph, 21, 1972. [2].Ewing,C.L., et al., “The Effect of Duration Rate of Onset and Peak Sled Acceleration on the Dynamic Response of the Human Head and Neck,” Proceedings 20th Stapp car Crash Conference, SAE, 3-41, 1976. [3].Ewing,C.L., et al., “Dynamic Response to Human and Primate Head and Neck to +Gy Impact Acceleration,” Naval Aerospace Medical Research Lab Detachment, Michoud, New Orleans, La., 1978. [4].Advani,S.H., Huston,J., Powell, W.R., and Cook, W., “Human Head and Neck Dynamic Response: Analytical Models and Experimental Data,” Aircraft Crash-worthiness, Saczalski, et al., eds., University Press of Virginia, Charlottesville, 1975. [5].Thunnissen,J., Wismans,J., Ewing,C.L., and Thomas,D.J., “Human Volunteer Head-Neck Response in Frontal Flexion: A New Analysis”, SAE Paper 952721, 1995. [6].Huston,J.C. and Advani,S.H., “Three-Dimensional Model of the Human Head and Neck for Automobile Crashes,” Mathematical Modeling Biodynamics Response to Impact, Society of Automotive Engineers, Vol. SP-412, pp. 9-20, 1976. [7].Huang,S.C., “Biomechanical Modeling and Simulations of Automobile Crash Victims,” Computers & Structures Vol. 57, No. 3, pp. 541-549, 1995. [8].Kabo,J.M. and Goldsmith,W., “Response of a Human Head-Neck Model to Transient Saggital Plane Loading,” J. of Biomechanics, Vol. 16, 313-325, 1983. [9].Merrill,T., Goldsmith,W., and Deng,Y.C., “Three-Dimensional Response of a Lumped Parameter Head-Neck Model Due to Impact and Impulsive Loading,” J. of Biomechanics, Vol. 17, No. 2, 81-96, 1984. [10].Seemann,M. R., Muzzy III,W. H., and Lustick,L.S., “Comparison of Human and Hybrid III Head and Neck Dynamic Response,” Proceedings of the 30th Stapp Car Crash Conference, 1986. [11].Bosio,A. C. and Bowman,B.M., “Simulation of Head-Neck Dynamics Response in -Gx and +Gy,” Proceedings of the 30th Stapp Car Crash Conference, 345-378, 1986. [12].Tien,C.S. and Huston,R.L., “Numerical Advances in Gross-Motion Simulations of Head-Neck Dynamics,” J. of Biomechanical Engineering, 109: 163-168, 1987. 39 [13].Viano,D.C., “Biomechanics of Head Injury Toward a Theory Linking Head Dynamic Motion, Brain Tissue Deformation and Neural Trauma,” Proceedings of the 32nd Stapp Car Crash Conference, 1-20, 1988. [14].Yang,K.H. and Le,J., “Finite Element Modeling of Hybrid III Head-Neck Complex.,” Proceedings of the 36th Stapp Car Crash Conference, 219-233, 1992. [15].Deng,Y.C., and Goldsmith,W., “Response of a Human Head/Neck/Upper-Torso Replica to Dynamic Loading – I Physical Model”, Journal Biomechanics, 20(5), 471-486, 1987. [16].Deng,Y.C., and Goldsmith,W., “Response of a Human Head/Neck/Upper-Torso Replica to Dynamic Loading – II Analytical/Numerical Model”, Journal Biomechanics, 20(5), 487-497, 1987. [17].Luo,Z., and Goldsmith,W., “Reaction of a Human Head/Neck/Torso System to Shock”, Journal Biomechanics, 24(7), 499-510, 1991. [18].Jager,M.de, Sauren,A., Thunissen,J., and Wismans,J., “A Global and a Detailed Mathematical Model for Head-Neck Dynamics”, SAE Paper 962430, 1996. [19].Horst,M j Van der, Thunissen,J, Happee,R., Haaster,RMHP Van, and Wismans,J., “The Influence of Muscle Activity on Head-Neck Response During Impact”, SAE Paper 973346, 1997. [20].Brelin-Fornari,J., Arbyan,A., and Deng,Y.C., “Use of Active Muscles in a Model of the Human head and Neck”, Proc. of the STAPP Conference, 1998. [21].Francis,C., “Dimensions of the cervical Vertebrae,” Anatomy Record, Vol. 122, pp. 603-609, 1955. [22].Lanier,R., “The Presacral Vertebrae of American White and Negro Males,” American Journal of Physical Anthropology, Vol. 12, pp. 341-420, 1939. [23].Todd,T., and Lindala,A., “Dimensions of the Body, Whites and American Negros of Both Sexes,” American Journal of Physical Anthropology, Vol. 12, pp.35-119, 1939. [24].King,A.I. and Prasad,P., “An Experimentally Validated Dynamic Model of the Spine,” Journal of Applied Mechanics, 41: 546-550, 1974. [25].Walker,L.B., Harris,E.H., and Pontius,V.R., “Mass, Volume, Center of Mass, and Moment of Inertia of Head and Neck of Human Body,” Proceedings of the 17th Stapp Car Crash Conference, 523-537, 1973. [26].Kane,T.R., and Levinson,D.A., “Formulation of the Equations of Motion for Complex Spacecraft,” J. Guid. Cont., 3, 99-112, 1980. [27].Huston,R.L., and Passerello,C.E., “On Multi-rigid-body System Dynamics,” Comp. Struct., 10, 439-446, 1979. [28].Versace,J., “A Review of the Severity Index,”, 15th Stapp Car Crash Conference Proceedings, SAE, 1971. 40 [29].S. Weinberg, H. Lapointe, “Cervical extension-flexion injury (whiplash) and internal derangement of the temporomandibular joint,” Journal Oral Maxillofac Surg. 45, (1987), 653-656. [30].A. Pullinger, A. Monteio, “History factors associated with symptoms of temporomandibular disorders,” Journal Oral Rehabil. 15(2), (1988), 117-124. [31].J.B. Epstein,” temporomandibular disorders, facial pain and headache following motor vehicle accidents,” Journal Can. Dent. Assoc. 58, (1992), 488-495. [32].K. Schellhas, “Temporomandibular joint injuries,” Radiology, 173, (1989), 211-216. [33].A. Jeffrey, et al., “Motor vehicle accidents and TMDS: assessing the relationship,” The Journal of the American dental association, Vol. 127, (1996), 1767-1772. [34]. D.C. Viano, “Influence of seatback angle on occupant dynamics in simulated rear-end impacts,” SAE Paper 922521, (1992), 157-164. [35]. A. Jeffrey, D.D.S. Burgess et al., “Motor vehicle accidents and TMDS: Assessing the relationship,” The Journal of the American Dental Association, Vol.127, (1996), 1767-1772. [36]. S.C. Huang., “Analysis of human body dynamics in simulated rear-end impacts ,” Human Movement Science 17, (1998), 821-838. [37]. S.C. Huang, “Numerical simulations of human head-neck dynamics, “Bio-Medical Materials and Engineering, Vol. 9, No. 2, (1999), 61-71. [38]. S.C. Huang, , “Biomechanical Modeling and Simulations of Automobile Crash Victims,” Computers & Structures Vol. 57, No. 3, (1995), 541-549. [39]. J.M. Kabo, and W. Goldsmith, “Response of a Human Head-Neck Model to Transient Saggital Plane Loading,” J. of Biomechanics, Vol. 16, (1983), 313-325. [40]. T. Merrill, W. Goldsmith, and Y.C. Deng, “Three-Dimensional Response of a Lumped Parameter Head-Neck Model Due to Impact and Impulsive Loading,” J. of Biomechanics, Vol. 17, No. 2, (1984), 81-96. [41]. M. R. Seemann, W. H. Muzzy III, and L.S Lustick, “Comparison of Human and Hybrid III Head and Neck Dynamic Response,” Proceedings of the 30th Stapp Car Crash Conference, (1986). [42]. A. C. Bosio, and B.M. Bowman, “Simulation of Head-Neck Dynamics Response in –Gx and +Gy,” Proceedings of the 30th Stapp Car Crash Conference, (1986), 345-378. [43]. C.S. Tien, and R.L. Huston, “Numerical Advances in Gross-Motion Simulations of Head-Neck Dynamics,” J. of Biomechanical Engineering, 109, (1987), 163-168. 41 [44]. D.C. Viano, “Biomechanics of Head Injury Toward a Theory Linking Head Dynamic Motion, Brain Tissue Deformation and Neural Trauma,” Proceedings of the 32nd Stapp Car Crash Conference, (1988), 1-20. [45]. K.H. Yang and J. Le, “Finite Element Modeling of Hybrid III Head-Neck Complex.,” Proceedings of the 36th Stapp Car Crash Conference, (1992), 219-233. [46].Y.C. Deng, and W. Goldsmith, “Response of a Human Head/Neck/Upper-Torso Replica to Dynamic Loading – I Physical Model”, Journal Biomechanics, 20(5), (1987), 471-486. [47].Y.C. Deng, and W. Goldsmith, “Response of a Human Head/Neck/Upper-Torso Replica to Dynamic Loading – II Analytical/Numerical Model”, Journal Biomechanics, 20(5), (1987), 487-497. [48].Z. Luo, and W. Goldsmith, “Reaction of a Human Head/Neck/Torso System to Shock”, Journal Biomechanics, 24(7), (1991), 499-510. [49].M.de Jager, A. Sauren, J. Thunissen, and J. Wismans, “A Global and a Detailed Mathematical Model for Head-Neck Dynamics”, SAE Paper 962430, (1996). [50].M j Van der Horst, J. Thunissen, R. Happee, RMHP Van Haaster, and J. Wismans, “The Influence of Muscle Activity on Head-Neck Response During Impact”, SAE Paper 973346, (1997). [51].J. Brelin-Fornari, A. Arbyan, and Y.C. Deng, “Use of Active Muscles in a Model of the Human head and Neck”, Proc. of the STAPP Conference, (1998). [52].C. Francis, “Dimensions of the cervical Vertebrae,” Anatomy Record, Vol. 122, 1955, (1955), 603-609. [53].R. Lanier, “The Presacral Vertebrae of American White and Negro Males,” American Journal of Physical Anthropology, Vol. 12, (1939), 341-420. [54].T. Todd, and A. Lindala, “Dimensions of the Body, Whites and American Negros of Both Sexes,” American Journal of Physical Anthropology, Vol. 12, (1939), 35-119. [55].A.I. King, and P. Prasad, “An Experimentally Validated Dynamic Model of the Spine,” Journal of Applied Mechanics, 41, (1974), 546-550. [56].L.B. Walker, E.H. Harris, and V.R. Pontius, “Mass, Volume, Center of Mass, and Moment of Inertia of Head and Neck of Human Body,” Proceedings of the 17th Stapp Car Crash Conference, (1973), 523-537. [57].K. Schneider, R.F. Zernicke, and G. Clark, “Modeling of Jaw-Head-Neck Dynamics during Whiplash,” Journal Dental Research Vol. 68, No. 9, (1989), 1360-1365. 42 [58].Dieter Schaper, and Jurgen Grandel: Motorcycle collisions with passenger cars-analysis of impact mechanism, kinematics, and effectiveness of full-face safety helmets. 1985; SAE paper 850094. [59].Bruce A. Simpson, W. Goldsmith and J.L. Sackman : Oblique impact on a head-helmet system", Int. J. mech. Sci. 1976; 18: 337-340. [60].Tawfik B. Khalil, werner Goldsmith and J.L. Sackman : Impact on a model head-helmet system", Int. J. mech. Sci. 1974; 16: 609-625. [61]. Jurgen Grandel and Dieter Schaper : Impact dynamic, head impact severity and helmet's energy absorption in motorcycle/passenger car accident tests. IRCOBI Proceedings, 1984. [62].R.L. Huston and J. Sears : Effect of protective helmet mass on head/neck dynamics", Journal of Biomechanical Engineering. 1981; 103: 18-23. [63].Shyh-Chour Huang : Numerical Simulation of Human Head-Neck Dynamics. Bio-Medical Materials and Engineering. 1999: Vol. 9, No. 2: 61-71. [64].Huston,R.L., Huston,J.C., and Harlow,M.W. : Comprehensive threedimensional head-neck model for impact and high acceleration studies. Aviat Space Environ Med. 49. 1978: 205-210. [65].Huston,R.L., and Passarello,C.E. : Multibody dynamics including translation between the bodies. Comp Struct. 1980: 11: 713-720. [66].Ewing,C.L., and Thomas,D.J. : Human Head and Neck Response to Impact Acceleration. Joint Army-Navy Monograph. 1972: 21. [67].Ewing,C.L., et al. : The Effect of Duration Rate of Onset and Peak Sled Acceleration on the Dynamic Response of the Human Head and Neck. Proceedings 20th Stapp car Crash Conference. 1976: SAE, 3-41. [68].Ewing,C.L., et al. : Dynamic Response to Human and Primate Head and Neck to +Gy Impact Acceleration. Naval Aerospace Medical Research Lab Detachment, Michoud, New Orleans, La., 1978. [69].Advani,S.H., Huston,J., Powell, W.R., and Cook, W. : Human Head and Neck Dynamic Response: Analytical Models and Experimental Data. Aircraft Crash-worthiness, Saczalski, et al., eds., University Press of Virginia, Charlottesville, 1975. [70].Thunnissen,J., Wismans,J., Ewing,C.L., and Thomas,D.J.: Human Volunteer Head-Neck Response in Frontal Flexion: A New Analysis. SAE Paper 952721, 1995. [71].Kane,T.R., and Levinson,D.A. : Formulation of the Equations of Motion for Complex Spacecraft,” J. Guid. Cont. 1980: 3: 99-112. [72].Huston,R.L., Passerello,C.E., and Harlow,M.W. : Dynamics of Multirigidbody Systems. ASME Journal of Applied Mechanics, 1978: Vol.45, No.4 : 43 889-894. [73].Huston,R.L. : On the equivalence of Kane's equations and Gibbs' equations for multibody dynamics formulations. Mechanics research communications, 1978: Vol.14(2) : 123-131. [74].Francis,C. : Dimensions of the cervical Vertebrae. Anatomy Record. 1955: Vol. 122 : 603-609. [75].Lanier,R. : The Presacral Vertebrae of American White and Negro Males. American Journal of Physical Anthropology. 1939: Vol. 12 : 341-420. [76].Todd,T., and Lindala,A. : Dimensions of the Body, Whites and American Negros of Both Sexes. American Journal of Physical Anthropology. 1939: Vol. 12 : 35-119. [77].King,A.I. and Prasad,P. : An Experimentally Validated Dynamic Model of the Spine. Journal of Applied Mechanics. 1974: 41: 546-550. [78].Walker,L.B., Harris,E.H., and Pontius,V.R. : Mass, Volume, Center of Mass, and Moment of Inertia of Head and Neck of Human Body. Proceedings of the 17th Stapp Car Crash Conference. 1973: 523-537. 44