[edit] Types of viscoelasticity

Viscoelasticity
From Wikipedia, the free encyclopedia
Jump to: navigation , search
Continuum mechanics
[ show ]Laws
[ show ] Solid mechanics
[ show ] Fluid mechanics
[ show ]Scientists
This box: view • talk • edit
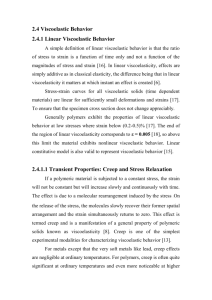
Viscoelasticity is the property of materials that exhibit both viscous and elastic characteristics when undergoing deformation . Viscous materials, like honey, resist shear flow and strain linearly with time when a stress is applied. Elastic materials strain instantaneously when stretched and just as quickly return to their original state once the stress is removed. Viscoelastic materials have elements of both of these properties and, as such, exhibit time dependent strain. Whereas elasticity is usually the result of bond stretching along crystallographic planes in an ordered solid, viscoelasticity is the result of the diffusion of atoms or molecules inside of an amorphous material
[1]
.
Contents
[ hide ]
1 Background
2 Elastic behavior versus viscoelastic behavior
3 Types of viscoelasticity
4 Dynamic modulus
5 Constitutive models of linear viscoelasticity o o o o
5.1 Maxwell model
5.2 Kelvin–Voigt model
5.3 Standard linear solid model
5.4 Generalized Maxwell Model
6 Effect of temperature on viscoelastic behavior
7 Viscoelastic creep
1
8 Measuring viscoelasticity
9 See also
10 References
[ edit ] Background
In the nineteenth century, physicists such as Maxwell , Boltzmann , and Kelvin researched and experimented with creep and recovery of glasses , metals , and rubbers
[2]
.
Viscoelasticity was further examined in the late twentieth century when synthetic polymers were engineered and used in a variety of applications
[2]
. Viscoelasticity calculations depend heavily on the viscosity variable, η. The inverse of η is also known as fluidity , φ. The value of either can be derived as a function of temperature or as a given value (ie for a dashpot )
[1]
.
Different types of responses (σ) to a change in strain rate (d /dt)
Depending on the change of strain rate versus stress inside a material the viscosity can be categorized as having a linear, non-linear, or plastic response. When a material exhibits a linear response it is categorized as a Newtonian material
[1]
. In this case the stress is linearly proportional to the strain rate. If the material exhibits a non-linear response to the strain rate, it is categorized as Non-Newtonian fluid . There is also an interesting case where the viscosity decreases as the shear/strain rate remains constant. A material which exhibits this type of behavior is known as thixotropic
[1]
. In addition, when the stress is independent of this strain rate, the material exhibits plastic deformation [1] . Many viscoelastic materials exhibit rubber like behavior explained by the thermodynamic theory of polymer elasticity . In reality all materials deviate from Hooke's law in various ways, for example by exhibiting viscous-like as well as elastic characteristics.
Viscoelastic materials are those for which the relationship between stress and strain depends on time. Anelastic solids represent a subset of viscoelastic materials: they have a
2
unique equilibrium configuration and ultimately recover fully after removal of a transient load.
Some phenomena in viscoelastic materials are: (i) if the stress is held constant, the strain increases with time (creep); (ii) if the strain is held constant, the stress decreases with time (relaxation); (iii) the effective stiffness depends on the rate of application of the load;
(iv) if cyclic loading is applied, hysteresis (a phase lag) occurs, leading to a dissipation of mechanical energy; (v) acoustic waves experience attenuation; (vi) rebound of an object following an impact is less than 100%; (vii) during rolling, frictional resistance occurs. a) Applied strain and b) induced stress as functions of time for a viscoelastic material.
All materials exhibit some viscoelastic response. In common metals such as steel or aluminum, as well as in quartz, at room temperature and at small strain, the behavior does not deviate much from linear elasticity. Synthetic polymers, wood, and human tissue as well as metals at high temperature display significant viscoelastic effects. In some applications, even a small viscoelastic response can be significant. To be complete, an
3
analysis or design involving such materials must incorporate their viscoelastic behavior.
Knowledge of the viscoelastic response of a material is based on measurement
Some examples of viscoelastic materials include amorphous polymers, semicrystalline polymers, biopolymers, metals at very high temperatures, and bitumen materials.
Cracking occurs when the strain is applied quickly and outside of the elastic limit.
A viscoelastic material has the following properties:
hysteresis is seen in the stress-strain curve .
stress relaxation occurs: step constant strain causes decreasing stress
creep occurs: step constant stress causes increasing strain
[ edit ] Elastic behavior versus viscoelastic behavior
Stress-Strain Curves for a purely elastic material (a) and a viscoelastic material (b). The red area is a hysteresis loop and shows the amount of energy lost (as heat) in a loading and unloading cycle. It is equal to , where σ is stress and is strain. [1]
Unlike purely elastic substances, a viscoelastic substance has an elastic component and a viscous component. The viscosity of a viscoelastic substance gives the substance a strain rate dependent on time [1] . Purely elastic materials do not dissipate energy (heat) when a load is applied, then removed
[1]
. However, a viscoelastic substance loses energy when a load is applied, then removed. Hysteresis is observed in the stress-strain curve, with the area of the loop being equal to the energy lost during the loading cycle
[1]
. Since viscosity is the resistance to thermally activated plastic deformation, a viscous material will lose energy through a loading cycle. Plastic deformation results in lost energy, which is uncharacteristic of a purely elastic material's reaction to a loading cycle
[1]
.
Specifically, viscoelasticity is a molecular rearrangement. When a stress is applied to a viscoelastic material such as a polymer , parts of the long polymer chain change position.
This movement or rearrangement is called Creep . Polymers remain a solid material even when these parts of their chains are rearranging in order to accompany the stress, and as this occurs, it creates a back stress in the material. When the back stress is the same magnitude as the applied stress, the material no longer creeps. When the original stress is
4
taken away, the accumulated back stresses will cause the polymer to return to its original form. The material creeps, which gives the prefix visco-, and the material fully recovers, which gives the suffix -elasticity [2] .
[ edit ] Types of viscoelasticity
Linear viscoelasticity is when the function is separable in both creep response and load.
All linear viscoelastic models can be represented by a Volterra equation connecting stress and strain : or where
t is time
σ(t)
is stress
ε(t)
is strain
E inst,creep
K(t)
and
is the
E inst,relax creep
are instantaneous
function elastic moduli for creep and relaxation
F(t) is the relaxation function
Linear viscoelasticity is usually applicable only for small deformations .
Nonlinear viscoelasticity is when the function is not separable. It is usually happens when the deformations are large or if the material changes its properties under deformations.
An anelastic material is a special case of a viscoelastic material: an anelastic material will fully recover to its original state on the removal of load.
[ edit ] Dynamic modulus
Main article: Dynamic modulus
Viscoelasticity is studied using dynamic mechanical analysis . When we apply a small oscillatory strain and measure the resulting stress.
5
Purely elastic materials have stress and strain in phase, so that the response of one caused by the other is immediate.
In purely viscous materials, strain lags stress by a 90 degree phase lag.
Viscoelastic materials exhibit behavior somewhere in the middle of these two types of material, exhibiting some lag in strain.
Complex Dynamic modulus G can be used to represent the relations between the oscillating stress and strain:
G = G ' + iG '' where i
2
= − 1; G ' is the storage modulus and G '' is the loss modulus : where σ
0
and are the amplitudes of stress and strain and δ is the phase shift between them.
[ edit ] Constitutive models of linear viscoelasticity
Viscoelastic materials, such as amorphous polymers, semicrystalline polymers, and biopolymers, can be modeled in order to determine their stress or strain interactions as well as their temporal dependencies. These models, which include the Maxwell model , the Kelvin-Voigt model , and the Standard Linear Solid Model , are used to predict a material's response under different loading conditions. Viscoelastic behavior is comprised of elastic and viscous components modeled as linear combinations of springs and dashpots , respectively. Each model differs in the arrangement of these elements, and all of these viscoelastic models can be equivalently modeled as electrical circuits. In an equivalent electrical circuit, stress is represented by voltage, and the derivative of strain
(velocity) by current. The elastic modulus of a spring is analogous to a circuit's capacitance (it stores energy) and the viscosity of a dashpot to a circuit's resistance (it dissipates energy).
The elastic components, as previously mentioned, can be modeled as springs of elastic constant E, given the formula: where σ is the stress, E is the elastic modulus of the material, and ε is the strain that occurs under the given stress, similar to Hooke's Law .
The viscous components can be modeled as dashpots such that the stress-strain rate relationship can be given as,
6
where σ is the stress, η is the viscosity of the material, and dε/dt is the time derivative of strain.
The relationship between stress and strain can be simplified for specific stress rates. For high stress states/short time periods, the time derivative components of the stress-strain relationship dominate. A dashpots resists changes in length, and in a high stress state it can be approximated as a rigid rod. Since a rigid rod cannot be stretched past its original length, no strain is added to the system [3]
Conversely, for low stress states/longer time periods, the time derivative components are negligible and the dashpot can be effectively removed from the system - an "open" circuit.
As a result, only the spring connected in parallel to the dashpot will contribute to the total strain in the system
[3]
[
edit
] Maxwell model
Main article: Maxwell material
Maxwell model
The Maxwell model can be represented by a purely viscous damper and a purely elastic spring connected in series, as shown in the diagram. The model can be represented by the following equation:
.
Under this model, if the material is put under a constant strain, the stresses gradually relax , When a material is put under a constant stress, the strain has two components. First, an elastic component occurs instantaneously, corresponding to the spring, and relaxes immediately upon release of the stress. The second is a viscous component that grows with time as long as the stress is applied. The Maxwell model predicts that stress decays exponentially with time, which is accurate for most polymers. One limitation of this model is that it does not predict creep accurately. The Maxwell model for creep or constant-stress conditions postulates that strain will increase linearly with time. However, polymers for the most part show the strain rate to be decreasing with time
[2]
.
7
Application to soft solids:thermoplastic polymers in the vicinity of their melting temperature, fresh concrete ( neglecting its ageing), numerous metals at a temperature close to their melting point.
[
edit
] Kelvin–Voigt model
Main article: Kelvin–Voigt material
Schematic representation of Kelvin–Voigt model.
The Kelvin–Voigt model, also known as the Voigt model, consists of a Newtonian damper and Hookean elastic spring connected in parallel, as shown in the picture. It is used to explain the creep behaviour of polymers.
The constitutive relation is expressed as a linear first-order differential equation:
This model represents a solid undergoing reversible, viscoelastic strain. Upon application of a constant stress, the material deforms at a decreasing rate, asymptotically approaching the steady-state strain. When the stress is released, the material gradually relaxes to its undeformed state. At constant stress (creep), the Model is quite realistic as it predicts strain to tend to σ/E as time continues to infinity. Similar to the Maxwell model, the
Kelvin–Voigt model also has limitations. The model is extremely good with modelling creep in materials, but with regards to relaxation the model is much less accurate.
Applications: organic polymers, rubber, wood when the load is not too high.
[
edit
] Standard linear solid model
Main article: Standard linear solid model
8
Schematic representation of the Standard Linear Solid model.
The Standard Linear Solid Model effectively combines the Maxwell Model and a
Hookean spring in parallel. A viscous material is modeled as a spring and a dashpot in series with each other, both of which are in parallel with a lone spring. For this model, the governing constitutive relation is:
Under a constant stress, the modeled material will instantaneously deform to some strain, which is the elastic portion of the strain, and after that it will continue to deform and asymptotically approach a steady-state strain. This last portion is the viscous part of the strain. Although the Standard Linear Solid Model is more accurate than the Maxwell and
Kelvin-Voigt models in predicting material responses, mathematically it returns inaccurate results for strain under specific loading conditions and is rather difficult to calculate.
[
edit
] Generalized Maxwell Model
Main article: Generalized Maxwell Model
Schematic of Maxwell-Wiechert Model
The Generalized Maxwell also known as the Maxwell-Wiechert model (after James Clerk
Maxwell and Emil Wiechert ) is the most general form of the models described above. It takes into account that relaxation does not occur at a single time, but at a distribution of times. Due to molecular segments of different lengths with shorter ones contributing less than longer ones, there is a varying time distribution. The Wiechert model shows this by having as many spring-dashpot Maxwell elements as are necessary to accurately represent the distribution. The Figure on the right represents a possible Wiechert model
[4]
.
Applications : metals and alloys at temperatures lower than one quarter of their absolute melting temperature (expressed in K).
9
[ edit ] Effect of temperature on viscoelastic behavior
The secondary bonds of a polymer constantly break and reform due to thermal motion.
Application of a stress favors some conformations over others, so the molecules of the polymer will gradually "flow" into the favored conformations over time [5] . Because thermal motion is one factor contributing to the deformation of polymers, viscoelastic properties change with increasing or decreasing temperature. In most cases, the creep modulus, defined as the ratio of applied stress to the time-dependent strain, decreases with increasing temperature. Generally speaking, an increase in temperature correlates to a logarithmic decrease in the time required to impart equal strain under a constant stress.
In other words, it takes less work to stretch a viscoelastic material an equal distance at a higher temperature than it does at a lower temperature.
[ edit ] Viscoelastic creep
Main article: Creep (deformation) a) Applied stress and b) induced strain (b) as functions of time over a short period for a viscoelastic material.
When subjected to a step constant stress, viscoelastic materials experience a timedependent increase in strain. This phenomenon is known as viscoelastic creep.
At a time t
0
, a viscoelastic material is loaded with a constant stress that is maintained for a sufficiently long time period. The material responds to the stress with a strain that increases until the material ultimately fails. When the stress is maintained for a shorter
10
time period, the material undergoes an initial strain until a time t
1
, after which the strain immediately decreases (discontinuity) then gradually decreases at times t > t
1
to a residual strain.
Viscoelastic creep data can be presented by plotting the creep modulus (constant applied stress divided by total strain at a particular time) as a function of time
[6]
. Below its critical stress, the viscoelastic creep modulus is independent of stress applied. A family of curves describing strain versus time response to various applied stress may be represented by a single viscoelastic creep modulus versus time curve if the applied stresses are below the material's critical stress value.
Viscoelastic creep is important when considering long-term structural design. Given loading and temperature conditions, designers can choose materials that best suit component lifetimes.
[ edit ] Measuring viscoelasticity
Though there are many instruments that test the mechanical and viscoelastic response of materials, broadband viscoelastic spectroscopy (BVS) and resonant ultrasound spectroscopy (RUS) are more commonly used to test viscoelastic behavior because they can be used above and below ambient temperatures and are more specific to testing viscoelasticity. These two instruments employ a damping mechanism at various frequencies and time ranges with no appeal to time-temperature superposition
[7]
. Using
BVS and RUS to study the mechanical properties of materials is important to understanding how a material exhibiting viscoelasticity will perform [7] .
[ edit ] See also
Viscoplasticity
Bingham plastic
Polymer
Creep
Stress relaxation
Hysteresis
Biomaterial
Biomechanics
Rubber Elasticity
Rheology
Physics of glass
Glass transition
[ edit ] References
1.
^ a b c d e f g h i j Meyers and Chawla (1999): "Mechanical Behavior of Materials,"
98-103.
11
2.
^ a b c d McCrum, Buckley, and Bucknell (2003): "Principles of Polymer
Engineering," 117-176.
3.
^ a b Van Vliet, Krystyn J. (2006); "3.032 Mechanical Behavior of Materials", [1]
4.
^ Roylance, David (2001); "Engineering Viscoelasticity", 14-15
5.
^ S.A. Baeurle, A. Hotta, A.A. Gusev, Polymer 47 , 6243-6253 (2006).
6.
^ Rosato, et al. (2001): "Plastics Design Handbook," 63-64.
7.
^ a b Rod Lakes (1998): Viscoelastic solids , CRC Press.
Silbey and Alberty (2001): Physical Chemistry , 857. John Wiley & Sons, Inc.
Allen and Thomas (1999): "The Structure of Materials," 51.
Crandal et al. (1999): "An Introduction to the Mechanics of Solids" 348
J.Lemaitre and J.L. Chaboche (1994)" Mechanics of solid materials"
Viscoplasticity
From Wikipedia, the free encyclopedia
Jump to: navigation , search
This article may contain original research or unverified claims . Please improve the article by adding references . See the talk page for details. (May 2008)
This article does not cite any references or sources . Please help improve this article by adding citations to reliable sources . Unsourced material may be challenged and removed . (May 2008)
In contrast to elastic theories, plasticity is the behavior, where the material would undergo unrecoverable deformations due to the response of applied forces. There are several models for plasticity. Viscoplasticity , for instance, is one of the famous models of plasticity. It is defined as a rate-dependent plasticity model. Rate dependent plasticity is important for (high-speed) transient plasticity calculations. It should be used, however, in combination with a plasticity law. In that aspect, viscoplastic solids exhibit permanent deformations after the application of loads but continue to undergo a creep flow as a function of time under the influence of the applied load (equilibrium is impossible).
Similar to viscoelasticity , such materials are represented by a combination of non-linear dashpot elements, Hookean spring elements and sliding frictional elements. As shown in
Fig1, E is the modulus of elasticity, λ is the viscosity parameter and N is another parameter that represents non-linear dashpot [σ(dε/dt)= σ = λ(dε/dt) (1/N) ]. It is good to mention that the sliding element could have a yield stress that is strain rate dependent, or even constant, as shown in Fig 1c. In that aspect, dashpot contributes to the viscosity of the material, while the spring contributes to the elastic behavior. Some rheological models will be presented throughout this text.
[1]
In this text, a brief overview is presented about the viscoplasticity theory, starting with the background history, and ending with some proposed models with their response to creep, stress relaxation and strain hardening tests.
12
Fig1: Elements of Viscoplasticity
Contents
[ hide ]
1 Background
2 Domain of validity and use
3 Phenomenological aspects o 3.1 Strain hardening test
o 3.2 Creep test o 3.3 Relaxation test
4 Rheological models o 4.1 Perfectly viscoplastic solid
o 4.2 Elastic perfectly viscoplastic solid o 4.3 Elastoviscoplastic hardening solid
5 Strain-rate dependent plasticity models
5.1 Perzyna formulation o o o
5.2 Duvaut–Lions formulation
5.3 Flow stress models
5.3.1 Johnson–Cook flow stress model
5.3.2 Steinberg–Cochran–Guinan–Lund flow stress model
5.3.3 Zerilli–Armstrong flow stress model
5.3.4 Mechanical threshold stress flow stress model
5.3.5 Preston–Tonks–Wallace flow stress model
6 See also
7 References
[ edit ] Background
The research work about plasticity started in 1864, while studying the maximum shear criterion. Another criteria is the von Mises theory. In 1930, Prager and Hohenemser proposed the first model for the maximum shear criterion. This was a generalization of
13
Bingham model. However, the application of these established theories did not begin before 1950, where limit theorems were discovered. In viscoplasticity, the development of a mathematical model heads back to 1910 with the representation of primary creep by
Andrew’s law. In 1929, Norton developed a model which links the rate of secondary creep to the stress. Basically, that simple model was represented by a dashpot. In 1934,
Odqvist’s generalization, of Norton’s law to the multi-axial case, was established.
[1]
In 1960, the first IUTAM Symposium “Creep in Structures” organized by Hoff provided a great development in viscoplasticity with the works of Hoff, Rabotnov, Perzyna, Hult, and Lemaitre for the isotropic hardening laws, and those of Kratochvil, Malinini and
Khadjinsky, Ponter and Leckie, and Chaboche for the kinematic hardening laws. For instance, Perzyna, in 1963, introduced a viscosity coefficient that is temperature and time dependent.
[2] The formulated models were supported by the thermodynamics of irreversible processes and the phenomenological standpoint.
[1] Furthermore, several constitutive laws have been presented, taking into account the material characteristic such as: perfectly viscoplastic, viscoplasticity with isoropic or kinematic hardening etc.
In general, viscoplasticity theories are considered in areas such as:
- The calculation of permanent deformations
- The prediction of the plastic collapse of structures
- The investigation of stability
- Crash simulations
- Systems exposed to high temperatures such as turbines in engines, e.g a powerplant
- Dynamic problems and systems exposed to high strain rates
[ edit ] Domain of validity and use
In contrast to plasticity, the viscoplasticity theory explains the flow by creep, which is time dependent. For metals and alloys, it corresponds to a mechanism linked to the movement of dislocations in grains deviation, polygonization-with superposed effects of inter-crystalline gliding. The mechanism begins to arise as soon as the temperature is greater than approximately one third of the absolute melting temperature. However, certain alloys exhibit viscoplasticity at room temperature (300K). Time effect must be taken into consideration as well. For polymers, wood, and bitumen, the theory of viscoplasticity must be used as soon as the load has passed the limit of elasticity or viscoelasticity.
[1] Some materials, where viscoplasticity is highly required, at high strain rates, are:
- Polymers
14
- Wood and bitumen
- Metals exposed to extremely high temperatures
[ edit ] Phenomenological aspects
For a qualitative analysis, several characteristic tests are performed to describe the phenomenology of viscoplastic materials. Some examples of these tests are (i) hardening tests at constant stress or strain rate, (ii) creep tests at constant force, and (iii) stress relaxation at constant elongation.
[
edit
] Strain hardening test
One consequence of yielding is that as plastic deformation proceeds, an increase in stress is required to produce additional strain. This phenomenon is known as Strain/Work hardening.
[3]
For a viscoplastic material the hardening curves are not significantly different from those of plastic material. Nevertheless, three essential differences are apparent:
Fig2: (a) Strain Hardening (b) Immediate response to different strain Rate
- At the same strain, the higher the rate of strain is, the higher the stress will be.
- A change in the rate of strain during the test results in an immediate change in the stress–strain curve. (See Fig 2b)
- The concept of a plastic yield limit is no longer strictly applicable.
The hypothesis of partitioning the strains by decoupling is still applicable in most cases
(where the strains are small):
15
ε = ε e
+ ε p where:
ε e
= the linear elastic strain.
ε p
= the viscoplastic strain.
[
edit
] Creep test
Fig3: Creep test
Creep is the tendency of a solid material to slowly move or deform permanently under constant stresses. Creep tests measure the strain response due to a constant stress as shown in Fig3. The classical creep curve represents the evolution of strain as a function of time in a material subjected to uniaxial stress at a constant temperature. The creep test, for instance, is performed by applying a constant force/stress and analyzing the strain response of the system. See Fig 3a. In general, this curve usually shows three phases or periods of behavior: [3]
- A primary creep stage, also known as transient creep, is the starting stage during which hardening of the material leads to a decrease in the rate of flow which is initially very high. (0 ≤ ε ≤ ε
1
)
- The secondary creep stage, also known as the steady state, is where the strain rate is constant. (ε
1
≤ ε ≤ ε
2
)
- A tertiary creep phase in which the usual increase in the strain rate up to the fracture strain. (ε
2
≤ ε ≤ ε
R
)
[
edit
] Relaxation test
16
Fig4: Relaxation test
As shown in Fig 4, the relaxation test [1] is defined as the stress response due to a constant strain for a period of time. In viscoplastic materials, Relaxation tests demonstrate the stress relaxation in uniaxial loading at a constant strain. In fact, these tests characterize the viscosity and can be used to determine the relation which exists between the stress and the rate of viscoplasticity strain. Hence, the decompositon of strain rate is shown as follows: dε/dt = dε e
/dt + dε p
/dt
Where the linear elasticity dε e
/dt = −(dσ/dt)/E. Thus, each point on the relaxation curve
σ(t) gives the stress and rate of viscoplastic strain.
For a total of zero strain rate, subsituting both equations we get dε p
/dt = −(dσ/dt)/E
.
[ edit ] Rheological models
Several constitutive models for viscoplasticity have been developed. The most famous models are the following: [1]
- Perfectly viscoplastic solid,
- Elastic perfectly viscoplastic solid
- Elastoviscoplastic Hardening Solid
Before illustrating the earlier defined models, it is good to note that:
- In series connection, the strain is additive while the stress is equal in each element.
- In parallel connection, the stress is additive while the strain is equal in each element.
[
edit
] Perfectly viscoplastic solid
17
Fig5: Norton Model for perfectly viscoplastic solid
Considering the simple Norton Model, the perfectly viscoelastic solid is represented in
Fig5. The rate of stress (as for viscous fluids) is a function of the rate of permanent strain :
σ(dε/dt)= σ = λ(dε/dt) (1/N)
N = A fitting parameter, when N = 1.0, the solid is viscoelastic . These models could be applied in metals and alloys at temperatures higher than one third of their absolute melting point (in Kelvin) and polymers/asphalt at elevated temperature. λ = The kinematic viscosity of the material. The responses for strain hardnenning, creep, and relaxation tests of such material are shown in Fig 7.
[1]
[
edit
] Elastic perfectly viscoplastic solid
Fig6: The elastic perfectly viscoplastic material
Using Bingham–Norton model ( Bingham plastic ), the elasticity is no longer considered negligible but the rate of plastic strain is only a function of the stress . There is no influence of hardening. See Fig 6 for such model. The sliding material shown in the following figure represents a constant yielding stress when the elastic limit is exceeded irrespective of the strain.
|σ| < σ y
→
ε = ε e
=σ⁄E
|σ| ≥ σ y
→ ε = ε e
+ ε p dε/dt =(dσ/dt) ⁄ E + f(σ)
The responses for strain hardnenning, creep, and relaxation tests of such material are shown in Fig 8.
[1]
18
[
edit
] Elastoviscoplastic hardening solid
This is the most complex schematic representation because the stress depends on the plastic strain rate and on the plastic strain itself. The elastoviscoplastic material is similar to the elastic perfectly viscoplastic solid, but after exceeding the yield stress, the stress starts to increase beyond the yielding point (Strain Hardening). Basically, the yield stress in the sliding element increases with strain, as shown below: |σ| < σ s
→ ε = ε e
= σ ⁄ E |σ| ≥
σ s
→ ε = ε e
+ ε p
σ = Eε e
= f(ε p
, dε p
/dt) This model is adopted when metals and alloys are at medium and higher temperatures and wood under high loads.
[1] The responses for strain hardnenning, creep, and relaxation tests of such material are shown in Fig 9.
Fig7: The response of perfectly viscoplastic solid to hardening, creep and relaxation tests [1]
19
Fig8: The response of elastic perfectly viscoplastic solid to hardening, creep and relaxation tests [1]
Fig9: The response of elastoviscoplastic hardening solid to hardening, creep and relaxation tests [1]
[ edit ] Strain-rate dependent plasticity models
20
Classical, phenomenological, viscoplasticity models for small strains are usually categorized into two types:
[4]
the Perzyna formulation
the Duvaut–Lions formulation
[
edit
] Perzyna formulation
In the Perzyna formulation the plastic strain rate is assumed to be given by a constitutive relation of the form where f (.,.) is a yield function , is the Cauchy stress , is a set of internal variables, τ is a relaxation time.
[
edit
] Duvaut–Lions formulation
The Duvaut–Lions formulation is equivalent to the Perzyna formulation and may be expressed as where is the closest point projection of the stress state on to the boundary of the region that bounds all possible elastic stress states.
[
edit
] Flow stress models
The quantity represents the evolution of the yield surface . The yield function f is often expressed as an equation consisting of some invariant of stress and a model for the yield stress (or plastic flow stress). An examaple is von Mises or J
2
plasticity. In those situations the plastic strain rate is calculated in the same manner as in rate-independent plasticity. In other situations, the yield stress model provides a direct means of computing the plastic strain rate.
Numerous empirical and semi-empirical flow stress models are used the computational plasticity. The following temperature and strain-rate dependent models provide a sampling of the models in current use:
1.
the Johnson–Cook model
21
2.
the Steinberg–Cochran–Guinan–Lund model.
3.
the Zerilli–Armstrong model.
4.
the Mechanical Threshold Stress model.
5.
the Preston–Tonks–Wallace model.
The Johnson–Cook (JC) model
[5]
is purely empirical and is the most widely used of the five. However, this model exhibits an unrealistically small strain-rate dependence at high temperatures. The Steinberg–Cochran–Guinan–Lund (SCGL) model
[6] [7] is semiempirical. The model is purely empirical and strain-rate independent at high strain-rates.
A dislocation-based extension based on
[8]
is used at low strain-rates. The SCGL model is used extensively by the shock physics community. The Zerilli–Armstrong (ZA) model [9] is a simple physically-based model that has been used extensively. A more complex model that is based on ideas from dislocation dynamics is the Mechanical Threshold
Stress (MTS) model [10] . This model has been used to model the plastic deformation of copper, tantalum
[11]
, alloys of steel
[12] [13]
, and aluminum alloys
[14]
. However, the MTS model is limited to strain-rates less than around 10
7
/s. The Preston–Tonks–Wallace (PTW) model
[15]
is also physically based and has a form similar to the MTS model. However, the PTW model has components that can model plastic deformation in the overdriven shock regime (strain-rates greater that 10
7
/s). Hence this model is valid for the largest range of strain-rates among the five flow stress models.
[ edit ] Johnson–Cook flow stress model
The Johnson–Cook (JC) model
[5]
is purely empirical and gives the following relation for the flow stress (σ y
) where is the equivalent plastic strain, is the plastic strain-rate, and A , B , C , n , m are material constants.
The normalized strain-rate and temperature in equation (1) are defined as where is a user defined plastic strain-rate, T
0
is a reference temperature, and T m
is a reference melt temperature. For conditions where T
*
< 0, we assume that m = 1.
[ edit ] Steinberg–Cochran–Guinan–Lund flow stress model
The Steinberg–Cochran–Guinan–Lund (SCGL) model is a semi-empirical model that was developed by Steinberg et al.
[6]
for high strain-rate situations and extended to low strainrates and bcc materials by Steinberg and Lund
[7]
. The flow stress in this model is given by
22
where σ a
is the athermal component of the flow stress, is a function that represents strain hardening, σ t
is the thermally activated component of the flow stress, μ( p , T ) is the pressure- and temperature-dependent shear modulus, and μ
0
is the shear modulus at standard temperature and pressure. The saturation value of the athermal stress is σ max
.
The saturation of the thermally activated stress is the Peierls stress (σ p
). The shear modulus for this model is usually computed with the Steinberg–Cochran–Guinan shear modulus model .
The strain hardening function ( f ) has the form where β, n are work hardening parameters, and is the initial equivalent plastic strain.
The thermal component (σ t
) is computed using a bisection algorithm from the following equation
[8] [7]
. where 2 U k
is the energy to form a kink-pair in a dislocation segment of length L d
, k b
is the
Boltzmann constant , σ p
is the Peierls stress . The constants C
1
, C
2
are given by the relations where ρ d
is the dislocation density , L d
is the length of a dislocation segment, a is the distance between Peierls valleys , b is the magnitude of the Burgers vector , ν is the Debye frequency , w is the width of a kink loop , and D is the drag coefficient .
[ edit ] Zerilli–Armstrong flow stress model
The Zerilli–Armstrong (ZA) model
[9] [16] [17]
is based on simplified dislocation mechanics.
The general form of the equation for the flow stress is
In this model, σ a
is the athermal component of the flow stress given by
23
where σ g
is the contribution due to solutes and initial dislocation density, k h
is the microstructural stress intensity, l is the average grain diameter, K is zero for fcc materials,
B , B
0
are material constants.
In the thermally activated terms, the functional forms of the exponents α and β are where α
0
,α
1
,β
0
,β
1
are material parameters that depend on the type of material (fcc, bcc, hcp, alloys). The Zerilli–Armstrong model has been modified by
[18]
for better performance at high temperatures.
[ edit ] Mechanical threshold stress flow stress model
The Mechanical Threshold Stress (MTS) model
[10] [19] [20]
) has the form where σ a
is the athermal component of mechanical threshold stress, σ i
is the component of the flow stress due to intrinsic barriers to thermally activated dislocation motion and dislocation-dislocation interactions, σ e
is the component of the flow stress due to microstructural evolution with increasing deformation (strain hardening), ( S i
, S e
) are temperature and strain-rate dependent scaling factors, and μ
0
is the shear modulus at 0 K and ambient pressure.
The scaling factors take the Arrhenius form where k b
is the Boltzmann constant, b is the magnitude of the Burgers' vector, ( g
0 i
, g
0 e
) are normalized activation energies, (
( q i
, p i
, q e
, p e
) are constants.
) are constant reference strain-rates, and
24
The strain hardening component of the mechanical threshold stress (σ e
) is given by an empirical modified Voce law where and θ
0
is the hardening due to dislocation accumulation, θ
IV
is the contribution due to stage-IV hardening, ( a
0
, a
1
, a
2
, a
3
,α) are constants, σ es
is the stress at zero strain hardening rate, σ
0 es
is the saturation threshold stress for deformation at 0 K, g
0 es
is a constant, and is the maximum strain-rate. Note that the maximum strain-rate is usually limited to about 10 7 /s.
[ edit ] Preston–Tonks–Wallace flow stress model
The Preston–Tonks–Wallace (PTW) model
[15]
attempts to provide a model for the flow stress for extreme strain-rates (up to 10 11 /s) and temperatures up to melt. A linear Voce hardening law is used in the model. The PTW flow stress is given by with
25
where τ s
is a normalized work-hardening saturation stress, s
0
is the value of τ s
at 0K, τ y
is a normalized yield stress, θ is the hardening constant in the Voce hardening law, and d is a dimensionless material parameter that modifies the Voce hardening law.
The saturation stress and the yield stress are given by where is the value of τ s
close to the melt temperature, (
0K and close to melt, respectively, (κ,γ) are material constants, are material parameters for the high strain-rate regime, and
) are the values of τ y
at
, ( s
1
, y
1
, y
2
) where ρ is the density, and M is the atomic mass.
[ edit ] See also
Viscoelasticity
Bingham plastic
Dashpot
Creep
Plasticity (physics)
Continuum mechanics
[ edit ] References
1.
^ J.Lemaitre and J.L.Chaboche (2002) "Mechanics of solid materials" Cambridge
University Press.
2.
^ Lubliner, Jacob (1990) "PLASTICITY THEORY," Macmillan Publishing
Company, NY.
3.
^ Young, Mindness, Gray, ad Bentur (1998): "The Science and Technology of
Civil Engineering Materials," Prentice Hall, NJ.
4.
^ Simo, J.C.; Hughes, T.J.R. (1998), Computational inelasticity
5.
^ a b Johnson, G.R.; Cook, W.H. (1983), " A constitutive model and data for metals subjected to large strains, high strain rates and high ", Proceedings of the
26
7th International Symposium on Ballistics : 541–547, http://www.lajss.org/HistoricalArticles/A%20constitutive%20model%20and%20d ata%20for%20metals.pdf
, retrieved 2009-05-13
6.
^ a b Steinberg, D.J.; Cochran, S.G.; Guinan, M.W. (1980), " A constitutive model for metals applicable at high-strain rate ", Journal of Applied Physics 51 : 1498, http://link.aip.org/link/?JAPIAU/51/1498/1 , retrieved 2009-05-13
7.
^ a b c Steinberg, D.J.; Lund, C.M. (1988), " A constitutive model for strain rates from 10
−4
to 10
6
s
−1
", Journal de physique. Colloques 49 (3): 3–3, http://cat.inist.fr/?aModele=afficheN , retrieved 2009-05-13
8.
^ a b Hoge, K.G.; Mukherjee, A.K. (1977), " The temperature and strain rate dependence of the flow stress of tantalum ", Journal of Materials Science 12 (8):
1666–1672, http://www.springerlink.com/index/Q406613278W585P7.pdf
, retrieved 2009-05-13
9.
^ a b Zerilli, F.J.; Armstrong, R.W. (1987), " Dislocation-mechanics-based constitutive relations for material dynamics calculations ", Journal of Applied
Physics 61 : 1816, http://link.aip.org/link/?JAPIAU/61/1816/1 , retrieved 2009-05-
13
10.
^ a b Follansbee, P.S.; Kocks, U.F. (1988), " A constitutive description of the deformation of copper based on the use of the mechanical threshold ", Acta Metall.
36 (1): 81–93, http://www.csa.com/partners/viewrecord.php?requester=gs , retrieved 2009-05-13
11.
^ Chen, S.R.; Gray, G.T. (1996), " Constitutive behavior of tantalum and tantalum-tungsten alloys ", Metallurgical and Materials Transactions A 27 (10):
2994–3006, http://www.springerlink.com/index/D65G5112T720L7N5.pdf
, retrieved 2009-05-13
12.
^ Goto, D.M.; Garrett, R.K.; Bingert, J.F.; Chen, S.R.; Gray, G.T. (2000), " The mechanical threshold stress constitutive-strength model description of HY-100 steel ", Metallurgical and Materials Transactions A 31 (8): 1985–1996, http://www.springerlink.com/index/N4820676MU264G8H.pdf
, retrieved 2009-
05-13
13.
^ Banerjee, B. (2007), " The Mechanical Threshold Stress model for various tempers of AISI 4340 steel ", International Journal of Solids and Structures 44 (3–
4): 834–859, http://arxiv.org/pdf/cond-mat/0510330 , retrieved 2009-05-13
14.
^ Puchi-cabrera, E.S.; Villalobos-gutierrez, C.; Castro-farinas, G. (2001), " On the mechanical threshold stress of aluminum: Effect of the alloying content ", Journal of Engineering Materials and Technology 123 : 155, http://link.aip.org/link/?JEMTA8/123/155/1 , retrieved 2009-05-13
15.
^ a b Preston, D.L.; Tonks, D.L.; Wallace, D.C. (2003), " Model of plastic deformation for extreme loading conditions ", Journal of Applied Physics 93 : 211, http://link.aip.org/link/?JAPIAU/93/211/1 , retrieved 2009-05-13
16.
^ Zerilli, F.J.; Armstrong, R.W. (1994), " Constitutive relations for the plastic deformation of metals ", AIP Conference Proceedings 309 : 989, http://link.aip.org/link/?APCPCS/309/989/1 , retrieved 2009-05-13
17.
^ Zerilli, F.J. (2004), " Dislocation mechanics-based constitutive equations ",
Metallurgical and Materials Transactions A 35 (9): 2547–2555, http://www.springerlink.com/index/0406259680452456.pdf
, retrieved 2009-05-13
27
18.
^ Abed, F.H.; Voyiadjis, G.Z. (2005), " A consistent modified Zerilli–Armstrong flow stress model for BCC and FCC metals for elevated ", Acta Mechanica 175
(1): 1–18, http://www.springerlink.com/index/X7WFH0P2PJXK17FH.pdf
, retrieved 2009-05-13
19.
^ Goto, D.M.; Bingert, J.F.; Reed, W.R.; Garrett Jr, R.K. (2000), " Anisotropycorrected MTS constitutive strength modeling in HY-100 steel ", Scripta
Materialia 42 (12): 1125–1131, http://linkinghub.elsevier.com/retrieve/pii/S135964620000347X , retrieved 2009-
05-13
20.
^ Kocks, U.F. (2001), " Realistic constitutive relations for metal plasticity ",
Materials Science & Engineering A 317 (1–2): 181–187, http://linkinghub.elsevier.com/retrieve/pii/S0921509301011741 , retrieved 2009-
05-13
Stress relaxation
From Wikipedia, the free encyclopedia
Jump to: navigation , search
Stress relaxation describes how polymers relieve stress under constant strain. Because they are viscoelastic, polymers behave in a nonlinear , non-Hookean fashion.
[1]
This nonlinearity is described by both stress relaxation and a phenomenon known as creep , which describes how polymers strain under constant stress. a) Applied strain and b) induced stress as functions of time for a viscoelastic material.
Viscoelastic materials have the properties of both viscous and elastic materials and can be modeled by combining elements that represent these characteristics. One viscoelastic
28
model, called the Maxwell model predicts behavior akin to a spring (elastic element) being in series with a dashpot (viscous element), while the Voigt model places these elements in parallel. Although the Maxwell model is good at predicting stress relaxation, it is fairly poor at predicting creep. On the other hand, the Voigt model is good at predicting creep but rather poor at predicting stress relaxation. The most accurate of the viscoelastic models is the Standard Linear Solid model , which combines the characteristics of both the Maxwell and Voigt models to display both creep and stress relaxation (See Viscoelasticity ).
[2]
The following image shows the response of a Standard Linear Solid material to a constant stress, σ
0
, over time from t
0
to a later time t f
. For times greater than t f
the load is removed.
The curvature of the model represent the effects of both creep and stress relaxation.
Stress relaxation calculations can differ for different materials:
To generalize, Obukhov uses power dependencies:
[3] where σ
0
is the maximum stress at the time the loading was removed (t*), and n is a material parameter.
Vegener et al. use a power series to describe stress relaxation in polyamides: [3]
To model stress relaxation in glass materials Dowvalter uses the following:
[3] where α is a material constant and b and t n
depend on processing conditions.
The following non-material parameters all affect stress relaxation in polymers :
[3]
Magnitude of initial loading
Speed of loading
Temperature (isothermal vs non-isothermal conditions)
Loading medium
29
Friction and wear
Long-term storage
[ edit ] See also
Physics of glass
Creep
Viscoelasticity
Standard Linear Solid Model
Maxwell material
Kelvin-Voigt material
[ edit ] References
1.
^ Meyers and Chawla. "Mechanical Behavior of Materials" (1999) ISBN 0-13-
262817-1
2.
^ Fung YC . Biomechanics , 2nd ed. Springer-Verlag, New York (1993). ISBN 0-
387-97947-6
3.
^ a b c d T.M. Junisbekov. "Stress Relaxation in Viscoelastic Materials" (2003)
ISBN 1-57808-258-7
30