Pump,motors summary
advertisement

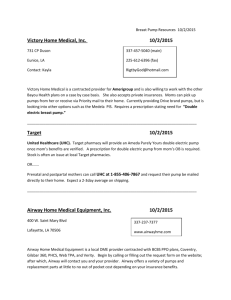
HYDROSTATIC PUMPS AND MOTORS High-pressure hydraulic pumps have a fixed displacement – that is they generate a fixed volume of fluid per revolution so that operating at a fixed speed produces a constant flow. In some units the displacement can be varied. Different types of fixed displacement pumps and motors are described in Chapter 2, some of which are shown here: Gear type Inlet flow Inlet port Outlet port Inlet port Vane type Outlet port Axial piston type Low speed motor Flow and speed relationship For the ideal machine with no leakage, the displacement of the machine and its speed of rotation determine the flow rate Q. Thus: Q D where D is volumetric displacement [m 3 rad-1 ] is the rotational speed [rad sec-1] (1) For pumps that are driven by electric motors the speed is often constant. However for motors, the speed depends on the level of the supplied flow: Thus: Q D (2) Volumetric efficiency The internal flow leakage in pumps and motors affects the relationship between flow and speed and is taken into account by the use of the volumetric efficiency ( v ). Thus for pumps equation 1 becomes Q v D And for motors equation 2 becomes v (3) Q D (4) The volumetric efficiency varies with the fluid viscosity, pressure and rotating speed as discussed in more detail in chapter 8. Manufacturers will usually give values for the volumetric efficiency for operation at specified conditions. Torque and pressure relationship For the ideal machine, the mechanical power is entirely converted to fluid power, Power = T = P Q (5) Where T is the torque [Nm] P is the differential pressure [N m -2] From equation 5 we get: T QP T PD which from equation 2 gives (6) Thus the ideal torque is proportional to the pressure for a given displacement. In a pump this is the input torque required from the prime mover and for a motor, it is the output torque available from the motor shaft. Mechanical efficiency The presence of friction between the moving parts creates mechanical losses that are represented by the mechanical efficiency ( m ). Thus: For pumps the required input torque is given by T And for motors the output torque is given by: PD m T m PD (7) (8) The mechanical efficiency, as for the volumetric efficiency, will vary with the fluid viscosity, pressure and rotating speed as discussed in more detail in chapter 8. The power input, H, to a pump is: H PQ mv (9) The power output from a motor is: H mv PQ (10) The total efficiency of both units is therefore: T mv Figure 7 Pump Performance Characteristics Figure 8 Motor Performance Characteristics Figures 7 and 8 show how the measured performance of pumps and motors are presented for use with a particular fluid at a particular viscosity. For the pump it can be seen that the flow output reduces with the output pressure at constant speed because of the effect of the increasing leakage flow loss. For the motor, the output torque varies with increasing speed at constant pressure as a result of the variation in the mechanical efficiency. The theoretical analysis given in chapter 8 shows how the efficiencies are related to the system parameters which enables the performance for operation at other conditions to be predict Fluid properties Fluid density, , is the mass per unit volume and has units of kg m-3. The variation in the density of most hydraulic fluids with temperature is relatively small for the normal operating temperature usually encountered in hydraulic systems. For hydraulic oils the value can be taken as 870 kg/m3. Fluid viscosity The viscosity of the fluid can be referred to by: i) Dynamic viscosity, for which the units for are Nsm-2. The technical literature often uses other units. Typically Poise (P) where 1 P = 0.1 Ns m-2 and the centiPoise (cP) where 1 cP = 10-3 Ns m-2. ii) Kinematic viscosity This is more commonly quoted in technical literature and data sheets and is equal to the dynamic viscosity divided by the density. The units for kinematic viscosity are m2 s-1 but it is usually quoted in centiStoke (cSt) 1 cSt = 10-6 m2 s-1. The kinematic viscosity of a typical hydraulic oil varies with temperature and pressure as shown in Figure 1 and it can be seen that the viscosity varies considerably with changes in fluid operating temperature. Figure 1 Oil viscosity variation with pressure and temperature Wilson model for pump/motor efficiencies Laminar flow in parallel leakage spaces h P P y w Flow Q,P c L h Q 2wudy 0 QS C1 P ; wP L 2 P y3 c 3 w P = i.e. h y 3 12 L L 0 h Qt D QS C1 P Qt D For a pump: v Q t QS Q 1 S Qt Qt m Tt 1 Tt T m 1 T m Tt And for motors: Qt 1 Q Q t QS 1 S v m Tt Tm T 1 m Tt Tt Viscous friction torque is expressed by: Tv C2 And the torque ratio, Tv C 2 Tt D P Qt Coulomb friction torque: Tf C3 P C Tf 3 Tt D The total mechanical loss, Tm TV Tf Pump efficiency v P Q t QS 1 Cs Qt m Tt Tt TV Tf 1 1C f Cv P Overall efficiency o v m Overall efficiencey 0 Max 0 P Maximum efficiency occurs at (approximately) when the volumetric and viscous losses are equal. Thus: When P Cs Cv Pump controlled systems (primary control) The pressure level rises to that required to drive the actuator against the load. Consequently, the pump output flow can only be used to drive a single actuator or multiple actuators that are constrained to move at the same velocity (e.g. coupled motors and actuators attached rigidly to the same moving component) The Figure shows the circuit for a hydrostatic transmission used to drive a hydraulic motor that includes: The provision of boost flow to make up for the external losses from the pump and motor. The check valves connect the boost input to the low pressure (unloaded) side of the loop. This applies for both the pump driving the motor and, for overrunning conditions, when the motor is driving the pump (e.g. winch lowering). Crossline relief valves to prevent excessive pressures. The flow is passed to the low pressure side in order to maintain the flow into the pump inlet. The extraction of fluid from the loop using a purge valve to provide increased cooling. This flow needs to be controlled as it has to be made up from the boost flow. Variable motor displacement control for systems requiring a higher speed range at reduced torque