Teaching Street Crossings at Streets and Lanes Where There is No
advertisement

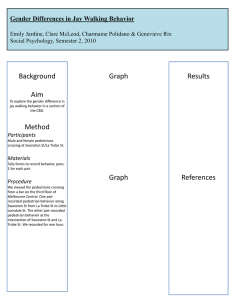
AER Orientation and Mobility Division: Position Paper Teaching Street Crossing at Streets and Lanes Where There Is No Traffic Control Originally approved by O&M Division membership through mail ballot, Spring 2008 Revised 2013 At crosswalks in streets or lanes where vehicles are not controlled by a signal or stop sign (e.g., no traffic control), pedestrians can cross either by relying on drivers to yield, or by crossing when there is a gap in traffic long enough to allow time to cross. Orientation and Mobility (O&M) programs must prepare consumers who are blind or visually impaired to cross at these crosswalks by ensuring that they have the information, strategies, and skills necessary to assess these situations. Strategies and skills include maximizing detection / assessment of approaching vehicles, recognizing gaps in traffic that are long enough to cross and being able to determine when you cannot do so, determining yields at the crossing point, and evaluating risk of crossing--including the likelihood that vehicles that they didn’t detect when they started their crossing could reach them and the likelihood that these drivers will yield to them. These strategies and skills support informed decisions concerning street crossings, and are based on information and knowledge about driver behavior, yielding likelihood, elements of risk, and individual visual and auditory abilities. Traditional O&M techniques for crossing at streets with no traffic control (Allen, Barbier, Griffith, Kern, & Shaw, 1997; Hill & Ponder, 1976; Jacobson, 1993; LaGrow & Weessies, 1994) have relied on the ability of pedestrians who are blind or visually impaired and have normal hearing to be able to hear approaching vehicles well enough when it is quiet to be assured that, whenever it is quiet and they hear no approaching vehicles, there is a sufficient gap in traffic. Although this strategy of crossing when quiet is reliable in some situations, research and observations indicate there are situations where it is not possible for a person with normal hearing and walking speed to hear traffic with sufficient warning to be assured that there is a gap in traffic long enough to cross even when it is quiet (Sauerburger, 1989, 1995, 1999, 2006, Snook-Hill & Sauerburger 1996; Wall Emerson, Kim, Naghshineh, Pliskow, & Myers, 2011, Wall Emerson & Sauerburger, 2008). More recent texts (e.g., Long & LaGrow, 2011) highlight the relative risks of crossing with a yield or in a perceived gap when crossing at streets with no traffic control. When relying on vision to gauge gaps in traffic, pedestrians who have low vision perform as well as those with normal vision (Hassan & Massof, 2012) but all pedestrians tend to make better crossing decisions when allowed to use both hearing and vision (Hassan, 2012). Relying on drivers to yield carries some risk as a strategy, as motorists have been found to vary from 17% to 97% in their yielding behavior, depending on factors such as the speed of vehicles, the visibility of pedestrians, number of lanes, pedestrian behavior, presence of a long white cane, and crossing treatments present (crosswalk style, warning flashers, etc. (Bourquin, Wall Emerson, & Sauerburger, 2011; Fitzpatrick, Turner, Brewer, Carlson, Ullman, Trout, Park, Whitacre, Lalani, & Lord, 2006; Geruschat & Hassan, 2005). However, pedestrians can perform actions that will increase the likelihood of yielding. Presence of the long cane increased yielding rates more than an orange vest or red flag when a pedestrian actively crossed a street (Bourquin, Wall Emerson, & Sauerburger, 2011) and an assertive pedestrian who walks briskly toward a crossing also achieved high yielding rates (Schroeder & Rouphail, 2010). A goal of O&M programs is that consumers will have information about crossings with no traffic control, including an understanding of the following: • the fact that, although it is possible to hear or see vehicles well enough in some situations to know it is clear to cross, there are other situations in which it is not possible to determine with certainty that there is a gap in traffic long enough to cross, even when it is quiet and no approaching traffic is visible/audible; • the time they need to cross streets of various widths, taking into consideration their walking pace; • the effects of masking sounds or various lighting/visual conditions on their ability to hear or see approaching traffic; • the pedestrian and white cane laws regarding right-of-way; • the likelihood that drivers of approaching vehicles will yield or avoid hitting them, including: • visibility factors and the ability of drivers to see the pedestrian from a safe distance, given the drivers’ need for perception/braking time • the volume and speed of traffic • the effect of various road conditions on drivers’ ability to yield • information about the yielding behavior of drivers in the consumers’ area • information about the existence of bad drivers, such as those who are distracted or driving under the influence, etc.; • alternatives to crossing streets independently. In addition, among the goals of O&M instruction are that consumers will have the following: • strategies to maximize their detection of approaching vehicles by audition and/or vision, including an awareness of when it is appropriate to use which strategy; • strategies that enable them to assess their ability to detect vehicles including being able to: • analyze the width of the street and determine the time needed for crossing, taking into consideration their walking pace; • recognize situations where they cannot hear or see well enough to reliably predict gaps in traffic; • determine the probability that a vehicle that was undetected at the beginning of the crossing could reach them before the crossing is finished; strategies for increasing the likelihood of drivers’ yielding such as: holding a cane prominently, using an exaggerated arc to begin crossing, stepping one step into a crossing and pausing, facing the direction from which traffic will come in the nearest lane; • techniques for those with sufficient functional vision to • scan / glance efficiently in both or all directions to determine if there are approaching vehicles; • determine if approaching vehicles will allow enough time to complete a crossing; • strategies to determine alternatives that may exist for crossing streets independently, and implement them; • strategies for advocating for features of accessibility and pedestrian safety as needed, such as traffic calming features, traffic control, buildouts, and refuge islands to narrow the crosswalk, or other intersection and environmental modifications. References Allen, W., Courtney-Barbier, A., Griffith, A., Kern, T., & Shaw, C. (1997). Orientation and mobility teaching manual (2nd ed.). New York: CIL Publications. Bourquin, E., Wall Emerson, R., & Sauerburger, D. (2011). Conditions that influence drivers’ yielding behavior for uncontrolled intersections. Journal of Visual Impairment & Blindness, 105(12), 760-769. Fitzpatrick, K., Turner, S., Brewer, M., Carlson, P., Ullman, B., Trout, N., Park, E., Whitacre, J., Lalani, N., & Lord, D. (2006). TCRP Report 112/NCHRP Report 562 – Improving Pedestrian Safety at Unsignalized Crossings. Transit Cooperative Research Program and National Cooperative Highway Research Program, Washington, D.C.: Transportation Research Board. Geruschat, D. R. & Hassan, S. E. (2005). Driver behavior in yielding to sighted and blind pedestrians at roundabouts. Journal of Visual Impairment & Blindness, 99(5), 286-302. Hassan, S. E. (2012). Are normally sighted, visually impaired, and blind pedestrians accurate and reliable at making street crossing decisions? Investigative Ophthalmology & Visual Science, 53(6), 2593-2600. Hassan, S. E. & Massof, R. W. (2012). Measurements of street-crossing decision-making in pedestrians with low vision. Accident Analysis and Prevention, 49, 410-418. Hill, E. W., & Ponder, P. (1976). Orientation and mobility techniques: A guide for the practitioner. New York: American Foundation for the Blind. Jacobson, W. H. (1993). The art and science of teaching orientation and mobility to persons with visual impairments. New York, NY, AFB Press LaGrow, S. J. & Weessies, M. (1994). Orientation and mobility: Techniques for independence. Palmerston North, New Zealand: Dunmore Press. Long, R. & LaGrow, S. J. (2011). Orientation and mobility: Techniques for independence, second edition. Palmerston North, New Zealand: Dunmore Press. Sauerburger, D. (1989). To cross or not to cross: Objective timing methods of assessing street crossings without traffic controls. RE:view, Fall 1989, 153-161. Sauerburger, D. (1995). Safety awareness for crossing streets with no traffic control. Journal of Visual Impairment & Blindness, 89(5), 423-431 Sauerburger, D. (1999). Developing criteria and judgment of safety for crossing streets with gaps in traffic. Journal of Visual Impairment & Blindness, 93(7), 447-450. Sauerburger, D. (2006). Instructional strategies for teaching judgment in detecting gaps for crossing streets with no traffic controls. RE:view, 37(4), 177-188. Schroeder, B. J. & Rouphail, N. M. (2011). Event-based modeling of driver yielding behavior at unsignalized crosswalks. Journal of Transportation Engineering, 137, 455-465. Snook-Hill, M. & Sauerburger, D. (1996). Teaching students to assess safety for crossing streets which have no traffic control. in Proceedings of International Mobility Conference VIII, Tambartun National Resource Centre, Melhus, Norway, 535-540. Wall Emerson, R., Kim, D. S., Naghshineh, K., Pliskow, J., & Myers, K. (2011). Examining the impact of “quiet” vehicles on the performance of orientation and mobility tasks by pedestrians who are blind. Journal of Visual Impairment & Blindness, 105(12), 745-759. Wall Emerson, R. & Sauerburger, D. (2008). Detecting approaching vehicles at streets with no traffic control. Journal of Visual Impairment & Blindness, 102(12), 747-760.