Lecture 8
advertisement

Mechanics of Solids
Chapter 3
1/26
TORSION
3.1 INTRODUCTION
Torsion = the twisting of a structural member when it is loaded by couples that produce
rotation about its longitudinal axis.
Torques are represented:
OR
T1
T2
T1
T2
Both follow the right-hand rule
UNITS: SI Nm
US in-lb or lb-in
ft-lb
lb-ft
3.2 TORSION OF CIRCULAR BARS
Let’s consider PURE TORSION
n
m
n’
γ
= angle of twist ( = phi )
γ = magnitude of shear strain on the outer surface of the bar. m
it is equal to the decrease in the angle nmc at m.
c
tan
n
bb '
ab
sin bb '
cos
ab
But the angle of twist, , is small
(radians)
sin
cos 1
bb '
ab
(a)
Mechanics of Solids
Chapter 3
Arclength:
2/26
bb’ = rd
_____________ ( b )
ab = dx
Thus,
rd
________________ ( c )
dx
d
rate of change of the angle of twist ( ) w.r.t distance x.
dx
let, =
d
angle of twist per unit length (rad / inch)
dx
FROM eqn ( c ):
rd
d
r
dx
dx
r ________________ ( 1 )
L
For pure torsion:
=
FROM eqn ( 1 ):
r
L
where, L = length of the bar and = the angle of twist
________________ ( 2 )
These eqns are based on geometry only. Thus they are good for any circular bar whether
it behaves elastically or inelastically, linearly or nonlinearly.
However, the eqns are limited to bars having small angles of twist & small strains.
3.3 CIRCULAR BARS OF LINEARLY ELASTIC MATERIALS
Shear stresses are related to shear strains in a LINEARLY ELASTIC material by
Hooke’s law.
τ = Gγ Hooke’s law in shear
REF: = E
G = shear modulus of elasticity (modulus of rigidity)
FROM eqn ( 1 ) & Hooke’s Law:
τ = Gγ = Gr
old term
Mechanics of Solids
Chapter 3
3/26
Strains & stresses within the interior of the bar:
LET: ρ = some radius less than radius at outer surface, r.
is max when is max; i.e., = r
τ = Gρ _______________ ( d )
We could go through the analysis which relates Torque ( T ) to the Angle of Twist ( ),
but omitting that, the results are:
T G 2 dA G 2 dA G I p _______ ( e )
Where, I p 2 dA
SOME TEXTS:
Polar Moment of Inertia
J = polar moment
of Inertia
Polar moment of inertia for a circle:
Ip
r4
2
d4
32
T = G Ip __________________ ( 3 )
RECALL:
= L
=
L
total angle of twist
= angle of twist per unit length
Substituting these into eqn ( 3 )
T
G I p
L
Note similarity to:
TL
_____________ ( 4 )
GI p
PL
EA
in radians
G Ip = torsional rigidity
L
= torsional flexibility
GI p
GI p
L
= torsional stiffness
L
EA
( reciprocal of flexibility )
EA
L
Mechanics of Solids
Chapter 3
From eqn ( 3 ):
4/26
T = G Ip
From eqn ( d ):
τ = Gρ
T
GI p
T
G
I
p
G
T
_________________ ( 5 )
Ip
Eqn ( 4 ) gives the shear stress at a distance ρ from the center of a circular bar.
r varies | τ is max at max r
Ip does not vary; based on full x-section
Shear stress is at a maximum when: ρ = r
max
Tr
_________________ ( 6 )
Ip
max shear stress due to torsion in a
circular shaft
Eqns ( 5 ) & ( 6 ) can be combined if we take r as a varying radius in eqn ( 6 ). THEN,
max is at max r ( radius at outer surface ).
Using: r
d
2
and
Ip
d4
32
in Eqn ( 5 ):
max
max
16T
d3
d
T
2
4
d
32
32Td
2 d 4
max shear stress due to torsion in a
circular shaft
HOLLOW CIRCULAR BARS:
Tubes are more efficient in resisting torsional loads because the shear stresses in a solid
bar are a maximum at the outer boundary of the cross section and zero at the center.
Thus most of the material is stressed below maximum.
r1
r2
Mechanics of Solids
Chapter 3
5/26
TL
GI p
provided Ip is calculated correctly.
Eqns ( 4 ) and ( 6 ):
max
Ip
Tr
Ip
r
2
4
2
may be used for hollow circular bars
r14
d
32
4
2
d14
Where r2 , d2 = outer radius, diameter and r1, d1 = inner radius, diameter for the hollow
circular cross section.
If the tube is thin and its thickness, t, is small compared to the radius, r,
then:
I p 2 r 3t
d 3t
4
where,
( i.e., r >> t )
r = ½ ( r2 + r1 ) = average r
d = ½ ( d2 + d1 ) = average d
FROM: Appendx D, pg 896, CASE 22
With respect to torsion, a hollow bar is more efficient than solid bar.
That’s why rear –wheel drive shafts are hollow.
Everything we have done is for bars with circular cross-sections. Noncircular bars
behave much differently.
Mechanics of Solids
Chapter 3
6/26
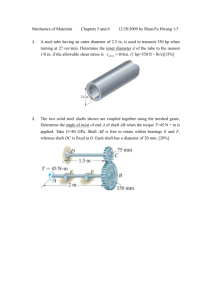
EXAMPLE No. 2:
Determine the maximum allowable torque to which a solid circular steel bar 9 feet long
and 3 inches in diameter can be subject when it is specified that the shearing stress must
not exceed 12,000 psi and the angle of twist must not exceed 2.75° use G = 12 x 106 psi.
SOLn:
Mechanics of Solids
Chapter 3
7/26
EXAMPLE No. 3
The solid shaft of radius c is subjected to a torque, T. Determine the fraction of T that is
resisted by the material contained within the outer region of the shaft.
c
T
SOLn:
c
2
Mechanics of Solids
Chapter 3
8/26
3.4 NONUNIFORM TORSION
Nonuniform torsion differs from pure torsion in that:
1. The bar does not have to be prismatic
2. Applied torques may vary along the length of the bar
T1
T4
1
2
T2
C
T3
A
Knowing the internal torque in each region
allows us to calculate the following for each
section:
1. Angle of Twist
2. Shear Stress
B
For part 1 : 1 τ1
RECALL:
For part 2 : 2 τ2
τmax = max of { τ1 max ; τ2 max }
tot = 1 + 2
( RADIANS )
i max
Ti r
Ip
where:
Ti = internal torque in part i
Ip = P of M for section i
OR
where:
n
TL
i i
i 1 Gi I pi
n = total No. of parts
Ti = internal torque in part i
Note similarity:
n
PL
i i
i 1 Ei Ai
For a bar that has a continuously changing cross-section or torque, the eqn for the angle
of twist is:
d
T ( x) dx
G I p ( x)
Integrating:
L
d
0
L
0
T ( x)
dx
G I p ( x)
Conditions:
1. bars are linearly elastic materials
2. circular cross-section (hollow or solid)
3. formula for shear stress does not apply to stress concentration
areas….angle of twist is unaffected by stress concentrations.
Mechanics of Solids
Chapter 3
9/26
3.5 STRESSES and STRAINS in PURE SHEAR
Stress element:
T
This is PURE SHEAR because only
shear stresses are acting on the
element…..no normal stresses.
τ
Direction of shear stresses depends on
direction of applied torques.
τ
RECALL:
Tr
IP
To determine the stresses acting on a plane inclined to the bar’s longitudinal axis, we do
t
the following:
n
τ dA
dA
σ dA
dA
bar’s longitudinal axis
Text uses this
side as A0
τ dA cos
τ dA sin
Fn = 0
σ dA - τ dA cos sin - τ dA sin cos = 0
σ = 2τ cos sin
[ 2 cos sin = sin2 ]
σ = τ sin2
(1)
Ft = 0
τ dA - τ dA cos cos + τ dA sin sin = 0
τ = τ ( cos2 - sin2 )
[ cos2 - sin2 = cos2 ]
τ = τ cos2
(2)
Mechanics of Solids
Chapter 3
10/26
MAXIMUM & MINIMUM
From egn ( 1 ):
From egn ( 2 ):
σmax = τ
σmin = - τ
at
τmax = τ
= 45° ; 225°
at
τmin = - τ
= 135° ; 315°
From egn ( 2 ):
τ = 0
at
at
= 0° ; 180°
= 90° ; 270°
From egn ( 1 ):
at
σ = 0 at = 0°, 90°, 180°, 270°
= 45°, 135°, 225°, 315°
σmin = - τ
τ
σmax = τ
= 45°
= 0°
τ
σmax = τ
σmin = - τ
At angles other than 45° increments (0°, 45°, 90°, 135°….), there will be both normal
and shear stresses.
These eqns are valid for:
1. stress element in pure shear. Doesn’t matter if the element is from a bar in
torsion or from some other structural element.
2. any material…linearly elastic or not. WHY? Derived only from equilibrium,
nothing to do with properties of material.
Tensile stresses are at a maximum on planes at 45° to the x-axis.
Take a piece of chalk and twist to put it in pure shear. Notice how it fractures along a 45°
helix.
STRESSES
SHEAR DISTORTION
τ
( PURE SHEAR )
τ
τ
π –γ
2
τ
τ
γ
2
γ = shear strain
For Linearly elastic material,
by Hooke’s Law in Shear:
γ= τ
G
Mechanics of Solids
Chapter 3
11/26
OMIT
READ : pg 212 – 214
Strains in Pure Shear
At 45°, the strains are:
σmax = τ
ε1y’
σmin = - τ
y
y’
x’
ε1x’
45°
x
ε2y’
σmin = - τ
σmax = τ
Hooke’s Law:
σ = Eε
OR
1x '
RECALL:
lateral
axial
ε2x’
E
2 y'
E
E
POISSON’S RATIO
lateral axial
1 y ' 1x '
2 x' 2 y'
E
Max strain will occur with max stress
εmax = ε1x’ + ε2x’ =
max
E
(1 )
E
E
E
Mechanics of Solids
Chapter 3
12/26
EXAMPLE No. 1
GIVEN:
The solid steel shaft is in equilibrium when subject to the 3 torques shown.
G = 12,000 ksi
20 k ft-lbs
5 k ft-lbs
6”
4”
TA
9’
FIND:
a. Maximum shearing stress in the shaft
b. The rotation of end C w.r.t. end A
SOLn:
C
B
A
5’
Mechanics of Solids
Chapter 3
13/26
EXAMPLE No. 2
GIVEN:
The cast iron post shown is buried in soil. A torque is applied to its top. Assume the soil
exerts a uniform torsional resistance of t in-lbs/in along the 24 in buried length.
6 in
G = 5.5 x 103 ksi
6 in
25 lbs
FIND:
a. Maximum shearing stress in the post
b. Angle of twist at the top
SOLn:
25 lbs
A
2”
36”
B
C
24”
Mechanics of Solids
Chapter 3
14/26
OMIT
Give eqn ( 2 )
READ: pg 216 - 217
3.6 RELATIONSHIP BETWEEN E and G
b
b
a
Given:
√2 h
a
τ
π
-γ
2
h
c
d
L
d
c
τ
h
Lbd
L
diagonal bd is lengthened by:
bd max 2 h
Therefore:
Lbd 2 h max 2 h
Lbd 2 h 1 max _________________ ( a )
This relates to the shear strain as follows:
π
+γ
2
b
h
Law of Cosines:
a
h
d
Lbd
π
4
γ
2
π
4
γ
2
L2bd h 2 h 2 2h 2 cos __________ ( b )
2
FROM ( a ) & ( b ):
2
2 h 1 max 2h 2 2h 2 cos
2
2
2h 2 1 max 2h 2 1 cos
2
1 max 2 1 cos
NOTE: cos sin
2
2
2
1 2 max max
1 sin
Mechanics of Solids
Chapter 3
15/26
For small strains:
2
max
2 max
Therefore:
and
sin γ = γ
1 2 max 1
max
By Hooke’s Law in shear:
2
____________________ ( 1 )
G
In last lecture it was shown that: max
FROM ( 1 ), ( c ), and ( d ):
max
E
E
G
________ ( c )
1 ______________ ( d )
2
1
G
2
2G1 E
G
E
__________________ ( 2 )
21
Mechanics of Solids
Chapter 3
16/26
3.7 TRANSMISSION OF POWER BY CIRCULAR SHAFTS
We know:
WORK = FORCE x DISTANCE
In rotation:
WORK = TORQUE x ANGLE ( where the angle is in radians )
W = T
POWER = time rate at which the work is done.
P
dW
dt
d
T
dt
dT
d
T
dt
dt
0
( T is constant )
d
dt
angular velocity
in { rad / sec } ____________________ ( 3 )
P = T
If is in Hz ( cycles / sec or revolutions per second), this is frequency, f.
rev 2 rad
sec rev
f
= 2 π f { to convert:
rev / sec to rad / sec }
sub into ( 3 ):
P = 2πfT
f in { rev / sec } _____________________ ( 3a )
If is in rpm {rev. per minute}, this is n
rev
min
n
2 n
60
2 rad 1 min
1 rev 60 sec
n
30
{ to convert: rpm to rad / sec }
sub into ( 3 ):
P
nT
30
n in { rpm } __________________________ ( 3b )
Mechanics of Solids
Chapter 3
17/26
U.S. uses horsepower, hp
MUST KNOW:
1 hp 550
ft lbs
sec
Converting Eqn ( 3b ) to units of horsepower yields:
n T 1 hp
H
ft lbs
30
550
sec
OR
H
nT
16,500
{ n = rpm, T = ft-lbs, H = hp } __________ ( 3c )
Mechanics of Solids
Chapter 3
18/26
EXAMPLE No. 1
GIVEN:
A solid steel shaft AB is used to transmit 5 hp from the motor M. The shaft rotates at =
175 rpm and the steel has an allowable shear stress of τallow = 14.5 ksi.
FIND:
The required diameter of the shaft to the nearest ⅛ inch.
A
SOLn:
M
B
Mechanics of Solids
Chapter 3
19/26
EXAMPLE No. 2
GIVEN:
A hollow propeller shaft of outside diameter 6.0 in is required to transmit 4000 hp while
rotating at 1500 rpm. The material is steel with shear modulus of elasticity G = 11.5 x
106 psi. The allowable stress in shear is 7500 psi and the allowable angle of twist per unit
length is 0.01 degrees per inch.
FIND:
a. The required inside diameter d of the propeller shaft.
b. Specify to the nearest ¼ in the actual inside diameter to be used.
SOLn:
Mechanics of Solids
Chapter 3
20/26
3.8 STATICALLY INDETERMINATE TORSIONAL MEMBERS
Statically Indeterminate means there are more unknowns that eqns of equilibrium to solve
for the unknowns.
General method to solve an indeterminate torsional structure is:
1. FBD & eqns of equilibrium
2. eqns of compatibility
(based on physical conditions pertaining to angles of twist)
3. torque – displacement relations
(relate angles of twist to torques: i.e., = TL / GIP)
4. Solve for torques from which and can be found
GIVEN:
Analysis Objectives:
1. Find TA and TB
2. Find τmax
3. Find c
Can use Flexibility Method or Stiffness Method…..Text goes through Flexibility Method,
so we’ll go through the Stiffness Method.
1. Equilibrium Eqn.
FBD:
TB
TA
T0
+ T = 0
-TA - TB + T0 = 0
T0 = TA + TB ____________ ( 1 )
A
C
B
Mechanics of Solids
Chapter 3
21/26
2. Compatibility Eqns.
Select c as the unknown.
If we forget about T0 and keep B fixed, TA will cause C to rotate by:
c
TA L A
G I P, A
TA
G I P, A
LA
C _________ ( 2a )
If we forget about T0 and keep A fixed, TB will cause C to rotate by:
c
TB L B
G I P, B
TB
G I P, B
LB
C _________ ( 2b )
Substituting from ( 2a ) & ( 2b ) into ( 1 ) :
T0
G I P, A
LA
c
G I P,B
LB
c
G I P , A LB G I P , B L A
T0
L A LB
c
c
L A LB T0
__________________ ( 2c )
G I P , A LB I P , B L A
Finding the Torques by substituting (2c) into (2a) & (2b) for :
TA
G I P, A
L A LB T0
L A G I P , A LB I P , B L A
TB
G I P, B
L A LB T0
LB G I P , A LB I P , B L A
TA
T0 I P , A LB
I P , A LB I P , B L A
TB
_____ ( 3a )
T0 I P , B L A
I P , A LB I P , B L A
_____ ( 3b )
Finding Max Shear Stresses:
REF:
AC
TA d A
2 I P, A
CB
TB d B
2 I P,B
Angles of twist also, can now be found from eqns ( 2a ) & ( 2b ).
Tr
d
; r
Ip
2
need
these
for
HW
Mechanics of Solids
Chapter 3
22/26
B
COMPOSITE BARS
If A and B are different materials,
the bar is statically indeterminate.
A
GA, GB = Shear Modulus of Elasticity
dA
dA, dB = Diameters
dB
IpA, IpB = Polar moment of Inertia
T = Total Torque to which the composite bar is subjected.
Stiffness Method:
is unknown. The angle of twist is the same for both parts because they are bonded
together.
TA L
G A I pA
TA
G A I pA
TB L
G B I pB
TB
G B I pB
L
L
___________ ( 1a )
___________ ( 1b )
FBD
TB
T
TA
+ T = 0
TA + TB – T = 0
TA + TB = T ____________ ( 2 )
from ( 1a ) & ( 1b ) into ( 2 ):
G A I pA GB I pB
T
L
L
TL
____________ ( 3 )
G A I pA GB I pB
Mechanics of Solids
Chapter 3
23/26
Solve for the torques by sub eqn ( 3 ) into ( 1a ) & ( 1b ):
TA
G A I pA
TL
L G A I pA G B I pB
TB
TA
G B I pB
TL
L G A I pA G B I pB
T G A I pA
TB
G A I pA G B I pB
T G B I pB
G A I pA G B I pB
Maximum Shear Stress
A
TA d A
2 I pA
The Ratio of Shear Stresses
B
B GB d B
=
A GAd A
TB d B
2 I pB
TUBE
CORE
can be less than 1.0 which means that the stress in the core is larger than the stress in the
tube. (a = core, b = tube).
In order for this to be the case ( since: dA < dB ) you would have to have:
GA >> GB
NOTE:
The shear stress at the inner surface of the tube ( B ) is NOT necessarily the same as the
shear stress at the outer surface of the core ( A ). However, the shear strains in the 2 parts
must be the same at a common boundary if they are affixed / bonded together.
B
A
dA
dB
Mechanics of Solids
Chapter 3
24/26
3.9 STRAIN ENERGY in PURE SHEAR and TORSION
OMIT
READ: pg 226 - 233
Strain Energy of a circular bar in pure torsion:
T 2L
U
2GI p
U
GI p 2
2L
NOTE: U
EA 2
similarity
2L
P2L
2 EA
Strain Energy density:
2
2G
G 2
2
NOTE:
2
2E
E 2
2
Nonuniform Torsion:
U
L
0
T ( x)2
2GI p ( x)
dx
NOTE: U
L
0
P( x)2 dx
2 EA( x)
Mechanics of Solids
Chapter 3
25/26
EXAMPLE No. 1
GIVEN:
The circular shaft AC shown below is fixed to rigid walls at A and C. The solid section
AB is made of annealed bronze and the hollow section BC is made of aluminum alloy
2024-T4. A torque T = 30 kN m is applied to the shaft. GAB = 45 GPa, GBC = 28 GPa
FIND:
τmax in both the bronze and aluminum
SOLn:
Mechanics of Solids
Chapter 3
26/26
EXAMPLE No. 2
GIVEN:
A solid circular bar of copper ( G = 6 x 106 psi ) with length L = 4 ft and diameter d = 1.5
inches is subjected to pure torsion bt torques T.
CALCULATE:
The strain energy U stored in the bar when the maximum shear stress is 4000 psi.
SOLn: