Document
advertisement

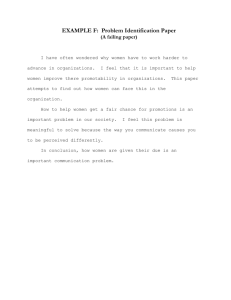
Characteristics of transfer functions 2. Characteristics of transfer functions 2.1 Modeling of Dynamic systems Modeling of dynamic systems is concerned with cause and effect relationship between inputs (X) and outputs (Y). The simplest model has only one input and output (SISO = Single input, Single Output). The input and the output are variables of real process with physical dimension. In the actual application the input and output are assigned to a limited area (Xmin, Xmax and Ymin, Ymax). The following expressions show how you can involve the model equations dimensionless: X ( t ) d i m X d i m [ ] [ ] m i n X ( t ) = × 1 0 0 <2.1.a.> Xd i m Xd i m []m [] m a x i n Y ( t ) d i m Y d i m [] [] m i n Y ( t ) = × 1 0 0 <2.1.b.> Y d i m Y d i m [] [] m a x m i n Using dimensionless variables the model equations will involve time as a variable, primarily in the form of derivatives. There are a lot of methods to involve these differential equations if the process can be modeled as a LTI (Linear Time Invariant) system. Note: The system is linear if the superposition is available. The superposition means if you energized the system an arbitrary input signal X1 and the response output signal is Y1 after energized the system an other arbitrary input signal X2 and the response output signal is Y2 than energized the system X1+X2 signal the response will be Y1+Y2. The Laplace transform of a function of time, f(t), is written as the ¥ t () s=òf( te )-s d tand the initial conditions are zero: integral F 0 df() t =sFs () <2.2.> dt The Laplace transform converts the system from time domain to sdomain. The s-domain implicit contains the frequency domain. The Laplace transform is a linear transformation consequently z ( t ) =× a x ( t ) + axt × ()than Z ( s ) =× a X ( s ) +× a X ( s ) . 11 2 2 1 1 2 2 Characteristics of transfer functions Supposing that the process operates in steady-state at the working point one (X1, Y1) when the input signal start to change (X1+x(t)). The output response is (Y1+y(t)). You see on the Fig. 2.1, the initial conditions of x(t) and y(t) signals are zero, and if the x(t) and y(t) signals are sufficiently small than the process can be modeled as an LTI system. Final the process will operate in steady-state at the working point two (X2, Y2). Y y(t) WP2 WP1 t X x(t) t Figure 2.1. Steady-State characteristics and dynamic response Hereinafter we will examine only LTI system. The dynamic behavior of LTI system can be written linear time invariant differential equitation. n n 1 d y ( t ) d y ( t ) d y ( t ) a + a + L + a + a y ( t ) = n n 1 1 0 d t d t d t <2.3.a.> m m 1 d x ( t ) d x ( t ) d x ( t ) = b + b + L + b + b x ( t ) m m 1 1 0 d t d t d t Note: The system is proper if n ³ m and strictly proper if n > m . The Laplace transform is: n n 1 a s Y ( s ) + a s Y ( s ) + L + a s Y ( s ) + a Y ( s ) = n n 1 1 0 <2.3.b.> m m 1 = b s X ( s ) + b s X ( s ) + L + b s X ( s ) + b X ( s ) m m 1 1 0 Arranged this equation: m m 1 b sb + s + L + b s + b Y ( s ) m m 1 10 = G ( s ) = n n 1 X ( s ) a s + a s+ L + a s + a n n 1 10 <2.4.a.> Characteristics of transfer functions The G(s) is called transfer function. The other form of the transfer function is the so called zero-pole form. Arranged the 2.4.a: bsz (+ ) L ( sz + ) m 1 m G ( s ) = <2.4.b.> a ( sp + ) L ( sp + ) n 1 n bm where zj are the zeros and pi are the poles, and the gain is signed Kzp = a . n The Bode form of the transfer function is generated from the zero-pole form. Arranged the 2.4.b if all roots are real numbers: 1 1 ( 1 + s) L ( 1 + s ) bzz × × L z z z 1 m G ( s ) =m12 m <2.4.c.> 1 1 ap × × p L p n 1 2 n ( 1 + s) L ( 1 + s ) p p 1 n 1 1 where - z = t j and - p = Ti are the time constants of the transfer function. j i If there is a complex conjugate pair of roots than first they are multiplied and after arranged it, for example: 1 1 1 12 1 1 ( 1) + s( 1 + s ) = 1 + s (+ ) + s× <2.4.d> p p p p 1 p 2 1 2 p 1 2 where 1 1 × =T is the time constants of the transfer function and p1 p1 1 1 + =2 ×× D Twhere D is named damping ratio. If D < 1 than there is a p 1 p 2 complex conjugate pair of roots, else the roots are real numbers. If you define this transfer function in MATLAB you should give a concrete value the polynomial coefficients of numerator and denominator. For example: 2 s + 4 . 1 G ( s ) = 2 1 <2.5.> 3 . 5 s+ 1 . 7 s + 2 . 3 The syntax of the tf command the next: tf([num],[den]) where num is the polynomial coefficient in descending order in degree of numerator and den is the polynomial coefficient in descending order in degree of denominator. Characteristics of transfer functions The square brackets aren’t required if the polynomial’s order is zero, otherworld it is a constant. Type the expression 2.5 into a MATLAB’s M-file: G1=tf([2 4.1],[3.5 1.7 2.3]) Use the Save File and Run item of Debug menu! On the Command window the following answer appears. Transfer function 2s+4.1 --------------3.5s^2+1.7s+2.3 You define the zero-pole form of a transfer function in MATLAB. Of course you must give a concrete value the roots! The syntax of the zpk command the next: zpk([zeros of num],[poles of den],gain) If you have the G1 variable in transfer function form and you want to use the pole-zero form of this transfer function it is easy to convert it. If the G1 variable is being it is enough to type the next: G1=zpk(G1) Use the Save File and Run item of Debug menu! Zero/pole/gain 0.57143(s+2.05) -------------------(s^2+0.7857s+0.6571) Of course if the G1 variable is being in zero-pole form you can convert it using the G1=tf(G1) command. Note: Unfortunately there isn’t command to define a transfer function in Bode form. The syntax of the all commands whose operand has transfer function type (impulse, step, bode, nyquist, and so on) are the following: command(name of transfer function). For example step(G1) which figures the unit step response of the G1(s) transfer function. It is possible to see more transfer function together typing step(G1,G2). Characteristics of transfer functions 2.2 Block diagram representation The basic block diagram element, called block, is a box with one input and one output (Fig. 2.2.a.). The direction of flow from input to output is indicated by arrows. This box contains the transfer functions, G(s), expressing the dynamical relationship between its input and output. Note: Sometimes we use the block to represent the steady-state relationship or the non-linear behavior. When a signal goes two destinations you can use the takeoff point as shown in Fig. 2.2.b. The summing junction is used to represent the addition or subtraction of signals as shown in Fig. 2.2.c. These three graphical objects are enough to represent more complex linear system. The arrows show the direction of the signal flow. a. b. c. y(s) y(s) x(s) x(s) y(s) x(s) x(s) ± y(s) G(s) y(s) ± Figure 2.2. Graphical elements of block diagram The great advantages of the block diagram representation are that they clearly show the cause and the effect relationship of system components and how the elements of the system are interconnected. The advantages of the s-domain is to give simply method to deduce the transfer function of a complicated time-domain linear system. The s-domain functions are known as block’s transfer functions. Blocks in cascade Resulting transfer function is given by multiplying the two transfer function of the blocks. z(s) x(s) G1(s) y(s) G2(s) y ( s ) = G ( s ) = G ( s ) × G ( s ) 1 2 x ( s ) Figure 2.3. Block in cascade Characteristics of transfer functions Blocks in parallel Resulting transfer function is given by adding the two transfer function of the blocks. x(s) y(s) G1(s) ± y ( s ) = G ( s ) = G ( s ) ± G ( s ) 1 2 x ( s ) G2(s) Figure 2.4. Block in parallel Blocks in feedback Numerator of the resulting transfer function equals to the block in the forward branch, and the denominator is given one and plus-minus the blocks in the loop in cascade. x(s) y(s) G1(s) G ( s ) y ( s ) 1 = G ( s ) = x ( s ) 1 ± G ( s ) × G ( s ) 1 2 G2(s) Figure 2.5. Block in parallel In generally if the feedback is negative the denominator of resulting transfer function contains the plus sign. 2.3 Basic transfer functions The nature of a transfer function can be proportional, integral, or differential. The speed of response of the system depends on its time constants. Some transfer functions have special nature, when the response of the block repeats the input signal with delayed it in time. It is called delay time, transport time, or dead time. The most complicated transfer function of a linear system can be built only six basic transfer functions connected them cascade, parallel, and feedback. These are the proportional tag signed by P, the integral tag signed by Characteristics of transfer functions I, the differential tag signed by D, the dead time tag signed by H, accordingly a first order tag signed PT1 and the second order tag signed PT2. We will define the transfer functions and differential equations, and plot and analyze the unit step responses and bode diagrams of these basic tags. P proportional tag The nature of the proportional tag is that the output repeats the shape of the input signal, only gains it. The sign of the gain is K. ()=Kxt ×() The differential equitation: yt GP(s)= K The transfer function If you want to define this transfer function in MATLAB you must give a concrete value of the gain K. The name of the proportional tag transfer function is GP ( s ) . For example let be K = 2.4 and the name is GP. Type it an M-file: K=2.4; GP=tf(K,1) Use the Save File and Run item of Debug menu! Two variables (K, GP) come into being in the Workspace and the result of the command lines is highlight on the Command window: Transfer function 2.4 Figure 2.6. Unit step response of proportional tag Characteristics of transfer functions If the GP transfer function type variable is available in the Workspace you can create the figure of impulse or step response in time-domain of the proportional tag, typing the impulse or step command. step(GP) The response signal is on the Fig. 2.6. With the Data Cursor you can see the value of the gain. The Bode or the Nyquist diagram of a transfer function can be drawn by typing the bode or nyquist command. bode(GP) Figure 2.7. Bode diagram of proportional tag You can read the gain’s value on the Fig. 2.7 in decibel. Typing the 7.6 10 20 expression on the Command window you will receive 2.988 as the gain’s value for result which is 2.4 for the engineers. Note: MATLAB automatically offers an area of time or frequency for the figures. You can change it. For example: t=0:0.05:2.5; step(GP,t) Characteristics of transfer functions I integral tag The nature of the integral tag is that the output increases or decreases while the input signal isn’t zero. The KI integral coefficient or TI integral time constant describes the speed of the changes in the output. yt () () t =K () td t or T =xt () òx The differential equitation: y I× I× dt K 1 I Gs I()= = The transfer function s s T I When you define this transfer function in MATLAB you must give a concrete value of the integral coefficient KI or integral time constant TI, and a name of the integral tag’s transfer function GI ( s ) . For example be the value of [ec.]and the name is GI! Type it an M-file: the integral time constant TI=2.4s TI=2.4; GI=tf(1,[TI 0]) Use the Save File and Run item of Debug menu! Two variables (TI, GI) come into being in the Workspace and the result of the command lines is highlight on the Command window: Transfer function 1 ---2.4s Type the step(GI) command to see the unit step response (Fig. 2.8). On the Fig. 2.8 we show how you can count the value of TI from arbitrary two 1 point of line. Counting of KI is similar, because of next expression: KI = T . I Type the bode(GI) command to see the Bode diagram (Fig. 2.9)! On the Fig. 2.9 you can see the dialog box shown by right mouse click, the items of Characteristic and Minimum Stability Margins are chosen. The gain and phase crossover frequencies are highlighted after using these items. (The Fig 2.9 only has gain crossover frequency) The phase margin belongs to the gain crossover frequency and indicated on the Bode phase diagram. After left mouse click on the point a dialog box appears with detailed information. The value of the gain crossover frequency in rad./sec. is equal the value KI in 1/sec. Characteristics of transfer functions Figure 2.8. Unit step response of integral tag Figure 2.9. Bode diagram of integral tag Characteristics of transfer functions D differential tag The nature of the differential tag is that the output is zero while the input signal is a constant. The KD differential coefficient or TD differential time constant describes the gain of the speed of the changes in the input. d x ( t ) d x ( t ) ( t ) = K × =× T The differential equitation: y D D d t d t G () s= Ks × = s T The transfer function D D D Figure 2.10. Bode diagram of differential tag When you define this transfer function in MATLAB you must give a concrete value of the differential coefficient KD or differential time constant TD, and a name of the differential tag’s transfer function GD ( s ) . For example D=0.4s [ec.]and the name is GD! be the value of the integral time constant T Type it an M-file: TD=0.4; GD=tf([TD 0],1) Use the Save File and Run item of Debug menu! Two variables (TD, GD) come into being in the Workspace and the result of the command lines is highlighted on the Command window: Characteristics of transfer functions Transfer function 0.4s If we type the step(GI) command the MATLAB sends an error messages on The Command window. It isn’t able to plot the theoretic Direct delta δ(t) signal. Type the bode(GD) command to see the Bode diagram! The reciprocal value of the gain crossover frequency in rad./sec. equals the differential time constant value in sec. shown it on the Figure 2.10. H dead time tag The nature of the dead time tag is that the output repeats the shape of the input signal, only delays it. The sign of delay time is τ. ( t)= 1 ( t-t) ×x ( t t) The differential equitation: y - st G The transfer function H(s)=e When you define this transfer function in MATLAB you must give a concrete value of the delay time constant τ and a name of the dead time tag’s transfer function GH ( s ) . For example be the value of Tau= 0.1 and the name is GH. The transfer function of dead time is transcendent and so it needs a special tf command. Type the following an M-file: Tau=0.1; GH=tf(1,1,’inputdelay’,0.1) Use the Save File and Run item of Debug menu! Two variables (Tau, GH) come into being in the Workspace and the result of the command lines is highlight on the Command window: Transfer function Exp(-0.1*s)*(1) Note: Instead of 1,1 part of this tf command you can type arbitrary transfer function. Type the step(GH) command to see (Fig. 2.11) the unit step response. On the Fig. 2.11 we show how you can read the value of Tau. Note: We plot the Fig. 2.11 define the t=0:0.001:0.8 time variable and type the tf(GH,t) command. Type the bode(GI) command to see the Bode diagram (Fig. 2.12)! On the Fig. 2.12 we show how you can read the value of Tau. On the Fig. 2.12 you can see the very strong phase shift caused by the dead time. Characteristics of transfer functions Figure 2.11. Unit step response of dead time tag Figure 2.12. Unit step response of dead time tag Characteristics of transfer functions PT1 first order tag The nature of the first order tag is that the output increases with decreasing speed until the output reached the final value. The T time constant describe the required settling time. d y ( t) +y ( t)=x ( t) The differential equitation: T d t 1 G () s= P T 1 The transfer function sT+1 When you define this transfer function in MATLAB you must give a concrete value of the time constant T, and a name of the first order tag’s transfer function GPT1(s) . For example be the value of the time constant T= 4[sec.]and the name is GT1! Type it an M-file: T=4; GT1=tf(1,[T 1]) Use the Save File and Run item of Debug menu! Two variables (T, GT1) come into being in the Workspace and the result of the command lines is highlight on the Command window: Transfer function 1 ---4s+1 Type the step(GT1) command! On the Fig. 2.13 we show where you can read the value of T and one percent settling time Ts1%. Involving the differential equitation energized the PT1 tag by unit step t ( )=0.6321 t = T the value is yT ( x(t) = 1(t) ) the result is yt ()=1- e T. At T= ) 0 .9 8 1 7 and at t = 5×T the value and at t = 4 ×T the value is y(4 T= ) 0 .9 9 3 3. You can find the T time constant and the two percent is y(5 settling time Ts2% or the one percent settling time Ts1% on the curve of the step response of first order tag as shown on the Fig. 2.13. Type the bode(GT1) command! On the Fig. 2.14 you can read the T time constant in second as the reciprocal value of the frequency in rad./sec. at the -45º phase shift and also this frequency is called break-point frequency where the amplitude value is -3 dB. Characteristics of transfer functions Figure 2.13. Unit step response of first order tag Figure 2.14. Bode diagram of first order tag Characteristics of transfer functions PT2 second order tag The nature of the second order tag is that the oscillatory behavior of the output signal is possible. The T time constant the D damping ratio is required to define a second order tag. 2 d y ( t ) d y ( t ) T2 + 2 × D × T += y ( t )x ( t ) d t d t 1 G ( s ) =2 P T 2 The transfer function T s+ 2 D T s + 1 If you want to define this transfer function in MATLAB you must give a concrete value of the time constant T and D damping ratio, and a name of the first second tag’s transfer function GPT 2 (s) . At D ³ 1 condition the transfer function of PT2 tag is decomposed two PT1 tags in cascade, but if D < 1 this way is not possible. We will examine only the D < 1 condition with different D values. For example be the value of the time constant T= 2[sec.] and The differential equitation: D1 = 0.8 , D2 = 0.4 , D3 = 0.1, and the name is GT2! Type it an M-file: T=2; D1=0.8; D2=0.4; D3=0.1; GT2D1=tf(1,[T^2 2*D1*T 1]) GT2D2=tf(1,[T^2 2*D2*T 1]) GT2D3=tf(1,[T^2 2*D3*T 1]) Use the Save File and Run item of Debug menu! The new variables (T, D1, D2, D3, GT2D1, GT2D2, GT2D3) come into being in the Workspace and the result of the command lines is highlight on the Command window: Transfer function 1 -----------4s^2+3.2s+1 Transfer function 1 -----------4s^2+1.6s+1 Characteristics of transfer functions Transfer function 1 -----------4s^2+0.4s+1 Type the step(GT2D1,GT2D2,GT2D3) command! Use the Save File and Run item of Debug menu! Figure 2.15. Unit step response of second order tag with different D values You can see on Fig. 15 the smaller value of damping ratio causes higher amplitude of the oscillatory behavior. We can’t determine the value of T time constant and the D damping ratio. Type the bode(GT2D1,GT2D2,GT2D3) command! 1 The wT = is called natural frequency. The phase shift at the natural T frequency is -90º, accordingly you can count the T time constant finding the 90º phase shift on the Bode diagram of the second order tag. The Fig. 16 shows it to you. You can also see on Fig. 16 the smaller value of damping ratio causes higher peak value of the amplitude at the natural frequency and sharper transition on the phase diagram. Characteristics of transfer functions Figure 2.16. Bode diagram of second order tag with different D values 2.4 Basic transfer functions in cascade A lot of generally used transfer functions are composed from the basic transfer functions in cascade. For example: HPT1 dead time first order, IT1 integral first order, PT3 third order, and so on. The HPT1 and IT1 are very popular to substitute a real measured curve of a process. Substitution with HPT1 The all transfer function without integral effect, other word have final value can be substituted with HPT1, or HPT2, or PT3. The later two require computer. The transfer function of HPT1 is: 1 -s u G ( s ) = eT H T 1 <2.6.> s T + 1 g where Tg is the approximated time constant and Tu is the approximated delayed time. If we have a reaction curve of the process energized it by a unit step shape signal, the first fitting the line of maximum slope of the real curve. Characteristics of transfer functions Where this line crosses the beginning and the final value of the reaction curve provides the Tu and the Tu + Tg approximated time values. See Fig. 2.17! The ratio of the amplitude of reaction curve and input signal provides the gain of the approximated model of process. Figure 2.17. Approximated HPT1 model of a reaction curve 0 .8 3 =0 .8 3 As for the Fig. 2.17 the K= , T u=0.43sec., and P 1 Tg=2.73sec. and so the approximated transfer function: 0 . 8 3 -0 4 3 s Gs () = e. H T 1 . 2 . 7 31 s + Substitution with IT1 The all transfer function witches have integral effect, other word haven’t final value can be substituted with IT1, or HIT1, or IT2. The later two require computer. The transfer function of IT1 is: 1 1 G () s= I T 1 <2.7.> s T T + 1 Is g where Tg is the approximated time constant and TI is the integral time constant. Characteristics of transfer functions If we have a reaction curve of the process energized it by a unit step shape signal, the first is the extension of the linear section of the reaction curve. Figure 2.18. Approximated IT1 model of a reaction curve As for the Fig. 2.18 the TI = 2.5sec., and Tg = 4sec., and so the 1 1 () s= I T 1 approximated transfer function: G . 2 .54 ss + 1 2.5 Transfer functions in parallel The most wide-spread compensation is the PID. In the industrial area the P, I, and D effect are used in parallel three channels, and differential first order DT1 is used instead of pure D tag. Note: Often used solution is that P, I and D effects are generated in feedback. In the industrial area the ratio of the differential time TD constant and T T < D=A <2 0The AD is called differential gain. first order time constant is 5 D T There are differences between the American form and the European form of the PIDT1 compensator are shown in Fig. 2.19.a and 2.19.b. Characteristics of transfer functions KC KI + s K D ×s sT + 1 1 + + Figure 2.19.a. American form of PIDT1 1 sTI + + + KC TD ×s sT + 1 Figure 2.19.b. European form of PIDT1 The effect of the two type of the PIDT1 compensator is same, if: K K TI = C and TD = D <2.8.> KI KC Depending on the status of the switches of the channels there are P, I, PI, PDT1, and PIDT1 compensator. If the model of a process described by transfer function without integral effect then the PI, PIDT1, maybe P compensator are practicable. The type of the compensator depends on the ratio of the approximated time constant Tg and the approximated delayed time Tu. If the model of a process described by transfer function with integral effect than the P, PDT1 maybe PIDT1 compensator are practicable. Hereinafter we will use the European form of the PIDT1 compensator. PI compensator The most used compensator for plant without integral effect is the PI. The transfer function ì 1 ü 1 ï ï + s T ï I G ( s ) = K 1 +ï = K í ý <2.8.> P I C C ï ï T s T I I ï s ï î þ Defining this transfer function in MATLAB requires a concrete value of the integral time constant T=2.4 sec. and KC=2 gain. Kc=2; Gi=tf(1,[2.4 0]) Gpi=Kc*(1+Gi) The unit step response of the PI compensator is shown on the Fig. 2.20. Characteristics of transfer functions Figure 2.20. Unit step response of PI compensator Figure 2.21. Bode diagram of PI compensator Characteristics of transfer functions On the Fig. 2.20 you can read the KC = 2 at the beginning and the K é 1 ù T = C=2 .4 s e c .It is clear K 0 .8 3 2 I , and so from formula 2.8 the I= ê ú e c .û ës K I the unit step response of a pure proportional P (Fig. 2.6) and integral I (Fig 2.8) tag in parallel. On the Fig. 2.21 you can read the KC = 6dB, and at the phase shift -45 6 0 .4 1 7 r a d /s e c .. The gain degree the w . The value I= 2 0 K = 1 0 = 1 . 9 9 5 ;2 C 1 [1/sec.], and so TI =2.4sec. rad/sec.]equals the value of of w I[ TI PDT1 compensator In the industrial area the most used compensator for plant with integral effect is the P, but in the circuit technique The PDT1 compensator is often applied. The DT1 is a pure differential D and first order T1 tag in cascade, and the PDT1 is a proportional P and DT1 tag in parallel. The transfer functions of PDT1 compensator: ì ü s T 1 + s ( T + T ) ï ï D G ( s ) =+ K 1D = K í ý <2.9.> P D T 1 C C ïs ï T + 1 s T + 1 ï ï î þ Defining this transfer function in MATLAB requires a concrete value of the KC=2 gain and the differential time constant TD=0.9 sec. and the differential gain AD=9, and so the time constant of the first order part of DT1 is T=0.1 sec. Kc=2; Gdt=tf([0.9 0],[0.1 0]) Gpdt=Kc*(1+Gdt) The Fig. 2.22. shows the unit step response of the PDT1 compensator. .05»2at the final value, the peak On the Fig 2.22 you can read the K C=2 value Apeak = 20 of the amplitude at the beginning, and the time constant T= 0.1sec. of the first order tag where the initial tangent line intersects the final value. From the Laplace final value theorem: T + T D l i m G ( sK ) = = A <2.10.> P D T 1 C p e a k T s ® ¥ From the formula 2.10: Characteristics of transfer functions AK -C 2 0 2 p e a k T = T = 0 . 1 = 0 . 9 s e c . D K 2 C <2.11.> Figure 2.22. Unit step response of PDT1 compensator The Fig. 2.23. shows the Bode diagram of the PDT1 compensator. On the Fig 2.23 you can read the KC » 6dB at the beginning of the amplitude 3 .2 r a d /s e c . at the peak value of the p e a k= curve and the frequency value w positive phase shift. Convert the gain to real number KC = 2 . w × w We know that w T= A D× D, and so p e a k= w D T and the w wD= wpeak AD × w and w T= A D p e a k <2.12.> Using the formula 2.12, assuming the differential gain AD = 9 w . 2 1 1 p e a k3 w = == 1 . 0 7/ r a d s e c T = = = 0 . 9 3 s e c .and D D , and so w . 0 7 A D1 D3 1 w = A ×= w × 3 . 2 = 9 . 6 r a d / s e c . =0 .1 s e c . , and so T= T D p e a k3 D 9 .6 Characteristics of transfer functions Figure 2.23. Bode diagram of PDT1 compensator 2.6 Transfer functions in feedback Sometimes you put the compensator in the feedback branch or create a compensator with feedback of transfer function. For example: - G1 ( s ) 2.5 s G1( s) 1.5 Figure 2.24. Eliminate the integral effect of an actuator with proportional feedback The transfer function: 2 . 5 G ( s ) 2 . 5 G ( s ) = 1 = s = 2 . 5 1 + G ( s ) G ( s )1 + 3 . 7 5 1 2 +× 1 . 5s s The G(s) is a first order tag. <2.13.> Characteristics of transfer functions Note: In the industrial area it is used positioning an actuator or in the two or three point controller. 2.7 Exercises 1. 3 .5 ()= 1 Define the time constant and the gain of the Gs s+1 .7 5transfer function from the step response and from the Bode diagram! Save the figures with comments! 2. Define the transfer functions in cascade resulting from the following figure, and indicate where to read the time constant and the integral time constant on the figure of the unit step response and on the figure of Bode diagram! G21 ( s ) 2.5 s G22 ( s ) 1 8s 1 3. Define the transfer functions in parallel resulting from the following figure, and indicate where to read the necessary values to define the gain, the differential time constant and the first order time constant on the figure of the unit step response and on the figure of Bode diagram! G31 ( s) 2.5 G32 ( s ) 2.7 s 0.3s 1 4. Define the transfer functions in feedback resulting from the following figure, and indicate where to read the necessary values! G1 ( s) 5 G1 ( s ) 1 2s 1