Technical Paper - EDGE - Rochester Institute of Technology
advertisement

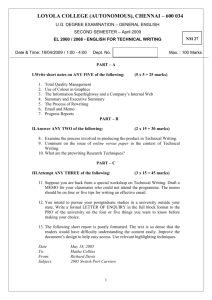
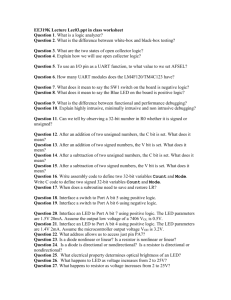
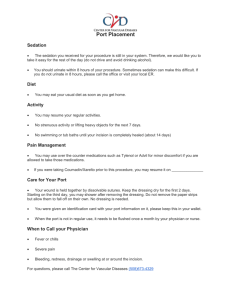
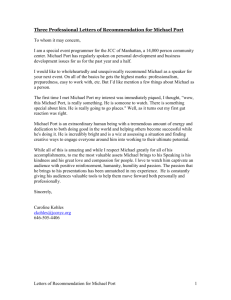
Multidisciplinary Senior Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 Project Number: P13022 BREAKAWAY PORT FOR THE REDUCTION OF TRAUMA IN VENTRICULAR ASSIST DEVICE DRIVELINES Nicholas Dominesey Mechanical Engineering Matthew Myers Industrial & Systems Engineering Michael Edson Electrical Engineering Jason Inman Electrical Engineering Elizabeth Sanford Mechanical Engineering Christopher Smith Mechanical Engineering ABSTRACT A breakaway port was designed and created to reduce trauma and infection in ventricular assist device (VAD) patients. The driveline is the cable that connects the internal pump to the external controller and battery supply, and often becomes infected due to traumatic forces. A breakaway port for a left ventricular assist device (LVAD) driveline does not currently exist on the market. The port has been designed to disconnect when a certain force is applied. This disconnect will activate an internal control system that will keep the pump running with a small internal battery supply until the driveline is reattached. Preliminary tests show that the force needed to disconnect the breakaway port is 3 N, and the internal system runs for over 45 minutes, which are both within the customer needs. BACKGROUND Heart failure is a major problem in the medical community due to the lack of good treatment options such as heart transplants. In the United States, about 5.7 million people have heart failure, and it is a contributing cause to over 280,000 deaths per year. One treatment option is a VAD, which works in conjunction with a failing heart to pump blood throughout the body. This is considered a bridge-to-transplant implant that helps increase survival and quality of life until a transplant is available. Due to the low availability of hearts to transplant, many VAD users have the device for several years, leading to many complications. One of the major complications of the VAD is infection due to the transcutaneous (travels through the skin) power cable or driveline. This driveline site must be closely monitored and treated to keep the infection to a minimum; otherwise it can spread along the cable causing sepsis (severe inflammatory response). The driveline connects the pump (inside the body) to the motor controller, which is usually worn on the belt. The main contributing factor in driveline infection is traumatic forces on the cable that break the interface between the skin tissue and the velour coating of the driveline. This can happen easily because the cable length is short, approximately one foot outside of the body, which is not long enough to reach the floor if the motor controller and/or battery pack unit is dropped (see Figure 1). To reduce these traumatic forces at the driveline, a breakaway device is proposed to help minimize infection rates. A driveline port will be implemented at the transcutaneous site. This port connects to the motor controller unit and battery packs through a cable that attaches to the port during normal usage. When the tension in the cable reaches a certain limit to cause traumatic forces at the port, the cable will disconnect, preventing the transmission of the tension. This should theoretically reduce the rate of driveline infections, which will in turn save a lot of money due to faster recovery time after the surgery and less clinical monitoring. Since VAD patients have very weak hearts, a backup power source and motor controller unit will need to be implemented. These devices can be implanted along with the pump and allow for support until the cable can be reconnected. The backup support should last long enough for the patient to seek assistance if the main support fails. Copyright © 2013 Rochester Institute of Technology Proceedings of the Multidisciplinary Senior Design Conference Page 2 Figure 1 – Current Thoratec HeartMate II LVAD (image courtesy of thoratec.com) PROCESS Table 1 - Customer Needs: CN1 Reduce the magnitude of traumatic forces on the port connection that passes through the skin. CN2 Reduce inflammation and infection incidence at the interface between the skin and the foreign body. CN3 Assist device pump always has a direct connection to a power source and a motor controller signal (an internal battery and motor controller must be implemented). CN4 Port makes a reliable connection for the Motor Controller signal while connected and does not disrupt the signal. CN6 Driveline cable has degree of flexibility between the port connection and the motor connection to reduce fatigue failure (this is the segment of the driveline that is internal). CN7 Connecting the external driveline to the transcutaneous port is easy to make, especially for elderly patients. CN8 Backup power lasts long enough for the user to seek assistance. CN9 Internal motor controller and battery are small enough to be implanted along with the pump in one of the peritoneal cavities. CN11 Internal motor controller and battery need to be able to handle the environment of body: temperature (~100o). *Note: Customer Needs 5 and 10 were removed because this alpha prototype will not be implantable. Table 2 - Engineering Specifications Spec ID CN ID(s) Description S1 CN1,2,7 Force to disconnect S2 CN6 Spring constant of cable Marginal Value 3N -- Ideal Value 1N 750 N/m S3 CN8 Backup support time 15 minutes 30 minutes S4 CN3 Power transmitted 10 Watts 8 Watts S5 CN3,4,8 Recharge time 120 minutes 15 minutes S6 CN9 Volume of internal unit 500 cm3 100 cm3 S7 CN3 Battery Voltage 14 Volts (DC) 12 Volts (DC) S8 CN4 Backup power switchover time < 3 seconds < 1 seconds S10 CN11 Operating Heat Flux 40 mW/cm2 0 mW/cm2 *Note: Specifications 9 and 11 were removed because this alpha prototype will not be implantable. Project P13022 Proceedings of the Multidisciplinary Senior Design Conference Page 3 Assumptions Made 1. Device is an alpha prototype and therefore will not be fully implantable when complete. 2. Thoratec Heartmate II pump and external controller cannot be modified in any way. 3. Driveline may be modified, but must still connect to and control pump. Functional Decomposition Figure 2 - Functional Decomposition Diagram Concept Selections Figure 3 - Concept Generation and Selections Heat Analysis It is known that the body will adapt to some temperature range and that the heat flux into the body is a more important factor to monitor. Based on research, the heat flux should not exceed 80mW/cm2. This is the value before damage is done to the tissue. In order to ensure a factor of safety of 2, the team designed the device for a limit of 40 mW/cm2. It was assumed that the body was at steady state and that the device was only an additional heat source. Thus, the analysis doesn’t include the metabolic heat generation of the body nor does it include the perfusion rate or circulation of heat due to the blood. Copyright © 2013 Rochester Institute of Technology Proceedings of the Multidisciplinary Senior Design Conference Page 4 A simple one-dimensional energy balance analysis was conducted using a total temperature resistance relationship. This was used to find the temperature on the surface of the device for a range of heat generation, and the maximum heat generation allowed from this analysis appears to be about 0.6W. In order to verify this analysis, an equation for the temperature distribution was found. The results show that the device would safely be able to generate 2 W of heat energy while remaining at 26mW/cm2, well below the constraint. In general the temperature distribution solution seems to fit a model better than the previous solutions. The problem still remains that on the right side of the device, the initial temperature and heat generation of the human body are not accounted for. Also, this is not the worst case scenario because if the left side of the device were to be adiabatic, then the temperature would be unknown and thus, a solution could not be obtained. Finally, this model neglects the heat generation in the body but assumes that the body’s energy was used to bring the device temperature up to body temperature. It is assumed that the device reaches steady state body temperature and can then be neglected in the solution. Figure 4: Results of the ANSYS Analysis – Contour Plot of Heat Flux for 2 W of Heat Generation. 166.326 on the scale corresponds to 16.6mW/cm2, which is the maximum value and occurs at the corners of the device. In the body, the maximum heat flux that occurs naturally is about 11.2mW/cm2. The 2D analysis results show that a much smaller heat flux can be obtained for the same amounts of heat generation than from the 1D analysis. In the ANSYS analysis, the temperature appears to be relatively high. This is not likely to pose too much of an issue because of the assumptions made. In theory, this analysis seems quite simple but the body is truly difficult to model, so the result of this analysis is likely to have a large amount of error. From the ANSYS model, it can be concluded that the device is not likely to pose a threat to the body when generating up to 2W of heat energy. The factor of safety between the results and our limitations is about 4, which leaves an allowance of plenty more heat generation within the internal device. Force Pull Test A small experiment was conducted to determine the specification for the breakaway force. Skin in the abdomen area was pulled and measured with a force gauge. It was determined that at 1 N of force, the patient became a bit uncomfortable, and at 3 N the force was beginning to be painful. Based on multiple iterations of this test, our specification for breakaway force is ideally 1 N, with a marginal value of 3 N. Electrical Programming Internal microcontroller: The internal microcontroller’s primary purpose is to send a periodic signal to the motor controller in the event of a disconnect in order to run the pump. This is performed using the Timer A module available on the microcontroller. In this setup, Timer A is run in continuous mode and counts all the way to 0xFFFF. The register TACCR0 is used to determine the width of the actual pulse and the output is 3.3 V during the duration of 0 to Project P13022 Proceedings of the Multidisciplinary Senior Design Conference Page 5 TACCR0. From TACCR0 to 0xFFFF the pulse is 0. With this method, the correct duty cycle can be achieved needed by the motor controller. This microcontroller is also in charge of monitoring the internal battery during disconnect. This is done by monitoring the voltage of the battery using the analog to digital converter on the microcontroller. This information is then put in an ASCII string and sent wirelessly to the external microcontroller. The final function is to monitor the temperature of the circuit during the charge cycle, as this produces the most heat. This is performed using voltage division between a 10 kΩ resistor and a thermistor rated for 10 kΩ getting power from the 5 V regulator such that the output is nominally 2.5 V. This voltage fluctuates based on the resistance of the thermistor which changes with temperature. This voltage is also read using an analog to digital converter and compared to an equation to determine the temperature. External microcontroller: The primary purpose of the external microcontroller is to receive the battery voltage data using the UART and the receiver and use the voltage to determine an approximate lifetime remaining. The lifetime (in minutes) is then displayed on the two 7-segment displays for the user. When there are 30 minutes remaining, one beep from the alarm will occur. When there are 15 minutes, two beeps will be given. When the lifetime reaches zero, a solid beep is heard until reconnected. There is also a 15 minute safety factor built in, such that when the display says that there are zero minutes remaining there are actually 15 minutes of runtime left. This microcontroller also has access to a relay, which is used to toggle the alarm on and off as needed. Voltage Regulators: Four voltage regulator circuits are being used for this project. Two of these are the 3.3 V supplies for the microcontrollers on the internal and external boards. There is also a 5 V supply for the receiver circuit on the external board. These three regulators are all very similar Buck converters, and use the same external component (capacitors, inductors, and diodes) to ensure low ripple voltage and quick recovery times. The internal transmitter receives its 5 V power from the motor controller in order to save layout space. The other regulator is a 15 V boost circuit that converts the external battery power supply to 15 V for use in charging the battery. The external components were chosen through several calculations guided by the datasheet for the part (LM2577SX). Testing has shown that these regulators perform well under load conditions shown in the schematics. Battery Selection Batteries have been chosen for this project to minimize size and weight while also achieving the 30 minute runtime required by the specifications. Cost could also have an impact but was not important for the design. 4.32 Whr batteries were chosen for the prototype design and have an approximate volume of 100 cm3. If the total voltage is 12.8 V roughly and the current draw is 0.5 A, the power usage is 6.4 W, which gives a runtime of roughly 162 minutes. AA size batteries were chosen as the ideal size for the final design with a charge rating of 600mA*hr. Port Design and Selection Figure 5: Top 2 Port Designs (female sides pictured only) – Angled port (left) is rigidly connected to the body (flat plate sits flat on abdomen). Free port (right) has length of wire outside body, which would be taped to abdomen at a few locations (no flat plate was used in final build). Assumptions for both ports: Port is aligned vertically (points straight towards ground). Wire has some degree of stiffness (not completely flimsy). Subjects do not sleep on their stomachs. Angled Port: Pros: Port is easier to connect because of angle. Female end is less likely to catch on foreign objects. Port has greater comfort and is more compact because there is less material on the outside of body. Copyright © 2013 Rochester Institute of Technology Proceedings of the Multidisciplinary Senior Design Conference Page 6 Cons: Male end sticks out from body due to angle. Port may be harder to clean because the base is flat against body. When bending over, the port may cause large bending moments on the driveline and cause it to disconnect. Free Port: Pros: Port has some degree of motion and flexibility. Port is easier to connect because it is easy to see both ends of port. Port is easier to clean because no part is permanently attached to body. When bending over, port will move and cause smaller bending moments on port connection. Tape relieves pressure from transcutaneous site. Cons: Freedom of wire increases possibility of wire catching on objects. Port requires more maintenance because of the tape coming loose. Port might be less comfortable because of the material outside of the body. Tape may unexpectedly detach. Port Selection: The free port was chosen as the final design mainly because it would be easier to connect for the patient and because it would not cause any additional infection. It will also be more comfortable to wear for the patient. Geriatric Considerations Less than half of one percent of all LVAD users are below the age of 50, so some considerations of the elderly population must be accounted for in our design. Many of these patients suffer from some form of arthritis, which will impair their ability to grasp small objects or use a large amount of pinching force. Eyesight is also a concern, since one third of the population over 65 will lose some portion of their vision. Most commonly, blurred or distorted vision occurs, but sometimes blind spots can form in the eye, causing more vision loss. Lastly, hearing loss is a concern accounted for in our design. To account for the arthritis, the team designed a port that is easy to grasp and does not take much pinching force to disconnect. A bright stripe of color along the port and a bump on either side would help with poor eyesight, but these details did not make it into the final design. Finally, a vibrating motor was placed in the internal device to alert the user of the battery status when they are disconnected. This will address the hearing loss issue. RESULTS AND DISCUSSION Final Prototype Internal Device Construction Since the internal device will not be implanted, the case was made out of clear plastic because the material was readily available. The size of the internal electrical components was reduced greatly from the initial prototype to the final build. Figure 6: Internal Device CAD drawing External Device Construction An external device case was constructed to hold the external electrical components, switch and display (shown below). The case was made out of sheet metal into a triangular form to fit against the existing motor controller device. The edges were welded to create a very sturdy and durable case. Breakaway Port and Cable Construction The free port design was constructed from an existing breakaway port. The force to disconnect the port originally measured too high, so the port was machined to lower the contact friction until the 3 N force was obtained. Pins were inserted into existing holes in the port connection to connect the necessary wires across the port. 10-strand cable was obtained and utilized for the connections between internal and external devices. Project P13022 Proceedings of the Multidisciplinary Senior Design Conference Page 7 Figure 7: Device Final Build – Internal device and port connection (left) and external device (gray) attached to existing motor controller with port connection (right). Testing Table 3 - Testing Plan: Spec# Description Testing Plan Marginal Value Ideal Value Results S1 Force to disconnect S2 Spring constant of cable Backup support time S3 S4 Power transmitted S5 Recharge time S6 Volume of internal unit Battery voltage S7 S8 Backup power switchover time S10 Operating Heat Flux Use force gauge to pull breakaway cord and measure different speeds/methods of pulling off cable Measure deflection of cable 3N 1N 3N -- 750 N/m 25 N/m Unplug external system and keep track of how long internal system lasts Check to see if pump is running on back-up power and under normal conditions Let internal system run out of power, then plug back in and measure how long until fully charged Use calipers to measure dimensions 15 minutes 30 minutes 51 min* 10 Watts 8 Watts Acceptable 120 minutes 15 minutes 23 min* 500 cm3 100 cm3 370 cm3 Check voltage with a multimeter (see if it is 12.8 volts +/- 1.2) Check with a stop watch to time how long the pump is not running 14 Volts (DC) < 3 seconds 12 Volts (DC) < 1 seconds 14 Volts (DC) Not tested Place thermocouple on outside of internal unit, possibly while unit is inside simulated body tissue 40 mW/cm2 0 mW/cm2 46.2 mW/cm2 *Values were extrapolated from 18650 cell batteries to the AA size batteries chosen for the design. The 18650 batteries were used in the final design due to recharge board soldering issues. Internal Microcontroller: The internal controller at its present state has the ability to power the motor controller while running on the internal batteries. It sends out the required pulses to the motor controller to initiate and sustain the pump. Also, the vibration function was proven to work in testing. External Microcontroller: Currently, the external controller was shown to be able to display numbers from a table on the LED displays. An approximate battery lifetime data chart was placed in the code and the lifetime in minutes can be displayed to the user. Also, the relays trigger when the countdown reaches 0, which should alert the user that they are running out of time. Connection with P13021: An additional port was added to the internal case so that wireless energy transfer team could actually plug in there device to our circuit. Testing with their equipment was successful, and the internal components successfully powered the pump using this connection. Copyright © 2013 Rochester Institute of Technology Proceedings of the Multidisciplinary Senior Design Conference Page 8 PCB Design: The final PCB design is smaller compared to the prototype with the idea of creating a small implant. Enough parts were ordered to make two of each circuit board as a backup. External Device: The external device experienced noise on the input power line. This noise resulted in the regulators on the external board and the existing external controller malfunctioning. On the 3.3V regulator on the external board, 1.1V was seen when in system with the other components. However, when the board was directly connected to the power line, it performed as designed. CONCLUSIONS AND RECOMMENDATIONS Overall, the project was successful. As an alpha prototype, this device shows that the idea is achievable as a proof of concept. Although not all specifications were met, the device functions properly. Internal Microcontroller: The programming for temperature sensing and battery life determination was not completed due to time restraints and lack of programming knowledge. The circuitry is all present for the programming to work though. The temperature is read as a voltage division between a resistor and a thermistor. This feeds into an ADC that can be used in the program to stop charging or turn off the device. The same is done for the battery voltage. With more time, the UART would have been used on both of the microcontrollers to send and receive battery life data. The transmitter and receiver are in place on the boards and are located at the UART pins of the controllers. In theory, all that is required is the programming for the device to operate as desired. Batteries: AA size batteries for the internal device were not implemented in the final design due to an unexpected shortage of charging regulator boards. Instead, older batteries wrapped in electric tape were used as a quick fix. With more time, another charging board could be ordered and the smaller AA size batteries could be used as well as the cradle. Time testing would then need to be performed on these batteries to ensure they still meet the specs. It may also be possible to decrease the size of the implant by finding smaller batteries. External Electronics: More testing could be done with the alarm feature using the microcontroller and the programming for receiving the data was not completed. Once again, the UART should be usable for the programming. Increased capacitance on the input power line may fix the power issues exhibited by the external controller boards. Possibly the use of a wall-mounted recharging system for use on the internal implant could be implemented in order to separate the power demand on the power device as well as prolong external battery life. Based on the numbers found in testing, the external device battery life has been reduced by roughly 25%. TI Motor Controller: It is possible to reduce a large amount of internal circuitry by using the TI motor controller chip. This was attempted at the start of the quarter, but due to lack of programming knowledge was passed up for the microcontroller. If an EE or CE with good programming knowledge were to take part in the next iteration of the project, it is a strong recommendation that they attempt using this device. With it, the implant could become half of its current size. Internal Device Case: The device is larger than desired and retains some heat, but it is acceptable since it is the first prototype. External Device Case: The case was very sturdy, but ultimately it could have been more compact, less bulky, lighter, and the design could have been laid out in a way that utilized the space more efficiently. Breakaway Port: The breakaway port is bulky and heavier than originally intended, so a smaller waterproof port could have been purchased and utilized in the design. Color and raised surfaces could have been used for easier alignment, especially for geriatric patient consideration. If a wireless signal could have been obtained, only power would need to be sent through port, reducing wire size and possibly port size as well. Project P13022 Proceedings of the Multidisciplinary Senior Design Conference Page 9 REFERENCES [1] Bergman, T L, and Incropera, F P, 2011, "Example 1.6, Example 3.12," Fundamentals of Heat and Mass Transfer, pp. 26+. [2] Wolf, P D, 2008, "Thermal Consideration for the Design of an Implanted Cortical Brain-Machine Interface," U.S. National Library of Medicine. [3] Miller, L W, 2011, "Left Ventricular Assist Devices Are Underutilized," Circulation, pp.1552-558. [4] Roger, V L, 2011, “AHA Statistical Update,” Circulation, 125, pp. e2-e220. [5] Henriksen, K, 2009, “The Human Factors of Home Health Care: A Conceptual Model for Examining Safety and Quality Concerns,” J Patient Saf, 5 (4), pp. 229-236. [6] Quillen, D, 1999, “Common Causes of Vision Loss in Elderly Patients,” Am Fam Physician, 60 (1), pp. 99-108. [7] McNerney, M, "Human Factors Considerations in System Design for the Elderly," San Diego State University. [8] "Engineering ToolBox," http://www.engineeringtoolbox.com. [9] "Thoratec - Innovative Therapies for Advanced Heart Failure," http://www.thoratec.com. ACKNOWLEDGMENTS Rochester Institute of Technology Joseph Tartakoff, Graduate Consultant Dr. Steven Day, Faculty Customer Mr. Edward Hanzlik, Faculty Guide Dr. Todd Massey, M.D. Dr. Coley Duncan, M.D. Dana Shannon, NP Copyright © 2013 Rochester Institute of Technology