Uncertainty Analysis in Measurement & Instrumentation
advertisement

2141-375
Measurement and Instrumentation
Uncertainty Analysis
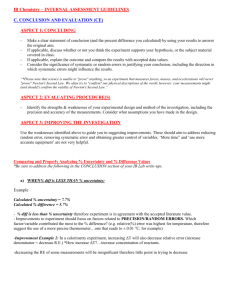
Measurement Error
True data
Measured value, x
x'
Bias error
x
Precision
error in xi
Measurement number
Uncertainty defines an interval about the measured value within
which we suspect the true value must fall
We call the process of identifying and quantifying errors as
uncertainty analysis.
Design-Stage Uncertainty Analysis
Design-stage uncertainty analysis refers to an initial analysis
performed prior to the measurement
Useful for selecting instruments, measurement techniques and
to estimate the minimum uncertainty that would result from the
measurement .
Design-Stage Uncertainty Analysis
u d = u02 + uc2 ( P %)
RSS method for combining error
Design-state uncertainty
ud = u02 + uc2
Interpolation error
u0
Instrument error
uc
Design-Stage Uncertainty Analysis
Zero-Order Uncertainty (Interpolation Error)
Even when all error are zero, the value of the measurand must be
affected by the ability to resolve the information provided by the
instrument. This is called zero-order uncertainty. At zero-order, we
assume that the variation expected in the measurand will be less than
that caused by the instrument resolution. And that all other aspects of
the measurement are perfectly controlled (ideal conditions)
y
u0 = ±1 / 2 resolution (95%)
yo
Instrument Uncertainty, uc
This information is available from the manufacturer’s
catalog
x
resolution
uncertainty
1/2 resolution
Design-Stage Uncertainty Analysis
Specifications: Typical Pressure Transducer
Operation
Input range
Excitation
Output range
Temperature range
Performance
Linearity error eL
Hysteresis error eh
Sensitivity error eS
Thermal sensitivity error eST
Thermal zero drift eZT
0-1000 cm H2O
±15 V dc
0-5 V
0-50oC nominal at 25oC
±0.5%FSO
Less than ±0.15%FSO
±0.25%of reading
0.02%/oC of reading from 25oC
0.02%/oC FSO from 25oC
The root of sum square approach:
erss = e12 + e22 + e32 + L en2
(95%)
Design-Stage Uncertainty Analysis
Example: Consider the force measuring instrument described by the catalog data that follows.
Provide an estimate of the uncertainty attributable to this instrument and the instrument design
state uncertainty.
Force measuring instrument
Resolution:
0.25 N
Range:
0 - 100 N
Linearity:
within 0.20 N over range
Repeatability:
within 0.30 N over range
Known: Instrument specifications
Assume: Values representation of instrument 95% probability
Solution:
Design-state uncertainty
ud = u + u
2
0
u0
½ Resolution = 0.125 N
2
c
u d = ± 0.1252 + 0.36 2 = ±0.38 N
uc
el2 + er2 = ± 0.2 2 + 0.32 = ±0.36 N
Design-Stage Uncertainty Analysis
Example: A voltmeter is to be used to measure the output from a pressure transducer that outputs
an electrical signal. The nominal pressure expected will be ~3 psi (3 lb/in2). Estimate the designstate uncertainty in this combination. The following information is available:
Voltmeter
Resolution:
Accuracy:
Transducer
Range:
Sensitivity:
Input power:
Output:
Linearity:
Repeatability:
Resolution:
10 µV
within 0.001% of reading
±5 psi
1 V/psi
10 Vdc ± 1%
±5 V
within 2.5 mV/psi over range
within 2 mV/psi over range
negligible
Known: Instrument specifications
Assume: Values representation of instrument 95% probability
Solution:
Design-Stage Uncertainty Analysis
Design-state uncertainty
ud =
(ud )2E + (ud )2P
Design-state uncertainty
Design-state uncertainty
(ud )E = (u )
(ud )P = (u0 )2P + (uc )2P
2
0 E
+ (u
)
2
c E
Error Propagation
Computation of the overall uncertainty for a measurement system consisting
of a chain of components or several instruments
Let R is a known function of the n independent variables xi1, xi2 , xi3, …, xiL
R = f ( x1 , x2 , K , xL )
L is the number of independent variables. Each variable contains some
uncertainty (ux1, ux2, ux3,…, uxL) that will affect the result R.
Application of Taylor’s expansion gives, (neglect the higher order term)
R ± ∆R = f ( x1 ± u x1 , x2 ± u x 2 ,..., xL ± u xL ) ≈ f ( x1 , x2 ,..., xL ) +
∂f
∂f
∂f
u x1 +
u x 2 + ... +
u xL
∂x1
∂x2
∂xL
The best estimate value, R’
R' = R ± u R ( P%)
Where R = f ( x1 , x2 ,..., xL )
Error Propagation
The combination of uncertainty of all variables (probable estimate of uR)
2
2
∂f
∂f
∂f
u R = ±
u x1 +
u x 2 + K +
u xL
∂x1 ∂x2
∂xL
=±
2
L
2
(
)
θ
u
∑ i xi
( P %)
i =1
Where θi is the sensitivity index relate to the uncertainty of xi
θi =
∂f
∂xi
Error Propagation
Example: For a displacement transducer having a calibration curve y = KE, estimate the
uncertainty in displacement y for E = 5.00 V, if K = 10.10 mm/V with uk = ±0.10 mm/V and uE =
±0.01 V at 95% confidence
Known: y = KE
E = 5.00 V
K = 10.10 mm/V
uE = 0.01 V
uk = 0.10 mm/V
Solution: Find uy
y ' = y ± u y = KE ± u y
u y = ± (θ E u E ) + (θ K u K )
2
θE =
∂y
=K
∂E
uE = 0.01 V
uy = ±
2
θK =
∂y
=E
∂K
uK = 0.10 mm/V
(Ku E )2 + (Eu K )2
= ± (10.10 mm/V × 0.01 V ) + (5 V × 0.10 mm/V ) = ±0.51 mm
2
2
Sequential Perturbation
A numerical approach can also be used to estimated the propagation of
uncertainty. This refers to as sequential perturbation. This method is
straightforward and uses the finite difference to approximate the
derivatives (sensitivity index)
1) Calculate the average result from the independent variables
R = f ( x1 , x2 ,..., xL )
2) Increase the independent variables by their respect uncertainties
and recalculate the result based on each of these new values. Call
these values Ri+
R1+ = f ( x1 + u1 , x2 ,..., xL ),
R2+ = f ( x1 , x2 + u 2 ,..., xL )
RL+ = f ( x1 , x2 ,..., xL + u L )
3) Decrease the independent variables by their respect uncertainties
and recalculate the result based on each of these new values. Call
these values Ri−
Sequential Perturbation
R1− = f ( x1 − u1 , x2 ,..., xL ),
R2− = f ( x1 , x2 − u2 ,..., xL )
RL− = f ( x1 , x2 ,..., xL − u L )
4) Calculate the difference for each element
δRi+ = Ri+ − R
δRi− = Ri− − R
5) Finally, evaluate the approximation of the uncertainty contribution from
each variables
δRi =
δRi+ + δRi−
2
≈ θ i ui
The uncertainty in the result
2
u R = ± ∑ (δRi )
i =1
L
1/ 2
Error Propagation
Example: For a displacement transducer having a calibration curve y = KE, estimate the
uncertainty in displacement y for E = 5.00 V, if K = 10.10 mm/V with uk = ±0.10 mm/V and uE =
±0.01 V at 95% confidence
Known: y = KE
E = 5.00 V
K = 10.10 mm/V
uE = 0.01 V
uk = 0.10 mm/V
Solution: Find uy
y ' = y ± u y = KE ± u y
u y = ± (δRE ) + (δRK )
2
2
y = KE = (10.10 )(5) = 50.50 mm
i
1
2
ui
x i +u i
x i -u i
Ri+
Ri-
δRi+
δRi-
δRi
5
0.01
5.01
4.99
50.60
50.40
0.10
-0.10
0.10
10.1
0.1
10.20
10.00
51.00
50.00
0.50
-0.50
0.50
xi
E
K
Error Sources
Steps in measurement process
1) Calibration
2) Data-acquisition
3) Data-reduction (Analysis)
Calibration
error
e11, e12, K
Data-acquisition
error
e21, e22, K
Data-reduction
error
e31, e32, K
eij
j = Elemental error
i = Error source group
i = 1 for Calibration Error
i = 2 for Data-acquisition Error
i = 3 for Data-reduction Error
Calibration Error Source Group
Element (j)
1
2
3
4
5
Etc.
Error Source
Primary to interlab standard
Interlab to transfer standard
Transfer to lab standard
Lab standard to measurement system
Calibration technique
Data-Acquisition Error Source Group
Element (j)
1
2
3
4
5
6
7
8
9
Etc.
Error Source
Measurement system operating conditions
Sensor-transducer stage (instrument error)
Signal conditioning stage (instrument error)
Output stage (instrument error)
Process operating conditions
Process installation effects
Environmental effects
Spatial variation error
Temporal variation error
Data-Reduction Error Source Group
Element (j)
1
2
Etc.
Error Source
Calibration curve fit
Truncation error
Multiple-Measurement Uncertainty Analysis
This section develops a method for the estimate of the uncertainty in the
value assigned to a measured variable based on repeated measurements
The procedure for a multiple-measurement uncertainty analysis
e1j=P1j+B1j
e2j=P2j+B2j
e3j=P3j+B3j
Calibrate
e11, e12 ,...
Data acquisition
e21, e22 ,...
Data reduction
e31, e32 ,...
Identify the elemental errors in each of the three source groups
(calibration, data acquisition, and data reduction)
Estimate the magnitude of bias and precision error in each of the
elemental errors
Estimate any propagation of uncertainty through to the result
Multiple-Measurement Uncertainty Analysis
Consider the measurement of variable, x which is subject to elemental
precision errors, Pij and bias, Bij in each of three source groups. Let i = 1, 2,
3 refer to the error source groups ( calibration error i = 1, data acquisition
error i = 2, data-reduction i = 3) and j = 1,2,…,K refer to each of up to any K
error elements of error eij
Source Precision index Pi
[
Pi = Pi12 + Pi 22 + ... + Pik2
Measurement Precision index P
[
P = P12 + P22 + P32
Source Bias limit Bi
]
1/ 2
]
1/ 2
[
Bi = Bi21 + Bi22 + ... + Bik2
Measurement Bias limit B
[
B = B12 + B22 + B32
i = 1, 2, 3
]
1/ 2
]
1/ 2
i = 1, 2, 3
Multiple-Measurement Uncertainty Analysis
The measurement uncertainty in x, ux
u x = B 2 + (tv ,95 P )
2
(95%)
The degrees of freedom, v (Welch-Satterthwaite formula)
2
3 K 2
∑∑ Pij
i =1 j =1
v= 3 K
∑∑ Pij4 / vij
(
i =1 j =1
)
Multiple-Measurement Uncertainty Analysis
Measurement uncertainty, ux
[
u x = B 2 + (tv ,95 P )
]
2 1/ 2
Measurement precision index, P
[
(95%)
Measurement bias limit, B
]
[
2 1/ 2
3
P = P12 + P22 + P
B = B12 + B22 + B32
Source precision index, Pi
[
1/ 2
Source bias limit, Bi
]
[
2 1/ 2
ik
Pi = Pi12 + Pi 22 + ... + P
]
Bi = Bi21 + Bi22 + ... + Bik2
eij=Pij+Bij
Identify elemtal errors
in measurement, eij
Measurand, x
]
1/ 2
Multiple-Measurement Uncertainty Analysis
Example: After an experiment to measure stress in a load beam, an uncertainty analysis reveals
the following source errors in stress measurement whose magnitude were computed from
elemental errors
B1 = 1.0 N/cm2
B2 = 2.1 N/cm2
B3 = 0 N/cm2
P1 = 4.6 N/cm2
P2 = 10.3 N/cm2
P3 = 1.2 N/cm2
v1 = 14
v2 = 37
v3 = 8
If the mean value of the stress in the measurement is 223.4 N/cm2, determine the best estimate of
the stress
Known: Experimental error source indices
Assume: All elemental error have been included
Solution: Find uσ
Measurement uncertainty, ux
[
u x = B 2 + (tv ,95 P )
Measurement precision index, P
[
]
2 1/ 2
3
P = P12 + P22 + P
]
2 1/ 2
(95%)
Measurement bias limit, B
[
B = B12 + B22 + B32
]
1/ 2
Propagation Uncertainty Analysis to a result
Consider the result, R which is determined from the function of the n independent
variables xi1, xi2 , xi3, …, xiL
R' = R ± u R ( P%)
The measurement uncertainty, uR
u R = BR2 + (tv ,95 PR )
2
where
PR = ±
(95%)
L
∑ [θi Pxi ]2
BR = ±
i =1
L
∑ [θ B
i
i =1
The degrees of freedom, v
2
L
2
∑ [θ i Pxi ]
v = L i =1
4
∑ [θ i Pxi ] / vxi
{
i =1
}
2
]
xi
Propagation Uncertainty Analysis to a result
Example: The density of a gas, ρ, which is believed to follow the ideal gas equation of state, ρ =
p/RT, is to be estimated through separate measurements of pressure, p, and temperature, T. the
gas is housed with in a rigid impermeable vessel. The literature accompanying the pressure
measurement system states an accuracy to within 1% of the reading an that accompanying the
temperature measuring system suggest 0.6oR. Twenty measurements of pressure, Np = 20, and
ten measurements of temperature, NT = 10, are made with the following statistical outcome:
p = 2253.91 psfa
S p = 167.21 psfa
T = 560.4o R
ST = 3.0o R
Where psfa refers to lb/ft2 absolute. Determine a best estimate of the density. The gas constant is
R = 54.7 ft lb/lbm oR
Known:
p , S p , T , ST
ρ = P / RT R = 54.7 ft lb/lbm o R
Assume: Gas behaves as an ideal gas
Solution: Find
ρ ' = ρ + uρ
Propagation Uncertainty Analysis to a result
[
u ρ = B 2 + (tv ,95 P )
]
[(θ P ) + (θ P ) ]
2 1/ 2
(95%)
where v =
p
(θ P )
4
p
B = ± (θ p B p ) + (θT BT )
2
where
2
P = ± (θ p Pp ) + (θT PT )
2
ρ = P / RT R = 54.7 ft lb/lb m o R
θp =
∂ρ
1
=
∂p RT
2 2
2
θT =
∂ρ
p
=−
∂T
RT 2
2
p
p
T
T
/ v p + (θ T PT ) / vT
4