2.2 M-ary Baseband Pulse Amplitude Modulation (PAM)
advertisement
")
56
2.2 M-ary Baseband Pulse Amplitude Modulation (PAM)
2.2 M-ary Baseband Pulse Amplitude Modulation (PAM)
M-ary baseband pulse amplitude modulation is a one-dimensional signal set with basis function
φ0 (t) = p(t)
(2.20)
where p(t) is any unit energy pulse such as those described in Appendix B. The notation developed
in the preceding sections is extended to denote a symbol sequence with a new symbol occurring
every Ts seconds. The resulting PAM signal is
X
a(n)p(t − nTs )
(2.21)
s(t) =
n
where the subscript “0” has been dropped on the symbol value a and an index n has been added
to denote the n-th symbol in a sequence of symbols. The subscript n on the summation symbol
means that the sum is over n and may be finite (for a finite data sequence) or infinite if an infinite
data sequence is assumed. When it is important, limits on the summation will be explicit.
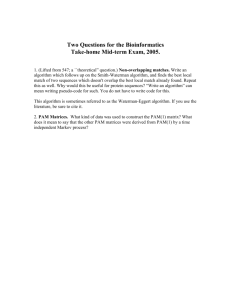
Some samples constellations for baseband PAM are shown in Figure 2.6. Note that except for
M = 2, the constellations points do not all have the same energy. For M = 4 the average symbol
energy is
Eavg =
(−3)2 + (−1)2 + (+1)2 + (+3)2
=5
4
(2.22)
and for M = 8 the average symbol energy is
Eavg =
(−7)2 + (−5)2 + (−3)2 + (−1)2 + (+1)2 + (+3)2 + (+5)2 + (+7)2
= 21.
8
(2.23)
For the general case of M-ary PAM, the constellation points are evenly spaced along the constellation axis at locations
−M + 1, −M + 3, . . . , −1, +1, . . . , M − 3, M − 1
(2.24)
The average energy of the general M-ary PAM constellation is
Eavg =
M2 − 1
.
3
For each constellation, the minimum Euclidean distance is 2.
(2.25)
Linear Modulation
57
–1
+1
(a)
–3 –1
+1
+3
(b)
–7
–5
–3 –1
+1
+3
+5
+7
(c)
–M+1 –M+3
–3
–1
+1
+3
M–3 M–1
(d)
Figure 2.6: Baseband PAM constellations for M = 2 (a), M = 4 (b), M = 8 (c), and general M ,
(d).
58
2.2 M-ary Baseband Pulse Amplitude Modulation (PAM)
2.2.1 Continuous-Time Realization
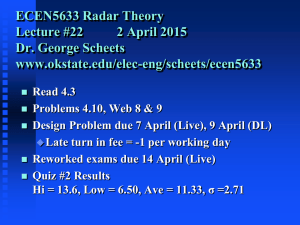
The PAM modulator using continuous-time processing is illustrated in the upper portion of Figure 2.7. The input is a serial bit stream where new bits arrive every Tb seconds. Bits are converted to log2 M bit symbols by the serial to parallel converter which outputs a new symbol every
Ts = log2 (M ) × Tb seconds. Thus, the symbol rate is 1/(log2 M ) times the bit rate. The log2 M
bits form the address to a single look-up table that stores the symbol values specified by the constellation. Conceptually, the series of look-up table outputs forms a weighted impulse train
i(t) =
X
a(n)δ(t − nTs )
(2.26)
n
that drives the pulse shaping filter with impulse response p(t). The output of the pulse shaping
filter is the pulse train given by (2.21).
The matched filter PAM detector is illustrated in the lower portion of Figure 2.7. The received
waveform is the impulse train (2.21) plus noise. The matched filter is a filter whose impulse response is a time reversed version of the pulse shape as described in Section 2.1.4. The matched
filter output, x0 (t) is sampled at Ts -spaced intervals to produce a sequence of signal space projections that are used for detection. Detection uses the decision rule (2.14). The detector presented
in Figure 2.7 is an idealized system. It is assumed that the time instant the matched filter output is
to be sampled is known precisely. In a real system, this knowledge is provided by a symbol timing
synchronization subsystem.
The mathematical expressions for these operations are as follows. Let
r(t) = s(t) + w(t)
(2.27)
be the received signal where s(t) is the PAM pulse train given by (2.21) and w(t) is the additive
noise1 . The matched filter output is
Z
T2 +t
x0 (t) = r(t) ∗ p(−t) =
r(λ)p(λ − t)dλ.
(2.28)
T1 +t
Using (2.27) and (2.21), the matched filter output is
x0 (t) =
X
l
Z
Z
T2 +t
a(l)
T2 +t
p(λ − lTs )p(λ − t)dλ +
T1 +t
w(λ)p(λ − t)dλ
(2.29)
T1 +t
The noise term w(t) will be modeled as a zero-mean white Gaussian random process with power spectral density
N0 /2 Watts/Hz.
1
Linear Modulation
59
which may be expressed as
x0 (t) =
X
a(l)rp (lTs − t) + v(t)
(2.30)
l
where v(t) is the output of the matched filter due to the additive noise at the input (the second
integral in (2.29)) and rp (τ ) is the pulse shape autocorrelation function defined by
Z
T2
rp (τ ) =
p(t)p(t − τ )dt
(2.31)
T1
as described in Appendix B.
The matched filter output is sampled at t = kTs to produce the signal space projection
x0 (kTs ) =
X
a(l)rp ((l − k)Ts ) + v(kTs ).
(2.32)
l
As discussed in Appendix B, the autocorrelation function for all full response unit-energy pulse
shapes satisfies
1 m = 0
rp (mTs ) =
.
(2.33)
0 m 6= 0
Condition (2.33) also holds for partial response pulse shapes that satisfy the Nyquist no-ISI condition. As a consequence (2.32) may be expressed as
x0 (kTs ) = a(k) + v(kTs ).
(2.34)
This shows that the signal space projection consists of the true point plus a noise term. The effect
of the noise term is to perturb the position of x0 (kT ) in the signal space. The symbol decision
follows the rule (2.14) or the equivalent form given by (??) as described in Section ??. The detector
produces an erroneous output (i.e. a symbol error) when the noise term forces x0 (kTs ) to be closer
to a point in the signal space other than the point corresponding to the waveform that was sent. The
probability of error for M-ary PAM is derived in Section 2.2.3.
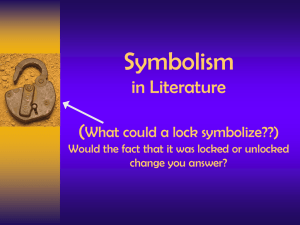
An important conceptual tool is a modulo-Ts plot of the matched filter output x0 (t). Examples
of these plots for the NRZ, MAN, HS, and SRRC pulse shapes are shown in Figure 2.8. Note that
the time axis on the plots are shifted so that the optimum sampling instant occurs in the middle of
the plot. The overlay is used to present all the possible trajectories of rp (τ ) as determined by the
symbol sequence. These plots for the HS and SRRC pulse shapes resemble a human eye. for this
reason, these plots are called eye diagrams.
60
2.2 M-ary Baseband Pulse Amplitude Modulation (PAM)
t
i (t ) = ∑ a (k )δ (t − kTs )
t
k
bits
pulse
shap ing
filter
LUT
0
S/P
r (t )
h (t ) = p (− t )
k
h (t ) = p (t )
log 2 M bits
matched
filter
s (t ) = ∑ a (k ) p (t − kTs )
x0 (t )
x0 (kTs )
decision
t = kTs
â (k )
eye d iagram measured here
Figure 2.7: A PAM modulator (top) and detector (bottom) using continuous-time processing.
Linear Modulation
61
(a)
(b)
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
−0.5
0
t/T
s
(c)
0.5
−0.5
0
t/T
s
(d)
0.5
0
t/T
0.5
1.5
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
−0.5
0
t/T
s
0.5
−1.5
−0.5
s
Figure 2.8: Eye diagrams for (a) the NRZ pulse shape, (b) the MAN pulse shape, (c) the HS pulse
shape, and (d) the SRRC pulse shape with a 0.5 roll-off factor.
62
2.2 M-ary Baseband Pulse Amplitude Modulation (PAM)
2.2.2 Discrete-Time Realization
The PAM modulator using discrete-time processing is illustrated in the upper portion of Figure 2.9.
The input bit stream is segmented into non-overlapping log2 M bit symbols which access M -ary
symbol values in the same manner as the PAM modulator based on continuous-time processing.
Here the pulse shaping is performed in discrete-time by using an FIR filter whose impulse response
consists of T -spaced samples of the pulse shape p(t). The symbol sequence {. . . , a(n − 2), a(n −
1), a(n), . . .} is converted to a discrete-time impulse train by upsampling by N where N is the
ratio of sample rate to symbol rate:
Ts
(2.35)
N= .
T
The upsampling operation inserts N − 1 zeros in between each symbol as shown. Interpolation is
performed by the pulse shaping filter to produce a discrete-time pulse train as shown. The discretetime pulse train is converted to a continuous-time pulse train by the ADC for transmission over the
waveform channel.
Three clock rates are used in the modulator. The first clock rate is the bit rate clock used to
clock the bits into the serial-to-parallel converter. The output of the serial-to-parallel converter is
clocked at 1/ log2 (M ) times the bit rate. This is the symbol rate clock. The pulse shaping occurs
at a rate that is N times the symbol clock rate. At a minimum the high sample rate should satisfy
the sampling theorem. In practice, this rate is as high as the system constraints will allow it to be.
The PAM detector using discrete-time processing is illustrated in the lower portion of Figure 2.9. The received signal is the transmitted pulse train (2.21) plus noise. T -spaced samples
of r(t) are produced by the ADC. These samples are filtered by a matched filter whose impulse
response consists of T -spaced samples of the time reversed pulse shape. The resulting matched
filter output is given by
T2
+n
T
x0 (nT ) =
X
r(mT )p((m − n)T )
(2.36)
T
m= T1 +n
where T1 and T2 define the time support of the pulse shape p(t). The matched filter output is
downsampled at n = k TTs to produce the sequence of signal space projections x0 (kTs ). The k-th
symbol estimate is made using the decision rule (2.14).
This detector is an idealized system in two ways. First, it is assumed that the ADC produces an
integer number of samples/symbol. In other words, that Ts /T is an integer. Since this assumption
is rarely true in practice, a resampling filter is often included in the system block diagram. The
second assumption is the exact symbol timing instant is known and coincides with a sample. In
reality, this will not be the case and a discrete-time symbol synchronizer must be used to estimate
the phase and frequency of the downsampling operation.
Linear Modulation
63
There are at least two clock rates in this system. The first clock rate is the sampling rate
used by the ADC to sample the received waveform. The sample rate must satisfy the sampling
theorem. Unlike the modulator, however, there is little need to sample the signal any higher than
the minimum rate given by the sampling theorem2 . The matched filtering occurs at the high clock
rate and the output of the matched filter is downsampled by N to one sample/symbol. The clock
rate here is the symbol rate. Symbol decisions are made at the clock rate. There is a third clock
rate, the bit clock, if the symbol decisions are mapped to log2 M bits.
The mathematical expressions for the receiver operations mimic those for the continuous-time
case. In this text, signal energies and correlations are referenced to continuous-time since they
were defined for the continuous-time signals3 . For example, the pulse correlation function can be
expressed in terms of T -spaced samples of p(t) using the backward difference approximation for
integration:
Z
T2
rp (τ ) =
p(t)p(t − τ )dt
T1
T2 /T
≈T
X
p(nT )p(nT − τ ).
(2.37)
n=T1 /T
From this the relationship between the signal energy in continuous-time and discrete-time is
Z
T2
Em =
T1
a2m p2 (t)dt
= a2m rp (0)
(2.38)
(2.39)
T2 /T
≈
a2m T
X
p2 (nT ).
(2.40)
n=T1 /T
The T -spaced samples of the received signal are
r(nT ) = s(nT ) + w(nT ) =
X
a(l)p(nT − lTs ) + w(nT ).
(2.41)
l
2
The complexity of symbol timing synchronization can reduced somewhat in certain cases by sampling at 2 or 4
times the minimum sampling rate given by the sampling theorem.
3
Preference is given the the continuous-time definitions since the continuous-time signals are what is transmitted
across the waveform channel.
64
2.2 M-ary Baseband Pulse Amplitude Modulation (PAM)
The matched filter output is
n+
x0 (nT ) =
T2
XT
Ã
X
=
n+
T2
XT
a(l)p(mT − lTs ) p(mT − nT ) +
w(mT )p(mT − nT )
T
m=n+ T1
T2
XT
a(l)
l
n+
l
T
m=n+ T1
X
!
n+
p(mT − lTs )p(mT − nT ) +
T
m=n+ T1
T2
XT
w(mT )p(mT − nT ).
(2.42)
T
m=n+ T1
Using the substitution i = m − n, the first summation in (2.42) can be expressed as
n+
T2
XT
T2
p(nT − lTs )p(mT − nT ) =
T
m=n+ T1
T
X
p(iT )p(iT − (lTs − nT ))
(2.43)
T
i= T1
=
1
rp (lTs − nT )
T
(2.44)
where the last step follows from (2.37). Using v(nT ) to represent the second term in (2.42), the
matched filter output may be expressed as
x0 (nT ) =
1X
a(l)rp (lTs − nT ) + v(nT ).
T l
(2.45)
The signal space projection is produced by taking every k TTs -th sample of the matched filter
output. Evaluating (2.45) at n = k TTs gives
x0 (kTs ) =
1X
a(l)rp ((l − k)Ts ) + v (kTs ) .
T l
(2.46)
When the pulse shape satisfies the Nyquist no-ISI condition, the signal space projection is
x(kTs ) =
a(k)
+ v (kTs ) .
T
(2.47)
The additive noise term moves the signal space projection x(kTs ) away from the true value a(k)/T
as was the case with continuous-time processing. A decision error occurs when the noise moves
x(kTs ) closer to a signal space point other than the one that was sent. The probability that this
occurs is derived in Section 2.2.3.
T
ADC
r (nT )
h (n ) = p (− nT )
matched
filter
k
pulse
shaping
filter
x0 (nT )
k=n
x 0 (kTs )
Ts
T
T
DAC
k
decisio n
s (nT ) = ∑ a (k ) p (nT − kTs )
h (n ) = p (nT )
i (nT ) = ∑ a (k )δ (nT − kTs )
T
N = s
T
↑N
k
â (k )
s (t ) = ∑ a (k ) p (t − kTs )
Figure 2.9: A PAM modulator using discrete-time processing and a DAC (top) and a PAM matched filter detector using discretetime processing with an ADC (bottom).
r (t )
log 2 M bits
LUT
0
S/P
bits
t
Linear Modulation
65
66
2.2 M-ary Baseband Pulse Amplitude Modulation (PAM)
2.2.3 Performance
Bandwidth
For independent and equally likely symbols, the power spectral density of the PAM pulse train
(2.21) is given by
σ2
Ps (f ) = a |P (f )|2
(2.48)
Ts
where P (f ) is the continuous-time Fourier transform in f = ω/2π of the pulse shape p(t). The
power spectral density is determined by the properties of the Fourier transform of the pulse shape.
The bandwidth efficiency is a measure of how well a modulation uses the spectrum it occupies.
The bandwidth efficiency is the ratio of the bit rate to the occupied bandwidth. Thus the bandwidth
efficiency has units bits/second/Hz. The bandwidth efficiency is strongly dependent on the definition of bandwidth. For example, if the 90% bandwidth B90 is the measure of bandwidth, then the
bandwidth efficiency for the NRZ, MAN, HS, and SRRC pulse shapes are
If the 99% bandwidth B99 is the measure of bandwidth, then the bandwidth efficiencies for the
same pulse shapes is drastically reduced:
Probability of Error
The decision rule (2.14) partitions the signal space into decision regions as illustrated for the case
of 4-ary baseband PAM in Figure 2.10. The probability of error is derived by first computing the
conditional probabilities of error and applying the total probability theorem to give the desired
result. In mathematical terms let s0 , s1 , . . . , sM −1 be the M constellation points and let P (E|a =
sm ) be the probability of error given the waveform corresponding to symbol sm was sent for m =
0, 1, . . . , M − 1. Applying the total probability theorem, the probability of error is
P (E) =
M
−1
X
P (E|a = sm )P (a = sm )
(2.49)
m=0
where P (a = sm ) is the probability that symbol sm was transmitted in the first place. Usually, it
is assumed that the transmitted symbols are equally likely (i.e., neither the data nor the transmitter
prefers sending one symbol over another). In this case
P (a = sm ) =
1
M
m = 0, 1, . . . , M − 1
(2.50)
and (2.49) reduces to
M −1
1 X
P (E) =
P (E|a = sm )
M m=0
(2.51)
Linear Modulation
67
All that remains is to compute the conditional probabilities of error.
The procedure for computing the conditional probabilities of error for M -ary PAM is demonstrated for the M = 4 case illustrated in Figure 2.10. The starting point is the signal space projection (2.45). Assuming a(k) = +A, x(kTs ) is a random variable whose probability density
function is illustrated in Figure 2.11 (a). The conditional probability of error P (E|a(k) = +A) is
the probability that x(kTs ) is outside the decision region corresponding to a(k) = +A. As it turns
out, the easiest way to compute this probability is one minus the probability that x(kTs ) is inside
the decision region corresponding to a(k) = +A. Following this line of reasoning,
¶
µ
2A
P (E|a(k) = +A) = 1 − P 0 ≤ x(kTs ) ≤
T
µ
¶
A
2A
= 1 − P 0 ≤ + v (kTs ) ≤
T
T
µ
¶
A
A
= 1 − P − ≤ v (kTs ) ≤
(2.52)
T
T
Note that the decision region boundaries have been scaled by T since the signal space projection
is also scaled by T . Applying the same procedure for the case a(k) = −A produces
µ
¶
A
A
P (E|a(k) = −A) = 1 − P − ≤ v (kTs ) ≤
(2.53)
T
T
which is the same as P (E|a(k) = +A) since the decision regions are the same shape. Assuming
a(k) = +3A, x(kTs ) is a random variable whose probability density function is illustrated in
Figure 2.11 (b). Following the same procedure as before
µ
¶
2A
P (E|a(k) = +3A) = 1 − P
≤ x(kTs )
T
µ
¶
2A
3A
=1−P
≤
+ v (kTs )
T
T
µ
¶
A
= 1 − P − ≤ v (kTs ) .
(2.54)
T
P (E|a(k) = +3A) is different from P (E|a(k) = +A) since the decision regions have different
shapes. The decision region for a(k) = +3A is “open ended” while the decision region for a(k) =
+A is not. Following the same procedure once more, it can be shown that
¶
µ
A
(2.55)
P (E|a(k) = −3A) = 1 − P − ≤ v (kTs )
T
which is the same as P (E|a(k) = +3A) since the decision regions are the same shape.
68
2.2 M-ary Baseband Pulse Amplitude Modulation (PAM)
The forgoing shows that the conditional probabilities of error reduce a computation involving
the random variable v (kTs ) and the constant A. The constant A is related to the received symbol
energy. For 4-ary PAM with the four constellation points shown in Figure 2.11, the average symbol
energy
Eavg = 5A2 .
(2.56)
Once the probability density function of v (kTs ) is known, evaluation of (2.52) – (2.55) is straight
forward. The probability of density function of v (kTs ) is derived next.
It was shown in Chapter ?? that when w(t) is white Gaussian random process with zero mean
and power spectral density N0 /2 Watts/Hz, T -spaced samples of the ideally bandlimited w(t) are
zero mean Gaussian random variables with autocorrelation function
E {w(mT )w(nT )} = σ 2 δ(m − n)
(2.57)
where the variance is
σ2 =
N0
.
2T
(2.58)
The noise component at the matched filter output, v(nT ) is given by
n+
v(nT ) =
T2
XT
w(mT )p(mT − nT ).
(2.59)
T
m=n+ T1
Since v(nT ) is a linear combination of the Gaussian random variables w(mT ), v(nT ) is also a
Gaussian random variable. The joint probability density function is determined completely from
the mean and auto-covariance of the sequence. The mean of each v(nT ) is
E {v(nT )} = E
T2
n+
XT
m=n+ T1
T
T
n+ T2
X
w(mT )p(mT − nT ) =
E {w(mT )} p(mT − nT ) = 0
m=n+ T1
T
(2.60)
Linear Modulation
69
and the auto-covariance is given by
T
T2
l+ T2
T
n+
X
X
0
0
E {v(nT )v(lT )} = E
w(mT )p(mT − nT )
w(m T )p(m T − lT )
m=n+ T1
T1
0
m =l+
T
T
n+ T2
=
X
m=n+
n+
=
X
T1
T
m0 =l+
T2
l+
XT
m=n+
= σ2
E {w(mT )w(m0 T )} p(mT − nT )p(m0 T − lT )
T1
T
T2
T
X
T1
T
n+
T
T
l+ T2
m0 =l+
σ 2 δ(m − m0 )p(mT − nT )p(m0 T − lT )
T1
T
T2
XT
p(mT − nT )p(mT − lT )
T
m=n+ T1
=
σ2
rp (−(n − l)T ).
T
(2.61)
The noise component in the signal space projection is a downsampled version of v(nT ). Clearly
v (kTs ) has zero mean. The correlation is
σ2
rp (−(k − l)Ts )
T
σ2
= δ(k − l).
T
E {v (kTs ) v (lTs )} =
(2.62)
(2.63)
where the last line is true only if the pulse shape satisfies the Nyquist no-ISI condition. In summary,
the random variables v (kTs ) are independent and identically distributed random variables with
zero mean and variance
σ2
N0
σv2 =
=
.
(2.64)
T
2T 2
Now back to the the probability of error for 4-ary PAM. The probabilities (2.52) – (2.55) can
be expressed in terms of the area under the upper tail of the standard Gaussian random variable,
denoted by the Q-function as described in Chapter ??:
Ãs
!
¶
A/T
2A2
= 2Q
= 2Q
P (E|a(k) = +A) = P
σv
N0
s
Ã
!
µ
¶
¶
µ
3A
2A2
A/T
P (E|a(k) = +3A) = P E|a(k) = −
=Q
=Q
.
T
σv
N0
µ
A
E|a(k) = −
T
¶
µ
(2.65)
(2.66)
70
2.2 M-ary Baseband Pulse Amplitude Modulation (PAM)
Note that the last equality follows from the relationship (2.64) Applying the total probability theorem assuming equally likely symbols gives
Ãs
!
2
3
2A
P (E) = Q
.
(2.67)
2
N0
Now using (2.56), the probability of error may be expressed as
!
Ãr
3
2 Eavg
.
P (E) = Q
2
5 N0
(2.68)
This shows that when a matched filter detector is used with perfect timing synchronization, the
probability of symbol error is a function only of the ratio of the average symbol energy and the
power spectral density level of the white noise.
Two normalizations are commonly used to facilitate comparisons between modulations with
different symbol sizes. The first is to reduce the symbol error probability to a bit error probability.
This is due to the notion that the fundamental quantity being transmitted is a bit, no matter how
the bits are mapped into symbols. As a consequence, the fundamental measure of reliability is the
bit error rate4 . The translation from symbol error probability to bit error probability follows from
the observation that the most likely symbol errors are those involving adjacent symbols. Using a
gray code, the bit patterns associated with adjacent symbols differ in only one position. Hence, the
most likely symbol errors produce one erroneous bit and log2 (M ) − 1 correct bits. Thus
Pb =
1
P (E).
log2 M
(2.69)
The translation from symbol error probability to bit error probability can be thought of as a
scaling of the “y-axis” in a probability of error versus signal-to-noise ratio plot. The scaling of the
“x-axis” in such a plot involves scaling the signal-to-noise ratio. Since the bit is the fundamental
quantity being transmitted, the bit energy is the fundamental unit of energy. The average bit energy,
Eb , is related to the average symbol energy, Eavg , by
Eavg = (log2 M ) × Eb .
Applying these two normalizations to (2.68) produces
Ãr
!
3
4 Eb
Pb = Q
.
4
5 N0
4
(2.70)
(2.71)
For a communication system where the data are grouped into frames or packets, many prefer the frame error rate
or packet error rate as the fundamental measure of reliability. This follows from the notion that if one or more bits in
a packet is in error, then none of the bits in the packet is of use to the end user.
Linear Modulation
71
Generalizing the forgoing to M -ary PAM, the probability of symbol error and bit error are
Ãr
!
Eavg
M −1
6
P (E) = 2
Q
(2.72)
M
M 2 − 1 N0
!
Ãr
2(M − 1)
log2 M Eb
Pb =
Q
6 2
.
(2.73)
M log2 M
M − 1 N0
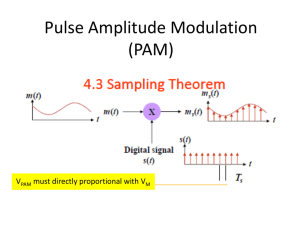
The probability of bit error (2.73) for M = 2, 4, and 8 is plotted in Figure 2.12. A vertical
slice through the plot is the line of constant bit energy. The probability of bit error increases as
M increases since the average symbol energy must be shared with more bits. A horizontal line
through the plot is the line of constant reliability. For a fixed probability of bit error, more bit
energy is needed as M increases. For example, at Pb = 10−6 binary PAM requires Eb /N0 = 10.6
dB, 4-ary PAM requires Eb /N0 = 14.6 dB, and 8-ary PAM requires Eb /N0 = 19.2 dB. 4-ary PAM
is said to be 4 dB worse than binary PAM at Pb = 10−6 and 8-ary PAM is 8.6 dB worse than binary
PAM at Pb = 10−6 .
However, these conclusions ignore bandwidth. 4-ary PAM is 2 times more bandwidth efficient
than binary PAM and 8-ary PAM is 3 times more bandwidth efficient than binary PAM. This can
be seen in one of two ways: assuming the bit rate is constant so that the bandwidth varies with
M , or by assuming the bandwidth is constant so that the bit rate varies with M . Either assumption
leads to the same conclusion. The bandwidth efficiency is measured in bits/second/Hz as described
above.
72
2.2 M-ary Baseband Pulse Amplitude Modulation (PAM)
decision
region for
a(k ) = –3A
decis ion
region for
a(k ) = –A
–3A
–A
decision
region for
a(k ) = +A
+A
decis ion
region for
a(k ) = +3A
+3A
Figure 2.10: The four decision regions for 4-ary PAM.
p (x0 (kTs ) a (k ) = + A )
–3A
–A
+A
+3A
(a)
p (x0 (kTs ) a (k ) = + 3 A )
–3A
–A
+A
+3A
(b)
Figure 2.11: Probability density function for matched filter output (a) when a/T = +A and (b)
when a/T = +3A.
Linear Modulation
73
0
10
M=2
M=4
M=8
−1
10
−2
Pb
10
−3
10
−4
10
−5
10
−6
10
0
5
10
Eb/N0 (dB)
15
20
Figure 2.12: Probability of bit error versus Eb /N0 for M-ary PAM for M = 2, 4, and 8.