Formations on Two-Layer Pursuit Systems
advertisement

2009 IEEE International Conference on Robotics and Automation
Kobe International Conference Center
Kobe, Japan, May 12-17, 2009
Formations on Two-Layer Pursuit Systems
Wei Ding
Gangfeng Yan Zhiyun Lin†
Abstract— The paper studies hierarchical pursuit strategies
for groups of mobile agents in the plane. It is shown that
fascinating global patterns emerge from simple two-layer pursuit schemes, including rendezvous, uniform circular motion,
complex circular motion, concentric circular motion, and concentric logarithmic spiral motion. Both rigorous analysis and
simulations are provided.
I. I NTRODUCTION
Local interactions of multiple agents may lead to some
amazing collective behaviors, which can be found a lot in
biological, physical, and social systems. In recent years,
distributed control of networked robot team that calls for
analysis of emergent behaviors attracts huge interest in the
field of robotics and control systems due to its broad applications in environmental monitoring, battlefield surveillance,
exploration in hazardous environment, and others (see [1],
[2] and the references therein).
Cyclic pursuit problem of ants, crickets, and frogs was
considered by Bruckstein et al. [3] in 1991. After that, many
subsequent work has been done on the analysis of global
emergent behaviors based on this pursuit scheme. Lin et
al. [4] showed that a group of free-moving mobile agents
converge to the centroid without overlapping trajectories
under linear cyclic pursuit if the agents are properly ordered.
Sinha and Ghose [5] generalized the linear cyclic pursuit
scheme allowing different gain for different agent. Cyclic
pursuit was also applied to a network of nonholonomic
vehicles in [6], [7]. Much recently, Pavone and Frazzoli [8]
improved the traditional cyclic pursuit strategy by rotating
the pursuit direction. Then some elegant collective motion
was achieved, such as circular motion and spiral motion.
Nevertheless, the collective motion was studied always under
the cyclic structure. In 2004, Williams et al. [9] introduced
hierarchical controllers and showed that stability at high
levels of the hierarchy is guaranteed for certain vehicle
communication infrastructures. Smith et al. [10] also used
hierarchical cyclic pursuit controllers to accelerate the convergence rate. Inspired by these work, we want to address
the problem—what kind of interesting global patterns can be
achieved in hierarchical pursuit systems?
In the paper, we first introduce a general model of
hierarchical pursuit systems. Then, particular attention is
paid to a two-layer cyclic pursuit scheme and a two-layer
†
Corresponding author.
The authors are with the Department of Systems Science and Engineering,
Zhejiang University, 38 Zheda Road, Hangzhou, 310027 P.R. China (E-mail:
dingweiren@gmail.com; ygf@zju.edu.cn; linz@zju.edu.cn)
The work was supported by National Natural Science Foundation of
China under Grant 60875074.
978-1-4244-2789-5/09/$25.00 ©2009 IEEE
hybrid pursuit scheme that incorporates both cyclic pursuit
and chain-like pursuit (namely, the pursuit structure does
not form a ring). Rigorous analysis on emergent collective
behaviors is given for both cases. It is shown that for the twolayer hierarchical cyclic pursuit system, rendezvous, circular
motion, and complex circular motion occur. For the two-layer
hybrid pursuit system, cyclic pursuit strategy is considered
at the high layer, and chain-like pursuit is used at the
lower layer. It is then shown that rendezvous, concentric
circular motion, and concentric logarithmic spiral motion
are achieved. Moreover, some control parameters can be
used to adjust the radius and angular speed of the motion.
These collective behaviors developed in the paper can be
applied to distributed robot teams in performing cooperative
tasks such as aggregation, exploration, and surveillance. Our
contribution in the paper is threefold. First, we explore the
fascinating collective behaviors for groups of agents with two
specific hierarchical pursuit strategies. The motivation behind
is to enhance the historical development of pursuit schemes
and present a novel approach to generate more interesting
and useful formations. The work generalizes the results of [8]
to a more complicated hierarchical structure. Second, we use
complex variables in analyzing system behaviors for mobile
agents in the plane, which greatly simplifies the analysis.
Finally, in our hierarchical hybrid pursuit strategy, control
parameters can be adjusted to provide extra flexibility so
that more desirable formations can be formed.
II. P RELIMINARIES AND SETUP
In this section, we formulate a two-layer pursuit problem
after introducing some graph notions and a result from onelayer cyclic pursuit.
A. Directed Graph and Laplacian
A directed graph G consists of a non-empty node set V =
{v1 , v2 , · · · , vn } and an edge set E ⊆ V × V. The directed
graph is then denoted as G = (V, E). An edge of G is written
as an ordered pair of nodes, e.g., (vi , vj ), meaning that it
leaves node vi and enters node vj .
The Laplacian of a directed graph G is an n-by-n matrix,
denoted by L, where its off-diagonal entry Lij is −1 if
∈ E and is 0 otherwise, and its diagonal entry
(vi , vj ) Lii = − j=1,...,n;j=i Lij .
B. Single Layer Pursuit
Suppose that there are n mobile agents in the plane. We
use zi ∈ C to represent the position of agent i in the plane.
The use of complex variables in the paper greatly simplifies
the proofs of our main results.
3496
Now consider the following local control law for each
mobile agent i
(zj − zi ),
żi = eια
j∈Ni
where ι is the imaginary unit, α ∈ [−π, π) is a rotation angle,
and Ni is the set of agents that agent i tries to pursue. That
is, agent i moves towards the centroid of its target agents
rotated by an angle α. The presence of rotation in the pursuit
strategy is to achieve more interesting collective behaviors.
We use a directed graph G of n nodes {v1 , . . . , vn } to
represent the pursuit structure of the group of agents. That
is, each node vi corresponds to an agent i and (vi , vj ) is
an edge of the graph if vj ∈ Ni . Thus, in vector form, the
dynamics of the group mobile agents is
ż = −eια Lz
where z = [z1 , z2 , · · · , zn ]T and L is the Laplacian of G.
Specially, when each agent i only pursues agent i + 1
modulo n, called cyclic pursuit, it gives a ring-like topology.
Then for this special structure, the Laplacian is a circulant
matrix, denoted by Lr = circ[1, −1, 0, · · · , 0]. The elements
of each row of the matrix are identical to those of the
previous row, but are shifted one position to the right and
wrapped around. Then, the system becomes
ż = −eια Lr z,
(1)
which is studied in [8]. Now we present a result for system (1) from [8], which will be used in the paper.
Theorem 2.1: ( [8]) Suppose kπ/n < |α| ≤ (k + 1)π/n
where k (0 ≤ k ≤ n − 1) is an integer. The following
statements hold:
(i) among the n−1 nonzero eigenvalues of −eια Lr , there
are k eigenvalues in the open right half plane;
(ii) among the n − 1 nonzero eigenvalues of −eια Lr , one
eigenvalue lies on the imaginary axis if
strength for group i, which can be distinct for different
groups, and Nj (G1 ) is the neighbor set of agent j in each
group according to the graph G1 . At high level, the groups
pursue each other according to the graph G2 in some sense.
In the paper, by saying that group i pursues group k, we
mean every member j in group i pursues the same labeled
≥ 0. That is,
member in group k with a strength dmember
j
when only considering the group pursuit control, we have
eιβ
(zkj − zij ), j = 1, . . . , n,
żij = dmember
j
k∈Ni (G2 )
where β is the rotation angle and Ni (G2 ) is the neighbor set
of group i according to the graph G2 .
Combining the above two layer control strategies, we
obtain the following hierarchical pursuit system
ż = Az := −eια D2 ⊗ L1 − eιβ L2 ⊗ D1 z,
(2)
where D1 = diag{dmember
, . . . , dmember
}, D2 =
n
1
group
group
diag{d1
, . . . , dm }, and the symbol ⊗ denotes the
Kronecker product.
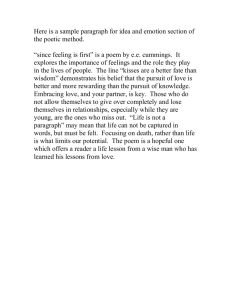
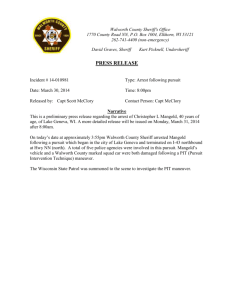
III. T WO -L AYER C YCLIC P URSUIT
In this section, we specifically focus on two-layer cyclic
pursuit. In other words, at lower layer, the members at each
group pursue each other in a cyclic manner and at high layer,
the groups pursue each other also in a cyclic manner by what
we have introduced in the previous section. An example is
given in Fig. 1 for an illustration.
Group 4
Group 3
α
Group 1
Group 2
β
High layer
1
Lower layer
2
3
νj ,j=1,...,n
µi ,i=1,...,m
Fig. 1. A two-layer cyclic pursuit Fig. 2. The eigenvalues of Lr1 , Lr2
before and after rotations.
for n = 3, m = 4.
|α| = (k + 1)π/n with k = 0, 1, · · · , n − 2.
C. Two Layer Pursuit
In this paper, we consider a hierarchical pursuit strategy
and study more interesting and complicated emergent behaviors. Consider m groups of mobile agents in the plane.
Each group has n members. We use a complex variable zij
to represent the position of the jth agent in the ith group
(agent ij). Let zi be the position vector of agents in group i,
namely, zi = [zi1 , zi2 , . . . , zin ]T . Moreover, we let z be the
T T
stacked vector [z1T , . . . , zm
] .
Let G1 and G2 be two directed graphs of order n and m,
respectively. Let L1 and L2 be their corresponding Laplacian.
At lower layer, the agents in the same group pursue each
other according to the graph G1 . Thus, when only considering
the lower layer pursuit control, the dynamics of agent ij is
eια
(zik − zij ), i = 1, . . . , m,
żij = dgroup
i
k∈Nj (G1 )
where α is the rotation angle, dgroup
≥ 0 is called the pursuit
i
Thus, the Laplacian matrices corresponding to these ringlike graphs G1 and G2 are Lr1 = circ[1, −1, 0, · · · , 0]n and
Lr2 = circ[1, −1, 0, · · · , 0]m . We suppose that all pursuit
strengths are one in this section. That is, D1 = In and D2 =
Im , where In and Im are identity matrices of order n and
m, respectively. Then, we obtain from (2) a two-layer cyclic
pursuit system, described by
ż = Ar z := −eια Im ⊗ Lr1 − eιβ Lr2 ⊗ In z. (3)
We first analyze the eigenvalues and eigenvectors of Ar ,
and then the collective behaviors emergent from the local
hierarchical cyclic pursuit strategy.
A. Eigenvalues and Eigenvectors
We are going to obtain the eigenvalue distribution of Ar
after presenting a preliminary result on Kronecker product.
Lemma 3.1: The matrix Ar can be diagonalized as
−eια Im ⊗ Λ1 − eιβ Λ2 ⊗ In , where Λ1 and Λ2 are diagonal
3497
matrices with diagonal entries being the eigenvalues of Lr1
and Lr2 , respectively. Moreover, the eigenvectors of Ar are
p2i ⊗ p1j where p1j and p2i (i = 1, . . . , m, j = 1, . . . , n) are
the eigenvectors of Lr1 and Lr2 , respectively.
Proof: Let P1 be the matrix composed of p1j , j = 1, . . . , n
and let P2 be the matrix composed of p2i , i = 1, . . . , m.
Then we have Λ1 = P1−1 Lr1 P1 and Λ2 = P2−1 Lr2 P2 .
According to the properties of Kronecker product, it follows
that
(P2 ⊗ P1 )−1 (eια Im ⊗ Lr1 )(P2⊗ P1 )
= eια P2−1 P2 ⊗ P1−1 Lr1 P1
= eια Im ⊗ Λ1 .
Similarly, we obtain
(P2 ⊗ P1 )−1 (eιβ Lr2 ⊗ In )(P2 ⊗ P1 ) = eιβ Λ2 ⊗ In .
numbers, we write cij = ρij eιθij . Now we are ready to
present possible collective behaviors under two-layer cyclic
pursuit for the m groups of agents.
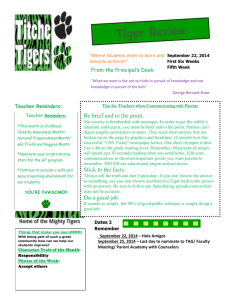
1) Rendezvous: It can be easily seen from Theorem 3.1
that 0 is a simple eigenvalue of Ar and all the others are in
the open left half space if and only if |α| < π/n and |β| <
π/m. Furthermore, we know that the zero eigenvalue is λ11
from the formula and the associated eigenvector is ξ11 =
[1, 1, · · · , 1]Tm×n .
Hence, limt→∞ z(t) = c11 ξ11 . Moreover, the complex
coefficient c11 can actually be calculated, which is the
centroid of the agents’ initial positions. This means the m
groups of agents rendezvous at the centroid. A simulation is
given in Fig. 3 where four groups with each group of three
agents are considered.
Thus Ar can be diagonalized as −eια Im ⊗ Λ1 − eιβ Λ2 ⊗ In
by the matrix P2 ⊗ P1 .
Also, from the above formula, it can be easily concluded
that the eigenvectors of Ar are p2i ⊗ p1j .
As both Lr1 and Lr2 are circulant matrices, it can be
obtained easily from some existing literature, e.g., [10], that
the eigenvalues of −Lr1 are
νj = ϕj − 1,
100
80
60
40
20
0
−20
j = 1, . . . , n,
−40
−60
and their associated eigenvectors are
−80
[ϕ0j , ϕ1j , · · · , ϕjn−1 ]T ,
ι2π(j−1)/n
th
where ϕj = e
are n
eigenvalues of −Lr2 are
µi = ωi − 1,
j = 1, . . . , n,
−100
−100
roots of unity. Likewise, the
i = 1, . . . , m,
and their associated eigenvectors are
[ωi0 , ωi1 , · · · , ωim−1 ]T ,
i = 1, . . . , m,
where ωi = eι2π(i−1)/m are mth roots of unity. An illustration is given in Fig. 2.
Theorem 3.1: The eigenvalues of Ar are the collection of
λij = νj eια +µi eιβ for i = 1, . . . , m, j = 1, . . . , n and their
associated eigenvectors are
ξij = [ωi0 , ωi1 , · · · , ωim−1 ]T ⊗ [ϕ0j , ϕ1j , · · · , ϕjn−1 ]T .
Proof: The conclusion follows directly from Lemma 3.1. Remark 3.1: For the hierarchical cyclic pursuit system, it
is interesting to observe that the eigenvalues are just sums of
any two eigenvalues with one for each single cyclic pursuit
system. Thus, some useful results related to eigenvalues can
be obtained and generalized from Theorem 2.1.
B. Collective Behaviors
In terms of the eigenvalues and eigenvectors of Ar , a
general solution for the system (3) is given by
z(t) =
m n
cij etλij ξij ,
(4)
i=1 j=1
where cij is a complex number depending on the initial
positions of the agents. In the polar form for complex
Fig. 3.
−80
−60
−40
−20
0
20
40
60
80
100
Rendezvous (α = −30 ◦ , β = −20 ◦ ).
2) Circular motion: Also from Theorem 3.1, we know
when
|α| < π/n
|α| = π/n
or
|β| = π/m,
|β| < π/m
the system matrix Ar has a simple pure imaginary eigenvalue
and a simple zero eigenvalue, and all others are in the open
left half plane.
(i) α = π/n and |β| < π/m.
For this case, the simple pure imaginary eigenvalue is
π
λ1n = νn eια + µ1 eιβ = −ι2 sin := −ιγ
n
and its associated eigenvector is
ξ1n = [1, 1, · · · , 1]Tm ⊗ [1, ϕ1n , · · · , ϕnn−1 ]T .
Thus, limt→∞ z(t) = c11 ξ11 + c1n e−ιγt ξ1n . For agent ij,
we have limt→∞ zij (t) = c11 + c1n e−ιγt ϕj−1
n . Recall that
= e−ι2π(j−1)/n . For simplicity,
c1n = ρ1n eιθ1n , and ϕj−1
n
we denote δjn = 2π(j − 1)/n. Then it follows that
n
lim zij (t) = c11 + ρ1n eι(−γt + θ1n − δj ) .
t→∞
From the above expression, we can see that the agents in
the same group eventually converge to a circular trajectory
centered at c11 with radius ρ1n and evenly spaced on the
circle with phase difference 2π/n. Moreover, the agents with
the same label in all the groups converge to move together.
3498
The motion is just the symmetric balanced pattern achieved
based on oscillators in [11].
For the case when α = −π/n and |β| < π/m, the
agents exhibit the same collective behaviors but move in
a reverse direction. A simulation is given in Fig. 4 for the
same hierarchical cyclic pursuit strategy as in Fig. 3 but with
different rotation angles.
100
100
80
80
60
60
40
40
20
20
0
0
−20
−20
−40
−40
−60
−60
−80
−80
−100
−100
−80
−60
−40
−20
0
20
40
60
80
100
−100
−100
obtain
lim
t→∞
m
1 zij (t) = c11 + ρm1 eι(−ηt + θm1 − δi ) ,
n j=1,...n
which means, the group center eventually moves on a circle
centered at c11 with radius ρm1 and frequency η. Moreover,
the centers of the m groups are evenly spaced on the circle
with phase difference 2π/m (see Fig. 6 for an illustration).
100
80
60
40
20
0
c11
−20
−40
−60
−80
−80
−60
−40
−20
0
20
40
60
80
100
−100
−100
Fig. 4. Circular motion when
α = −60 ◦ , β = −20 ◦ .
Fig. 5. Circular motion when
α = −30 ◦ , β = −45 ◦ .
Fig. 6. The white dots are
group centers and black dots
are agents.
(ii) |α| < π/n and β = π/m.
Due to the dual structure to the previous case, it can be
easily obtained that the simple pure imaginary eigenvalue is
π
λm1 = −ιη where η = 2 sin m
. Thus,
i−1
limt→∞ zij (t) = c11 + cm1 e−ιηt ωm
m
= c11 + ρm1 eι(−ηt + θm1 − δi ) ,
where δim = 2π(i − 1)/m.
The above formula implies that the agents in the same
group converge to move together on a circular trajectory
centered at c11 with radius ρm1 and frequency η. Furthermore, different groups are eventually evenly spaced with
phase difference 2π/m. A simulation for this case is shown
in Fig. 5.
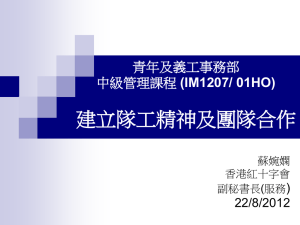
3) Complex circular motion: Consider now the case
|α| = π/n, |β| = π/m, and α + β = 0.
t→∞
ij
11
m1
+ θ1n − δjn )
+ρ1n eι(−γt
m
n
+ρ eι −(γ + η)t + θmn − δi − δj .
mn
Summing the trajectories of agents in the same group, we
−40
−20
0
20
40
60
80
100
Fig. 7.
Complex circular motion
(α = −60 ◦ , β = −45 ◦ ).
IV. T WO -L AYER H YBRID P URSUIT
In this section, we consider another two-layer pursuit
system combining a cyclic pursuit at the high layer and a
pursuit scheme in a chain-like topology at the lower layer.
In other words, at the lower layer within the same group,
agent 2 pursues agent 1, agent 3 pursues agent 2, . . . , and
agent n pursues agent n−1. An illustration example is given
in Fig. 8.
100
Group 4
Group 3
80
60
40
20
Group 1
Group 2
0
High layer
−20
1
−40
Lower layer
−60
−80
2
Thus we have the trajectory formula for agent ij as
follows:
m
lim z (t) = c + ρ eι(−ηt + θm1 − δi )
−60
For the agents in each group, they also have another
circular motion shrinking and expanding periodically as there
are another two circular terms with different frequency.
So they exhibit more complicated behaviors and generate
interesting and complex trajectories. A simulation is given
in Fig. 7 for four groups with three members each.
For the case, there are one simple zero eigenvalue λ11 , three
pure imaginary eigenvalues, and all the other eigenvalues are
in the open left half plane.
We only analyze the collective behavior for α = π/n and
β = π/m. The behaviors for the remaining cases are much
similar. It is straightforward from the previous two cases that
the three pure imaginary eigenvalues are
λ1n = −ιγ, λm1 = −ιη, and λmn = −ι(γ + η).
−80
3
Fig. 8. A two-layer hybrid
pursuit for n = 3, m = 4.
−100
−100
−80
−60
−40
−20
0
20
40
60
80
100
Fig. 9.
Rendezvous (α
−30 ◦ , β = −30 ◦ , k = 0.1).
=
At the higher layer (group level), it is still a cyclic pursuit,
but by saying group i pursues group j, we mean that only
the agent labeled 1 in group i pursues the agent labeled
1 in group j and the remaining agents do not have such
connection. That means D1 = diag{k, 0, · · · , 0}n where
k > 0. D2 is the identity matrix of order m.
3499
The Laplacian matrices corresponding to the graph G1 at
the lower layer and the graph G2 at the high layer are
Lc1
=
0
−1
0
..
.
0
0
1
0
−1 1
0
0
···
···
···
···
0
0
0
−1
1
(7)
ρs
,
(cos α+φ)2 +(sin α+γs )2
ρ′p = √
s +sin α
ψp′ = ψs + α − arctan γcos
α+φ .
Furthermore,
n×n
The two-layer hybrid pursuit system will exhibit several
fascinating collective behaviors. We first provide several
preliminary results on pursuit curves and then come back
to the two-layer hybrid pursuit systems.
Consider two points zp and zs in the plane. Suppose zp
pursues zs according to the following dynamics
żp = eια (zs − zp ),
(6)
where α is a rotation angle. Then we have the following
results.
Lemma 4.1: Assume zs performs a circular motion in the
plane, described by zs = os + ρs eι(γs t + ψs ) . If α ∈
(− π2 , π2 ), then zp (t) in (6) exponentially converges to another
circular motion z̄p (t) = os + ρp eι(γs t + ψp ) , where
(i) if φ < 0, the trajectory zp (t) exponentially converges
to zero;
(ii) if φ > 0, the trajectory zp (t) exponentially converges
a logarithmic spiral curve.
The proof is similar to that for Lemma 4.1.
Next, we will use the results obtained above to investigate
the collective behaviors of two-layer hybrid pursuit systems.
Theorem 4.1: For the two-layer hybrid pursuit system (5),
suppose α ∈ (− π2 , π2 ). Then,
π
, then the agents rendezvous;
(i) if |β| < m
π
(ii) if |β| = m , then the agents eventually achieve concentric circular motion;
π
(iii) if m
< |β| < 2π
m , then the agents eventually achieve
concentric logarithmic spiral motion.
Proof: Let ζ = [z11 , z21 , . . . , zm1 ]T . Then it can be easily
derived from (5) that ζ̇ = −keιβ Lr2 ζ. The solution ζ(t) can
be expressed as
ζ(t) =
m
ιβ
cl etkµl e ϑl ,
(8)
l=1
ρs
1+γs2 +2γs sin α
ρp = √
where cl is a complex number depending on the initial
condition ζ(0), µl = ωl − 1, ϑl = [ωl0 , ωl1 , . . . , ωlm−1 ]T ,
and ωl = eι2π(l−1)/m , l = 1, 2, . . . , m, are mth roots of
unit.
Notice that µ1 = 0 and ϑ1 = [1, 1, . . . , 1]T . In the polar
form for complex numbers, (8) becomes (for i = 1, . . . , m)
γs +sin α
cos α .
ψp = ψs + α − arctan
Proof: For system (6), the solution is given by
t
ια
ια
zp (t) = e−te zp (0) +
e−(t − τ )e eια zs (τ )dτ,
0
where zp (0) is the initial state of zp .
One obtains
t −(t−τ )eια ια
e
e zs (τ )dτ
0
ι(α+ψs ) ια ια + ρseeια +ιγs eιγs t − e−te .
= os 1 − e−te
zi1 (t) = c1 +
m
ρl1 eφl t eι(γl t+ψl1 +2π(i−1)(l−1)/m) ,
(9)
l=2
ια
= ιαe−t cos α e−ιt sin α . When α ∈
Note that e−te
π π
−te
(− 2 , 2 ), limt→∞ e
= 0. Therefore,
t→∞
′
z̄p′ (t) = ρ′p eφt eι(γs t+ψp ) ,
where
and Lr2 = circ[1, −1, 0, · · · , 0]m , respectively.
Thus, in vector form, the overall two-layer hybrid pursuit
system is given by
ż = Ah z := −eια Im ⊗ Lc1 − eιβ Lr2 ⊗ D1 z. (5)
lim zp (t) = os +
trajectory zp (t) in (6) exponentially converges to
ρs eι(α+ψs ) eιγs t
.
eια + ιγs
Thus, the conclusion follows when the expressions of ρp and
ψp are substituted.
From the lemma, we know that by pursuing a circular
curve, the trajectory of the pursuer also converges to a
circular curve with the same center os and frequency γs but
different radius and phase when α ∈ (− π2 , π2 ). Moreover,
it can be seen that the radius ρp and the phase ψp can be
controlled by the parameter α.
Lemma 4.2: Assume the trajectory of zs is of the form
zs = ρs eφt eι(γs t + ψs ) and let α ∈ (− π2 , π2 ). Then the
where ρl1 , ψl1 are real numbers depending on cl , and φl , γl
are the real part and imaginary part of the eigenvalues of
−keιβ Lr2 , respectively. In addition, it is worth to be pointed
out that c1 is the centroid of z11 (0), . . . , zm1 (0).
π
(i) If |β| < m
, then from Theorem 2.1 we know that the
m − 1 nonzero eigenvalues of −keιβ Lr2 lie in the open left
half plane, which means φl < 0 for l = 2, . . . , m in (9).
Thus, the trajectory zi1 exponentially converges to c1 for all
i = 1, . . . , m. Notice that in system (5)
żi2 = eια (zi1 − zi2 ),
i = 1, . . . , m
and recall that the solution zi1 (t) is the sum of terms with
the same form as in Lemma 4.1 and Lemma 4.2. Due to
the superposition principle in linear systems, it follows from
Lemma 4.1 and Lemma 4.2 that the solution zi2 (t) has
the same form as the solution zi1 (t) and also exponentially
converges to c1 . The same argument can be applied to zi3 ,
and so on. Thus, the agents rendezvous at c1 .
3500
π
, then either φ2 = 0 or φm = 0,
(ii) If |β| = m
and the remaining φl < 0. Without loss of generality, we
just consider φ2 = 0. For this case, it can be calculated
π
that γ2 = 2k sin m
. From the solution formula (9), the
agents z11 , . . . , zm1 converge to a circular curve centered
at c1 with radius ρ21 and angular frequency γ2 . Moreover,
they are evenly spaced on the circle with phase difference
2π/m. For agents z12 , . . . , zm2 , according to Lemma 4.1
and Lemma 4.2 together with the superposition principle,
we obtain that agents z12 , . . . , zm2 also converge to move
on a circle evenly spaced with the same angular frequency
γ2 as agent z11 , . . . , zm1 . The circle is also centered at c1
but has different radius
ρ21
ρ22 = .
2
1 + γ2 + 2γ2 sin α
In addition, the phase difference between zi2 and zi1 is
γ2 + sin α
.
cos α
The same argument can be applied to agents
z13 , z23 , . . . , zm3 and so on. Then we obtain that agents
z1j , z2j , . . . , zmj eventually move on a circle centered at c1
with the same angular frequency. The radius of the circle
can be calculated through the following formula
ρ2(j−1)
ρ2j = .
1 + γ22 + 2γ2 sin α
α − arctan
The phase lag between zij and zi(j−1) is
γ2 + sin α
cos α
and the phase lag between zij and z(i−1)j is 2π/m.
π
< |β| < 2π
(iii) If m
m , then from Theorem 2.1 we know
that among the m−1 nonzero eigenvalues of −keιβ Lr2 , only
one lies in the open right half plane. Hence, using Lemma 4.2
and almost the same argument, it follows that agents achieve
concentric logarithmic spiral motion eventually. The radius
of the spiral curves can be calculated according to (7). Remark 4.1: From the proof of the theorem, we can see
that the radius of the orbits for different group of agents can
be adjusted by α. Meanwhile, k can be used to change the
angular frequency of agents. Thus, it provides flexibility to
control groups of robots for different purpose.
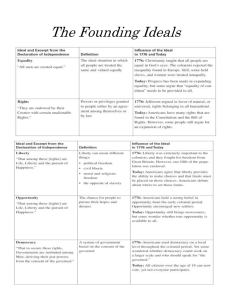
Simulations are given in Fig. 9, Fig. 10, and Fig.11 for
the two-layer hybrid pursuit system.
α − arctan
100
100
80
80
60
60
40
40
20
20
0
0
−20
−20
−40
−40
−60
−60
−80
−100
−100
Agents rendezvous, achieve concentric circular motion,
and concentric logarithmic spiral motion, respectively, when
different rotation angles α and β are used. In the simulations,
m = 4 groups with n = 3 agents in each group are
considered. The topology structure is shown in Fig. 8.
V. C ONCLUSIONS
The paper studies hierarchical pursuit strategies for groups
of mobile agents in the plane. It is shown that through
a simple two-layer cyclic pursuit scheme and a two-layer
hybrid pursuit scheme combining cyclic pursuit and chainlike pursuit, more fascinating collective behaviors occur,
including rendezvous, uniform circular motion, complex
circular motion, concentric circular motion, and concentric
logarithmic spiral motion. Moreover, as shown in the paper,
by adjusting some parameters, the collective motion can be
controlled so that it better serves real applications.
In the hierarchical pursuit study for vehicle networks,
there are still several issues remaining open. Robustness
study is one direction for the future as in the present form,
several collective circular motions are not robust and may
be difficult to be achieved in practice. Another direction is
to investigate the collective behaviors of hierarchical pursuit
systems incorporating more general topologies and more
complicated dynamics for the agents.
R EFERENCES
[1] R. Murray, “Recent research in cooperative control of multivehicle
systems,” Journal of Dynamic Systems, Measurement, and Control,
vol. 129, pp. 571–583, 2007.
[2] Z. Lin, Distributed Control and Analysis of Coupled Cell Systems.
VDM-Verlag, 2008.
[3] A. Bruckstein, N. Cohen, and A. Efrat, “Ants, crickets and frogs
in cyclic pursuit,” Center Intell. Syst., Technion-Israel Inst. Technol.,
Haifa, Israel, Tech. Rep, vol. 9105, 1991.
[4] Z. Lin, M. Broucke, and B. Francis, “Local control strategies for
groups of mobile autonomous agents,” IEEE Transactions on Automatic Control, vol. 49, no. 4, pp. 622–629, 2004.
[5] A. Sinha and D. Ghose, “Generalization of Linear Cyclic Pursuit With
Application to Rendezvous of Multiple Autonomous Agents,” IEEE
Transactions on Automatic Control, vol. 51, no. 11, pp. 1819–1824,
2006.
[6] J. Marshall, M. Broucke, and B. Francis, “Formations of vehicles
in cyclic pursuit,” IEEE Transactions on Automatic Control, vol. 49,
no. 11, pp. 1963–1974, 2004.
[7] A. Sinha and D. Ghose, “Generalization of nonlinear cyclic pursuit,”
Automatica, vol. 43, no. 11, pp. 1954–1960, 2007.
[8] M. Pavone and E. Frazzoli, “Decentralized Policies for Geometric
Pattern Formation and Path Coverage,” Journal of Dynamic Systems,
Measurement, and Control, vol. 129, no. 5, pp. 633–643, September
2007.
[9] A. Williams, S. Glavaski, and T. Samad, “Formations of formations:
hierarchy and stability,” in Proceedings of American Control Conference, pp. 2992–2997, June 2004.
[10] S. Smith, M. Broucke, and B. Francis, “A hierarchical cyclic pursuit
scheme for vehicle networks,” Automatica, vol. 41, no. 6, pp. 1045–
1053, 2005.
[11] R. Sepulchre, D. Paley, and N. Leonard, “Stabilization of planar
collective motion: all-to-all communication,” IEEE Transactions on
Automatic Control, vol. 52, no. 5, pp. 811–824, 2007.
−80
−80
−60
−40
−20
0
20
40
60
80
Fig. 10. Concentric circular
motion (α = −60 ◦ ,
β = −45 ◦ , k = 0.4).
100
−100
−100
−80
−60
−40
−20
0
20
40
60
80
100
Fig. 11. Concentric logarithmic spiral motion (α = −30 ◦ , β = −50 ◦ ,
k = 0.4).
3501