A Risk Measure For Income Streams
advertisement

A Risk Measure For Income Streams
Georg Ch. Pflug1 and Andrzej Ruszczyński2
Abstract
A new measure of risk is introduced for a sequence of random incomes adapted to
some filtration. This measure is formulated as the optimal net present value of a stream
of adaptively planned commitments for consumption.
The new measure is calculated by solving a stochastic dynamic linear optimization
problem which, for finite filtrations, reduces to a deterministic linear program.
We analyze properties of the new measure by exploiting the convexity and duality
structure of the stochastic dynamic linear problem. The measure depends on the full
distribution of the income process (not only on its marginal distributions) as well as on
the filtration, which is interpreted as the available information about the future. The
features of the new approach are illustrated by numerical examples.
1
Department of Statistics and Decision Support Systems, Universitaetsstrasse 5, University of Vienna,
1090 Wien-Vienna, Austria; e-mail: georg.pflug@univie.ac.at
2
Department of Management Science and Information Systems and RUTCOR, Rutgers University, 94
Rockefeller Rd, Piscataway, NJ 08854, U.S.A.; e-mail rusz@rutcor.rutgers.edu
1
1
Motivation
Since the seminal work of Markowitz it is well understood that consequences of economic
activity with uncertain success must be judged in two different and well distinguished
dimensions. The mean refers to the average result among a set of possible scenarios,
while the risk dimension describes the possible variation of the results under varying
scenarios. In the Markowitz model the risk is measured by the variance of the outcome
(cf. [8, 9]). In the mean–risk setting the decision maker is faced with a two-objective
situation: he/she wants to maximize the mean return and to minimize the risk at the
same time. As for all multi-objective situations, there is in general no uniquely defined
best decision, which is optimal in both dimensions and one has to seek for compromises.
The set of solutions which are Pareto-efficient in the sense of these two objectives is called
the mean–risk efficient frontier.
In some models for optimal decision making the two dimensions are often mixed by
introducing a nondecreasing concave utility function. Risk aversion, i.e. the degree of
taking the risk dimension into account, can be modeled by the negative curvature of the
utility function.
However, it is highly desirable to clearly separate the two dimensions and to make
the compromising strategy as transparent as possible, and the efficient frontier approach
provides such a transparency. In the first step, the efficient frontier is calculated for a
given decision problem and the non-dominated decisions are identified. In the second
step, the compromise decision may be chosen among the efficient candidates.
There is a vast literature on one-period decision models using several notions of measuring risk (see, e.g., [1, 7, 13, 14, 19]). In the multiperiod situation, however, most
proposals focus on the risk contained in the terminal wealth (see [3, 11, 12] and the references therein). The purpose of this paper is to propose a risk measure for multiperiod
models which incorporates the risk contained in intermediate incomes.
Suppose that I1 , . . . , IT is a stream of random incomes. A simple but inappropriate
way of defining the multiperiod risk would be to look at the marginal variables separately
and fabricate a combined risk measure as a combination of the univariate risk measures.
The distinction can be made clear by advocating an example which goes back to
Philippe Artzner. Suppose that a coin is thrown three times. In situation 1, a reward
of 1 is paid if the coin shows more heads than tails. In situation 2, the same reward is
paid if the last throw shows head. Do the two situations reflect the same risk for the
decision maker? If the whole experiment is done in a few seconds, one is inclined to say
‘yes’. But suppose that the throw of the coin happens just once a year. Then in situation
1 the decision maker knows her income one year ahead, which is a clear advantage over
situation 2. Thus situation 1 should turn out to be less risky than 2, although their
income variables have identical marginals. We shall return to this example in section 7.
To valuate the entire income stream and not just the terminal wealth appears to
be appropriate in many models. For instance, pension funds promise a income streams
to their clients. Since the rights emerging from a pension fund membership are not
bequeathable, clients are not interested in the terminal wealth at some future moments of
time, at which they may not be able to consume it. At least in Europe, pension funds are
2
only administrators and not owners of the funds. They are primarily interested in high
management fees, which come from a large number of customers. Customers can only be
attracted if a good income stream can be guaranteed. Thus it is in the own interest of a
pension fund to keep an eye on the customer’s income stream process (see, e.g., [10, 17]).
Besides that, the income stream risk must also be considered in other cases, where
the primal investment is just made for the purpose of getting the income at later periods.
Real options, or loans to companies are good examples here.
The paper is organized as follows. After an introductory section about one-period
measures, we introduce our concept of a multiperiod measure in section 3. Its properties
are analyzed in section 4, and section 5 contains explicit linear programming models
for the case of finitely many scenarios. In section 6 we consider mean–risk models for
our measures and compare them to models based on the terminal wealth distribution.
Illustrative examples are contained in section 7. All calculations can be done by standard
linear programming packages.
2
The one-period case
Let I be a random income variable defined on some probability space (Ω, F̃, P ). The risk
contained in I is caused by the lack of information about its exact value. A variable, but
predictable value of I is riskless. If a natural catastrophe, e.g. a flood, were completely
predictable, there would be no risk and no company would insure against it.
If a decision maker were clairvoyant, he/she would face no risk since he/she would
see the future in a deterministic way and would be able to adapt to it. For us, normal
humans, some but not all information about the future may be available.
The amount of information available may be expressed in terms of some σ-algebra
F ⊆ F̃. The extreme cases are the clairvoyant (F = F̃) and the totally uninformed
(F = F0 = {Ω, ∅}).
The ultimate goal of engaging in risky enterprises with uncertain income opportunities
is consumption. Consumption, however, can only be realized after deciding about the
amount one wants to commit for this purpose (to buy a house, a car etc.).
Suppose that the decision maker decides to commit an amount a. In this case, he/she
risks not achieving this decided target, since I may be less than a. However, he/she may
insure against the shortfall event, i.e. the event that I < a. Insurance comes at the price
of E(q[I − a]− ), for q > 1.3 The costs for insurance decrease the possible consumption.
If, on the other hand, some surplus is left after consumption, this surplus is discounted
by a factor d < 1, since saving does not provide the same satisfaction as the consumption
committed for.
The Expected Net Present Value (ENPV) of the consumption and savings is therefore
E(a + d[I − a]+ − q[I − a]− ).
A rational decision maker maximizes the ENPV with respect to the available information
3
We use the notation [x]+ = max(x, 0) and [x]− = max(−x, 0).
3
F; i.e., his/her utility functional is
UF (I) = max{E(a + d[I − a]+ − q[I − a]− ) : a is F measurable}.
(1)
It is evident that F1 ⊆ F2 implies that UF1 (I) ≤ UF2 (I), i.e., more information provides
more utility.
Since I is F̃-measurable and
a + d[v − a]+ − q[v − a]− = v − (1 − d)[v − a]+ − (q − 1)[v − a]−
is concave in a, one sees that
UF̃ (I) = E(I)
and
UF (I) ≤ E(I)
for any other σ-subalgebra F of F̃.
The risk R contained in the random variable I and the information F is defined as
the difference between the maximal utility (the utility of the clairvoyant) and the actual
utility.
RF (I) = E(I) − UF (I).
(2)
The just defined utility and risk measures are closely related to the notion of the
conditional-value-at risk (CV@R). Recall that the CV@R is defined as
CV@Rβ (I) = max{a −
1
E([I − a]− ) : a ∈ R}
β
(see Rockefellar and Uryasev [18]). We have the following representation (see [15]):
Z
1 β −1
G (p) dp
CV@Rβ (I) =
β 0
µ
¶
G(G−1 (β)) − β
−1
= E(I|I ≤ G (β)) −
G−1 (β),
β
where G(u) = P{I ≤ u} and G−1 (p) = inf{u : G(u) ≥ p}. Clearly, CV@Rβ (I) ≤
CV@R1 (I) = E(I). If I is a constant, then
CV@Rβ (I) = E(I) = I.
Lemma 1 Let I|F be the conditional distribution of I given the σ-algebra F. Then
UF (I) = dE(I) + (1 − d)E[CV@Rβ (I|F)]
and
RF (I) = (1 − d)[E(I) − E[CV@Rβ (I|F)]],
where β = (1 − d)/(q − d).
4
(3)
Proof. Suppose first that the σ-algebra is trivial, i.e. F = F0 = {Ω, ∅}. Since the
function appearing under the expectation in (1)satisfies
Ua (v) = a + d[v − a]+ − q[v − a]−
= a + d(v − a) + d[v − a]− − q[v − a]−
= dv + (1 − d)a − (q − d)[v − a]− .
(4)
we can transform (1) as follows:
n ³
´
o
q−d
UF0 (I) = dE(I) + (1 − d) max E a +
[I − a]− : a ∈ R
1−d
= dE(I) + (1 − d)CV@Rβ (I)],
with β = (1−d)/(q−d). Repeating now the same argument for the conditional distribution
of I given F and taking the expectation afterwards, one gets the general formulas
UF (I) = E[dE(I|F) + (1 − d)CV@Rβ (I|F)] = dE(I) + (1 − d)E[CV@Rβ (I|F)]
and
RF (I) = (1 − d)[E(I) − E[CV@Rβ (I|F)]].
2
If I is F measurable, then conditionally on F, I is a constant and therefore by (3),
UF (I) = E(I) and RF (I) = 0.
Example. Suppose that I follows a lognormal distribution and that the available
information is contained in a random variable J, which is correlated with I. To be more
precise, assume that I = exp(X1 ), J = exp(X2 ), where
µ
¶
µµ
¶ µ
¶¶
X1
µ1
σ12
σ1 σ2 ρ
∼N
,
X2
µ2
σ1 σ2 ρ
σ22
The CV@Rβ (Y ) of a Lognormal(µ, σ 2 ) distributed Y is
CV@Rβ (Y ) =
1 µ+σ2 /2
e
Φ(Φ−1 (β) − σ),
β
as can be seen by calculation. Let FJ be the σ-algebra generated by J. Using the
2
conditional distribution of I given J and the formula E(I) = eµ1 +σ1 /2 one gets that
p
2
2
UFJ (I) = deµ1 +σ1 /2 + (q − d)eµ1 +σ1 /2 Φ(Φ−1 (β) − σ1 1 − ρ2 )
and
2
2
RFJ (I) = (1 − d)eµ1 +σ1 /2 − (q − d)eµ1 +σ1 /2 Φ(Φ−1 (β) − σ1
p
1 − ρ2 ).
If the correlation ρ = 1, then RFJ = 0 and if ρ = 0, then RFJ = RF0 .
2
Notice that v 7→ Ua (v) is a concave, nondecreasing utility function for every fixed a.
Recall the following ordering relations for random variables.
5
Definition 1 Let I (1) and I (2) two random income variables.
• We say that first order stochastic dominance (I (1) ≺F SD I (2) ) holds, if E[U (I (1) ] ≤
E[U (I (2) )] for all nondecreasing functions U for which these expected values are
finite.
• We say that second order stochastic dominance (I (1) ≺SSD I (2) ) holds, if E[U (I (1) ] ≤
E[U (I (2) )] for all nondecreasing and concave, integrable functions U for which these
expectations are finite.
• We say that concave dominance (I (1) ≺CC I (2) ) holds, if E[U (I (1) ] ≤ E[U (I (2) )] for
all concave functions U for which these expectations are finite.
Since all Ua are nondecreasing and concave by (4), it follows that
UF0 (I) = max{E(Ua (I) : a ∈ R}
is monotonic w.r.t. second order stochastic dominance ≺SSD and a fortiori with first order
stochastic dominance ≺F SD and concave dominance ≺CC . By a similar argument, RF0 is
antitonic w.r.t. ≺CC .
More generally, if I (1) and I (2) are defined on the same probability space, and all
the conditional distributions satisfy (I (1) |F) ≺SSD (I (2) |F), then UF (I (1) ) ≤ UF (I (2) ).
Similarly, if (I (1) |F) ≺CC (I (2) |F), then RF (I (1) ) ≥ RF (I (2) ).
It is necessary to require the ordering of all conditional distributions.
Example 1 Let the probability space have three points, ω1 , ω2 , ω3 , each having probability 1/3. Let I (1) (ω1 ) = 1.01, I (1) (ω2 ) = 1.015, I (1) (ω3 ) = 1.03; I (2) (ω1 ) = 1.01501,
I (2) (ω2 ) = 1.0301, I (2) (ω3 ) = 1.0101. Choose q = 1.2, d = 0.93 and F = {{ω1 , ω2 }, ω3 }.
Then
UF (I (1) ) = 1.0175 > UF (I (2) ) = 1.0174,
but I (1) ≺SSD I (2) .
Notice that UF is translation-equivariant, i.e. for all constant b
UF (I + b) = UF (I) + b.
(5)
This follows directly from the definition.
In contrast, RF (I) is translation-invariant, i.e. for all constant b
RF (I + b) = RF (I).
Since Uλa (λv) = λUa (v), UF and RF are (positively) homogeneous, i.e.
UF (λI) = λUF (I)
RF (λI) = λRF (I).
6
(6)
U is concave and R is convex in the following sense: If I1 and I2 are two income
variables (possibly dependent), then
UF (pI1 + (1 − p)I2 ) ≥ pUF (I1 ) + (1 − p)UF (I2 )
(7)
RF (pI1 + (1 − p)I2 ) ≤ pRF c(I1 ) + (1 − p)RF (I2 ).
(8)
and
To prove (7) suppose that UF (I1 ) = E(Ua1 (I1 )) and UF (I2 ) = E(Ua2 (I2 )). Then, using
(4), we obtain
UF (pI1 + (1 − p)I2 ) = max E(Ua (pI1 + (1 − p)I2 )
a
≥ E(Upa1 +(1−p)a2 (pI1 + (1 − p)I2 )
≥ EpUa1 (I1 ) + (1 − p)Ua2 (I2 ))
= pUF (I1 ) + (1 − p)UF (I2 ).
Inequality (8) is easily deduced from that.
If we compound I1 and I2 with probability p, i.e.,
(
I1 with probability p,
I=
I2 with probability 1 − p,
then E(Ua (I)) = pE(Ua (I1 )) + (1 − p)E(Ua (I2 )) and thus
UF (I) ≤ pUF (I1 ) + (1 − p)UF (I2 ).
Artzner, Delbaen, Eber and Heath [2] have introduced the notion of a coherent risk
measure as a measure being translation-equivariant (they call it translation-invariant),
positive homogeneos, convex in the sense of (8) and monotonic w.r.t. pointwise ordering
(see also [5]). Thus −UF is a coherent risk measure in the sense of [2], but RF is not since
it is translation invariant in the sense of (6).
3
Risk of multiperiod income streams
Suppose now that I1 , I2 , . . . , IT is a stream of random incomes which arrive at times
1, 2, . . . , T . We denote by (Ω, F, P) the probability space on which these random variables
are defined. Together with that, a filtration {Ft }, t = 1, . . . , T , is defined, so that It is Ft measurable for each t = 1, . . . , T . The σ-subfield Ft represents the information available
at time t. We take the convention that F0 = {∅, Ω}.
Analogously to the static case, let at be the amount to be consumed at time t. The
decision about at must be made at time t − 1, so at must be Ft−1 -measurable. The
consumption of one unit at time t gives a Net Present Value (NPV) of ct ≥ 0. The
shortfall costs are qt ≥ 0.
The expected shortfall costs are immediately subtracted from the consumption before
period t (this can be interpreted as an insurance cost). Any surplus occuring in period t
7
increases the income of the next period. The final surplus is discounted by a factor d ≥ 0.
We make the following assumptions about the sequences {ct }, {qt } and the constant d:
ct ≤ qt , t = 1, . . . , T,
ct+1 ≤ ct , t = 1, . . . , T − 1,
d ≤ cT .
(9)
Let Kt be the (random) surplus carried from period t to period t + 1. We have K0 = 0
and
Kt = [Kt−1 + It − at ]+ ,
t = 1, . . . , T.
(10)
The shortfall Mt at period t is given by
Mt = [Kt−1 + It − at ]− .
(11)
Our objective is to maximize the expected consumption minus the expected shortfall
costs. This can be written as the following optimization problem:
U(I1 , I2 , . . . , IT ) = max E
T
hX
i
(ct at − qt Mt ) + dKT
(12)
t=1
s.t. at is Ft−1 -measurable for t = 1, . . . , T .
(13)
Similarly to the static case, we introduce the dynamic risk measure of the sequence
{It } as
R(I1 , . . . , IT ) = U(EI1 , . . . , EIT ) − U (I1 , . . . , IT ).
(14)
We shall prove in the next section that it is always non-negative, and that it possesses
most of the properties of the risk measure in the static case.
In order to analyze problem (12)–(13) we shall formalize it as a stochastic control
problem. We denote by Xt the space of Ft -measurable random variables having a finite
expected value: Xt = L1 (Ω, Ft , P). We also use the notation Et (·) for E(·|Ft ).
Problem (12)–(13) can be now stated as follows. Find random variables at ∈ Xt−1 ,
Mt ∈ Xt , and Kt ∈ Xt , t = 1, . . . , T , that constitute the solution of the problem
T
hX
i
max E
(ct at − qt Mt ) + dKT
(15)
t=1
s.t. Kt = Kt−1 + It − at + Mt , t = 1, . . . , T,
Kt ≥ 0, Mt ≥ 0, t = 1, . . . , T,
(16)
(17)
where K0 = 0 and the constraints (16)–(17) are understood in the ‘almost sure’ sense.
We can view (15)–(17) as a linear programming problem in abstract spaces. Let us
introduce Lagrange multipliers λt ∈ L∞ (Ω, Ft , P) associated with the constraints (16),
8
t = 1, . . . , T . The lagrangian takes on the form
T
X
L(a, M, K, λ) = E
(ct at − qt Mt ) + dEKT
−E
t=1
T
X
λt (Kt − Kt−1 − It + at − Mt ).
(18)
(19)
t=1
The dual functional is defined as
D(λ) =
sup
L(K, a, M, λ),
(a,M,K)∈X0
where
X0 = {(a, M, K) : at ∈ Xt−1 , Mt ∈ Xt , Mt ≥ 0,
Kt ∈ Xt , Kt ≥ 0, t = 1, . . . , T }.
(20)
We have
L(a, M, K, λ) = E
+E
=E
+E
T
T
X
X
(ct − λt )at + E
(λt − qt )Mt + E (d − λT )KT
t=1
T
−1
X
t=1
(λt+1 − λt )Kt + E
t=1
T
X
T
X
λt It
t=1
T
X
(ct − Et−1 λt )at + E
(λt − qt )Mt + E (d − λT )KT
t=1
T
−1
X
t=1
T
X
t=1
t=1
(Et λt+1 − λt )Kt + E
λt It ,
where we have manipulated (by conditioning) the coefficients in front of at , Mt and Kt
to obtain elements of the corresponding dual spaces L∞ (Ω, Ft−1 , P), L∞ (Ω, Ft , P), and
L∞ (Ω, Ft , P). It follows that D(λ) < +∞ if and only if the following conditions are
satisfied:
Et−1 λt
λt
λT
λt
= ct , t = 1, . . . , T,
≤ qt , t = 1, . . . , T,
≥ d,
≥ Et λt+1 , t = 1, . . . , T − 1,
(21)
(22)
(23)
(24)
and the dual problem is to find
min E
T
X
t=1
9
λt I t
(25)
subject to (21)–(24). It is worth noting that the multiplier process, {λt }, is a supermartingale.
Kuhn–Tucker optimality conditions and duality relations hold for our model (15)–(17),
similarly to the finite-dimensional case.
Theorem 1 The processes ât , M̂t , and K̂t , t = 1, . . . , T , constitute an optimal solution of
(15)–(17) if and only if there exists multipliers λ̂t ∈ L∞ (Ω, Ft , P), t = 1, . . . , T , such that
conditions (21)–(24) are satisfied together with the complementary slackness conditions
(understood in the ‘almost sure’ sense):
M̂t (qt − λ̂t ) = 0,
t = 1, . . . , T,
K̂T (λ̂T − d) = 0,
K̂t (λ̂t − Et λ̂t+1 ) = 0,
(26)
(27)
t = 1, . . . , T − 1.
(28)
Proof. Consider the affine operator G = (G1 , . . . , GT ) involved in (16):
Gt (a, M, K) = Kt − Kt−1 − It + at − Mt . t = 1, . . . , T.
We treat it as an operator from the space on which (a, M, K) are defined (the product
of the corresponding L1 spaces) to X = X1 × · · · × XT . Since the image of the set (20)
under G contains a neighborhood of 0 in X , our result follows from [4, Thm. 4, §1.1].
2
Theorem 2 Suppose that conditions (9) hold. Then for every sequence I1 , . . . , IT such
that E |It | < +∞, t = 1, . . . , T , the optimal values of problems (15)–(17) and (21)–(25)
are finite and equal.
Proof. A feasible solution to the primal problem (15)–(17) is given by at = E(It ),
with the other variables determined by (10)–(11). The objective value at this point
provides a lower bound for the optimal value of the dual problem. The feasible set of the
dual problem, given by (21)–(24), is convex, closed and bounded in L∞ (Ω, F1 , P) × · · · ×
L∞ (Ω, FT , P). Hence, it is weakly∗ compact (Alaoglu theorem, see [6, Thm. 6, p. 179]).
Therefore the dual problem has an optimal solution, λ̂. Then every solution (a, M, K)
of the conditions (26)–(28) which satisfies equation (16) is, by Theorem 1, an optimal
solution of the primal problem. Such a solution exists, because we can determine K and
M from (26)–(28), and then choose a (which is not constrained) to ensure (16).
2
It is clear that the optimal Lagrange multipliers λ̂t (ω) can be interpreted as the (random) costs of a unit of a credit at time t and scenario ω. With such costs neither is it
profitable to borrow nor to lend at each time t.
4
Properties of the dynamic risk measure
Directly from the definition, the functionals U and R are homogeneous. U is monotonic
(2)
(1)
in the following sense: If two income processes {It } and {It } are defined on the same
10
(1)
(2)
probability space (Ω, (Ft ), P) with the same filtration Ft and if It ≤ It a.s. for all t,
(1)
(1)
(2)
(2)
then U(I1 , . . . , IT ) ≤ U(I1 , . . . , IT ). More generally, if all conditional distributions
(1)
(2)
(1)
(1)
(2)
(2)
satisfy It |Ft−1 ≺SSD It |Ft−1 for t = 1, . . . , T , then U(I1 , . . . , IT ) ≤ U (I1 , . . . , IT ).
Finally, U is translation equivariant in the following sense:
U(I1 + b1 , . . . , IT + bT ) = U(I1 , . . . , IT ) + c1 b1 + c2 b2 + . . . cT bT ,
where b1 , . . . , bT are constants. We shall also show in this section that U is concave, so it
makes sense to call −U coherent in the sense of [2].
Let us start from the following observation.
Lemma 2 Suppose that conditions (9) hold and that each It it Ft−1 -measurable and integrable, t = 1, . . . , T . Then
U(I1 , . . . , It ) =
T
X
ct E(It ).
t=1
Proof. The solution
at = It ,
Mt = 0,
Kt = 0,
t = 1, . . . , T,
is feasible for the primal problem (15)–(17), while the solution
λt = ct ,
t = 1, . . . , T,
(29)
is
PTfeasible for the dual problem (21)–(25). Since both have the same objective values,
t=1 ct E(It ), by virtue of Theorem 2 they are optimal for their problems.
2
As a conclusion from this result we obtain a basic property of our risk measure.
Theorem 3 Suppose that conditions (9) hold. Then for every sequence I1 , . . . , IT such
that E |It | < +∞, t = 1, . . . , T , the risk measure (14) is finite and non-negative.
Proof. Under conditions (9) the deterministic solution (29) is feasible for (21)–(25).
Since a feasible solution for a dual problem always provides an upper bound for the
primal problem, for every sequence I1 , . . . , IT such that E |It | < +∞, t = 1, . . . , T , we
have
T
X
U(I) ≤ D(c) =
ct E(It ) = U(E(I)),
t=1
where the last equality follows from Lemma 2.
2
Theorem 4 Let Bt , t = 1, . . . , T , be σ-subalgebras such that Bt−1 ⊆ Bt ⊆ Ft for t =
1, . . . , T . Then for every sequence I, . . . , IT with E|It | < ∞ we have
R(E(I1 |B1 ), . . . , E(IT |BT )) ≤ R(I1 , . . . , It ).
11
(30)
Proof. By Theorem 2 both U(I1 , . . . , It ) and U(E(I1 |B1 ), . . . , E(IT |BT )) are finite. Let
µ̂t , t = 1, . . . , T , be the optimal solution of the dual problem (21)–(25) with the income
stream E(It |Bt ), t = 1, . . . , T . Then the multipliers µ̄t = E(µt |Bt ), t = 1, . . . , T , are also
optimal solutions of this problem. Indeed, the feasibility follows from
Et µ̄t = Et E(µt |Bt ) = Et µt = ct ,
t = 1, . . . , T,
and the optimality is guaranteed by
E
T
X
µt E{It |Bt } = E
t=1
T
X
µ̄t E{It |Bt }.
t=1
The multipliers µ̄t are also feasible for (21)–(25) with the income stream It , t = 1, . . . , T .
Therefore,
T
T
X
X
U(I1 , . . . , It ) ≤ E
µ̄t It = E
µ̄t E(It |Bt ).
t=1
t=1
Combining the last two relations and using (14) we obtain the required result.
2
A simple interpretation of Theorem 4 is that the additional information, represented
by Bt , reduces risk. In particular, if each It becomes known at the preceding period, there
is no risk at all, as we have shown it in Lemma 2.
Also, combining two income streams cannot increase risk.
Theorem 5 Let I = (I1 , . . . , IT ) and J = (J1 , . . . , JT ) be two streams of integrable incomes. Then for every p ∈ (0, 1)
R(pI + (1 − p)J) ≤ pR(I) + (1 − p)R(J),
that is, the functional R(·) is convex.
Proof. The result follows from Theorem 2. Let us denote by Λ the set of multipliers
defined by (21)–(24). We have
h
U(pI + (1 − p)J) = min pE
λ∈Λ
≥ p min E
λ∈Λ
T
X
t=1
T
X
λt It + (1 − p)E
T
X
i
λ t Jt
t=1
λt It + (1 − p) min E
t=1
λ∈Λ
T
X
λ t Jt
t=1
= pU(I) + (1 − p)U(J).
Since Lemma 2 implies that
U(pEI + (1 − p)EJ) = pU(EI) + (1 − p)U(EJ),
our result follows.
2
12
5
Finite filtrations
Let us consider in more detail the case when the filtration F = (F1 , . . . , FT ) is finite.
This filtration generates partitions of the probability space Ω, which may be represented
by a rooted tree of height T . Each node of the tree at layer t represents an atom of the
σ-algebra Ft . Subtrees represent subpartitions.
Suppose that the nodes of this tree are numbered {0, 1, 2, . . . N }, with 0 being the
root. Let
N = {1, 2, . . . , N }
be the node set (not including the root). We assume that there are N0 − 1 nonterminal
nodes in N and that
T = {N0 , . . . , N }
is the set of terminal nodes (leaves). If n is a node in N , then n− denotes its predecessor
and t(n) denotes its time stage (its distance from the root).
The nodes of the tree are marked by the probabilities of the corresponding elements of the partitions. Evidently, such a tree represents the filtered probability space
(Ω, (Ft )t=1,...,T , P ).
An income stream I = {It }, which is adapted to the filtration Ft , assigns values In to
each node n ∈ N .
We call such a valuated tree an income stream tree.
The commitment decisions are made at the nonterminal nodes (including the root),
i.e. a is a vector of length N0 with components a0 , . . . , aN0 −1 .
The calculation of the dynamic utility functional U turns out to be a linear program
defined on income stream trees. It reads
X
X
X
max
pn ct(n) an− −
pn qt(n) Mn +
pn dKn
a,M,K
n∈N
n∈N
n∈T
s.t. Kn + an− − Mn = In , t(n) = 1, n ∈ N ,
Kn − Kn− + an− − Mn = In , t(n) > 1, n ∈ N ,
Mn ≥ 0, Kn ≥ 0 n ∈ N .
(31)
This linear program has N0 + 2N variables and N equality constraints. Its optimal
value is U(I). The risk is defined as
X
R(I) =
ct(n) pn In − U(I).
n∈N
Let (zn ) be the vector of dual variables of (31). We introduce the notation n+ for the
set of all successors of the node n ∈ N \T . Setting zn = pn λn , we obtain the following
13
form of the dual problem:
min
λ
X
pn λn In
n∈N
1 X
pm λm , n ∈ N \T ,
pn m∈n+
1 X
cn =
pm λm , n ∈ N \T ,
pn m∈n+
s.t. λn ≥
(32)
λ n ≤ qn , n ∈ N ,
λn ≥ d, n ∈ T .
It is the discrete counterpart of the general dual problem (21)–(25). As before, the dual
process {λn } is a submartingale.
6
Mean–risk models
To illustrate the way in which our dynamic risk measure can be employed, let us now
consider the following situation. We have n random income streams Itj , t = 1, . . . , T ,
j = 1, . . . , n. Our objective is to create a portfolio,
I(x) =
n
X
xj I j
j=1
P
with xj ≥ 0, nj=1 xj ≤ C. With no loss of generality we may assume that C = 1. The
portfolio income stream can be characterized by two measures: the mean represented by
the expected net present value,
µ(x) =
T
X
ct E(It (x)) =
t=1
n
X
xj
j=1
T
X
ct E(Itj ),
t=1
and our risk measure
rd (x) = R(I1 (x), . . . , It (x)).
The mean–risk optimization model can be formulated as follows
min rd (x)
s.t µ(x) = m,
n
X
xj = 1,
j=1
x ≥ 0.
14
(33)
In the above problem the parameter m is varied over all values for which a solution exists.
Using Lemma 2 we can write this problem in a more explicit form:
T ³ ³X
n
hX
´
´
i
min E
ct
xj Itj − at + qt Mt − dKT
t=1
j=1
n
X
xj Itj − at + Mt ,
s.t. Kt = Kt−1 +
t = 1, . . . , T,
j=1
n
X
j=1
n
X
xj
T
X
(34)
ct E(Itj ) = m,
t=1
xj ≤ 1,
j=1
xj ≥ 0, j = 1, . . . , n,
Kt ≥ 0, Mt ≥ 0, t = 1, . . . , T.
By varying m over possible values of the mean we can reconstruct the mean–risk efficient
frontier of our model.
Another possibility is to base the mean–risk model on the distribution of the net
present value of I(x), given by
N (x) =
n
X
xj
T
X
ct Itj .
t=1
j=1
The mean is the same as before, while the risk can be measured by the static measure
based on (1):
rs (x) = E(N (x)) − max{E(a + d[N (x) − a]+ − q[N (x) − a]− )}.
a
The explicit linear programming formulation of model (33) (with the rik measure rd
replaced by rs ) reads:
min E
n
hX
j=1
s.t.
n
X
xj
xj
T
X
T
X
t=1
n
X
T
X
j=1
n
X
i
− a + qM − dK
t=1
j=1
xj
ct Itj
ct Itj − a + M − K = 0,
(35)
ct E(Itj ) = m,
t=1
xj ≤ 1,
j=1
xj ≥ 0, j = 1, . . . , n,
K ≥ 0, M ≥ 0.
The disadvantage of the latter approach is that it concentrates exclusively on the net
present value, ignoring the temporal variations.
15
:
»»
0»
X»
©
*
X
X
X
z
©©
1
:
»»
HH
j 0»
X»
XXz
X
1
:
»»
»
X»
X
©
*
X
©
z
X
@
@
R 0 ©©
HH
:
»»
HH
j 0»
X»
XXX
z
1
¡
µ
¡
0
©
HH
¡
¡
@
@
:
»»
0»
X»
©
*
X
X
X
z
©©
1
:
»»
HH
j 0»
X»
XXX
z
1
:
»»
»
X»
X
©
*
X
©
X
z
@
@ 0 ©©
R
HH
:
»»
HH
j 0»
X»
XXX
z
1
1
µ
¡
¡
¡
¡
@
@
0
0
0
0
0
0
©
HH
0
0
0
0
1
0
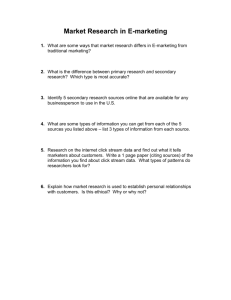
Figure 1: Income stream trees for Example 2. Left: Tree 1; Right: Tree 2.
7
Examples
Example 2 This example has already been mentioned in the Introduction. Suppose a
fair coin is thrown three times. Consider two situations:
Situation 1: The income is 1 at the final stage, if more heads than tails were counted.
Situation 2: The income is 1 at the final stage, if the last throw shows heads.
The corresponding income stream trees are shown in Figure 1, where an upmove means
heads and a downmove represents tails.
Evidently, the two cases leads to exactly the same marginal income distributions at
each stage. On the other hand, Situation 1 is more predictable and should lead to a
smaller risk.
We have solved the linear program (31) with the specification
c = [1, 0.95, (0.95)2 ],
q = [1.2, 1.2 · 0.95, 1.2 · (0.95)2 ],
d = (0.93)2 ,
and we have obtained the following results:
U(I (1) ) = 0.4419,
U(I (2) ) = 0.4325,
U(E(I (1) )) = U(E(I (2) )) = 0.5 · (0.95)2 = 0.4512
and therefore
R(I (1) ) = 0.0093 < R(I (2) ) = 0.0188.
This analysis shows that Situation 2 is riskier than Situation 1, indeed.
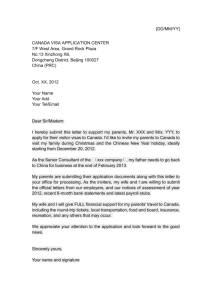
It is also interesting to look at the dual variables λ(1) and λ(2) given by (32). They
generate dual submartingale processes which live on the same tree as the income processes.
This is illustrated in Figure 2.
16
¡
µ
¡
.950
: .8649
»»
.9025 »
X»
©
*
X
X
z .9401
X
©©
©
HH
¡
¡
@
@
@
@
R
1.05
©©
HH
: .8649
»»
HH
j .9975 »
X»
XXX
z .9401
*
©©
.9025
: .8649
»»
»
X»
XXX
z .9401
¡
µ
¡
¡
¡
@
@
@
@
R
1.05
: .8649
»»
»»
.9739 X
©
*
X
X
X
z 1.083
©©
©
HH
: .8649
»»
HH
j .9261 »
X»
XXX
z .9401
*
©©
.950
: .9120
»»
HH
j .9975 »
X»
XXX
z 1.083
.9975
©©
HH
: .8649
»»
»
X»
XXX
z 1.083
: .8649
»»
HH
j .9025 »
X»
XXX
z .9401
Figure 2: The dual submartingale process for Example 2. Left: Tree 1; Right: Tree 2.
1
:
»»
»
X»
X
©
*
X
z
X
@
©©
@
R 0©
HH
:
HH
»»»
j 0»
XXX
z
X
1
¡
@
:
»»»
1»
XXX
©
*
X
z
©©
1©
HH
¡
µ
:
»»
HH
¡
j 1»
X»
X
X
¡
z
X
@
0
©
H
H
¡
µ
:
»»
HH
¡
j 0»
X»
X
X
¡
X
z
1
0
0
:
»»»
»X
1X
©
*
X
X
z
©©
¡
@
:
»»
»
X»
X
©
*
X
z
X
@
©©
@
R 0©
HH
:
HH
»»»
j 0»
XXX
z
X
@
0
1
1
0
1
1
0
0
1
1
1
0
0
Figure 3: Income stream trees in Example 3. Left: Tree 3; Right: Tree 4.
Example 3 We modify Example 2 in such a way that a positive income may also occur
at stages 1 and 2, but the marginals remain identical. Consider the income trees shown
in Figure 3.
Assuming that all arc probabilities are 0.5 one gets the result
U(I (3) ) = 1.3919,
R(I (3) )= 0.0344
U(I (4) ) = 1.3775,
R(I (4) )= 0.0487
Since the predictability occurs earlier in Tree 3, its risk is smaller, as expected. We
may illustrate here that hiding some information leads to larger risk. Suppose that the
outcome of throw 2 is not revealed. In this case Tree 3 changes to Tree 3a shown in Figure
4.
The utility and risk for Tree 3a are
U(I (3a) ) = 1.3825,
R(I (3a) ) = 0.0438.
17
¡
µ
¡
1
1/2
¡
¡
@
@
@
R
@
1/2
0
1/4
*
©©
©
- 1©
HH
Hj
3/4 H
1
3/4
*
©©
©
- 0©
HH
Hj
1/4 H
1
0
0
Figure 4: Tree 3a.
¡
µ
¡
1
©
H
¡
¡
@
@
@
@
R 0©
H
:
»»
1»
X»
©
*
X
XX
©
z
©
HH
:
»»
H
j 2»
X»
XXz
X
:
»»
0»
X»
X
©
*
X
©
X
z
©
HH
:
»»
H
j 1»
X»
XXz
X
: 2
»»
»»
-1 X
©
*
X
XX
©
z -1
2
©
©
H
HH
¡
µ
: -3
»»
¡
H
j 1»
X»
X
X
¡
X
z 0
¡
@
: 2
»»
»»
@
1X
X
©
*
X
©
X
z 1
@
©
R 1©
@
H
HH
: 1
»»
H
j 0»
X»
XXX
z 0
1
3
0
1
0
1
0
1
Figure 5: Income stream trees for Example 4. Left: Stream 1; Right: Stream 2.
As expected, the risk of Tree 3a is larger than the risk of Tree 3.
Example 4 Our next example concerns portfolio models for income streams. Let us
consider two streams as shown on Figure 5.
The third income stream is a shifted random walk: each upmove corresponds to the
income of 3 and each downmove to the income of 0. The mean and the dynamic risk
associated with these three income streams are as follows
µ(I 1 ) = 2.13, R(I 1 ) = 0.034
µ(I 2 ) = 2.46, R(I 2 ) = 0.065
µ(I 3 ) = 4.27, R(I 3 ) = 0.101.
For these three assets we have formulated and solved the two mean–risk portfolio problems: the model with the dynamic risk measure (34) and the model based on the net
present value (35).
18
6
Discounted Cumulative Flow
5
4
3
2
1
0
0
1
2
3
Period
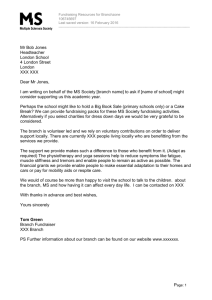
Figure 6: Performance of the portfolio generated by the dynamic mean–risk model.
We assumed the mean value m = 3. In the dynamic model we have obtained the
following portfolio
xd = (0.6, 0, 0.4),
while the static model (based on the net present value) yields
xs = (0, 0.69, 0.23).
As expected, the static model uses inflow 2, which has a better mean and a lower risk in
terms of the total cumulative flow, while the dynamic model uses inflow 1, which is more
predictable.
The corresponding cumulative flow trajectories for all eight scenarios are illustrated
in Figures 7 and 7. The cumulative flow for income {It } is defined recursively by
W (0) = 0,
Wt = Wt−1 + ct It ,
t = 1, 2, 3.
Our results confirm our expectations: the dynamic risk measure, when used in a mean–risk
optimization model, prefers solutions with more predictable income streams.
The images of the dynamic mean–risk frontier and the static frontier in the space
correponding to ur dynamic measure is presented in Figure 8. We see that for low values
of risk, there is a significant difference between the two approaches.
19
6
Discounted Cumulative Flow
5
4
3
2
1
0
0
1
2
3
Period
Figure 7: Performance of the portfolio generated by the static mean–risk model.
4.5
4
3.5
3
2.5
2
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0.11
Figure 8: The dynamic mean–risk frontier and the image of the static mean–risk frontier.
20
References
[1] F. Andersson, H. Mausser, D. Rosen and S. Uryasev, Credit risk optimization with
Conditional Value-at-Risk criterion, Mathematical Programming 89 (2001), pp. 273–
291.
[2] P. Artzner, F. Delbaen, J.-M. Eber and D. Heath, Coherent measures of risk, Mathematical Finance 9 (1999), pp. 203–228.
[3] D. Carino and W. T. Ziemba, Formulation of the Russell–Yasuda Kasai financial
planning model, Operations Research, 46 (1998), pp. 433–449.
[4] Ioffe A.D., Tihomirov V.D., Theory of Extremal Problems, North–Holland, Amsterdam, 1979.
[5] H. Föllmer and A. Schied, Convex measures of risk and trading constraints, Finance
and Stochastics (to appear).
[6] Kantorovich L.V., Akilov G.P., Functional Analysis, Pergamon Press, Oxford, 1982.
[7] H. Konno and H. Yamazaki, Mean–absolute deviation portfolio optimization model
and its application to Tokyo stock market, Management Science 37 (1991), pp. 519–
531.
[8] H. M. Markowitz, Portfolio selection, Journal of Finance 7 (1952), pp. 77–91.
[9] H. M. Markowitz, Mean–Variance Analysis in Portfolio Choice and Capital Markets,
Blackwell, Oxford, 1987.
[10] J. M. Mulvey and A. E. Thorlacius, The Towers Perrin global capital market scenario
generation system, in: Worldwide Asset and Liability Modeling, J.M. Mulvey and
W.T. Ziemba (Eds.), Cambridge University Press 1998, pp. 286–314.
[11] J.M. Mulvey, Introduction to financial optimization, Mathematical Programming 89
(2001), pp. 205–216.
[12] J. M. Mulvey and W. T. Ziemba, Asset and liability allocation in a global environment, In: Finance, R.A. Jarrow, V. Maksimović, W.T. Ziemba (Eds.), North–Holland
1995, pp. 435–463.
[13] W. Ogryczak and A. Ruszczyński, From stochastic dominance to mean–risk models: semideviations as risk measures, European Journal of Operational Research, 116
(1999), pp. 33–50.
[14] W. Ogryczak and A. Ruszczyński, On consistency of stochastic dominance and mean–
semideviation models, Mathematical Programming 89 (2001), pp. 217–232.
21
[15] W. Ogryczak and A. Ruszczyński, Dual stochastic dominance and related mean–risk
models, Rutcor Research Report 10-2001, Rutgers University, Piscataway 2001 (to
appear in SIAM Journal on Optimization).
[16] G. Ch. Pflug, Some remarks on the Value-at-Risk and the Conditional Value-atRisk. In: Probabilistic Constrained Optimization - Methodology and Applications, S.
Uryasev (Ed.), Kluwer Academic Publishers, ISBN 0-7923-6644-1 pp. 272–281, 2000.
[17] G. Ch. Pflug and A. Swietanowski, Dynamic asset allocation under uncertainty for
pension fund management, Control and Cybernetics, 28 (1999), pp. 755–777.
[18] R. T. Rockafellar and S. Uryasev, Optimization of Conditional Value-at-Risk, Journal
of Risk 2 (2000), pp. 21–41.
[19] W. F. Sharpe, A linear programming approximation for the general portfolio analysis
problem, Journal of Financial and Quantitative Analysis, 6 (1971), pp. 1263–1275.
22