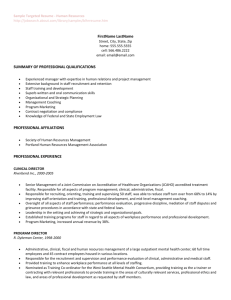
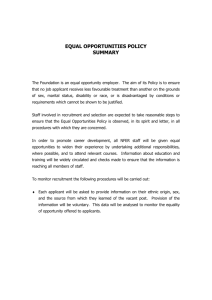
The Size Pri After AlI These Years
advertisement

References 9. 1. Dart, C., and tassium current 2. coronary Deussen, endothelial Arch. 406: 608-614, 1986. D. K., M. Kessler, and S. K. Knauff. blood flow and oxygen supply Regulation in skeletal Land. role and 543-594, 7. Marshall, J. M., J. Lloyd, and R. Mian. The vasopressin on the arterioles and venules muscle of the rat during systemic hypoxia. Lond. 470: 473-484, 1993. 8. Marshall, J. M., and J. D. Metcalfe. vascular changes induced in the systemic hypoxia. /. Physiol. 407: 10. Mian, T. Thomas, muscle vasodilatation Lond. R., and individual J. M. arterioles during and T. ATP-sensitive J. Physiol. Turner. in the 1-9, Marshall. rat link potas- in systemic 1993. Responses venules hypoxia. A K+ channels, 472: and systemic of the of in /. cardio1994. 12. 13. R., and 14. observed of rat skeletal /. Physiol. M. venules of rat skeletal Lond. 436: Lond. muscle in muscle 436: R., and J. M. Marshall. responses induced 485- in systemic Mian, Marshall, K+ and vasodilation hypoxia. Ralevic, R., The and Regulation of Vascular G. M. Rubanyi. New R. M. J. of adenosine and venules Berne, the Interactions Tone, York: J. G. Lond. in determining rat by systemic endothelial and in of rat J. Physiol. 75: 407-410, 1990. and G. Burnstock. from adenosine production Am. J. Physiol. 225: catand hypoxia. P. Kumar. substances and role hypoxia. adrenoreceptors induced in Exp. Physiol. V., J. Lincoln, U.S. Ryan p. 297-328. Rubio, p2 of arterioles 1991. in arterioles skeletal muscle 493:499-511,1991. roles in by systemic 499-510, dilator R., J. M. The evoked Mian, EndotheliaI, 1988. Marshall. responses Physiol. vasoactive 15. J. in between muscle influence of of skeletal /. Physiol. 385-403, Mian, echolamines Analysis of the cardiorat by graded levels of Lond. and hypoxia. 11. system in the cardiovascular response hypoxia in the anesthetized rat with PacO,, (Abstract). /. physiol. Land. 452: 319, 1992. Lond. 470: 463-472, 1993. J. M. Peripheral chemoreceptors regulation. Physiol. Rev. 74: sium 420: Louwerse, A. M., and J. M. Marshall. The role vasopressin in the regional vascular responses evoked the spontaneously breathing rat by systemic hypoxia. Physiol. 6, Marshall, vascular J. M., adenosine, 497,1991. muscle in dogs during hypoxemia. /. physiol. 431-446, 1990. Louwerse, A. M., and J. M. Marshall. The renin-angiotensin to systemic maintained 5. popig from artery. /. physio/. Land. 46: 767-786, 1993. A., G. Moser, and j. Schrader. Contribution of cells to cardiac adenosine production. Pf/uegers 3. Harrison, of capillary 4. N. B. Standen. Adenosine-activated in smooth muscle cells isolated Marshall, between of cells. In: edited Dekker, Dobson. in cardiac and 938-953, 1973. Release skeletal by 1992, Sites of muscle. The Size Pri After AlI These Years Timothy C. Cope and Martin J. Pinter Orderly recruitment of motor units is viewed by many as a fundamental motor control strategy. The size principle is an idea that attempts to explain how orderly recruitment operates. Does the size principle work? We summarize how the size principle came about, consider its mechanisms, and probe its limits. T wo observations have intrigued scientists interested in movement and the neuromuscular system. One is the specialization of motor units, each composed of an a-motoneuron and the skeletal muscle fibers it supplies; both nerve and muscle portions of motor units exhibit wide but correlated variation among several physiological properties. An expression of this correlated variation is the divisibility of motor units into types [one slow (S) type and two or three fast T. C. Cope is in the Dept. of Physiology, Atlanta, GA 30322, USA. M. J. Pinter Anatomy and Neurobiology, Medical vania, Philadelphia, PA 19729, USA. 280 NIPS Volume 10 l December 1995 Emory is in College University, the Dept. of of Pennsyl- (F) types], distinguishable by multiple parameters (2). The other interesting observation is that motor units are activated or recruited in accord with their physiological properties. This orderly recruitment, observed in a variety of skeletal muscles in several animal species, has been termed the size principle by Henneman (11). After almost 30 years of close scrutiny, the size principle remains a cornerstone in our understanding of movement control, and it retains considerable interest because the systematic behavior it describes is one of the best-characterized examples of how activity is coordinated among members of neuronal assemblies. Here 0886-1714/95 $3.00 0 1995 Int. Union Physiol. Sci./Am. Physiol. Sot. we discuss the size principle, consider its underlying mechanisms, and examine how (and whether) it can be integrated into recent thinking about more specialized motor-unit recruitment. The phenomenon Motoneurons follow one after another in generating their first action potentials as they are brought to threshold by excitatory synaptic input. This sequence holds in repeated presentations of the same excitatory stimulus, and the sequence is the same among those motoneurons recruited by different sources of excitation, both reflex and volitional. Thus motoneurons are generally recruited into activity in a regular, nonrandom sequence. The recruitment sequence is correlated with a variety of motor-unit properties. Correlations are found with both the conduction velocity of and the current generated by action potentials traversing the motoneuron’s axon. Motoneurons exhibiting slower conduction velocity and smaller action current are recruited before those with faster and larger values. This rank ordering is of interest because conduction velocity and current magnitude depend on the caliber of the axons; small axons conduct slowly, produce less current, and are recruited sooner than larger axons. Making the assumption that axon and soma size are correlated, Henneman (11) developed the size principle, the precept that small motoneurons are recruited before larger ones (Fig. 2A). Several other parameters correlate with recruitment sequence, for example, the force produced by isometric twitch and tetanic contractions of motor units; weaker motor units are recruited before more forceful ones. Some have argued that this is yet another expression of motoneuron size to the extent that smaller motoneurons, those with slower conduction velocity, produce less tension because they contact fewer muscle fibers. Other properties shown to correlate with recruitment sequence include twitch contraction time (slower units are recru ited before faster ones) and fatigabi I ity, (fatigue-resistant units are recruited before fatiguesusceptible ones). Predicting recruitment order. All of the motor-unit measures mentioned are equally good predictors of recruitment sequence when motor units are recruited in reflexes evoked by natural stimulation, e.g., muscle stretch and skin pinch (see Refs. 6, 7). However, in the decerebrate cat preparation from which these data were collected, natural stimulation is not effective in recruiting all units, and electrical stimulation of afferent fibers at high frequencies is needed to study the recruitment order of units with high thresholds. Using the latter approach, Zajac (15) reports that, among higher threshold units, recruitment sequence is poorly predicted by axonal conduction velocity but well predicted by motor-unit force, just as it is over the entire range of unit thresholds. The author (15) concluded that poor prediction of order by conduction velocity was characteristic of type F motor units. A test of that notion (7) has since shown that conduction velocity is an excellent predictor as shown by Bawa et al. (I), even among those type F units that can be recruited in stretch reflexes. Taken together, these studies lead to the conclusion that predictions of recruitment order based on conduction velocity apply to motor units over much of the recruitment range but break down for a subset of type F units with high recruitment threshold (see below). In contrast, the force produced by motor units accurately predicts order over the entire range of recruitment thresholds and stands as the best predictor, although some question remains about whether high-threshold units are recruited in the same order by electrical stimulation at high frequencies as they are by other means, e.g., volitionally or reflexively. The mechanism of orderly //. . . motoneurons are generally recruited into activity in a re !gular, nonrandom sequence. ” recruitment A motor unit is recruited when sufficient depolarizing current is provided by synaptic pathways to enable the motoneuron to begin firing action potentials. A motoneuron’s recruitment threshold is thus determined by the interaction between the organization and strength of synaptic inputs and by the factors that determine the motoneuron’s intrinsic responsiveness to synaptic currents. It follows that a collection of motoneurons exhibiting an orderly recruitment behavior must feature either a correspondingly orderly organization of synaptic input, an orderly organization of intrinsic motoneuron excitability, or a suitable combination of both factors. We must now consider the relative contributions of these factors in determining orderly recruitment. Intrinsic excitability of motoneurons. A number of studies have examined how intrinsic excitability is distributed among motoneurons and how this distribution is related to factors, such as conduction velocity or motor-unit force, that define motor-unit recruitment order. In these studies, the minimum amount of current needed to evoke a single action potential (rheobase current) has served as the primary index of intrinsic motoneuron excitability. The most Volume 10 * December 1995 NIPS //. . . orderly recruitment is a built-in feature of motoneuron populations. It 282 NIPS common and important result is the indication that orderly recruitment is a built-in feature of the investigated motor nuclei. However, some uncertainty remains concerning how well motoneuron intrinsic excitability is related to recruitment order, which particular motoneuron properties are most important in determining this excitability spectrum, and whether a classification scheme such as motor-unit type is at all useful in relating the motoneuron excitability spectrum to motor-unit recruitment. In a comprehensive study of the relationships between motoneuron electrical and motor-unit mechanical properties, Fleshman et al. (8) found that rheobase current was positively correlated with both conduction velocity and tetanic force across motor units in the cat medial gastrocnemius (MC) muscle. Thus those motoneurons that are generally recruited first during the stretch reflex (smallest force motor units and slowest conducting motor axons) also require the least amount of current to initiate an action potential. Evidence such as this suggests the existence of a functional structuring within motoneuron populations that directly links intrinsic motoneuron excitability (as defined by rheobase current) to those properties that have defined orderly recruitment (conduction velocity and motor-unit force). These correlations are the basis for the view that orderly recruitment is a built-in feature of motoneuron populations. Two additional considerations regarding these correlations have served to refine and, in one instance, challenge notions about how “orderly” orderly recruitment actually is. The first concerns the correlations between measures of motoneuron excitability and predictors of motor-unit recruitment order. Although Fleshman et al. (8) demonstrated correlations between rheobase current, conduction velocity, and motorunit force within data derived from the entire MG sample (i.e., across all motor-unit types), they did not find evidence for these relationships within data groups formed according to motor-unit type. Also associated with this pattern was an absence of within-type correlations between rheobase current and other motoneuron electrical properties (such as input resistance) that are expected to occur for biophysical reasons. Because of these negative findings, these authors suggested that motor-unit recruitment might be random within types and only become orderly when considered from the standpoint of the entire motor-unit population. Motor-unit type was thus viewed as the principal factor around which recruitment would be organized. Subsequent studies, however, have provided convincing evidence against this provocative notion and Volume 10 l December 1995 some of the data upon which it was based. Recruitment was perfectly ordered by conduction velocity for type S pairs of motor units in the reflexively activated soleus muscles of cats (I) and by motor-unit force for like-type pairs of motor units in electrically activated plantaris muscles of cat (15). Also, Gustafsson and Pinter (9) were able to demonstrate the expected correlations between rheobase current and input resistance within groups of motoneurons that, although not classified according to motor-unit type, possessed average properties very similar to the typed groups of Fleshman et al. (8). The second consideration concerns how well intrinsic excitability is related to recruitment order among motoneurons. As noted earlier, several studies of recruitment in decerebrate preparations have clearly demonstrated that the order is quite accurately predicted by conduction velocity,.motor units with lower conduction velocity being recruited first in as many as 97% of the tested pairs (1). This high degree of accuracy leads to the expectation that a measure of intrinsic excitability such as rheobase current should be highly correlated with conduction velocity if such orderly recruitment is based, at least in part, on a systematic variation of intrinsic excitability among the recruited motoneuron population. The problem is that this correlation has usually not been as good as expected. Fleshman et al. (8), for example, found a correlation of -0.38 between rheobase and conduction velocity among cat MC motoneurons, while the data of Gustafsson and Pinter (9) indicate a similar extent of correlation among untyped cat hindlimb motoneurons. An important factor to consider for resolving this apparent problem is that the motoneurons sampled in studies of recruitment vs. studies of intrinsic electrical properties are not likely to be identical. Whereas an intracellular study of rheobase current and conduction velocity has potential access to all motoneurons, evidence indicates that as much as 25% of the MC motoneuron population in decerebrate cats cannot be recruited during the stretch reflex (7). This “nonrecruitable” group features motoneurons that possess fast conduction velocities and that innervate forceful motor units. From other work, we know that these ccl Is are also Ii kely to possess high rheobase currents and are thus among those motoneurons with the lowest intrinsic excitability (8, 9). These results suggest that it may be more meaningful to consider how well intrinsic excitability (rheobase current) and conduction velocity are correlated in the “recruitable” motoneuron group, a subset that might reside in the lower neuron in the steady state, rheobase current (I,& is related to these parameters by Ohm’s law 50 100 Conduction FIGURE 1. Plot ity for cat hindlimb Pinter (9). An additional relationship is defined that clarifies the contributions of cell surface area (A,,,) and specific membrane resistivity (R,) to R,,. Thus of rheobase motoneurons. velocity current Data (m/s) vs. conduction from Gustafsson and Substitution of E9. 2 into E9. I yields 1RH 75% of the rheobase current range. The overall relationship between rheobase current and conduction velocity among cat MC motoneurons suggests that this correlation is probably better in the lower range of rheobase than in the higher. This may be seen in Fig. 1, where the linear relationship between these variables would clearly improve if rheobase data >I 8-20 nA were ignored. Direct experimental evidence (requiring a combined study of recruitment and intrinsic motoneuron properties) will be needed to establish how well both rheobase and conduction velocity predict order among recruitable motoneurons. Available evidence, however, is quite compatible with the notion that motoneuron intrinsic excitability plays an important role in determining recruitment order among those motoneurons that can be activated during the stretch reflex. The recruitment sequence among those motoneurons possessing the highest values of rheobase current (lowest intrinsic excitability) under conditions of natural stimulation is not vet clear and may never be because of experimental difficulties in examining the issue. It does not seem unreasonable, however, to speculate that the contributions of variations in intrinsic excitability to recruitment sequence would be just as important among this group of motoneurons. Indirect support for this would be the demonstration of a correlation between rheobase current among these nonrecruitable motoneurons and associated motor-unit force which, as noted above, is likely to be a better overall predictor of recruitment order than axonal P conduction velocity. If variations of intrinsic excitability among motoneurons function importantly in determining recruitment order, then which cellular factors are most important in determining the range of intrinsic excitability as measured by rheobase current? A variety of cellular factors determine motoneuron rheobase current (9). Two of the most important are motoneuron voltage threshold (VT,-,) and input resistance (RI,,,). In the simplest case of a uniformly polarized, spherical (2) RIN = &JAN veloc- = (hH x AN>/Rh4 (3) Equation 3 demonstrates how three critical factors can theoretically contribute to forming the range of motoneuron intrinsic excitability, and available evidence indicates that all three factors participate. In accordance with the predictions of the original size principle, studies demonstrate that motoneurons that innervate the most forceful motor units, and thus likely possess the fastest conduction velocities and largest rheobase currents (lowest intrinsic excitability), are about two to three times larger on average than their counterparts at the lower end of the excitability spectrum (2). Other evidence indicates that voltage thresholds may be higher (for long current pulses) and membrane resistivity lower among motoneurons with the lowest intrinsic excitability (9). The combined effect of these factors is evident from E9.3; the range of intrinsic excitability is expanded and threshold differences between motoneurons increased beyond that achievable by varying only one factor. Some have argued that variations of specific membrane properties (e.g., RM)are most important in establishing the range of motoneuron excitability ($14); others have taken the position that size (AN) is equally important (10). Perhaps the best way to summarize the evidence that has accumulated since the size principle was first formulated is to state that a range of intrinsic motoneuron excitability exists within investigated motor nuclei, that this range is established by the coordinated variation of a constellation of cellular factors (including cell size) among individual motoneurons, and that all these mechanisms operate such that orderly recruitment becomes the default mode of motor-unit recruitment. Role of synaptic input. If intrinsic excitability sets the default mode of motor-unit recruitment, then how best to view the role of synaptic input in the process of setting recruitment thresholds? Because the basic order appears more or less prespecified, it seems reasonable to propose that synaptic input systems are concerned with quantitative features of this order. One important Volume 10 l December 1995 “A variety of cellular factors determine motoneuron rheobase current . . . ” // the size princi,;d prescribes ... which units. . . must be recruited to achieve a specified amount of force.” quantitative feature is recruitment gain, defined as the number of motoneurons recruited for a given level of synaptic input (2, 13). An increase of recruitment gain, for example, would reflect a compression of the range of recruitment thresholds such that an increased number of motoneurons could be recruited by subsequent synaptic input. In a modeling study, Kernel1 and Hultborn (13) demonstrated how the activity of identically distributed synaptic inputs can combine to change average recruitment threshold but not recruitment gain across a motoneuron pool; changes of the latter require synaptic input systems that are differentially distributed across the pool. An important issue that arises when attempting to relate concepts and experimental findings is how the organization and efficacy of particular synaptic systems should be expressed. Heckman and Binder (10) have made a compelling argument for expressing the efficacy of synaptic input systems not in traditional terms of transmembrane voltage but rather in terms of the amount and polarity of current that actually reaches the spike-generating mechanisms located near the motoneuron cell body. To emphasize the functional importance of this portion of the total injected current, these authors (IO) have termed this quantity the “effective” synaptic current (I,,,) and have provided steady-state estimates of I, during experimental activation of several reflex systems, including the muscle spindle afferent (la) system responsible for the tonic-vibration reflex. An important advantage of expressing the efficacy and distribution of synaptic input in terms of a current is that these properties can be directly compared with the distribution of rheobase thresholds for the recipient population of motoneurons. For the la afferent system, estimates of I,,, demonstrate that motoneurons possessing the lowest rheobase currents (highest intrinsic excitability) receive more effective synaptic current than do motoneurons with the highest rheobase current (lowest intrinsic excitability). The effect of this type of distribution of synaptic input superimposed on the spectrum of intrinsic motoneuron excitability would be to expand the overall range of recruitment thresholds (i.e., decrease recruitment gain) and thus enhance threshold differences between motoneurons, perhaps increasing the “orderliness” of orderly recruitment. A primary role of synaptic input is to select the particular subsets of motor units that are active under certain conditions. In addition to differing in mechanical properties such as speed of contraction and force output, motor units also differ in the direction of their force output. Exploiting such differences probably makes important conVolume 10 l December 1995 tributions to the precision as well as the flexibility of motor control. It may, in fact, be useful to consider the notion of such selective control to be the next level up from orderly recruitment in a hierarchy of motor control strategies. Whereas the underlying mechanism of such selectivity would clearly be the province of the organizational features of synaptic input systems, additional, and somewhat contentious, issues arise when contemplating this possibility, such as how active groups of motoneurons are formed and whether orderly recruitment and the size principle continue to apply; these points are considered in more detail below. Functional value and limitations of the size principle Despite the difficulty of proving that the size principle represents some practical adaptation of the neuromuscular system, certain benefits have become axiomatic. Henneman and Mendell (11) pointed out that the size principle simplifies the computational task of organizing the numerous motor units comprising muscles (several hundred units for large muscles) by establishing a law of combinations; the size principle prescribes exactly which units, arranged in rank order, must be recruited to achieve a specified amount of force. An objection to this reasoning is that the task of selection may not be so daunting if the central nervous system addresses not tens or hundreds of motor units but, rather, only a couple of types of motor units, i.e., S and F types. There is, however, no direct demonstration of a recruitment scheme based solely on type; available evidence shows that recruitment is tightly ordered even among units belonging to the same type, S or F (see above). Recruitment ordered by motor-unit size also seems to benefit aspects of tension production. It ensures that the most frequently used units, the ones most easily recruited, are those that are resistant to fatigue. This recruitment strategy enhances energy efficiency. Another benefit is the provision for smooth accumulation of whole muscle force. Henneman and Mendell (11) recognized the advantage that would be gained from size-ordered recruitment of a population of motor units that tended to have a disproportionately larger number of weak units. In this case, newly recruited units, arranged from weak to strong, would contribute nearly constant increments in force throughout the range of whole muscle force; as tension builds slowly with the progressive recruitment of many weak units, each one contributes a relative amount of force that is similar to the force contributed by the few Motoneuron Number Recruitment Order Size Principle? 123456 A l O@(‘)()(-) ‘-+2+3 c FIGURE 2. 6 motoneurons Evidence (motor oeo..(-J for or against units) ranked size from principle small P--!-+2 taken to large from “size,” strong units recruited when whole muscle force approaches its maximum. Although discussion is outside the scope of this article, the reader should recognize that the force contributed by each unit also depends on motoneuron firing rate (2). In addition to these advantages, the size principle has limitations. It cannot by itself accommodate tasks and conditions that require that recruitment be organized around something other than motor-unit force or its correlates. Particular movements may require, for example, the selective activation of units that produce different directions of joint torque. The size principle does not incorporate this aspect of motor-unit function, but rather fixes the direction of movement as well as total force and other parameters contributed by the recruited units, and there is no way of varying that contribution. In other words, the size principle, operating by itself, would restrict the central nervous system to a single degree of freedom in the control of any one group of motor units. Additional degrees of freedom are gained by segregating motor units into groups, called task groups by Loeb and co-workers (5) and defined as the set of motor units recruited in order during one phase of motor activity. Control over the direction of movement results from the unique joint actions of the different task groups. An excellent illustration comes from the biceps femoris muscle of the cat. The anterior portion of this muscle, which extends the hip, can be activated independently of the posterior portion, which flexes the knee. Still more evidence for differential control comes from studies showing that human subjects recruit different motor units . within single muscles depending on the direction of joint movement (discussion and citations in Refs. 3 and 4). For example, motor units in one region of the biceps brachii muscle are recruited in elbow flexion, and units in another region are recruitment order e.g., increasing observed conduction in 3 different situations velocity or contraction for same force. recruited in forearm supination. This kind of behavior appears in nearly all human muscles examined, so it is widespread and not a peculiar feature of a few muscles. Although direct proof is lacking, the strong implication of the human studies is that motor units are assembled into task groups for purposes of achieving specific biomechanical actions. Although it is evident that control of limb biomechanics relies on selection of the appropriate group of motor units, the composition of a group is not easily defined. Anatomic boundaries do not always provide the basis for definition, because even within structurally delimited portions of muscles there is evidence for independent activation of more than one group. A further difficulty arises from uncertainty about whether motoneurons belong to one and only one group. The inability to recognize the criteria by which motor-unit groups are formulated foils attempts to arrive at unequivocal conclusions from some motor-unit recruitment data. Consider the following findings (discussion and citations in Ref. 3): when human subjects are instructed to engage triceps surae muscles in ankle extension and in controlled ankle flexion, it is observed that some of the motor units that were easily recruited in extension were silent during flexion, while others were selectively active in flexion. Another example comes from decerebrate cats in which skin pinch silences or decelerates ongoing firing of units with slow conduction velocity and accelerates the firing of or recruits units with faster conduction velocity. Two interpretations of these observations seem equally defensible (Fig. 2B). One rests on the assumption that all motoneurons supplying a single muscle belong to a single fixed group. Under this condition, selective inactivity of a usually low-threshold unit advocates a violation of the size principle. An alternative interpretation depends on the assumption that motor-unit Volume 10 l December 1995 “Additional degrees of freedom are gained by segregating motor units into groups . . .” // . . . the size principle is . . . one of the most fundamental principles in the organization of motorunit behavior. . .I’ groups can be reconstituted. Under this condition, silence of the low-threshold unit represents exclusion of that unit from the group, but all active units obey the size principle. The consequence of this indecision is that there is no resolution of the extent to which reversal of the size principle is an option in the control of movement. The weight of available evidence sways us and others (4, 11) away from indecision and toward the conclusion that there are no genuine violations of the size principle. When it can be unequivocally tested, i.e., when it is judged only for motor units that are active, the size principle holds in the great majority of cases. Reversals of the size principle (Fig. 2C) have been reported occasionally, e.g., when units are activated by electrical stimulation of the skin in human subjects (description and citation in Ref. 4). However, the functional importance of this finding is dubious in light of the failure of tactile stimulation of the skin to reverse the recruitment order of units with disparate thresholds either in humans (12) or in decerebrate cats (6). We are willing, therefore, to conclude provisionally that there are no functionally meaningful violations of the size principle. From this standpoint, even apparent violations (Fig. 2C) could reflect the coactivation of different motor-unit groups, with each group independently organized by the size principle. References 1. Bawa, P., M. D. Binder, Recruitment highly Volume 10 l December 1995 with 2. functional organization. The Nervous Physiol. 345-422. Burke, 3. and Motor 1981, sect. R. E. Selective Dahlem Issues, and complex muscles histochemical cal heterogeneity of the and predictors 1138,1991. Fleshman, 8. of order. J. W., 10. The fond. . 357: Segmental Henneman, Bethesda, . MD: unit motor Cutaneous properties 1983, . G. W. . and . and W. investigation motoneurons. of /. Neural mechanisms of motoneurons. In: edited by M. Oxford Univ. D. Binder Press, Functional 1990, organi- pool and its inputs. In: Handbook Nervous System. Motor Control. Physiol. and D., and gain: motor Sot., 1981, sect. Cutaneous control H. Hultborn. a mechanism relation in the 1, vol. II, facilitation of human of fingers in in Health York: Raven, role F. E. Coupling produced by motor Synaptic of importance effects for of motoneuron pools? of motoneuron membrane determination 165-181. Zajac, of recruitment edited Oxford the Press, 1990, p. 96-l 11. on the Res. prop- order. In: The by M. D. Binder and Univ. Press, 1990, p. of recruitment units: Brain “size order to the principle sis” revisited. In: The Segmental Motor System, by M. D. Binder and L. M. Mendell. New York: Univ. A. motor unit in the cat. /. 1984. York: Segmental Motor System, L. M. Mendell. New York: 15 1127- Sypert, L. M. Mendell. Am. 507:176-179,199O. Pinter, M. J. The erties 66: p. 253-261. Kernell, recruitment input-output 14 in the are equally precision grip. In: Motor Control Mechanisms and Disease, edited by J. E. Desmedt. New 13 of 1981. I. New units roles recruitment resistance, motoneurons pt. 1, chapt. 11, p. 423-507. Kanda, K., and J. E. Desmedt. large Functionally J. NeurophysioL System, E., and Univ. and mechaniactivation. Exp. unit 453-483, Motor in by M. V. The M. J. Pinter. An among cat spinal zation of motoneuron of Physiology. The 12 Oxford C. J., and M. D. Binder. the orderly recruitment and L. M. Mendel p. 182-204. 11 York: T. C. Cope. 46:1326-1338, Heckman, underlying edited G. E. Loeb. J. B. Munson, B., and properties Freund. 70: 1433-l 439, 1993. Motor unit recruitment in Friedman. Rheobase, input type in medial gastrocnemius Neurophysiol. In: recruitment fiber-type regionalization in differential muscle decerebrate cat. J. Neurophysiol. T. C., and B. D. Clark. 7. Cope, the decerebrate cat: several H.-J. System, hindlimb. Brain Res.85: 300-313, 1991. B. D., S. M. Dacko, and 6. Clark, stimulation fails to alter motor p. Concepts and New cat Am. 10, units. Control: Motor L. M. Mendell. MD: of motor by D. R. Humphrey Press, 1990, p. 75-95. 5. Chanaud, C. M., C. A. Pratt, good Bethesda, II, pt. 1, chapt. UK: Wiley, 1991, p. 5-21. B., and P. Bawa. Motor unit D. Binder and of Physiology. Motor In: The Segmental /. physiology Control. 1, vol. is velocity. 1984. anatomy, Reports. edited reflexes conduction recruitment Workshop Chichester, 4. Calancie, humans. E. Henneman. In : Handbook System. Sot., and in stretch their Neurophysiol. 52: 41 O-420, Burke, R. E. Motor units: Physiol. Does the size principle work after all these years? Extensive study has failed to unequivocally demonstrate functionally meaningful exceptions while providing abundant confirmation of the phenomenon of size-ordered recruitment. Thus the size principle is well established and can be thought of as one of the most fundamental principles in the organization of motor-unit behavior, with the formulation of motor units into task groups being another. As for the mechanism, however, available evidence suggests that the correlations of motoneuron size with factors such as intrinsic excitability and recruitment order are probably not strong enough to convince everyone that cell size is the decisive independent variable. In fact, this lack of 100% correspondence will likely incite continued exploration of the cellular strategies involved in manipulating a number of factors to accomplish the orderly operation of motoneuron ensembles. Nevertheless, the fact remains that size is a correlated factor, so from the perspective of mechanisms that underlie orderly recruitment, the size principle seems to work just fine, especially as a rubric. P. Ruenzel, of motoneurons correlated 9. Gustafsson, threshold Final perspectives NIPS order force hypotheedited Oxford