Assignment 4 - Arun K. Tangirala
advertisement

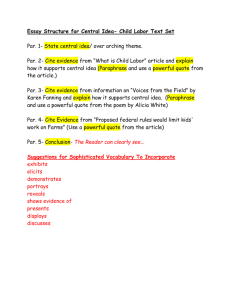
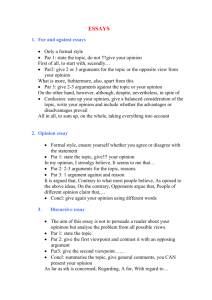
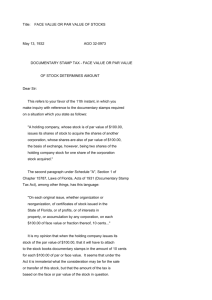
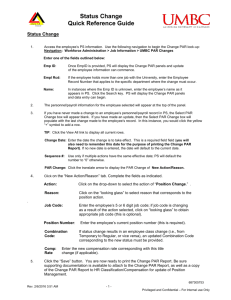
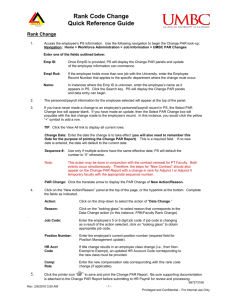
Assignment 4 1.The given transfer function is, G(s) = (2s+1)e−2s (20s+1)(10s+1)(5s+1)(s+1) a) Matlab code for generating the step response, G = tf ([21], [1000, 1350, 385, 36, 1]); G.iodelay = 2; step(G) From the step response plot: t1 = 35.3% of final value = 24 s t2 = 85.3% of final value = 58 s θ = 1.3t1 − 0.29t2 = 14.38s 1 τ = 0.67(t2 − t1 ) = 22.78s The FOPTD model using Krishnaswamy & Sundaresan’s method is given by, G(s) = Ke−θs τ s+1 = e−14.38s 22.78s+1 b) Skogestad’s half rule method FOPTD approximation: 1 θ = 2 + 10 2 + 5 + 1 − 2 = 12.5 10 τ = 20 + 2 = 25 The approximate FOPTD model is given by, G(s) = Ke−θs τ s+1 = e−12.5s 25s+1 SOPTD approximation: θ = 2 + 52 + 1 − 12 = 5 τ1 = 20; τ2 = 10 + 52 = 12.5 The approximate SOPTD model is given by, G(s) = Ke−θs (τ1 s+1)(τ2 s+1) = e−5s (20s+1)(12.5s+1) c) The Matlab code is: function G_ls = modpred(par,data) K = par(1); tau1 = par(2); tau2 = par(3); den = sqrt((1+(tau1*data).^2).*(1+(tau2*data).^2)); G_ls = K./den; end In the command window: G1=zpk([-0.5],[-0.05,-0.1,-0.2,-1],0.002); G1 = 0.002(s+0.5) (s+0.5)(s+0.1)(s+0.2)(s+1) [mag,phase,w] = bode(G_1); par = lsqcurvefit(@(par,data)modpred(par,data),[1 1 1]’,w,squeeze(mag)); G_lsq = tf([par(1)],[par(2)*par(3) par(2)+par(3) 1]); G_lsq.iodelay = 2; Transfer function: G_lsq = 0.9995e−2s 251.4s2 +31.7s+1 2 d) Comparison from the plots: 3 Properties Settling Time Rise Time Delay Time constant Fit G 98.7 53.3 2 38.2 - G_ks 104 50.1 14.38 22.78 Good G_sf 110 54.9 12.5 25 Worse G_ss 102 55.3 5 12.5 Worst 2. a) The SIMULINK block diagram of the process G(s) = ZOH discretization (Ts = 0.5s) G_ls 94.5 53.3 2 36 Best 2e−0.5s (5s+1)(s+2) b) Matlab code for generating pseudo-random binary signal (PRBS): u = idinput(1530,0 prbs0 , [0, 0.15]); 4 with 5 c) y[k] = M X g[n]u[k − n] n=0 6 M = 20 Matlab code: for i = 20+1 : 1530 y_reg(i-20) = y.signals.values(i); for n = 1:21 A(i-20,n) = u(i+1-n); end end g = A\y_reg’; The value of n at which the IR coefficient has a significant value for the first time is the delay. Here d = 2. d) y[k] = a1 y[k − 1] + a2 y[k − 2] + b1 u[k − d − 1] + b2 u[k − d − 2] Matlab code: for k = 5:1530 y_par(k-2-2) = y.signals.values(k); A_par(k-2-2,1) = y.signals.values(k-1); A_par(k-2-2,2) = y.signals.values(k-2); A_par(k-2-2,3) = u(k-3); A_par(k-2-2,4) = u(k-4); end parameters = A_par\y_par; The parameters estimated using least square method: a1 = 0.2954, a2 = 0.3504, b1 = 0.0848and b2 = 0.0982 y[k] = 0.2954y[k − 1] + 0.3504y[k − 2] + 0.0848u[k − 3] + 0.0982u[k − 4] Y (z) = 0.2954z −1 Y (z) + 0.3504z −2 Y (z) + 0.0848z −3 U (z) + 0.0982z −4 U (z) G(z) = Y (z) U (z) = 0.0848z −3 +0.0982z −4 1−0.2954z −1 −0.3504z −2 = 0.0848z+0.0982 z 4 −0.2954z 3 −0.3504z 2 Comparison with the theoretical model, G(z) = sumed model is not close. 3. Ga (s) = Kc τD s+1 ατD s+1 0.0355z+0.02465 z 3 −1.273z 2 +0.3329z , Gi (s) = Kc (τD s + 1) a) For step response: u(t) = A;U (s) = A s Ya (s) = Ga (s).U (s) = Kc A τD s+1 s(ατD s+1) Taking inverse Laplace transform −t ya (t) = Kc A ατD α e −t + Kc A(1 − e ατD ) When α → 0 7 the as- ya (t) = Kc A(δ(t)τD + 1) For ideal response, Yi (s) = Kc AτD + Kc A s Taking inverse Laplace transform yi (t) = Kc A(δ(t)τD + 1) When α → 0 yi (t) = Kc A(δ(t)τD + 1) So, ya (t) = yi (t) as α → 0 For ramp response:u(t) = At;U (s) = A s2 Ya (s) = Ga (s).U (s) = Kc A = Kc AτD h 1 s − ατD ατD s+1 i + Kc A h τD s+1 s2 (ατD s+1) −ατD s + 1 s2 + (ατD )2 ατD s+1 i Taking inverse Laplace transform −t −t ya (t) = Kc AτD (1 − e ατD ) + Kc A(t − ατD (1 − e ατD )) When α → 0 ya (t) = Kc A(τD + t) For ideal response, Yi (s) = Kc AτD s + Kc A s2 Taking inverse Laplace transform yi (t) = Kc A(τD + t) So, ya (t) = yi (t) as α → 0 b) It may be difficult to construct an analog device with this ideal transfer function, it will require to find the exact derivative time τD to use in the device. So it will be difficult to estimate accurately the derivative for use in the ideal transfer function. 8 c) Derivative action is an anticipatory action. It will amplify the noise in the measurement by taking its derivative. The approximate transfer function will reduce this amplification by the approximation. So it is an advantage of not being able to obtain ideal transfer function. 4. G(s) = s2 +4s+8 s(s+1)(s+3) ; a) GOL (s) = H(s) = 1 s+10 ; Gc (s) = Kc Kc (s2 +4s+8) s(s+1)(s+3)(s+10) Poles: 0, −1, P−3, −10 P and Zeros: −2 ± 2i So m-n=2 Centroid= Pi − Zi m−n = −5 Angle of asymptotes= 180+k(360) = 900 , 2700 for k=0,1 m−n Characteristic equation: 1 + Kc GOL (s) = 0 Kc = − s(s+1)(s+3)(s+10) s2 +4s+8 To find break away point dKc ds =0 i.e. s = −0.4969, −6.2868 Matlab code for the Root Locus plot: num =[1 4 8]; den =[1 14 43 30 0]; G = tf (num, den); rltool(G) 9 c)GCL (s) = Kc (s2 +4s+8) s(s+1)(s+3)(s+10)+KC (s2 +4s+8) Poles of s(s + 1)(s + 3)(s + 10) + Kc (s2 + 4s + 8) = 0 by taking Kc = 1 will be at s = −0.4969 ± 0.1128i, −3.1156 and −9.8906 10 At the damping of 0.4 the value of Kc = 27.3 Taking this value, GCL (s) = 27.3s2 +98.2s+196.4 s(s+1)(s+3)(s+10)+27.3(s2 +4s+8) 11 From the Bode plot we can find the relative stability using phase margin. d) For PI controller Gc (s) = Kc (1 + GOL (s) = 1 τI s ) Kc (s2 +4s+8)(1+ τ 1 s ) I s(s+1)(s+3)(s+10) For tuning τI The characteristic equation 1 + GOL = 0 1+ Kc (s2 +4s+8)(1+ τ 1 s ) I s(s+1)(s+3)(s+10) =0 τI = −Kc (s2 +4s+8) s2 (s+1)(s+3)(s+10)+Kc (s2 +4s+8) Kc = −D(s) N (s) D(s) = Kc (s2 + 4s + 8) N (s) = s5 + 14s4 + (Kc + 43)s3 + (30 + 4Kc )s2 + 8Kc (s) GOL (s) = N D(s) The effective open loop transfer function GOL (s) = s5 +14s4 +(Kc +43)s3 +(30+4Kc )s2 +8Kc Kc (s2 +4s+8) 12