Chapter 2 HW II Hints
advertisement

ME 516
Spring 2005
Chapter 2 HW II Tips and Answers
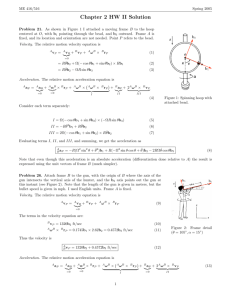
Problem 2.21. I attached a moving frame B to the hoop centered at O, as shown in Figure 1. Frame A is fixed, and
its location and orientation are not needed. The result I obtained is:
A
aP = −R(Ω2 sin2 θ + θ̇2 )b1 + R(−Ω2 sin θ cos θ + θ̈)b2 − (2RΩθ̇ cos θ)b3
b2
b1
Figure 1: Bead and hoop.
Note that even though this acceleration is a absolute acceleration (differentiation done relative to A) the result is
expressed using the unit vectors of frame B (much simpler).
Problem 2.26 Attach frame B to the hunter as shown in Figure 2.
Note that the length of the gun is given in meters, but the bullet speed
is given in mph. I used English units. Frame A is fixed.
Velocity and acceleration of the bullet P (expressed in frame B directions) are:
A
vP = 1320b2 + 0.4572b3 ft/s
A
aP = −0.0798b2 + 460.1b3 ft/s
b3
b2
α = 15◦
2
Again, the velocities are relative to an inertial frame (A) but expressed
along moving frame B axes.
Problem 2.33. From Problem 2.21 we have the acceleration of the
bead relative to a fixed frame, which is just what we need to apply
Newton’s 2nd law. Since there is no friction, the only fores acting are
gravity and normal forces. Perform a force balance in all three frame
B directions. Two of the equations will involve normal forces (and may
be used to compute these forces), the third is the equation of motion,
which is:
g
θ̈ +
− Ω2 cos θ sin θ = 0.
R
Figure 2: Hunter, gun,
and moving frame.
Note: For extra credit pick some numbers and initial conditions and
numerically integrate this equation using MATLAB. If you do this, plot your results. I suspect that depending on the
value of Ω selected you will obtain different behavior.
1
ME 516
Spring 2005
Problem 2.35. In this problem you must find the acceleration of the particle. You are already given a moving frame
xyz (call it frame B with unit vectors b1 , b2 , b3 ) attached to the satellite. This frame may be used to find the
T
is
acceleration, and Newton’s 2nd law subsequently applied. Note that the angular velocity {ω} = ωx ωy ωz
constant, so angular acceleration {α} is zero. Consider frame A fixed.
(b2)
frame B
c2
c1
(b1)
(b3)
Figure 3: Satellite and frame C aligned with the tube.
However, a much “cleaner” and more elegant approach is to consider another relative frame, call it frame C, also
attached to the satellite, but with the c1 axis directly along the tube, as shown in Figure 3. Thus frame C is
simply frame B rotated 30◦ around the b3 axis. The force balance is much easier in frame C. I suggest using
T
A B
ω1 ω2 ω3
to find acceleration A
C{ ω } =
C {a}P , then after you obtain the equation of motion you should
express ω1 , ω2 , and ω3 in terms of the original ωxyz using the appropriate rotation matrix. My result is:
!
√
1 2 3 2
3
c
k
2
− ω − ω +
ωx ωy − ωz s = 0
s̈ + ṡ +
m
m 4 x 4 y
2
Problem 2.36. You must find the latitude of Rio de Janeiro, then find and apply the Coriolis force. I obtained a
leftward Coriolis deflection of 0.138 inch. Not a large amount, but perhaps more than you would expect.
2