Chapter 2 HW II Solution
advertisement

ME 416/516
Spring 2005
Chapter 2 HW II Solution
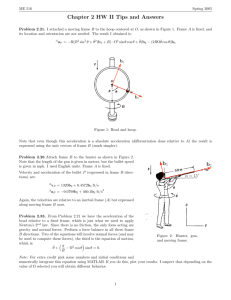
Problem 21. As shown in Figure 1 I attached a moving frame B to the hoop
centered at O, with b1 pointing through the bead, and b3 outward. Frame A is
fixed, and its location and orientation are not needed. Point P refers to the bead.
b2
Velocity. The relative motion velocity equation is
A
vP =
vB + B vP +
|{z}
A
A
ωB ×
B
rP
(1)
=0
= Rθ̇b2 + Ω(− cos θb1 + sin θb2 ) × Rb1
(2)
= Rθ̇b2 − ΩR sin θb3
(3)
Acceleration. The relative motion acceleration equation is
A
aP = A aB + A
αB} × B rP + A ω B × A ω B × B rP + B aP + 2A ω B ×
{z
|
|{z}
{z
|
{z
} |{z} |
=0
=0
II
I
III
B
b1
vP
}
(4)
Figure 1: Spinning hoop with
attached bead.
Consider each term separately:
I = Ω(− cos θb1 + sin θb2 ) × (−ΩR sin θb3 )
(5)
2
II = −Rθ̇ b1 + Rθ̈b2
(6)
III = 2Ω(− cos θb1 + sin θb2 ) × Rθ̇b2
(7)
Evaluating terms I, II, and III, and summing, we get the acceleration as
A
B aP
= −R(Ω2 sin2 θ + θ̇2 )b1 + R(−Ω2 sin θ cos θ + θ̈)b2 − 2RΩθ̇ cos θb3
(8)
Note that even though this acceleration is an absolute acceleration (differentiation done relative to A) the result is
expressed using the unit vectors of frame B (much simpler).
Problem 26. Attach frame B to the gun, with the origin of B where the axis of the
gun intersects the vertical axis of the hunter, and the b2 axis points out the gun at
this instant (see Figure 2). Note that the length of the gun is given in meters, but the
bullet speed is given in mph. I used English units. Frame A is fixed.
b3
b2
◦
α = 15
Velocity. The relative motion velocity equation is
A
vP =
A
vB + B vP +
|{z}
A
ωB ×
B
rP
(9)
=0
The terms in the velocity equation are:
B
A
vP = 1320b2 ft/sec
B
ω ×
B
(10)
rP = 0.1745b1 × 2.62b2 = 0.4572b3 ft/sec
(11)
A
B vP
(12)
Figure 2: Frame detail
(θ = 105◦ , α = 15◦ )
Thus the velocity is
= 1320b2 + 0.4572b3 ft/sec
Acceleration. The relative motion acceleration equation is
A
aP =
A
aB + A
αB} × B rP + A ω B ×
| {z
|{z}
|
=0
A
=0
ωB ×
{z
I
1
B
rP + B aP + 2A ω B ×
{z
} |{z} |
=0
II
B
vP
}
(13)
ME 416/516
Spring 2005
Again consider each term separately:
I = 0.1745b1 × 0.4572b3 = −0.0798b2
II = 2(0.1745)b1 × 1320b2 = 460.1b3
(14)
(15)
Summing terms we get the acceleration of the bullet P (expressed using frame B):
A
B aP
= −0.0798b2 + 460.1b3 ft/s
2
(16)
Problem 33. From Problem 21 we have the acceleration of the bead relative
to a fixed frame, which is just what we need to apply Newton’s 2nd law. Since
there is no friction, the only fores acting are gravity and normal forces. Apply
a force balance in all three frame B directions. Two views of the free-body
diagram are shown in Figure 4. We have
(17)
b1 : −N1 + mg cos θ = −mR Ω2 sin2 θ + θ̇2
b2 : −mg sin θ = mR −Ω2 sin θ cos θ + θ̈
(18)
b3 : N3 = −2mRΩθ̇ cos θ
b2
b3
b1
N3
mg
(19)
From the b2 force balance we get the equation of motion, which after some
rearranging is:
g
θ̈ +
(20)
− Ω2 cos θ sin θ = 0
R
θ
N1
mg
Figure 3: Two views of the freebody diagram.
Extra Credit. Using the equation of motion from (16), I selected the following
values for the parameters: g = 9.81 m/s2 , R = 1 m. Then I used two values for Ω in the MATLAB simulation:
r
g
Ω1 =
R
r
g
Ω2 = 2
R
With an initial position of θ(0) = 1 radian, and θ̇(0) = 0,
the MATLAB simulations are shown in Figure 4. With the
lower value of Ω, the bead drops from its initial position and
oscillates about θ = 0 at a lower frequency. With the higher
value of Ω the bead is held out against the side of the hoop
and oscillates at a higher frequency. This is consistent with
intuition. Science is wonderful!
2
=mA
C aP
(22)
Ω = sqrt(g/R)
Ω = 2*sqrt(g/R)
1.5
θ (radians)
1
Problem 35. Frames B (xyz) and C are both attached to
the satellite, but C is more convenient for finding the equation
of motion. We wish to apply Newton’s 2nd Law to the particle
at P , which is
CF
(21)
0.5
0
−0.5
(23)
−1
0
Both force and acceleration are expressed in frame C, although
acceleration is calculated relative to inertial frame A, as shown
in equation (22) below.
2
4
6
Time (seconds)
8
10
Figure 4: Motion of bead on hoop.
Acceleration. The relative acceleration equation is
A
C aP
=
A
C aO
|{z}
=0
+
B
C aP
|{z}
I
+
A B
Cα
| {z }
=0
×B
C rP +
A B
Cω
|
2
×
A B
Cω
{z
II
×
B
C rP
}
+ 2A
ωB ×
|C
{z
III
B
C vP
}
(24)
ME 416/516
Spring 2005
(b2)
frame B
c2
c1
(b1)
(b3)
Figure 5: Frames for satellite problem.
The angular velocities of the satellite are given by
ωx
ω1
A B
A B
ω
ω2 , which will be computed in equation (31).
ω
=
,
which
is
given,
and
ω
=
y
B
C
ωz
ω3
(25)
The terms of the acceleration expression are:
I = s̈c1
II = s (−ω22 − ω32 )c1 + (ω1 ω2 )c2 + (ω1 ω3 )c3
III = 2ṡ (ω3 c2 − ω2 c3 )
(26)
(27)
(28)
The force on the particle in the c1 direction is
F = (−ks − cṡ)c1
(29)
Applying F = ma in the c1 direction yields the equation of motion as
k
c
2
2
− ω2 + ω3 s = 0
s̈ + ṡ +
m
m
(30)
Now we need to express ω2 and ω3 in terms of ωx , ωy , and ωz . This can be done using a rotation matrix.
Frame C is related to frame B using a 3-rotation matrix by 30◦ , so that
√
3/2 √1/2
ω1
A B
◦ A B
ω
ω
=
[R
(30
)]
ω
=⇒
=
−1/2
3/2
2
3
C
B
ω3
0
0
0
ωx
0 ωy
ωz
1
(31)
From this, we can solve for
(ω22
+
ω32 )
√
3
1 2 3 2
2
ωx ωy
= ωx + ωy + ωz −
4
4
2
(32)
and the final equation of motion is
c
s̈ + ṡ +
m
!
√
k
1 2 3 2
3
2
− ω − ω − ωz +
ωx ωy s = 0
m 4 x 4 y
2
(33)
The rotation of the satellite changes the effective spring constant.
Problem 36. The latitude of Rio de Janeiro is λ = −22.92◦ . The Coriolis “disturbance” force is as follows:
Fd = 2mΩv sin λ = (2)(7.2921 × 10−5 )(20)(−0.3894)m
= (−1.1358 × 10
−3
)m lb
3
(34)
(35)
ME 416/516
Spring 2005
and the deflection is to the left. Applying Fd = mad the acceleration in the lateral direction is
2
ad = −1.1358 × 10−3 ft/sec .
(36)
The time elapsed during the ball’s travel is
d
= 4.5 sec,
v
(37)
1 2
ad t = 0.138 in
2
(38)
t=
hence the amount of deflection of the ball is
d=
4