slides - University of Notre Dame Robotics and Controls
advertisement

Coordination control in a cyberphysical environment1
Claudio De Persis
Groningen Center for Systems and Control
University of Groningen
Workshop on the Control of Cyber-Physical Systems
University of Notre Dame London Centre
October 20-21, 2012
1
Joint work with Paolo Frasca – Politecnico di Torino
1 / 21
Cyberphysical systems
Cyber-physical systems (CPS)
Engineered systems whose operations are monitored, coordinated,
controlled and integrated by a computing and communication core
{z
}
|
(P. Antsaklis)
cyber-infrastructure
Engineered system
Coordination
Cyber infrastructure
=
=
=
Distribution network
Load balancing
measurement scheduling
control computation
actuation scheduling
robustness to delays, quantization
poor clock synchronization
2 / 21
Distribution network
ẋ
z
= Bu
= BT x
where
xi ∈ R, stored quantity at the
node i ∈ I := {1, 2, . . . , n}
uk ∈ R flow through
edge k ∈ E := {1, 2, . . . , m}
B incidence matrix of undirected graph G
Load balancing
Design edge controllers uk , k ∈ E , such that
uk depends on zk := xi − xj
zk → 0 for all k ∈ E
3 / 21
Why (still) studying load balancing?
It is a prototypical problem:
solutions can be extended to more complex scenarios
It is useful in many application fields:
robotic networks
sensors networks
data networks
opinion dynamics
It is well studied:
Theorem (Standard consensus)
If the graph G is connected, the control law uk = −zk guarantees that
lim zk (t) = 0 for all k. Moreover
t→∞
xi (t) →
n
X
xj (0)
j=1
n
4 / 21
Coordination in a cyber-physical environment
The algorithm requires continuous acquisition of information from
neighbors
This is too demanding in a cyber-physical environment!
We instead want a scenario in which
sensors collect information only upon need
the continuous-time systems “naturally” interacts with the
discrete-time information acquisition
the whole system is robust against network uncertainties
(delays, poor synchronization of local clocks, limited data rate
communication, noise)
5 / 21
A hybrid coordination algorithm I
State variables (i ∈ I , k ∈ E )
node quantities: xi ∈ R
flows:
uk ∈ {−1, 0, +1} (ternary controls)
local clock variables: θk ∈ R
Continuous evolution when no information exchange occurs
P
ẋi = k∈E bik uk
u̇k = 0
θ̇k = −1
Jumps occur at every t such that the set
I(θ, t) = {k ∈ E : θk = 0} =
6 ∅
6 / 21
A hybrid coordination algorithm II
Discrete evolution: how the exchange of information affects the systems
xi (t + ) = x(
i (t) ∀i ∈ I
u (t + ) = − signε (zk (t)) if k ∈ I(θ, t)
k
( uk (t) otherwise
α
+ ) = fk (zk (t)) if k ∈ I(θ, t)
θ
(t
k
θk (t) otherwise
(
sign(z)
signε (z) =
0
if |z| ≥ ε
otherwise
ε > 0 is a sensitivity parameter
α ∈ (0, 1) is a robustness parameter
Note: the law uk = − sign(zk ) is known to imply finite-time convergence
7 / 21
A hybrid coordination algorithm III
Next sampling time
(
f α (zk (t)) if k ∈ I(θ, t)
θk (t ) = k
θk (t) otherwise
+
where
α
|zk |
2(degi + degj )
fkα (zk ) =
α
ε
2(degi + degj )
so that
k
dwell time property holds: t`+1
− t`k ≥
if |zk | ≥ ε
otherwise
αε
2 degmax
k ]
sign(zk (t)) constant on [t`k , t`+1
ε-deadzone to prevent Zeno
8 / 21
Hybrid coordination algorithm
1:
2:
3:
4:
5:
6:
7:
8:
9:
10:
11:
12:
13:
Protocol
initialization: for all k ∈ E , set θk (0) = 0, uk (0) ∈ {−1, 0, +1};
for all i ∈ I do
for all k ∈ Ei do
while θk (t) > 0 do
i applies the control bik uk (t);
end while
if θk (t) = 0 then
k polls nodes i, j and collects the information zk (t);
k updates θk (t + ) = fkα (zk (t));
k updates uk (t + ) = signε (zk (t));
end if
end for
end for
9 / 21
Main result
Theorem (Practical balancing)
For every initial condition x̄, let x(t) be the solution to the Hybrid
Coordination Algorithm such that x(0) = x̄.
Then x(t) converges in finite time to a point x ∗ belonging to the set
T
E = {x ∈ Rn : || B
x ||∞ < ε}
|{z}
z
Time cost (time to converge)
T := inf{t ≥ 0 : x(t) ∈ E} ≤
(degmax +1)
||x̄||2
ε
Communication cost (# updates to converge)
C := max max{k : tki ≤ T } ≤
i∈I
4 degmax (degmax +1)
||x̄||2
ε2
10 / 21
Main result
Theorem (Practical balancing)
For every initial condition x̄, let x(t) be the solution to the Hybrid
Coordination Algorithm such that x(0) = x̄. Then x(t) converges in finite
time to a point x ∗ belonging to the set
T
E = {x ∈ Rn : || B
x ||∞ < ε}
|{z}
z
Proof Based on a Lyapunov-like argument for hybrid systems with
V (x) = x T x
It satisfies
V̇ (t) ≤ −
X
k∈E :|zk (t`k )|≥ε
|zk (t`k )|
2
Communication cost (# updates to converge)
11 / 21
Simulations
1
u1
1
data1
data2
data3
data4
data5
0.8
0
−1
1
u2
0.9
0.7
0
−1
1
x
u3
0.6
0.5
0
−1
1
u4
0.4
0
−1
0.3
1
u5
0.2
0
−1
0.1
0
0.05
0.1
0.15
0.2
0.25
Time
0.3
0.35
0.4
0.45
0
0.05
0.1
0.15
0.2
0.25
Time
0.3
0.35
0.4
0.45
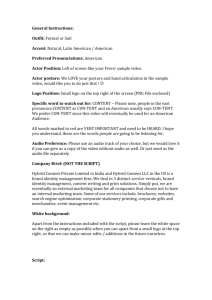
Sample evolutions of states x and corresponding controls u on a ring with
n = 5 nodes, ε = 0.02
12 / 21
Capacity constraints
Ternary controllers satisfy edge capacity constraints
Node capacity constraints can also be satisfied
Proposition
Let
0 ≤ cmin ≤ xi (0) ≤ cmax ,
for all i ∈ I .
where 0 ≤ cmin < cmax are bounds on the capacities of the nodes.
Then the solution x(t) to the Hybrid Coordination Algorithm starting from
x(0) satisfies
0 ≤ cmin ≤ xi (t) ≤ cmax ,
for all i ∈ I ,
for all t ≥ 0.
13 / 21
Asymptotical coordination
14 / 21
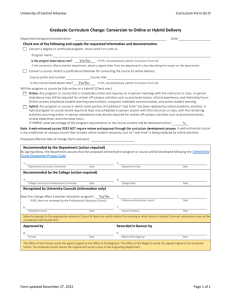
Asymptotical coordination: idea
Accuracy of practical balancing depends on ε
1
1
0.9
0.9
0.8
0.8
0.7
0.7
0.6
0.6
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
0
0
0.1
0.2
0.3
0.4
0.5
Time
0.6
0.7
n = 20, ε = 0.01
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
Time
0.6
0.7
0.8
0.9
1
n = 20, ε = 0.001
Practical convergence may not be satisfactory: can we do better?
15 / 21
Asymptotical coordination: idea
Underlying idea
ε is a measure of the size of the region of convergence
To achieve asymptotical coordination we let ε(t) → 0
To prevent Zeno, we must slow down both the information request
process and the velocity of the systems
Information request
1 α
f (zk )
γ(t) k
in a consistent way, namely
ε(t)
≥c
γ(t)
System velocity
P
γ(t) k∈E bik uk
∀t ≥ 0
16 / 21
Asymptotical coordination: system
Continuous-time dynamics
P
ẋi = γ(t) k∈E bik uk
u̇k = 0
θ̇k = −1
Discrete-time dynamics
xi (t + ) = x(
i (t) ∀i ∈ I
u (t + ) = signε(t) (zk (t)) if k ∈ I(θ, t)
k
u (t) otherwise
( k
1
α
γ(t) fk (zk (t)) if k ∈ I(θ, t)
+) =
θ
(t
k
θk (t) otherwise
17 / 21
Asymptotical coordination: results
Theorem (Asymptotical consensus)
Let x(·) be the solution to the Hybrid Asymptotical Coordination
Algorithm. Then, for every initial condition x̄ ∈Z Rn there exists β ∈ R such
+∞
that lim xi (t) = β for all i ∈ I , if and only if
t→∞
γ(s)ds is divergent
0
R +∞
Condition 0 γ(s)ds = +∞ is necessary because a “persistent
excitement” is needed to ensure convergence
Dwell time property is satisfied
k
t`+1
− t`k ≥
1
α ε(t`k )
k
f
(x(t
))
≥
≥ c0
k
`
k
k
4d
γ(t` )
max γ(t` )
Robustness: no need to have the same γ, ε: we can use different
γk , εk
18 / 21
Simulations
1
0.7
0
−1
1
u2
0.8
u1
1
data1
data2
data3
data4
data5
0.9
0
−1
0.6
u3
x
1
0.5
0
−1
0.4
1
u4
0.3
0
−1
0.2
1
u5
0.1
0
−1
0
0
2
4
6
Time
8
10
12
0
2
4
6
Time
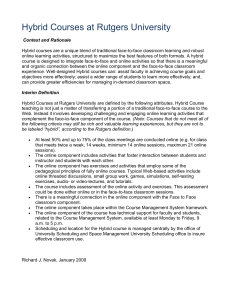
Sample evolutions of x and u on a ring with n = 5, ε(t) =
γ(t) = 0.25
1+t : dwell time is 0.025
8
10
12
0.05
1+t ,
19 / 21
Conclusion
20 / 21
Conclusions
Load balancing in a distribution network
Coarse controllers and occasional information collection
Protocols for practical & asymptotical convergence
Robustness (delays, quantization, clock skews), guaranteed dwell-time
Network of hybrid systems that synchronize asynchronously
C. De Persis and P. Frasca. Robust self-triggered coordination with ternary controllers.
IEEE Transactions on Automatic Control, provisionally accepted. Available at
http://arxiv.org/abs/1205.6917
Work in progress
ẋ
z
= Bu
= BT x
u = −z
ẇ = σ(w )
ẋ = f (x) + Bu + Pw
z = BT x
η̇ = Φ(η, z)
u = Ψ(η, z)
QUantized Information and Control
for formation Keeping (QUICK)
21 / 21