Distributed Control for Cyber Physical Systems -
advertisement

Distributed control for cyber-physical systems II
Claudio De Persis
University of Groningen
joint work with Romain Postoyan (Université de Lorraine and CNRS–CRAN)
ASCI Autumn School on Cyber-physical systems
October 2, 2014
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
1 / 33
Outline
Higher-dimensional multi-agent systems
Cyber-physical Lyapunov function
Event triggered control
Two variations
Self-triggered control
Time-triggered control
Numerical results
Conclusions
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
2 / 33
Higher-dimensional multi-agent systems
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
3 / 33
roblem statement
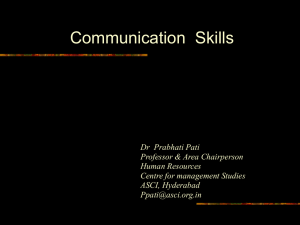
A “higher-dimensional” multi-agent system
ri
Systems in networkdAC,i
yC,i
• Inteconnection
graph G = (I, E )
dAB,i
yB,i
• Node dynamics (i ∈ I)
i
yA,i
ṗi
v̇ii
R
=
=
vi
−vi + ui
xA,i
xB,i
xC,i
Fig. 1. Wheeled robot i
A “higher-dimensional”
multi-agent system
Control objective
0
1
m
=pd j (t)
vhi → 0 as t → ∞
Rendez-vous, 0i.e. piṗ(t)
i m−
d
+I
Ci (pi ) = @
v̇i
mi dAB,i hi
mi d2AB,i +ICM,i
i AB,i i
2
i AB,i
CM,i
A
= 0 −vi +. ui ,
p iposition
e Hamiltonian
) equals the kinetic energy of the
pi , vi ∈ HRir (p
bot and is given
p by
v ∈ R velocity 1
1
2
2
ui ∈ R2 torque = 2mi pi + 2ICM,i hi ,
inaire du
i groupe 1MAC, 4 juin 2014
Hir (pi ) = ppTi (M r ) 1 pi
i ∈ I = {1, 2, . . . , n}
2/36
Romain Postoyan - Université de Lorraine, CNRS (Nancy)
ere Mir = diag (mi , ICM,i ), with robot mass mi and
C. DeICM,i
Persis
Distributed control CPS II
oment of inertia
. (RUG)
ASCI, 2-10-2014
4 / 33
roblem statement
A “higher-dimensional” multi-agent system
ri
Systems in networkdAC,i
yC,i
• Inteconnection
graph G = (I, E )
dAB,i
yB,i
• Node dynamics (i ∈ I)
i
yA,i
ṗi
v̇ii
R
=
=
vi
−vi + ui
xA,i
Fig. 1.
xB,i
xC,i
Wheeled robot i
Rendezvous
Control
objective[Arcak 2007]
0
1
mp
d (t)
For each
initial
i = 1, 2, . . . , n,
Rendez-vous,
→
0 aszit(0),
→∞
i (0),
i (t) −
j hp
0i.e. pcondition
m d
+I
Ci (pi ) = @
mi dAB,i hi
mi d2AB,i +ICM,i
i AB,i i
2
i AB,i
CM,i
0
A.
lim kpi (t) − pj (t)k = 0, ∀i, j
t→+∞
e Hamiltonian Hir (pi ) equals the kinetic
energy of the
bot and is given by
lim kv
inaire du groupe MAC, 4 juin 2014
1
Hir (pi ) = pTi (M r ) 1 pi
2
1 2
1 t→+∞
=
p +
h2 ,
2mi i
2ICM,i i
i (t)k
2/36
= 0, ∀i
Romain Postoyan - Université de Lorraine, CNRS (Nancy)
ere Mir = C.diag
(mi , ICM,i
), with robot mass mDistributed
i and
De Persis
(RUG)
control CPS II
ASCI, 2-10-2014
5 / 33
Formation control
Virtual coupling
System i is interconnected to its neighbors via
arantees
Self-triggered controllers
Simulation results
Conclusions
X
ui =
ψij (zij ),
j∈Ni
with ψ : R → R C 1 , nondecreasing and odd and
zij = pj − pi
Figure: Georg-Johann – wikipedia
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
6 / 33
Energy-based analysis
Multi-agent system + virtual coupling
ṗ1 = v1
v̇1 = −v1 + ψ(p2 − p1 )
ṗ2 = v2
v̇2 = −v2 + ψ(p1 − p2 )
Energy-based (Lyapunov) analysis I
Consider 2 agents (n = 2) evolving on a line (pi , vi ∈ R) and let
q = (z, v ),
with z = p2 − p1
and define [Arcak, TAC 2007]
1
Uphys (q) := (v12 + v22 ) +
2
|
{z
}
kinetic
C. De Persis (RUG)
Distributed control CPS II
Z
z
ψ(s)ds
| 0 {z }
potential
ASCI, 2-10-2014
7 / 33
Energy-based analysis
Energy-based (Lyapunov) analysis II
d
U(q) = = −v12 − v22 + (v1 − v2 )ψ(z) + ψ(z)(v2 − v1 )
dt
= −v12 − v22
Energy is dissipated until system comes to a stop
If v = 0 and z 6= 0 then virtual force ψ(z) kicks in
The system comes to a stop iff z = 0
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
8 / 33
Cyber-physical Lyapunov function
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
9 / 33
Ideal scenario
Continuous measurements
Continuous control updates
E)
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
10 / 33
Idealmeasurements
scenario
nuous
nuousContinuous
control updates
measurements
Continuous control updates
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
11 / 33
Ideal measurements
scenario
nuous
measurements
nuousContinuous
control updates
Continuous control updates
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
12 / 33
imit
the network usage
Cyber-physical
scenario
reduceTosensors
batteries consumption
limit network usage
To reduce
sensor
wear
re control
updates
than
event-triggered control
To reduce actuator wear
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
13 / 33
imit
the network usage
Cyber-physical
scenario
reduceTosensors
batteries consumption
limit network usage
To reduce
sensor
wearevent-triggered control
re control
updates
than
To reduce actuator wear
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
14 / 33
imit
the network usage
Cyber-physical
scenario
reduceTosensors
batteries consumption
limit network usage
To reduce
sensor
wear
re control
updates
than
event-triggered control
To reduce actuator wear
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
15 / 33
t control updates and communication → Self-triggered contr
Problem
statement
limit
the network
usage
reduceTosensors
batteries
limit network
usageconsumption
To reduce
sensor
wear
re control
updates
than
event-triggered control
To reduce actuator wear
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
16 / 33
Problem statement
Communication/computation limitations Agents update their
control and/or take their measurements at t`ij , ` ∈ Z,
ui
=
X
ψij (ẑij )
j∈Ni
where
(
ẑ˙ ij (t)
= 0, t 6= t`ij
ẑij (t + ) = zij , t = t`ij
Problem
For each agent i and each neighbor j ∈ Ni , determine sequence t`ij so
that rendezvous is achieved.
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
17 / 33
Energy-based analysis
Energy function n = 2
1
Uphys (q) := (v12 + v22 ) +
|2 {z
}
kinetic
Energy-based (Lyapunov) analysis
Z
|
z
0
ψ(s)ds
{z }
potential
d
U(q) = = −v12 − v22 + (v1 − v2 )ψ(ẑ) + ψ(z)(v2 − v1 )
dt
6= −v12 − v22
Due to the sampling, energy may not be dissipated
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
18 / 33
Cyber-physical (Lyapunov) energy function
Cyber-physical (Lyapunov) energy function
U(q) := Uphys (q) + Ucyber (q)
where
1
Uphys (q) := (v12 + v22 ) +
2
and
Ucyber (q) :=
1
Z
z
ψ(s)ds
0
2
φ ψ(ẑ) − ψ(z)
2
is the “energy” of the sampling error weighted via φ.
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
19 / 33
Analysis
Lyapunov analysis
d
U(q) = −v12 − v22 + (v1 − v2 )ψ(ẑ) + ψ(z)(v2 − v1 )
dt
2
1 dφ
−
ψ(ẑ) − ψ(z)
2 dt
−φ ψ(ẑ) − ψ(z) ∇ψ(z)(v2 − v1 )
The choice of
dφ
dt
as
dφ
dt
= − σ1 (1 + φ2
dψ
dz
2
)
and a completion of the squares argument yields
d
U(q) ≤ (−1 + 2σ)(v12 + v22 ) ≤ 0.
dt
where σ measures the convergence degradation.
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
20 / 33
Analysis
During continuous evolution
d
U(q) ≤ (−1 + 2σ)(v12 + v22 ) ≤ 0.
dt
At the updates
U(q + )
Z z
1 2
1
2
=
(v + v2 ) +
ψ(s)s + b(ψ(z) − ψ(z))
2 1
2
Z0 z
2
1 2
1
≤
(v1 + v22 ) +
ψ(s)ds + φ ψ(ẑ) − ψ(z)
2
2
0
= U(q).
Energy is dissipated until system comes to a stop
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
21 / 33
Clock
The “weight” φ ∈ [a, b] plays the role of a clock
Clock dynamics
φ̇
φ+
1
= −
σ
= b
1 + φ2
dψ(z)
dz
2 !
φ ∈ [a, b],
φ = a.
where
σ ∈ (0, 12 )
0<a<b
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
22 / 33
Event-based control
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
23 / 33
System with n agents
Dynamics of node i ∈ I
ṗi
v̇i
= vi
P
= −vi +
ψij (ẑij )
j∈Ni
∀j ∈ Ni φij ∈ [aij , bij ]
2
φ̇ij = − σ1ij 1 + (φij )2 ∇ψij (zij )
+
pi = pi
vi+ = vi
z
!
ij
φ
=
a
∃j ∈ Ni φij = aij .
+
ij
ij
ẑij
bij
=
ẑij
φ+
ij
φij > aij
φij
ẑ˙ ij
= 0
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
24 / 33
Event-triggered control
Theorem
1
The solutions to the closed-loop hybrid dynamical system have a
uniform semiglobal dwell-time
2
The maximal solutions are precompact and
3
approach the set
{(p, v , ẑ, φ) : p1 = p2 = . . . = pn , v = 0, ẑ = 0 and φ ∈ [a, b]n }
Precompact solutions
A maximal solution is precompact if it is complete and bounded.
Goebel-Sanfelice-Teel, Hybrid Dynamical Systems, Princeton University Press.
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
25 / 33
Two variations
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
26 / 33
Self-triggered control
To avoid continuous measurement of z in
φ̇
= − σ1 1 + φ2 (∇ψ(z))2
φ ∈ [a, b],
φ+ = b
1
φ=a
One can replace z with its analytical expression
z(t, k) = z(tk , k ) + (1 − e−(t−tk ) )[v2 (tk , k) − v1 (tk , k)
+2ψ(z(tk , k ))] − 2ψ(z(tk , k))(t − tk )
2
solve the ODE and determine the time
T (a, b, p1 (tk , k ) − p2 (tk , k), v1 (tk , k) − v2 (tk , k))
it takes for φ to reach a starting from b.
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
27 / 33
Time-triggered control
To avoid continuous measurement of z in
φ̇
= − σ1 1 + φ2 (∇ψ(z))2
φ ∈ [a, b],
φ+ = b
1
φ=a
One can replace ∇ψ(z) with M where |∇ψ(z)| ≤ M for any z ∈ R
(saturated control)
θ̇ = − σ1 (1 + M 2 θ2 ),
2
θ(0) = b,
solve the ODE and determine the time
T =
σ
(arctan(Mb) − arctan(Ma)).
M
it takes for φ to reach a starting from b.
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
28 / 33
Numerical results
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
29 / 33
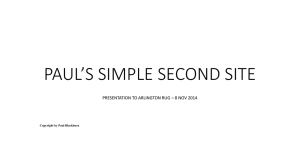
Numerical results
10
[1
5
[1
z
(i) ψ(z) = z
(ii) ψ(z) = arctan(z)
0
[1
−5
0
5
10
15
20
[1
2
100 uniformly distributed
initial conditions
v1 , v2
[1
0
[1
−2
0
5
10
15
t
20
(a, b) = (1, 10)
(a, b) = (0.1, 10)
(a, b) = (0.1, 50)
Fig. 1. Trajectories of z, v1 and v2 (self-triggered control (blue) / time(i)
(ii)
(i)
(ii)
(i)
(ii)
triggered control (green) / crosses indicate triggering instants).
Average # of events
STC
TTC
116
idem
Average t∗
STC
TTC
10.4
idem
73
116
58
idem
36
58
55
idem
9
55
13.4the number
13.0 of events.
16.0 This13.1
> 20
fewer
point is interesting
as these
11.2
idembe used
11.8
idem adapt
13.6
parameters
can
to heuristically
the number of
events
to theI desired performances.
TABLE
OF EVENTS AND AVERAGE VALUE OF t∗ FOR THE SELF - TRIGGERED
(#: NUMBER ,
VIII.CONTROL
C ONCLUSIONS
C. De Persis (RUG)
Distributed
control CPS
II
TTC: TIME
- TRIGGERED
CONTROL
).
[1
[1
[1
[2
STC: SELF - TRIG
ASCI, 2-10-2014
30 / 33
[2
Conclusions
Event-based rendezvous of coupled dynamical systems
Event-triggered (reduce control update)
Self-triggered (reduce measurement frequency)
Time-triggered (reduce computational burden)
Cyber-physical Lyapunov function
Hybrid invariance principle
Details available in
C. De Persis and R. Postoyan. A Lyapunov redesign of coordination
algorithms for cyberphysical systems. http://arxiv.org/abs/1404.0576
Current focus: resilient control to cyber-attacks
C. De Persis and P. Tesi. Input-to-state stabilizing control under
Denial-of-Service. IEEE Transactions on Automatic Control
arXiv:1311.5143
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
31 / 33
Some related literature
1
Distributed cooperative control M. Arcak. Passivity as a design
tool for group coordination. IEEE Transactions on Automatic
Control, 52(8):1380–1390, 2007.
2
Lyapunov redesign D. Carnevale, A.R. Teel, and D. Nešić. A
Lyapunov proof of an improved maximum allowable transfer
interval for networked control systems. IEEE Trans. on Automatic
Control, 52(5):892–897, 2007.
3
Hybrid dynamical systems R. Goebel, R.G. Sanfelice, and A.R.
Teel.Hybrid dynamical systems. Princeton University Press, 2012.
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
32 / 33
Thank you for your attention
C. De Persis (RUG)
Distributed control CPS II
ASCI, 2-10-2014
33 / 33