API Rig Tie Down Study - Final Report - My Committees
advertisement

Loads on Tie-Down Systems for
Drilling Rigs
by
E.G. Ward, Offshore Technology Research Center and
M.H. Kim, Yoon Hyeok Bae, Texas A&M University
Final Project Report
Prepared for the American Petroleum Institute
Under Contract 2007-103129
June 2009
OTRC Library Number: 06/09A197
“The views and conclusions contained in this document are those of the
authors and should not be interpreted as representing the opinions or
policies of the U.S. Government. Mention of trade names or commercial
products does not constitute their endorsement by the U. S. Government”.
For more information contact:
Offshore Technology Research Center
Texas A&M University
1200 Mariner Drive
College Station, Texas 77845-3400
(979) 845-6000
or
Offshore Technology Research Center
The University of Texas at Austin
1 University Station C3700
Austin, Texas 78712-0318
(512) 471-6989
A National Science Foundation Graduated Engineering Research Center
i
Table of Contents
Table of Contents................................................................................................... i
List of Tables and Figures..................................................................................... ii
Introduction ...........................................................................................................1
Objective ...........................................................................................................1
Background .......................................................................................................1
Approach ...........................................................................................................2
Metocean Environment .........................................................................................4
Floating Structure & Motions.................................................................................4
Analysis Model ..................................................................................................4
Structures..........................................................................................................5
Maximum Motion Responses ............................................................................5
Derricks and Substructures...................................................................................6
Rig AA ...............................................................................................................6
Rig AS ...............................................................................................................6
Comparison of Rigs AA and AS ........................................................................7
Wind Loads ...........................................................................................................8
Tie-Down Footing Loads for Derricks and Substructures....................................11
Force Model ....................................................................................................11
Skid Beam Model ............................................................................................13
Footing Loads..................................................................................................15
Footing Load Maxima......................................................................................15
Maximum Footing Loads .................................................................................16
Components of the Maximum Footing Loads for the TLP, Spar, and Semi.....24
Maximum Total Footing Loads for the TLP, Spar, and Semi ...........................26
Design Guidance for Maximum Footing Loads ...................................................30
100-Year Design Loads...................................................................................37
1000-Year “Robustness” or “Survival” Check ..................................................43
Closure............................................................................................................44
Approximations for Determining Maximum Load Components for Providing
Design Guidance ................................................................................................50
Computing Maximum Total Footing Loads Based on Assumed Phasing of
Component Loads...............................................................................................51
Conclusions ........................................................................................................52
100-Yr Design Load ........................................................................................53
1000-Yr Robustness Check Load....................................................................54
Acknowledgements.............................................................................................55
References .........................................................................................................55
Appendix A .........................................................................................................57
ii
List of Tables and Figures
Tables
Table1 Metocean Conditions for the Central Region of the Gulf of Mexico...........4
Table 2 Maximum Accelerations & Inclination Angles...........................................5
Table 3 Rig AA & AS Tie-Down System ...............................................................8
Table 4 TLP AA - Max Loads on Derrick, Derrick + Substructure, and Footings 18
Table 5 Spar AS - Max Loads on Derrick, Derrick + Substructure, & Footings ...19
Table 6 Semi AA - Max Loads on Derrick, Derrick + Substructure, & Footings ..20
Table 7 Impact of Rig AS Position on Footing Loads..........................................30
Table 8 Slope of Sum of Normal Components wrt Simulated Max Loads on
Footings ..............................................................................................................36
Table 9 100-Yr Max (Simul) vs API 4F (1.25 x Sum of 100-Yr Lightship Max
Components .......................................................................................................37
Table 10 1000-Yr Max (Simul) vs Robustness Check (2 x Sum of 100-Yr
Lightship Max Components) ...............................................................................43
Table 11 Comparison of Total Forces & Moments at the Derrick Footing Level for
SparAS Based On Different Assumptions Regarding the Addition of Component
Forces.................................................................................................................52
Figures
Figure 1 Drilling Rig Schematic.............................................................................2
Figure 2 Drilling Rig AA.........................................................................................6
Figure 3 Drilling Rig AS........................................................................................7
Figure 4 3-sec Wind Gust Velocity Profiles for RP = 100, 200, & 1000 Years
(wind reference elevations & deck elevations shown)...........................................9
Figure 5. Wind Speed Time Series .....................................................................11
Figure 6-a Inertial Forces Due To The Motions Of The Floating Structure .........12
Figure 6-b External Forces (Wind & Gravity) ......................................................12
Figure 6-c Total Forces (Inertia, Wind, & Gravity) Applied to Tie-Down Footings
............................................................................................................................13
Figure 7 Skid Beam and Footing Model..............................................................14
Figure 8 Force Nomenclature Convention for Footing Forces ............................14
Figure 9 Simulated Total Footing Forces on Weather and Lee Footings for a
Derrick on a TLP in Horizontal (Surge) & Vertical (Heave) Directions ................15
Figure 10 Force (Reaction) Maxima of the Total and Wind & Inertial Components
of the Footing Loads on the Weather Side of an Example Spar ........................16
Figure 11 TLP AA Max Footing Forces vs Environmental Approach Angles for
RP = 100, 200, & 100 Years ...............................................................................21
Figure 12 Spar AS Max Footing Forces vs Environmental Approach Angles for
RP = 100, 200, & 1000 Years .............................................................................22
iii
Figure 13 Semi AA Max Footing Forces vs Environmental Approach Angles for
RP = 100, 200, & 1000 Years .............................................................................23
Figure14. Force Components at the Time of Max Total Horiz Footing Force for
Different Structures and Drilling Rigs (100-Yr RP, Environ Direction 22.5 deg) ..24
Figure15. Force Components at the Time of Max Total Uplift Footing Force for
Different Structures and Drilling Rigs (100-Yr RP, Environ Direction 22.5 deg) ..25
Figure 16 TLP AA, Spar AS, & Semi AA: Max Derrick & Substructure Footing
Loads (kips) ........................................................................................................26
Figure 17 Spar AS & Spar AA: Max Derrick & Substructure Footing Loads (kips)
............................................................................................................................28
Figure 19 (Max of Wind, Inertia, & Gravity Components) vs Max Simulated
Loads for TLP AA Footings.................................................................................32
Figure 20 (Max of Wind, Inertia, & Gravity Components) vs Max Simulated
Loads for Spar AS Footings................................................................................33
Figure 21 (Max of Wind, Inertia, & Gravity Components) vs Max Simulated
Loads for Semi AA Footings ...............................................................................34
Figure 22 (Max of Wind, Inertia, & Gravity Components) vs Max Simulated
Loads for Spar AA Footings................................................................................35
Table 9 100-Yr Max (Simul) vs API 4F (1.25 x Sum of 100-Yr Lightship Max
Components) ......................................................................................................37
Figure 23 100-Yr Simulated Load vs 100-Yr API Spec 4F Footing Loads for TLP
AA .......................................................................................................................39
Figure 24 100-Yr Simulated Load vs 100 Yr-API Spec 4F Footing Loads for Spar
AS .......................................................................................................................40
Figure 25 100-Yr Simulated Load vs 100-Yr API Spec 4F Footing Loads for Semi
AS .......................................................................................................................41
Figure 26 100-Yr Simulated Load vs 100 Yr-API Spec 4F Footing Load for Spar
AA .......................................................................................................................42
Figure 27 1000-Yr Simulated Load vs Robustness Check Load for TLPAA .......46
Figure 28 1000-Yr Simulated Load vs Robustness Check Load for SparAS ......47
Figure 29 1000-Yr Simulated Load vs Robustness Check Load for Semi AA.....48
Figure 30 1000-Yr Simulated Load vs Robustness Check Load for Spar AA .....49
1
Loads on Tie-Down Systems for Drilling Rigs
An API Sponsored Project Conducted by the
Offshore Technology Research Center
E.G. Ward, M.H. Kim, Yoon Hyeok Bae
Introduction
Objective The objectives of this API sponsored research project were:
(1) to analyze the variation and sensitivity of tie-down loads for drilling rigs and
their substructures on different deepwater floating drilling and production
systems, and (2) develop information that can be used to develop guidance and
recommended practices for designing tie-down systems for drilling rigs on
various types of floating drilling and production systems.
Background During hurricanes Ivan, Katrina, and Ike, several drilling rigs on
floating production systems (FPSs) and Tension Leg Platforms (TLPs) were
moved, and in some instances, even toppled. An initial study of the failures
during hurricane Ivan was funded by the Minerals Managements Service (1-4).
Computer programs were developed and used to estimate the forces on bolted
clamp tie-down systems during hurricane Ivan.
The failure modes of bolted
clamps were studied and modeled. The hurricane loads were compared to the
failure capacities of the clamps in slip, bolt tension, and bolt shear. Results
indicated the sensitivity of clamp loads and failures to structure accelerations as
well as wind loads, and thus the importance of purpose-designed tie-down
systems for the specific structure-drill rig combination and function (derrick/drill
floor tie-down or drilling substructure tie-down systems). Slip was identified as
the most likely failure mode, which was not inconsistent with observations during
Ivan.
2
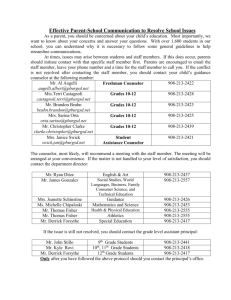
Approach The maximum loads on the tie-down footing were simulated in
hurricane environments. The maximum loads are the sum of wind, inertia due to
accelerations), and gravity loads as seen in the schematic in Figure 1.
Derrick
Gravity
Wind
Footing
Skid
Beam
Substructure
Footing
Deck Movement
& Accelerations
Figure 1 Drilling Rig Schematic
In this API funded study, the MMS study was expanded and extended. The
focus was on the loads on the tie-down footings and not the loads for a specific
tie-down system such as the bolted clamps studied in the MMS project. The
more general approach allows the results to be used in developing guidelines for
designing all types of tie-down systems (e.g., bolted clamps, other types of
mechanical or hydraulic clamps, weldments, mechanical stops or pins, etc.).
Loads on the following structures-drill rig combinations were simulated:
3
TLPAA - a TLP in 3000 ft with a drilling rig AA (representative derrick &
substructure for a TLP)
SparAA - a Spar in 3000 ft with drilling rig AA
SemiAA - Semi in 10,000 ft with drilling rig AA
SparAS - Spar in 3,000 ft with drilling rig AS (representative derrick &
substructure for a Spar)
Each structure and drilling rig combination was analyzed for hurricane wind,
wave, and current conditions that represented 100-year, 200-year, and 1000year return periods as specified in API 2INT-MET (5) for the Central region. The
time varying wind loads for a 3-hour period were simulated based on the API
wind spectra. The time varying global accelerations for the floating structures
were simulated for a 3-hour period using the TAMU-WINPOST model, which has
been verified through numerous comparative studies against model tests and
field measurements.
We had planned to simulate wind loads on the derricks and substructures using
the improved techniques recently benchmarked by the API Spec 4F and 2TD
Task Groups and now included in the new API Spec 4F (6). However we were
unable to obtain sufficiently detailed information on actual rig designs, so we
resorted to using representative drilling rigs and simulated the wind loads from
the available data.
The random time series of the loads on the tie-down footings were computed
from the simulated wind loads and structural accelerations using the coupled
structure and derrick model developed in the MMS study.
Forces on tie-down footings were analyzed to examine the differences due to the
various structure-drilling rig combinations.
A simplified and unified relationship
was established between the maximum simulated loads and the sum of the
maxima of the wind, inertia, and gravity loads. This relationship fits the results
4
for all combinations of floating structures and drilling rigs studied.
That
relationship was then used to develop a simple method to estimate tie-down
footing loads for the 100-year design case and the 1000-year robustness check
case. The relationship seems to be sufficiently robust and tractable to be useful
in providing design guidance for recommended practices.
The study and results are described in the following sections. Additional details
regarding the analysis techniques and the results can be found in Appendix A
and the thesis “Loads on Tie-Down Systems for Floating Drilling Rigs during
Hurricane Conditions)” (7).
Metocean Environment
The metocean environmental conditions used in this study are the wind, wave,
and currents for the Gulf of Mexico Central Region for return periods of 100, 200,
and 1000 years (5). Table 1 presents the wind, wave, and current parameters.
The wind, waves, and currents were assumed to be collinear for simplicity.
Table1 Metocean Conditions for the Central Region of the Gulf of Mexico
Return Period
(Yrs)
Significant Wave
Height (ft)
Wind Speed
(1 hr ave at 32.6 ft elev)
Surface Current
(ft/sec)
100
51.8
157.5
7.9
200
54.1
167.3
8.4
1000
65.0
196.9
9.8
Floating Structure & Motions
Analysis Model The global motions of the floating structures were analyzed
using the time-domain fully coupled dynamic analysis tool CHARM3D (8).
Hydrodynamic coefficients such as added mass and radiation/diffraction damping
needed in CHARM3D were simulated using WAMIT (9). The 6 degree-offreedom motions (displacements, angles, and accelerations) were simulated for 3
5
hours in the 100, 200, and 1000 year environments.
See Reference 7 and
Appendix A for more details
Structures The structures analyzed in this study were not actual designs, but
represented realistic examples of three different Floating Production Systems
(FPS) - a TLP, a Spar, and a Semisubmersible.
The TLP and Spar were
originally developed for studies sponsored by DeepStar (10). The Semi was
developed by Aker and furnished by BP (11). The structural configurations and
particulars are given in Appendix A. The TLP and Spar were analyzed in 3000 ft
water. The Semisubmersible was a deep-draft design with top-tensioned risers,
and was analyzed in 10,000 ft water.
Maximum Motion Responses The maximum responses for the three
structures are shown in Table 2 for the 100 Yr metocean conditions.
For
simplicity, the wind, waves, and currents directions are collinear and are at an
angle of 45 degrees. The values shown are the individual maxima during the
10800 second or 3 hour simulations. Critical motion maxima are shown in Table
2.
Table 2 Maximum Accelerations & Inclination Angles
Return
Period
(years)
Horizontal Accel at
Derrick CG (percent g)
Vertical Accel at Derrick
CG (percent g)
Inclination Angle
(degree)
TLP
SPAR
SEMI
TLP
SPAR
SEMI
TLP
SPAR
SEMI
100
0.20
0.43
0.25
0.03
0.03
0.10
0.60
10.88
10.27
200
0.21
0.46
0.27
0.03
0.04
0.11
0.67
11.79
11.49
1000
0.24
0.57
0.36
0.04
0.07
0.14
0.90
15.88
17.17
These structure responses result in the inertial and gravity components of the
loads on the derrick and substructure and the tie-down.
The responses are
quite different for the three structures in the same metocean conditions.
It
follows then and will be shown later that tie-down loads for a derrick and its
substructure in the same environment but on different floating structures can be
significantly different.
6
Derricks and Substructures
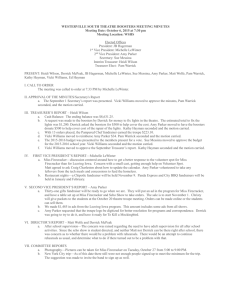
Two derricks and associated substructures were analyzed in the study.
Rig AA Rig AA represents a derrick and substructure for a TLP or a Semi using
top-tensioned risers. Configurations of the derrick and substructure are shown in
Figure 2.
+245
'
upper derrick
+160'
weight of
derrick +
drill floor +
substructure
= 1800 k
lower derrick
drill floor
+60'
deck at 0'
substructure
weight
skid base
= 600 k
CG (derrick + drill
floor + substructure)
is + 95 ft above skid
base
+75'
+10'
skid base
deck = 0’
CG (skid base) =
+5 ft above deck
35 ft
90 ft
Figure 2 Drilling Rig AA
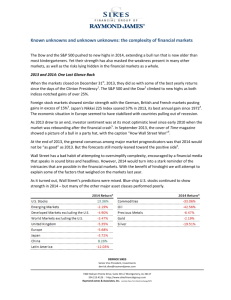
Rig AS Rig AS represents a derrick and substructure that might more likely be
used on a Spar. Some of the drilling equipment and tanks are included in the
substructure which results in a heavier and larger substructure. Configurations of
the derrick and substructure are shown in Figure 3.
7
+225'
upper derrick
weight of
derrick +
drill floor
= 1500 k
+140'
CG (derrick +
drill floor) =
120 ft above
deck
lower derrick
+55'
+40'
weight of
substructure
=2000 k
drill floor
CG
substructure
= +20 ft
above deck
substructure
skid beam on deck
deck at 0'
50 ft
100 ft
Figure 3 Drilling Rig AS
Comparison of Rigs AA and AS The two derricks above the drill floor are
identical. The differences in the two rigs is in the locations of the upper tie-down
elevations (referred to as the “derrick” tie-down system) and the lower tie-down
system (referred to here as the “substructure” tie-down system.
The substructure for Rig AA contains no equipment and is a relatively light weight
structure whose primary function is to elevate the drill floor above the deck. The
substructure is fixed to the drill floor. The substructure for Rig AS is not fixed to
the drill floor, and contains drilling equipment and is thus a heavier structure than
that for Rig AA. The elevations of the tie-down systems and the weights above
each tie-down level is shown in Table 3.
8
Table 3 Rig AA & AS Tie-Down System
Rig AA
Derrick Tie-Down
Elev. above deck
10 ft
Weight above tie-down
1800 kips
Wind area (normal) above tie-down
9030 ft2
Substructure Tie-Down
Elev. above deck
0 ft
Weight above tie-down
2400 kips
Wind area (normal) above tie-down
9430 ft2
Rig AS
40 ft
1500 kips
6530 ft2
0 ft
3500 kips
8530 ft2
Note that the wind area above the derrick tie-down for Rig AA is about 50%
larger than that for Rig AS. The weight above the substructure tie-down for Rig
AA is about 70% smaller than for Rig AS. These differences impact the tie-down
footing loads.
Wind Loads
The wind loads on the derrick and substructures were calculated following the
guidance provided in the recently revised API 4F (6).
Key features of that
revision are; (1) the wind velocity is computed as a function of elevation prior to
computing the force which is proportional to the velocity squared, and (2) the
areas are computed as the projected area normal to the wind direction.
The derricks and substructures used in this study are described below, and are
not actual designs but are representative of realistic examples of drilling rigs
used on floating production systems.
From API Spec 4F (6), the force on an individual member is
F (z) = 0.00338*Ki*Vz2 *Cs*A*Gf*Ksh
where
Ki = angle of member inclination.
Cs = Shape Coefficient
Gf = Gust Factor
Ksh = Shielding Factor
9
Vz = V des * β (z)
V des = 3-sec reference velocity at 32.8 ft for an N-year return period
β (z) = elevation factor at z referenced to z = 32.8 ft
The total force on the derrick or substructure is the sum of all member forces.
The wind speed variation with elevation is shown in Figure 4. The reference
elevation used in specifying winds is 32.8 ft as indicated.
450
100-year
200-Year
1000-Year
Elevation above MWL (ft)
400
350
300
250
TLP Deck
(205 ft)
200
150
Spar & Semi
Deck (140 ft)
100
50
reference elevation
0
0
100
200
300
400
500
3-sec Gust Velocity (fps)
Figure 4 3-sec Wind Gust Velocity Profiles for RP = 100, 200, & 1000 Years
(wind reference elevations & deck elevations shown)
We were unable to obtain detailed descriptions of an actual derrick and
substructures at the member level. We approximated the total wind forces as the
force on each major component (upper derrick, lower derrick, drill floor,
substructure, skid base, etc - e.g. see Figures 2 and 3) by
P = ½ Vcop2 C shape C perm A projected
(1)
where
V
cop
= Vz (z = cop) is the velocity at the center of pressures of the
component
10
C shape = shape factor for the component
C perm = permeability factor for the component
A
projected
= projected area of the component from a specified
direction (directions of 0, 22.5, 45 and 90 degrees were used in this
study).
Values for these parameters for each of the components for drilling rigs AA and
AS are given in Appendix A.
Total wind force P and moment M on the derrick and substructure can then
calculated as the sum of the values on the various elements for a given velocity
V des and direction. We can then calculate elevation of the center of pressure for
the complete derrick or substructure as
cop = M/P
and the term
B = P/ Vcop2 A projected
(2)
For the purposes of this study we need to simulate the time history of the wind
forces and moments on the derrick and substructure. Writing the time dependent
velocity at elevation z as V (z, t), we can rewrite equations (1) and (2) to
recognize the time dependences
P (,t) = B x [V(cop, t)] 2 x A projected ()
(3)
M (,t) = cop x P(,t)
(4)
where
A() = is the projected area of the derrick or substructure
perpendicular to the wind direction
B() represents ½ C
shape
C
perm
for the derrick or substructure
area perpendicular to the wind direction
cop () = the elevation z at the center of pressure for the derrick or
substructure for a given wind direction .
11
Wind forces and moment time histories 3 hours long (10,800 sec) were simulated
using a 0.5-second time step and the API wind spectra (5) for angles of 0, 22.5,
45, and 90 degrees. See Appendix A for more details.
A sample wind speed time series is shown in Figure 5.
Velocity (ft/sec)
300
250
200
150
100
0
2000
4000
6000
8000
10000
12000
Time (sec)
Figure 5. Wind Speed Time Series
Tie-Down Footing Loads for Derricks and Substructures
Force Model The model for applying all the loads to determine the tie down
loads is shown in Figure 6 a-c. The figure is simplified in that the derrick and
substructure are shown as a single body that is tied down to the deck at supports
represented by the triangles.
The three figures show the inertial forces, the
external forces (wind and gravity), and the total forces and moments as applied
to the tie-down footings in the body coordinate system. Forces are shown in both
the Global Coordinates and the Body- Fixed Coordinates. All footing loads will
be reported in the Body-Fixed Coordinate System, using the following
convention:
x (surge)
y (sway)
z (heave)
12
Normal Force
m( ( l))
Tangential Force
m ( l )
Lateral Force
mx
CG
Angular
Momentum
I
l
CG
x
Body Fixed
Coordinate
Global
Coordinate
Figure 6-a Inertial Forces Due To The Motions Of The Floating Structure
Fwind
CP
CG
CP
Fgravity
CG
l
Global
Coordinate
x
Body Fixed
Coordinate
Figure 6-b External Forces (Wind & Gravity)
13
Wind
Wind
CP
CP
Inertia
Inertia
Gravity
CG
rp
CG
rg
Gravity
Tie-Down
Footings
Total Force (X direction) = Fx
Total Force (Y direction) = Fy
Total Moment =
I rg Finertia rg Fgravity rp Fwind
Figure 6-c Total Forces (Inertia, Wind, & Gravity) Applied to Tie-Down Footings
The time series for the inertia, wind, and gravity are simulated and summed as
indicated the get the time series of the total forces on the tie-down footings,
Skid Beam Model The rig and superstructure models are attached to the
floating structures deck with a skid beam model to represent the capability to skid
the drilling derrick in the x and y directions to get over different wells.
The skid
beam model is shown in Figure 7. Note that there are four footings at each of
two levels. These footings are the contact areas between the structure above
(either the derrick or the derrick and superstructure) and the skid beam on which
the structure rests.
The tie-down system (e.g., bolted or hydraulic clamps,
temporary weldments, etc) fixes the structure above to the skid beam and must
resist the inertial, wind, and gravity loads applied at these footings.
The time-series of the x, y, and z components of the loads on each of the eight
footings was simulated for the various 100, 200, and 1000 year return period
environments approaching the structure from 0, 45, and 90 degrees. Some 22.5
degree cases were also simulated.
14
Y
45°
Substructure
Footings
Derrick
Footings
X
y
Z
Skid Beams
Derrick
x
Figure 7 Skid Beam and Footing Model
We adopted the nomenclature that the longitudinal force described the load
parallel to the skid beam (whether it was in the x direction as for the substructure
skid beam or the y direction as would be the case for the derrick skid beam).
Similarly, the load perpendicular to a skid beam is referred to as the lateral load.
The load in the z direction was always referred to as the uplift force. This
convention is shown in Figure 8.
Uplift Force
Footing
Lateral Force
Longitudinal
Force
Skid Beam
Figure 8 Force Nomenclature Convention for Footing Forces
15
Footing Loads An example of the simulated derrick footing loads for a TLP is
shown in Figure 9.
Surge Reaction Force 1 & 3 (kips)
Surge Reaction Force1 & 3 (kips)
0
0
-50
-50
-100
-100
-150
-150
y
-200
-200
4
-250
0
2
4
6
8
10
Time (1000 sec)
3
12
500
6
4
8 10
Time (1000 sec)
2
0
12
x
Force
Heave Reaction Force 2 & 4 (kips)
-250
2
1
Heave Reaction 2 & 4 Force (kips)
2000
1500
0
1000
x
- 500
500
-1000
0
2
4
6
8
10
Time (1000 sec)
12
0
0
2
8
10
4
6
Time (1000 sec)
12
Figure 9 Simulated Total Footing Forces on Weather and Lee Footings for a Derrick on a
TLP in Horizontal (Surge) & Vertical (Heave) Directions
Footing Load Maxima In Figure 10, the time-series of the total footing loads
for a Spar example is shown, and the maximum horizontal and vertical loads on
the weather footings are identified. Also shown are the times and values for the
wind and inertial component maxima to illustrate that the maximum total load and
the maxima of the component loads do not occur at the same time. The time
domain simulation approach discussed above and used in this study preserves
the phasing between the component loads and allows accurate determination of
the maximum total forces.
16
Horizontal
Force (kips)
Max Reaction
= - 299 kips
Max Inertia
Component
(-137 kips)
Max Wind
Component
(-182 kips)
200
0
-200
-400
0
2
4
6
8
10
12
Time (1000 sec)
Max Inertia
Component
(779 kips)
Max Wind
Component
(- 1084 kips)
Max. Reaction
= - 1341 kips
Vertical
Force (kips)
1000
0
-1000
-2000
0
2
4
6
8
10
12
Time (1000 sec)
Figure 10 Force (Reaction) Maxima of the Total and Wind & Inertial Components of the
Footing Loads on the Weather Side of an Example Spar
Maximum Footing Loads The maximum derrick and substructure footing
loads in the 3 hour simulations for the 100, 200, and 1000-year conditions are
shown in Tables 4- 6 for the TLPAA, SparAS, and SemiAA.
The maximum footing forces shown are the largest total footing force in the
longitudinal, lateral, or uplift direction experienced at any of the four footings at
both the derrick and substructure level. Note that the maxima in the longitudinal,
lateral, and uplift directions do not generally occur at the same time or even on
the same footing.
17
For completeness, the maximum forces and moments on the derrick and derrick
and substructure are also shown.
The moments are taken about levels of the
derrick footing or the substructure footings.
These maximum footing loads for the TLP, Spar, and Semi are also shown in the
polar plots in Figures 11 - 13. Each polar plot shows the maximum footing force
versus the direction of the environmental load. Forces for the 100, 200, and
1000 year return period environments are presented.
The upper three plots
present the maximum longitudinal, lateral, and uplift forces at the derrick footing
level. Similarly, the lower three plots present the maximum lateral, longitudinal,
and uplift forces at the substructure footing level. (The longitudinal and lateral
directions are reversed because the substructure skid beams are perpendicular
to the derrick skid beams.)
Some general observations for the TLP, Spar, and Semi results include:
The wind forces on the derrick and the derrick + the substructure unit are
largest for when the wind is from 45 degrees because the projected areas
are largest in that direction for the derrick and substructure configuration
used in the study.
The maximum longitudinal footing forces are largest when the metocean
environmental approach angle is within 0 - 22.5 degrees of being parallel
to the skid beam.
Similarly, the lateral load is largest when the
environmental approach angle is within 0 -22.5 degrees of being
perpendicular to the skid beam. This is due to the combination of the
projected wind area and structural motion responses.
The maximum uplift footing forces are generally largest when the
metocean environment is from 22.5 - 45 degrees.
This is due to the
combination of several factors - the projected wind area, the moment arms
for the footings, and the structural motion responses.
18
Derrick
Derrick +
Skid
Base
Table 4 TLP AA - Max Loads on Derrick, Derrick + Substructure, and Footings
Return Metocean
Time Domain Simulation
Period Direction
Max Loads
Max Footing Loads
Horiz Force
Moment
Longitudinal (X)
Lateral (Y)
100
0
869
88163
218
2
200
0
977
99153
245
1
1000
0
1368
138272
343
1
100
22.5
1043
107203
249
121
200
22.5
1167
120148
281
129
1000
22.5
1633
168832
389
166
100
45
1122
115188
198
198
200
45
1279
131887
226
226
1000
45
1773
182467
314
313
100
90
869
88165
2
218
200
90
977
99154
1
245
1000
90
1368
138272
2
343
100
200
1000
100
200
1000
100
200
1000
100
200
1000
0
0
0
22.5
22.5
22.5
45
45
45
90
90
90
Max Loads
Horiz Force
Moment
1070
97512
1194
109683
1666
153001
1215
118990
1371
133159
1906
187101
1304
127605
1473
146117
2041
201781
1014
97560
1122
109822
1559
153217
Lateral (X)
268
299
418
296
334
461
231
260
361
2
2
2
Max Footing Loads
Longitudinal (Y)
1
1
1
129
139
185
231
260
361
254
281
390
Uplift
815
972
1525
1541
1786
2658
1881
2222
3249
817
974
1527
Uplift
804
977
1587
1235
1454
2288
1201
1465
2253
0
28
261
19
Derrick
Derrick +
Skid
Base
Table 5 Spar AS - Max Loads on Derrick, Derrick + Substructure, & Footings
Return Metocean
Time Domain Simulation
Period Direction
Max Loads
Max Footing Loads
Horiz Force
Moment
Longitudinal (X)
Lateral (Y)
100
0
958
87560
241
2
200
0
1040
95623
262
2
1000
0
1345
123282
338
2
100
22.5
1078
100823
252
98
200
22.5
1183
111029
277
107
1000
22.5
1530
145369
358
138
100
45
1126
106795
200
198
200
45
1240
118006
220
218
1000
45
1612
155215
287
283
100
90
958
87563
2
241
200
90
1040
95626
3
262
3
338
1000
90
1345
123283
100
200
1000
100
200
1000
100
200
1000
100
200
1000
0
0
0
22.5
22.5
22.5
45
45
45
90
90
90
Max Loads
Horiz Force
Moment
2037
155772
2210
169953
2869
219250
2200
177344
2408
195067
3106
253622
2228
185403
2439
204011
3145
266263
1861
147988
2011
161049
2573
208510
Max Footing Loads
Lateral (X)
Longitudinal (Y)
516
4
559
4
726
5
517
200
566
218
730
279
395
392
433
429
561
550
10
470
10
508
12
648
Uplift
539
626
936
963
1102
1568
1165
1333
1883
540
627
937
Uplift
758
913
1477
1161
1374
2071
1154
1369
2078
-43
33
340
20
Table 6 Semi AA - Max Loads on Derrick, Derrick + Substructure, & Footings
Return
Direction
Time Domain Simulation
Period
Derrick
Derrick
+ Skid
Base
100
200
1000
100
200
1000
100
200
1000
100
200
1000
100
200
1000
100
200
1000
100
200
1000
100
200
1000
0
0
0
22.5
22.5
22.5
45
45
45
90
90
90
0
0
0
22.5
22.5
22.5
45
45
45
90
90
90
Max Loads
Horiz Force
Moment
666
63131
761
72287
1098
104246
774
75316
881
86120
1250
122501
842
81682
951
92312
1394
134498
666
63131
761
72287
1098
104246
Max Loads
Horiz Force
Moment
1429
1626
2375
1569
1787
2545
1639
1848
2727
1225
1393
2001
114505
131013
189721
129669
148175
210368
135583
152609
222267
95048
108583
156428
Max Footing Loads
Longitudinal (X)
Lateral (Y)
219
4
251
5
363
5
254
113
288
126
409
169
199
197
226
224
333
325
5
218
5
248
6
361
Max Footing Loads
Lateral (X)
Longitudinal (Y)
269
308
445
302
341
486
234
265
393
7
7
8
2
2
3
120
135
192
232
263
384
251
286
418
Uplift
876
1068
1766
1542
1826
2837
1936
2251
3531
876
1068
1766
Uplift
899
1117
1902
1277
1540
2475
1283
1534
2555
25
116
444
21
TLP AA Max Derrick Footing Longitudinal Forces
TLP AA Max Derrick Footing Lateral Forces
0
400
TLP AA Max Derrick Footing Uplift Forces
0
400
22.5
300
45
0
300
200
4000
22.5
3000
45
200
67.5
100
90
0
45
2000
67.5
100
22.5
67.5
1000
90
0
90
0
100 Yr
100 Yr
100 Yr
200 Yr
200 Yr
200 Yr
1000 Yr
1000 Yr
1000 Yr
TLP AA Max Substructure Footing Lateral Forces
TLP AA Max Subtructure Footing Longitudinal
Forces
TLP AA Max Substructure Footing Uplift Forces
0
600
22.5
400
0
0
500
600
45
500
400
300
67.5
200
4000
22.5
90
0
3000
45
200 Yr
1000 Yr
67.5
67.5
1000
100
90
0
100 Yr
45
2000
300
200
100
22.5
90
0
100 Yr
200 Yr
1000 Yr
Figure 11 TLP AA Max Footing Forces vs Environmental Approach Angles for RP = 100, 200, & 100 Years
100 Yr
200 Yr
1000 Yr
22
Spar AS: Max Derrick Footing Longitudinal Forces
Spar AS: Max Derrick Footing Lateral Forces
0
Spar AS: Max Derrick Footing Uplift Forces
0
0
400
400
22.5
300
3000
22.5
300
45
200
45
22.5
45
2000
200
67.5
100
67.5
1000
90
0
67.5
100
90
0
0
100 Yr
200 Yr
1000 Yr
100 Yr
100 Yr
200 Yr
200 Yr
1000 Yr
1000 Yr
Spar AS: Max Sustructure Footing Longitudinal
Forces
Spar AS: Max Substructure Footing Lateral
Forces
90
Spar AS: Max Substructure Footing Uplift Forces
0
0
800
700
600
500
400
300
200
100
0
4000
0
22.5
45
67.5
90
800
700
600
500
400
300
200
100
0
22.5
22.5
3000
45
45
2000
67.5
67.5
90
1000
0
90
100 Yr
100 Yr
200 Yr
1000 Yr
100 Yr
200 Yr
200 Yr
1000 Yr
Figure 12 Spar AS Max Footing Forces vs Environmental Approach Angles for RP = 100, 200, & 1000 Years
1000 Yr
23
Semi AA M ax Derrick Footing Longitudinal
Forces
Semi AA Max Derrick Footing Uplift Forces
Semi AA Max Derrick Footing La tera l Forces
0
0
500
400
0
4000
22.5
22.5
300
400
45
45
300
3000
200
200
67.5
67.5
100
90
0
2000
67.5
90
100 Yr
100 Yr
200 Yr
200 Yr
1000 Yr
1000 Yr
Semi AA: Max Substructure Footing Lateral
90
0
100 Yr
200 Yr
Semi AA: Max Substructure Footing Longitudinal Forces
1000 Yr
Semi AA: Max Substructure Footing Uplift
0
0
60
45
1000
100
0
22.5
4000
0
22.
600
50
22.5
22.5
3000
500
4
40
45
45
400
2000
30
67.
20
300
67.5
67.5
200
1000
10
100
9
0
90
0
90
0
100
100 Yr
100 Yr
200
200 Yr
200 Yr
1000
1000 Yr
1000 Yr
Figure 13 Semi AA Max Footing Forces vs Environmental Approach Angles for RP = 100, 200, & 1000 Years
24
Components of the Maximum Footing Loads for the TLP, Spar, and Semi To
illustrate the contributions of the various force components to the maximum load, the
wind, inertia, and gravity force components on the indicated footings at the time of total
maximum load are shown in Figures 14 and 15. The environment direction is 22.5
2500
2000
1500
Gravity
Inertia
Wind
1000
500
a
TLP AA
Spar AS
Spar AA
Substructure
Derrick
Substructure
Derrick
Substructure
Derrick
Substructure
0
Derrick
Max Horizontal Footing Force (kips)
degrees.
Semi AA
Figure14. Force Components at the Time of Max Total Horiz Footing Force for Different Structures
and Drilling Rigs (100-Yr RP, Environ Direction 22.5 deg)
Figure 14 shows the horizontal force on the indicated derrick and substructure footings
in the x-direction on the windward corner. The wind load is the largest single component
in each case. The inertia component is larger for the spars due to their larger pitch and
25
roll accelerations. The gravity loads are larger for the spars and semi due to their larger
pitch and roll angles.
Similarly, Figure 15 shows the maximum uplift forces on the indicated footings. Again,
2500
Max Uplift Force (kips)
2000
1500
Gravity
1000
Inertia
500
Wind
0
-500
TLP AA
Spar AS
Spar AA
Substructure
Derrick
Substructure
Derrick
Substructure
Derrick
Substructure
Derrick
-1000
Semi AA
Figure15. Force Components at the Time of Max Total Uplift Footing Force for Different
Structures and Drilling Rigs (100-Yr RP, Environ Direction 22.5 deg)
26
the wind load is the largest component. The inertia components are again largest for
the Spars. (Note that the stacked presentation of the components does not provide a
total load since uplift force included both positive and negative components.)
These conclusions are consistent with the maximum accelerations & Inclination angles
previously shown in Table 2.
Maximum Total Footing Loads for the TLP, Spar, and Semi The maximum total
derrick & substructure footing loads for the TLP, Spar, and Semi are compared in Figure
16. Both horizontal loads are shown. Note that the load maxima refer to the maxima at
any of the four footings at each level.
Results are consist with the components loads
as discussed and illustrate above.
Substructure Footing
Derrick Footing
3000
3000
2500
2500
2000
2000
1500
1500
1000
1000
500
500
0
0
Longitudinal
Lateral
TLP AA
Uplift
Longitudinal
Spar AS
Lateral
Uplift
Semi AA
Figure 16 TLP AA, Spar AS, & Semi AA: Max Derrick & Substructure Footing Loads (kips)
At the derrick footing level, the longitudinal and lateral loads are about equal for the
TLPAA and SemiAA since both have the same drilling rig and similar horizontal
accelerations.
The longitudinal and lateral footing loads for the Spar AS are also about
27
equal despite the larger horizontal deck accelerations (pitch and roll) which are offset by
the lighter weight of the drilling rig the smaller wind loads above the derrick tie-down
level. The wind area (and force) above the derrick tie-down level for Rig AS structure
on the Spar is about 2/3 of that for Rig AA on the TLP and Spar, and the moment arm
for the wind loads is also greater for Rig AA.
These differences explain why the uplift
load for the Spar is lower even though its horizontal acceleration is about twice that of
the TLP and Semi.
At the substructure footing level, the wind area (and forces) is about equal. The larger
horizontal acceleration and the heavier weight of Rig AS above the substructure tiedown level causes the longitudinal and lateral footing loads to be larger than those for
the TLP and Semi.
The heavier weight of Rig AS also causes the uplift footing loads
to be about equal with those for the TLP and Semi.
In Figure 17, an additional case was analyzed to illustrate the impact of a different rig on
maximum footing loads. Rig AS on the Spar was replaced by Rig AA, and the analysis
was repeated. At the derrick footing level, the longitudinal and lateral loads for the Spar
AA are larger than Spar AS primarily due to the larger wind area (and loads) and, to a
lesser extent, the larger weight of the structure above the derrick tie-down level. The
maximum uplift load is much larger for Spar AA due to the larger wind load and moment
arm above the derrick footing level, the smaller horizontal moment arm (35 ft for Rig AA
vs 50 ft for Rig AS), and larger weight (inertial and gravity load components).
28
Derrick Footing
Substructure Footing
3000
3000
2500
2500
2000
2000
1500
1500
1000
1000
500
500
0
Longitudinal
Lateral
Uplift
Spar AS
0
Longitudinal
Lateral
Uplift
Spar AA
Figure 17 Spar AS & Spar AA: Max Derrick & Substructure Footing Loads (kips)
At the substructure footing level, the wind loads for Rig AA and AS are more equal. The
larger weight of Rig AS causes the longitudinal and lateral footing loads to be larger
than for Rig AA. The maximum uplift footing load for Rig AA is again larger than for Rig
AS, but by a lesser amount because of the heavier substructure for the Rig the Rig AS.
The results presented and discussed above illustrate that the maximum footing loads for
use in designing tie-down systems are dependent on the
motion characteristics of the structure
the area, weight, and geometric configuration of the drilling rig’s derrick and
substructure
the elevations of the derrick (upper) and substructure (lower ) tie-down footing
levels.
29
Sensitivity of Maximum Footing Loads to Derrick Position
A brief investigation of the sensitivity of tie down loads to derrick position was completed
using Spar AS.
The design
Longitudinal
position was assumed to be at 0,
0. The layout is shown in Figure
Lateral
Y
90
18. The beams that support the
X
derrick were treated as simple
22.5
beams to provide an estimate of
0
the impact of the flexibility of the
beams on the footing loads (see
Appendix
A).
The
beams
supporting the substructure were
assumed to be fixed to the deck
and infinitely stiff.
The derrick was positioned at the
X,Y positions shown, and the
maximum
footing
determined
environment
for
loads
the
from
directions shown.
were
100-year
the
three
The center
position was taken to be 0,0, and
the rig moves were +/- 27.5 ft in
the X and/or Y directions.
The results are summarized in
Table 7. The percentage of the
Figure 18 Position Variations for Rig AS
increase in the maximum footing
load over that for the 0,0 position is shown for each rig position.
The maximum
longitudinal footing load is 140% of the maximum in the 0.0 position, and occurred when
derrick was moved to either extreme offset of the derrick skid beams, i.e., Y positions of
30
+ or - 27.5 feet (movements in either direction). The direction of the environment was
22.5 degrees. The maximum lateral footing load remained at 100 percent of the 0,0
load and was not affected by rig movement. The direction of the environment was 90
degrees.
The maximum uplift footing load is 114% of the maximum at 0, 0 and
occurred when the derrick was moved to the extreme offset of the derrick skid beams
on the lee side, i.e. Y position of + 27.5 feet with the direction of the environment of 90
degrees.
Table 7 Impact of Rig AS Position on Footing Loads
Rig Position
Max Footing Loads
X
0
all
all
all
Y
0
+/- 27.5
all
27.5
X Long
100%
140%
Y Lat
100%
Z Uplift
100%
100%
114%
This illustrates that the maximum footing loads for use in designing tie-down systems
are also dependent on the drilling rig position.
Design Guidance for Maximum Footing Loads
The sections above have focused on modeling the time-series of tie-down footing loads.
The time-series model developed and used is a detailed and complete model that can
used to accurately predict maximum loads for tie-down systems. The tie-down loads
are modeled as the sum of wind, inertia, and gravity load components, and this model
preserves the relative phases of these load components.
The model was used to simulate the footing loads for several structures during different
design environments. The maximum tie-down footing loads were determined, and the
relationships between these maxima and the structure types and return period and
direction of the hurricane environments were examined.
31
However, this complete time-series model is rather complex to use. This section will
focus of using the results from this complete model to develop simpler, more
approximate techniques to estimate tie-down loads that can be useful in developing
design insight and guidance.
The premise for this simplified methodology was to examine the relationship between
the maximum tie-down loads determine from the time-series simulations which
preserves the relative phases between the wind, inertia, and gravity components and
the sum of the maxima of the wind, inertia, and gravity components ignoring the relative
phases between the components and their maxima.
The maximum tie-down loads from the simulations are plotted versus the sum of the
maximum component loads for the TLP AA, Spar AS, Semi AA, and Spar AA in Figures
19 - 22. The points include the values for all environmental approach angles and return
periods for each footing load (longitudinal, lateral, and uplift). These data show that the
maximum simulated loads are very nearly a linear function of the sum of the maximum
component loads. This can be expressed as the linear equation
[Max Wind Component+ Max Inertia Component + Max Gravity Component] =
A x Max Simulated Load + B
in which A and B are constants to be determined from the data. Figures 19 - 22 include
the linear equations fit to the line representing each footing load.
32
TLP AA Substructure
8000
700
7000
600
6000
500
5000
400
4000
Lateral
300
3000
Uplift
200
2000
100
1000
y = 1.325x - 2
0
y = 1.20x + 228
Longitudinal
y = 1.26x + 5
0
0
1000
2000
3000
Simulated Loads (kips)
4000
Summed Component Loads (kips)
Summed Component Loads (kips)
TLP AA Derrick
800
800
8000
700
7000
600
6000
500
5000
400
4000
300
3000
200
2000
100
1000
y = 1.27x + 2
0
y = 1.24x + 206
Lateral
Longitudinal
Uplift
0
0
1000
2000
3000
y = 1.33x - 3
4000
Simulated Loads (kips)
Figure 19 (Max of Wind, Inertia, & Gravity Components) vs Max Simulated Loads for TLP AA Footings
33
Spar AS Derrick
Summed Component Loads (kips)
800
8000
700
7000
600
6000
500
5000
400
4000
Longitudinal
3000
300
2000
200
Lateral
Summed Component Loads (kips)
Spar AS Substructure
1000
1000
0
900
9000
800
8000
700
7000
600
6000
500
5000
400
4000
300
3000
200
2000
100
1000
Longitudinal
1000
0
0
1000
2000
3000
Simulated Loads (kips)
0
4000
Uplift
Uplift
y = 1.37x - 2
100
Lateral
y = 1.38 - 4
y = 1.39x + 95
y = 1.37x - 1
y = 1.39x - 8
y = 1.41x + 279
0
0
1000
2000
3000
0
4000
Simulated Loads (kips)
Figure 20 (Max of Wind, Inertia, & Gravity Components) vs Max Simulated Loads for Spar AS Footings
34
Semi AA Substructure
800
8000
800
8000
700
7000
700
7000
600
6000
600
6000
500
5000
500
5000
400
4000
400
4000
300
3000
200
2000
100
1000
300
3000
200
2000
100
1000
Longitudinal
Lateral
0
0
0
1000
2000
3000
Simulated Loads (kips)
4000
Uplift
y = 1.45x - 2
y = 1.43x + 5
y = 1.39x + 311
Summed Component Loads (kips)
Summed Component Loads (kips)
Semi AA Derrick
Lateral
Longitudinal
Uplift
y = 1.47x - 3
y = 1.43x + 7
0
0
0
1000
2000
3000
y = 1.41x + 341
4000
Simulated Loads (kips)
Figure 21 (Max of Wind, Inertia, & Gravity Components) vs Max Simulated Loads for Semi AA Footings
35
Spar AA Substructure
800
8000
700
7000
600
6000
500
5000
400
4000
Longitudinal
3000
300
Lateral
Uplift
2000
200
Summed Component Loads (kips)
Summed Component Loads (kips)
Spar AA Derrick
800
8000
700
7000
600
6000
500
5000
400
4000
300
3000
1000
0
0
0
1000
2000
3000
Simulated Loads (kips)
4000
y = 1.38x - 5
y = 1.39x + 79
Longitudinal
Uplift
200
2000
100
1000
y = 1.38x - 3
100
Lateral
0
0
1000
2000
3000
0
4000
Simulated Loads (kips)
Figure 22 (Max of Wind, Inertia, & Gravity Components) vs Max Simulated Loads for Spar AA Footings
y = 1.38x - 3
y = 1.39x - 7
y = 1.39x + 164
36
The longitudinal and lateral loads have intercepts that are near zero, and the uplift
loads have intercepts that are small with respect to the range of maximum loads. We
will neglect these intercepts, I.e., assume B = 0 in the equation above. The slopes of
the linear equations summarized in from Figures 19 - 22 are summarized on Table 8.
Table 8 Slope of Sum of Normal Components wrt Simulated Max Loads on Footings
Structure
Derrick
Substructure
Structure
Average
Long
Lat
Uplift
Long
Lat
Uplift
TLP AA
1.32
1.26
1.20
1.27
1.33
1.24
1.27
Spar AA
1.38
1.38
1.39
1.38
1.39
1.39
1.39
Overall
Average
% Diff
Structure
to Overall
Average
93%
102%
1.36
Spar AS
1.38
1.37
1.39
1.37
1.39
1.40
1.38
102%
Semi AA
1.45
1.43
1.39
1.47
1.43
1.41
1.43
105%
Note that the slopes A are surprisingly similar for the different structures and footing
levels.
The averages for each structure are shown.
The overall average for all
structures is 1.36 and the difference between the structural averages and the overall
average varies from 93 to 105 percent. The linear fits with similar slopes indicate that
the sum of the maximum load components can be used to provide a good
approximation of the maximum footing loads. For the overall average, we can write that
[Max Load Components] = 1.36 x Max Simulated Load
or
Max Simulated Load = 0.74 x [Max Load Components]
Thus the maximum load is equal to about 3/4 of the sum of the maximum values of the
individual load components without regard to phase.
Both the 100-year design level and the 1000-year “robustness” or “survival” check level
are addressed below.
37
100-Year Design Loads API Spec 4F recommends that design load for a footing be
the 100-yr load based on the lightship condition (90% of the weight of the derrick and
substructure) and include a load factor of 1.25, so we write
API 4F 100-Yr Design Load = 1.25 x Max Simulated Lightship 100-Yr Load
The simulations were redone with the lightship conditions. The ratio of the maximum
simulated max footing loads for all footings (derrick and substructure levels) under
normal and lightship conditions varied between 0.98 and 1.03 for the different
structures. Since the differences are small, we continued to use the normal conditions
instead of the lightship conditions as a matter of convenience. We write the following
linear expressions between the simulated maximum loads and the maximum load
components
1.25 x [Lightship 100-Yr Max Component Loads] = A x 100-Yr Max Simulated
Load
The maximum 100-yr simulated loads are plotted versus the 1.25 times the sum of the
maximum 100-yr component loads for the TLP AA, Spar AS, Semi AA, and Spar AA in
Figures 23 -26. The fits to the above linear equation are shown on the figures, and the
slopes are tabulated in Table 9 below.
Table 9 100-Yr Max (Simul) vs API 4F (1.25 x Sum of 100-Yr Lightship Max Components)
Structure
Derrick
Substructure
Structure
Average
Overall
Average
% Diff
Structure/
Overall
Long
Lat
Uplift
Long
Lat
Uplift
TLP AA
1.61
1.56
1.68
1.54
1.61
1.78
1.63
Spar AA
1.58
1.59
1.68
1.59
1.59
1.75
1.63
Spar AS
1.58
1.58
1.77
1.57
1.59
1.97
1.68
0.99
Semi AA
1.76
1.76
1.97
1.76
1.78
2.10
1.86
1.09
0.96
1.70
0.96
38
For the overall average, we can write
1.25 x [Max 100-Yr Lightship Load Components] = 1.70 x 100-Yr Max
Simulated Load.
Then
API 4F 100-Yr Design Load = 1.25 x 100-Yr Max Simulated Load
and finally
API 4F 100-Yr Design Load = 0.92 x {[Max Lightship Load Components]}
The API 4F 100-year design load can be estimated as 92 percent of the sum of the
maxima of the 100 - year load components.
39
TLPAA Substructure
Footing Loads(Long, Lat, & Uplift)
100-Yr Simulation vs 100-Yr Spec 4F Design Load
(1.25 x Sum Lightship 100-Yr Maxes)
3500
3500
3000
3000
2500
2000
1500
Long y = 1.61x
Lat R2 = 1.00
1000
Uplift
Lat
500
Long
Uplift
y = 1.56x
R2 = 1.00
500
1000
1500
2000
Sim ul 100-Yr Max Load (kips)
2500
3000
2500
2000
1500
Long
1000
Lat
Uplift
Uplift
500
y = 1.68x
R2 = 0.98
0
0
100-Yr API Spec 4F Design Load (kips)
100-Yr API Spec 4F Design Load:(kips)
TLPAA Derrick
Footing Loads(Long, Lat, & Uplift)
100-Yr Simulation vs 100-Yr Spec 4F Design Load
(1.25 x Sum Lightship 100-Yr Maxes)
3500
Long
Lat
0
0
500
1000
1500
2000
2500
Simul 100-Yr Max Loads (kips)
Figure 23 100-Yr Simulated Load vs 100-Yr API Spec 4F Footing Loads for TLP AA
3000
y = 1.54x
R2 = 1.00
y = 1.61x
R2 = 0.99
y = 1.78x
R2 = 0.97
3500
40
SparAS Substructure
Footing Loads(Long, Lat, & Uplift)
100-Yr Simulation vs 100-Yr Spec 4F Design Load
(1.25 x Sum Lightship 100-Yr Maxes)
2500
2500
2000
2000
1500
1000
Longy = 1.58x
Lat R2 = 1.00
500
Uplift
Lat
y = 1.58x
R2 = 1.00
100-Yr API Spec 4F Design Load (kips)
100-Yr API Spec 4F Design Load (kips)
SparAS Derrick
Footing Loads(Long, Lat, & Uplift)
100-Yr Simulation vs 100-Yr Spec 4F Design Load
(1.25 x Sum Lightship 100-Yr Maxes)
1500
1000
Long
Lat
Uplift
500
Uplift
Long
Long y = 1.77x
Uplift R2 = 0.98
0
0
500
1000
1500
Sim ul Max 100-Yr Load (kips)
2000
2500
Lat
y = 1.57x
R2 = 1.00
y = 1.59x
R2 = 1.00
y = 1.97x
R2 = 0.92
0
0
500
1000
1500
Sim ul Max 100-Yr Load (kips)
Figure 24 100-Yr Simulated Load vs 100 Yr-API Spec 4F Footing Loads for Spar AS
2000
2500
41
SemiAA Substructure
Footing Loads(Long, Lat, & Uplift)
100-Yr Simulation vs Spec 4F Design Load
(1.25 x Sum Lightship 100-Yr Maxes)
4000
4000
3500
3500
3000
3000
2500
2000
1500
Long
Lat
1000
Uplift
Lat
500
Long
Uplift
y = 1.76x
R2 = 1.00
y = 1.76x
R2 = 1.00
y = 1.97x
R2 = 0.96
0
0
500
1000
1500
2000
2500
Sim ul 100-Yr Max Load (kips)
3000
3500
4000
100-Yr API Spec 4F Deign Load (kips)
100-Yr API Spec 4F Design Load (kips)
SemiAA Derrick
Footing Loads(Long, Lat, & Uplift)
100-Yr Simulation vs Spec 4F Design Load
(1.25 x Sum Lightship 100-Yr Maxes)
2500
2000
1500
Long
Lat
1000
Uplift
Uplift
500
Long
Lat
y = 1.76x
R2 = 1.00
y = 1.78x
R2 = 1.00
y = 2.10x
R2 = 0.93
0
0
500
1000
1500
2000
2500
Sim ul 100-Yr Max Load (kips)
Figure 25 100-Yr Simulated Load vs 100-Yr API Spec 4F Footing Loads for Semi AS
3000
3500
4000
42
SparAA Derrick
Footing Loads(Long, Lat, & Uplift)
100-Yr Simulation vs Spec 4FDesign Load
(1.25 x Sum Lightship 100-Yr Maxes)
SparAA Substructure
Footing Loads(Long, Lat, & Uplift)
100-Yr Simulation vs Spec 4F Design Load
(1.25 x Sum Lightship 100-Yr Maxes)
5000
3500
4500
3000
3500
3000
2500
2000
Long y = 1.58x
Lat R2 = 1.00
1500
Uplift
1000
Lat
Long
500
Uplift
y = 1.59x
R2 = 1.00
500
1000
1500
2000
2500
3000
3500
4000
4500
2500
2000
1500
Long
1000
Lat
Uplift
Uplift
500
y = 1.68x
R2 = 1.00
0
0
100-Yr API Spec 4F Design Load (kips)
100-Yr API Spec 4F Design Load (kips)
4000
5000
Long
Lat
0
0
500
1000
1500
2000
2500
Sim ul 100-Yr Max Loads (kips)
Sim ul 100-Yr Max Loads (kips)
Figure 26 100-Yr Simulated Load vs 100 Yr-API Spec 4F Footing Load for Spar AA
3000
y = 1.59x
R2 = 1.00
y = 1.59x
R2 = 1.00
y = 1.75x
R2 = 0.99
3500
43
1000-Year “Robustness” or “Survival” Check We tested the following as an
approximation for the robustness check.
Robustness Check Load = 1000-Yr Max Simulated Load
We began with the assumed approximation that
1000-Yr Max Simulated Load = 2.0 x Max 100-Yr Load
and approximated that by
A x Max 1000-Yr Simulated Load = 2.0 x [Max 100-Yr Lightship Load
Components]
The maximum 1000-yr loads from the simulations are plotted versus 2.0 times the sum
of the maximum 100-yr component loads for the TLP AA, Spar AS, and Semi AA in
Figures 27 - 30. The fits to the above linear equation are shown on the figures, and the
slopes are tabulated in Table 10 below.
Table 10 1000-Yr Max (Simul) vs Robustness Check (2 x Sum of 100-Yr Lightship Max
Components)
Derrick
Substructure
Structure
Average
Long
Lat
Uplift
Long
Lat
Uplift
TLP AA
1.63
1.61
1.53
1.61
1.65
1.51
1.59
Spar AA
1.77
1.79
1.72
1.81
1.80
1.73
1.77
Overall
Average
% Diff
Structure/
Overall
0.93
1.04
1.71
Spar AS
1.78
1.79
1.72
1.81
1.80
1.73
1.77
1.04
Semi AA
1.72
1.72
1.69
1.69
1.73
1.68
1.71
1.00
For the overall average, we can write
44
1.71 x Max Simulated 1000-Yr Load = 2.0 x [Max 100-Yr Lightship Load
Components]
The suggested robustness check load, i.e. the max 1000-year load, is then
Robustness Check Load = 1.17 x [Max 100-Yr Lightship Load Components]
Closure It is useful to examine the two design guidance equations above in light of the
equation we fit the simulated data
Max Simulated Load = 0.74 x [Max Load Components]
Using the above equation, the 100-year design load equation
API 4F 100-Yr Design Load = 0.92 x {[Max Lightship Load Components]}
can be restated as
API 4F 100-Year Max Load = 1.24 x 100-year Max Load
which is consistent with the definition of the API 4F design load and the fact that there is
little difference between the normal and lightship loads.
Similarly, the robustness check load equation can be restated as
Robustness Check Load = 1000-Year Load = 1.58 x 100-year Max Load
which is somewhat (21 percent) less than the arbitrarily proposed 2.0 x 100-year load.
45
The appropriate load factors on the 100-year load in the above equations should be
reviewed to account the resistance factors that are in the design standards and
practices before finalizing a design guidance recommendation.
46
TLPAA Substructure
Footing Loads(Long, Lat, & Uplift)
1000-Yr Simulation vs Robustness Check
(2.0 x Sum Lightship 100-Yr Maxes)
5000
5000
4000
4000
3000
2000
Long
Lat
Uplift
1000
y = 1.63x
R2 = 0.99
y = 1.61x
R2 = 0.99
Lat
Long
Uplift
0
0
1000
2000
3000
Sim ul 1000-Yr Max Load (kips)
4000
5000
y = 1.53x
R2 = 1.00
Robustness Check (kips)
Robustness Check: (kips)
TLPAA Derrick
Footing Loads(Long, Lat, & Uplift)
1000-Yr Simulation vs Robustness Check
(2.0 x Sum Lightship 100-Yr Maxes)
3000
2000
Long
Lat
Uplift
1000
Lat
Long
Uplift
0
0
1000
2000
3000
Sim ul 1000-Yr Max Load (kips)
Figure 27 1000-Yr Simulated Load vs Robustness Check Load for TLPAA
4000
y = 1.61x
R2 = 1.00
y = 1.65x
R2 = 0.99
y = 1.51x
R2 = 1.00
5000
47
SparAS Substructure
Footing Loads(Long, Lat, & Uplift)
1000-Yr Simulation vs Robustness Check
(2.0 x Sum Lightship 100-Yr Maxes)
4000
4000
3000
3000
2000
Long
y = 1.78x
Lat R2 = 1.00
1000
Uplift
Lat
0
1000
2000
Sim ul Max 1000-Yr Load (kips)
3000
2000
Long
Lat
1000
Uplift
y = 1.79x
R2 = 1.00
Long y = 1.72x
2
Uplift R = 1.00
0
Robustness Check (kips)
Robustness Check (kips)
SparAS Derrick
Footing Loads(Long, Lat, & Uplift)
1000-Yr Simulation vs Robustness Check
(2.0 x Sum Lightship 100-Yr Maxes)
4000
Lat
Long
Uplift
y = 1.81x
R2 = 1.00
y = 1.80x
R2 = 1.00
y = 1.73x
R2 = 1.00
0
0
1000
2000
Sim ul Max 1000-Yr Load (kips)
Figure 28 1000-Yr Simulated Load vs Robustness Check Load for SparAS
3000
4000
48
SemiAA Substructure
Footing Loads(Long, Lat, & Uplift)
1000-Yr Simulation vs Robustness Check
(2.0 x Sum Lightship 100-Yr Maxes)
6000
6000
5000
5000
4000
4000
3000
2000
Long
y = 1.72x
Lat R2 = 0.99
Uplift
1000
Lat
Long
y = 1.72x
R2 = 0.99
0
1000
2000
3000
4000
Sim ul 1000-Yr Max Loads (kips)
5000
3000
Long
2000
Lat
Uplift
1000
Lat
Long
y = 1.69x
Uplift R2 = 0.99
0
Robustness Check (kips)
Robustness Check (kips)
SemiAA Derrick
Footing Loads(Long, Lat, & Uplift)
1000-Yr Simulation vs Robustness Check
(2.0 x Sum Lightship 100-Yr Maxes)
6000
Uplift
y = 1.69x
R2 = 0.99
y = 1.73x
R2 = 0.88
y = 1.68x
R2 = 0.94
0
0
1000
2000
3000
4000
Sim ul 1000-Yr Max Loads (kips)
Figure 29 1000-Yr Simulated Load vs Robustness Check Load for Semi AA
5000
6000
49
SparAA Substructure
Footing Loads(Long, Lat, & Uplift)
1000-Yr Simulation vs Robustness Check
(2.0 x Sum Lightship 100-Yr Maxes)
7000
7000
6000
6000
5000
5000
4000
3000
Long
2000
Lat
y = 1.77x
R2 = 1.00
Robustness Check (kips)
Robustness Check (kips)
SparAA Derrick
Footing Loads(Long, Lat, & Uplift)
1000-Yr Simulation vs Robustness Check
(2.0 x Sum Lightship 100-Yr Maxes)
4000
3000
Long
2000
Lat
Uplift
Uplift
y = 1.79x
R2 = 1.00
Long y = 1.74x
2
Uplift R = 1.00
Lat
1000
Lat
1000
Long
Uplift
y = 1.79x
R2 = 1.00
y = 1.79x
R2 = 1.00
y = 1.74x
R2 = 1.00
0
0
0
1000
2000
3000
4000
5000
Sim ul 1000-Yr Max Loads (kips(
6000
7000
0
1000
2000
3000
4000
5000
Sim ul 1000-Yr Max Loads (kips)
Figure 30 1000-Yr Simulated Load vs Robustness Check Load for Spar AA
6000
7000
50
Approximations
for
Determining
Maximum
Components for Providing Design Guidance
Load
The previous section focused on developing a simplified methodology for providing
design guidance by examining the relationship between the maximum tie-down loads
determined from the time-series simulations (which preserves the relative phases
between the wind, inertia, and gravity components) and the sum of the maxima of the
wind, inertia, and gravity components (which ignores the relative phases between the
components and their maxima). However the maxima of the components were still
taken from the complete time series. Here we consider a simpler method to estimate
these maximum components by other means.
We assume that all the mass and geometric properties of the floating structure, derrick,
and substructure are known.
For a given environment and direction relative to the structure, the following information
is needed to estimate the maximum footing forces:
Floating structure motion (referenced to the center of gravity of the derrick or
derrick + substructure)
Maximum horizontal acceleration
Maximum vertical acceleration
Maximum tilt angle of the deck (roll + pitch)
Wind velocity
Maximum (3-sec) wind velocity (referenced to the center-of-pressure of
the derrick or derrick + substructure
Information on the maximum motions of the floating structure can be obtained from
Time domain simulations of the structure motions
Pseudo-static time domain analysis of the structure
Model tests in the design environment
51
Response Amplitude Operators determined from either analytical studies
or model tests
The maximum forces due to the structure motions can be determined from the
accelerations and motion data. The maximum wind load can be determined from the
wind velocity using the equations presented earlier in this report.
Finally these maximum force components due to structure motions and wind are added
to compute the maximum footing loads in the x, y, and z directions. We used the
maximum accelerations & inclination angles from the time-domain simulations as
presented in Table 2 for the TLP and Spar to test this method, and were able to
estimate the maximum footing loads determined as the [Max 100-Yr Load
Components] within ~ 5 percent.
Based on these results, estimating the [Max N-Yr Load Components] based on the
maximum FPS accelerations can provide usefully accurate information for computing
design loads. Care should be taken to ensure that the accelerations estimated by these
other more approximate methods (time domain simulations of the structure motions,
pseudo-static time domain analysis of the structure motion, model tests, Response
Amplitude Operators) are accurate representations of the structures motions.
Computing Maximum Total Footing
Assumed Phasing of Component Loads
Loads
Based
on
We also briefly investigated a possible design practice to compute maximum footing
loads based on a dominant load component plus the associated (i.e., simultaneous)
values of the other load components. Some cases considered included:
1. Maximum inertia load + associated wind load + associated gravity load
2. Maximum wind load + associated inertia load + associated gravity load
3. Maximum gravity load (i.e., gravity load at maximum heel angle) +
associated wind load and associated inertia load.
52
The maxima and associated values for the components were taken from the time
domain simulations.
An example for the total maximum loads and moments at the derrick footing loads for
the SparAS is shown in the following Table 11.
Cases 1, 2, and 3 are compared to the
maxima from the time domain simulation (Case 4). Results for the 100-yr environment
approaching from 45 degrees are shown.
Table 11 Comparison of Total Forces & Moments at the Derrick Footing Level for SparAS Based
On Different Assumptions Regarding the Addition of Component Forces
Case
Total Force (kips)
Total Moment (ft-kips)
X
Y
Z
MX
MY
MZ
1
923
917
-1642
-93947
94580
12
2
743
739
-1665
-75700
76086
-6
3
537
529
-1649
-52885
53741
-12
4
1024
1017
-1620
-104367
105141
19
These ad-hoc assumptions represented in Case 1, 2, and 3 do not compare well with
Case 4 nor do any of them seem to provide a useful basis for estimating Case 4.
Perhaps an appropriate assumption for the relative phasing of load component maxima
could be developed for a particular structure or type of structure, but Figures 14 & 15
(which compare force components at the time of maximum total footing forces for
different structures) suggest that it is not feasible to develop a consistent formula or
recipe that could accurately determine the maximum footing loads for all structures
based on an assumed relative phasing of their maximum load components.
Conclusions
1. Realistic time-domain simulations of tie-down footing loads were completed for four
floating structure /drilling rig combinations in hurricane conditions.
The maximum
53
footing loads were modeled as the sum of the wind, inertia, and gravity forces. The
forces were found to be dependent upon:
-
the structure motion response to the environment
-
the weight and geometry of the drilling rig (derrick and substructure)
For the structure/drilling rig combinations analyzed here
-
maximum footing loads for the same drilling rig on three different structures (
TLP, Spar, Semi) varied by a factor of 1.4 (horizontal) and 1.5 (uplift)
-
maximum footing loads for two different drilling rigs on the same structure (Spar)
varied by a factor of 1.7 (horizontal) and 2.2 (uplift)
This indicates that tie-down systems should be purpose-designed for a specific
structure and drilling rig combination.
2. The maximum footing load is the sum of the wind, inertia, and gravity load
components time series and depends upon their relative their relative phases.
However, the maximum footing load was found to be a linear function of the
independent maxima (without regard to phasing) of the wind, inertia, and gravity
components. The equation
Max (Simulated) Load = 0.74 x [Max Load Components]
was found to be a good approximation for both the derrick and substructure footing
loads for all structure and drilling rig combinations over the range, environment
directions and return periods studied.
Since the simulation program has been well
calibrated with laboratory and field data, we will assume that “Simulated” and simply
refer the “Max Load”.
3. Guidelines for tie-down design loads were investigated using the linear relationship
between the Max Load and the [Max Load Components].
100-Yr Design Load API Spec 4F recommends that the design load for footings be
calculated as the 100-yr load based on the lightship condition (90% of the weight of the
54
derrick and substructure) and include a load factor of 1.25. In terms of the sum of the
maximum load components, we found this to be well approximated by
API 4F 100-Yr Design Load = 0.92 x [Max 100-Yr Lightship Load Components]
= 1.24 Max 100-Year Load
1000-Yr Robustness Check Load The suggested robustness check load for
footings is the 1000-year load. In terms of the sum of the maximum load components,
we found this to be well approximated by
Robustness Check Load = 1.17 x [Max 100-Yr Lightship Load Components]
= 1.58 x Max 100-year Load
The appropriate load factors on the 100-year load in the above equations should be
reviewed to account the resistance factors that are in the design standards and
practices before finalizing a design guidance recommendation.
4. The position of the drilling derrick and associated equipment relative to the centered
position on the substructure can significantly increase the derrick footing loads, and
should be accounted for in design and operational planning. Horizontal and uplift loads
increased by up to 40 and 15 percent over the loads for the centered derrick position,
respectively for the example analyzed in this study.
5. The sums of the maximum wind, inertia, and gravity component loads can be used in
the above equations to provide useful estimates of the design and robustness loads
when a more complete simulation or analysis is not available.
Based on the limited
investigation conducted here, these component loads can be approximated for a given
structure, drilling rig, and environment by other means (e.g., RAOs and used to use in
the above equations to estimate the design criteria. Care has to be taken to evaluate
the accuracy of the approximation.
evaluated.
This approximate method should be further
55
Acknowledgements
The authors gratefully acknowledge the American Petroleum Institute for their
sponsorship and support for project.
We also thank the following who served as
members of the Industry Advisory Board for this project: Dave Knoll (Shell); Ward
Turner & Doug Angevine (ExxonMobil); Pat O’Conner, Tammer Botros, Pierre Beynet
(BP); Mark Trevithick (T&T Engineering Services); and Michael Effenberger (Stress
Engineering Services). Their guidance, suggestions and advice was a great benefit and
added considerable value to the project. We also acknowledge and thank Hugh Banon
(BP) and Magne Nygard (AkerKvaerner) for information on the deepwater
semisubmersible drilling and production platform used in this study.
References
1. Assessment of Drilling & Workover Rig Storm Sea Fastenings on Offshore
Floating Platforms during Hurricane Ivan Phase 1: Data Collection Report, by
E.G. Ward and J.M. Gebara,
submitted to Minerals Management Service,
August 1, 2006
2. Assessment of Drilling & Workover Rig Storm Sea Fastenings on Offshore
Floating Platforms during Hurricane Ivan Phase 1: Analysis Report, by E.G.
Ward and J.M. Gebara, submitted to Minerals Management Service, January,
2007.
3. Assessment of Storm Sea Fastenings for Drilling and Workover Rigs on Floating
Production Systems during Hurricane Ivan: Phase 1, E. G. Ward (OTRC) and J.
M. Gebara, (Technip Offshore Inc. USA), 2006 Offshore Technology
Conference, Paper 18324
4. Performance of Drilling-Rig Sea Fastenings on Floating Production Systems, E.
G. Ward (OTRC), J. M. Gebara, (Technip Offshore Inc.USA), M. H. Kim (Texas
A&M University) and Nadia Ghoneim (Technip Offshore Inc.USA), 2007
Offshore Technology Conference Paper 18986.
56
5. API Bulletin 2INT-MET, 2007, Interim Guidance on Hurricane Conditions in the
Gulf of Mexico: American Petroleum Institute API Spec 4F
6. API Specification 4F 3rd Edition, 2008, Specification for Drilling and Well
Servicing Structures: American Petroleum Institute.
7. Loads on Tie-Down Systems For Floating Drilling Rigs During Hurricane
Conditions, Yoon-Hyeok Bae, Thesis Submitted To The Office Of Graduate
Studies Of Texas A&M University, 2008
8. CHARM, Kim, M.H., 1997, CHARM3D user’s manual: Ocean Engineering
Program, Civil Engineering Department, Texas A&M University, College Station,
TX.
9. WAMIT Theory Manual, C - H Lee, MIT Report 95-2, Dept. of Ocean
Eng. , MIT, 1995
10. Benchmark Model Tests on the DeepStar Theme Structures FPSO, SPAR, and
TLP, Johan Wichers and Paul Devlin, 2004 Offshore Technology Conference,
Paper 16582
11. Personal Communication, Hugh Banon (BP) and Magne Nygard (AkerKvaerner),
2007, information on the deepwater semisubmersible used in this study
57
Appendix A
Details of Analyses, Cases Studied and Results
for the Final Report
Loads on Tie-Down Systems for Drilling Rigs
An API Sponsored Project Conducted by the
Offshore Technology Research Center
by
Yoon Hyeok Bae, Texas A&M University
58
Table of Contents
Appendix A......................................................................................................... 57
Table of Contents ............................................................................................... 58
List of Tables and Figures .................................................................................. 59
1 DYNAMIC LOAD ANALYSIS ON TIE-DOWN SYSTEMS........................... 66
1.1.1
Numerical Modeling of TLP........................................................... 67
1.1.2
Numerical Modeling of SPAR ....................................................... 70
1.1.3
Numerical Modeling of SEMI ........................................................ 72
1.1.4
Configurations of Derrick AA......................................................... 75
1.1.5
Configurations of Derrick AS......................................................... 80
1.1.6
Environmental Condition............................................................... 85
Added Mass and Damping Coefficient.......................................... 91
1.2.1
Forces on Derrick and Skid Base ................................................. 93
1.2.2
1.2.3
Reaction Forces on the Footings .................................................. 97
2 CASE 1. TLP (3000FT) WITH DERRICK AA – 0 DEGREE CASE ........... 101
2.6.1
Derrick Reaction Force ............................................................... 109
2.6.2
Skid Base Reaction Force .......................................................... 111
2.7.1
200-year Hurricane Condition ..................................................... 114
2.7.2
1000-year Hurricane Condition ................................................... 116
3 CASE 2. SPAR (3000FT) WITH DERRICK AA – 0 DEGREE CASE ........ 120
3.6.1
Derrick Reaction Force ............................................................... 127
3.6.2
Skid Base Reaction Force .......................................................... 129
3.7.1
200-year Hurricane Condition ..................................................... 132
3.7.2
1000-year Hurricane Condition ................................................... 134
4 CASE 3. SEMI (10,000FT) WITH DERRICK AA – 0 DEGREE CASE ...... 137
4.6.1
Skid Base Reaction Force .......................................................... 146
4.7.1
200-year Hurricane Condition ..................................................... 148
4.7.2
1000-year Hurricane Condition ................................................... 150
5 SUMMARY................................................................................................ 153
6 ADDITIONAL TOPICS .............................................................................. 163
6.1.1
Simple Beam Solution................................................................. 163
6.1.2
Off-centered derrick case study .................................................. 165
6.1.2.1
Case 1. Centered Position ...................................................... 165
6.1.2.2
Case 2. Off-Centered Position to Lee Side ............................. 166
6.1.2.3
Case 3. Off-Centered Position to Weather Side...................... 167
6.2.1
Time Domain Simulation Data .................................................... 169
59
List of Tables and Figures
Figure 1 Drilling Rig Schematic ....................................................................................... 2
Figure 2 Drilling Rig AA ................................................................................................... 6
Figure 3 Drilling Rig AS .................................................................................................. 7
Figure 4 3-sec Wind Gust Velocity Profiles for RP = 100, 200, & 1000 Years
(wind reference elevations & deck elevations shown) ..................................................... 9
Figure 5. Wind Speed Time Series................................................................................ 11
Figure 6-a Inertial Forces Due To The Motions Of The Floating Structure.................... 12
Figure 6-b External Forces (Wind & Gravity)................................................................. 12
Figure 6-c Total Forces (Inertia, Wind, & Gravity) Applied to Tie-Down Footings ......... 13
Figure 7 Skid Beam and Footing Model ........................................................................ 14
Figure 8 Force Nomenclature Convention for Footing Forces....................................... 14
Figure 9 Simulated Total Footing Forces on Weather and Lee Footings for a Derrick on
a TLP in Horizontal (Surge) & Vertical (Heave) Directions ............................................ 15
Figure 10 Force (Reaction) Maxima of the Total and Wind & Inertial Components of the
Footing Loads on the Weather Side of an Example Spar.............................................. 16
Figure 11 TLP AA Max Footing Forces vs Environmental Approach Angles for RP =
100, 200, & 100 Years................................................................................................... 21
Figure 12 Spar AS Max Footing Forces vs Environmental Approach Angles for RP =
100, 200, & 1000 Years................................................................................................. 22
Figure 13 Semi AA Max Footing Forces vs Environmental Approach Angles for RP =
100, 200, & 1000 Years................................................................................................. 23
Figure14. Force Components at the Time of Max Total Horiz Footing Force for Different
Structures and Drilling Rigs (100-Yr RP, Environ Direction 22.5 deg)........................... 24
Figure15. Force Components at the Time of Max Total Uplift Footing Force for Different
Structures and Drilling Rigs (100-Yr RP, Environ Direction 22.5 deg)........................... 25
Figure 16 TLP AA, Spar AS, & Semi AA: Max Derrick & Substructure Footing Loads
(kips) ............................................................................................................................. 26
Figure 17 Spar AS & Spar AA: Max Derrick & Substructure Footing Loads (kips) ....... 28
Figure 19 (Max of Wind, Inertia, & Gravity Components) vs Max Simulated Loads for
TLP AA Footings ........................................................................................................... 32
Figure 20 (Max of Wind, Inertia, & Gravity Components) vs Max Simulated Loads for
Spar AS Footings .......................................................................................................... 33
Figure 21 (Max of Wind, Inertia, & Gravity Components) vs Max Simulated Loads for
Semi AA Footings ......................................................................................................... 34
Figure 22 (Max of Wind, Inertia, & Gravity Components) vs Max Simulated Loads for
Spar AA Footings .......................................................................................................... 35
Table 9 100-Yr Max (Simul) vs API 4F (1.25 x Sum of 100-Yr Lightship Max
Components)................................................................................................................. 37
Figure 23 100-Yr Simulated Load vs 100-Yr API Spec 4F Footing Loads for TLP AA .. 39
Figure 24 100-Yr Simulated Load vs 100 Yr-API Spec 4F Footing Loads for Spar AS . 40
Figure 25 100-Yr Simulated Load vs 100-Yr API Spec 4F Footing Loads for Semi AS 41
Figure 26 100-Yr Simulated Load vs 100 Yr-API Spec 4F Footing Load for Spar AA... 42
Figure 27 1000-Yr Simulated Load vs Robustness Check Load for TLPAA.................. 46
Figure 28 1000-Yr Simulated Load vs Robustness Check Load for SparAS................. 47
60
Figure 29 1000-Yr Simulated Load vs Robustness Check Load for Semi AA ............... 48
Figure 30 1000-Yr Simulated Load vs Robustness Check Load for Spar AA................ 49
Table 1-1 Principal Dimensions..................................................................................... 67
Fig 1-1 Configuration of TLP Hull .................................................................................. 68
Table 1-2 TLP Hull Load Condition ............................................................................... 68
Table 1-2 Continued...................................................................................................... 69
Fig 1-2 Mesh Generation of the TLP ............................................................................. 69
Table 1-3 Mooring Lines Specification .......................................................................... 69
Fig 1-3 Configuration of SPAR Hull and Mooring/Riser................................................. 70
Table 1-4 Principal Particulars of the SPAR Platform.................................................... 71
Table 1-5 Mooring and Riser System Characteristics ................................................... 71
Fig 1-4 Mesh Generation of the SPAR .......................................................................... 72
Table 1-6 Principal Particulars of the SEMI Platform..................................................... 72
Table 1-6 Continued...................................................................................................... 73
Fig 1-5 Mesh Generation of the SEMI ........................................................................... 73
Table 1-7 Principal Particulars of the SEMI Platform..................................................... 74
Fig 1-6 Top View of Mooring Lines of SEMI .................................................................. 74
Fig 1-7 Side View of Mooring Lines of SEMI ................................................................. 75
Fig 1-8 Derrick Structure General Arrangement ............................................................ 76
Table 1-8 Center of Pressure and Center of Gravity ..................................................... 77
Table 1-9 Projected Area in Different Projected Angles ................................................ 77
Fig 1-9 Derrick and Skid Base Footings ........................................................................ 78
Fig 1-10 Simplified Model for Radius of Gyration Calculation ....................................... 79
Fig 1-11 Derrick Structure General Arrangement.......................................................... 81
Table 1-10 Center of Pressure and Center of Gravity ................................................... 82
Table 1-11 Projected Area in Different Projected Angles .............................................. 82
Fig 1-12 Derrick and Skid Base Footings ...................................................................... 83
Fig 1-13 Simplified Model for Radius of Gyration Calculation ....................................... 84
Table 1-12 Environmental Conditions ........................................................................... 86
Fig 1-14 Wave Elevation and Spectrum ........................................................................ 87
Fig 1-15 Wind Speed Time Series and Spectrum (100, 200 and 1000 year condition) . 89
Fig 1-16 Current Profile in Hurricane Conditions........................................................... 90
Fig 1-17 Added Mass Coefficient of (a) TLP and (b) SPAR .......................................... 91
Fig 1-17 Continued........................................................................................................ 92
Fig 1-18 Damping Coefficient of (a) TLP and (b) SPAR ................................................ 92
Fig 1-18 Continued........................................................................................................ 93
Fig 1-19 Two Reference Frames................................................................................... 94
Fig 1-20 Horizontal Reaction Forces ............................................................................. 97
Fig 1-21 Vertical Reaction Forces ................................................................................. 99
Fig 2-1 TLP Surge Motion and Spectrum (0 Degrees) ................................................ 101
Fig 2-2 TLP Heave Motion and Spectrum (0 Degrees) ............................................... 101
Fig 2-3 TLP Pitch Motion and Spectrum (0 Degrees).................................................. 102
Fig 2-4 Surge Inertia Force of (a) Derrick and (b) Derrick + Skid Base (TLP with 0
Degrees) ..................................................................................................................... 102
Fig 2-5 Heave Inertia Force of (a) Derrick and (b) Derrick + Skid Base (TLP with 0
Degrees) ..................................................................................................................... 103
61
Table 2-1 Inertia Force Statistics for (a) Derrick and (b) Derrick + Skid Base ............. 103
(TLP with 0 Degrees) .................................................................................................. 103
Table 2-2 Wind Force on Derrick and Skid Base (TLP with 0 Degrees)...................... 104
Fig 2-6 Surge Wind Force for (a) Derrick and (b) Derrick + Skid Base (TLP with 0
Degrees) ..................................................................................................................... 104
Fig 2-7 Heave Wind Force for (a) Derrick and (b) Derrick + Skid Base (TLP with 0
Degrees) ..................................................................................................................... 105
Table 2-3 Wind Force Statistics for (a) Derrick and (b) Derrick + Skid Base (TLP with 0
Degrees) ..................................................................................................................... 105
Fig 2-8 Surge Gravity Force for (a) Derrick and (b) Derrick + Skid Base (TLP with 0
Degrees) ..................................................................................................................... 106
Fig 2-9 Heave Gravity Force for (a) Derrick and (b) Derrick + Skid Base (TLP with 0
Degrees) ..................................................................................................................... 106
Table 2-4 Gravity Force Statistics for (a) Derrick and (b) Derrick + Skid Base............ 107
(TLP with 0 Degrees) .................................................................................................. 107
Fig 2-10 Surge Total Force for (a) Derrick and (b) Derrick + Skid Base (TLP with 0
Degrees) ..................................................................................................................... 107
Fig 2-11 Heave Total Force for (a) Derrick and (b) Derrick + Skid Base (TLP with 0
Degrees) ..................................................................................................................... 108
Table 2-5 Total Force Statistics for (a) Derrick and (b) Derrick + Skid Base (TLP with 0
Degrees) ..................................................................................................................... 108
Fig 2-12 Direction of Force and Node Location of Derrick........................................... 109
Fig 2-13 (a) Surge Reaction (b) Heave Reaction on Footing 1 (TLP with 0 Degrees). 109
Fig 2-14 (a) Surge Reaction (b) Heave Reaction on Footing 2 (TLP with 0 Degrees). 110
Fig 2-15 (a) Surge Reaction (b) Heave Reaction on Footing 3 (TLP with 0 Degrees). 110
Fig 2-16 (a) Surge Reaction (b) Heave Reaction on Footing 4 (TLP with 0 Degrees). 110
Table 2-6 Derrick Reaction Force Statistics (TLP with 0 Degrees) ............................. 111
Fig 2-17 Direction of Force and Node Location of Skid Base...................................... 112
Fig 2-18 (a) Surge Reaction (b) Heave Reaction on Footing 5 (TLP with 0 Degrees). 112
Fig 2-19 (a) Surge Reaction (b) Heave Reaction on Footing 6 (TLP with 0 Degrees). 112
Fig 2-20 (a) Surge Reaction (b) Heave Reaction on Footing 7 (TLP with 0 Degrees). 113
Fig 2-21 (a) Surge Reaction (b) Heave Reaction on Footing 8 (TLP with 0 Degrees). 113
Table 2-7 Skid Base Reaction Force Statistics (TLP with 0 Degrees)......................... 113
Table 2-7 Continued.................................................................................................... 114
Table 2-8 Force Statistics for (a) Derrick and (b) Derrick + Skid Base (TLP with 0
Degrees) ..................................................................................................................... 114
Table 2-8 Continued.................................................................................................... 115
Table 2-9 Reaction Force Statistics (TLP with 0 Degrees).......................................... 115
Table 2-9 Continued.................................................................................................... 116
Table 2-10 Force Statistics for (a) Derrick and (b) Derrick + Skid Base (TLP with 0
Degrees) ..................................................................................................................... 116
Table 2-10 Continued.................................................................................................. 117
Table 2-11 Reaction Force Statistics (TLP with 0 Degrees)........................................ 117
Table 2-11 Continued.................................................................................................. 118
Fig 2-22 Mean Surge Reaction Force (TLP with 0 Degrees)....................................... 119
Fig 2-23 Mean Heave Reaction Force (TLP with 0 Degrees)...................................... 119
62
Fig 3-1 SPAR Surge Motion and Spectrum (0 Degrees) ............................................. 120
Fig 3-2 SPAR Heave Motion and Spectrum (0 Degrees) ............................................ 120
Fig 3-3 SPAR Pitch Motion and Spectrum (0 Degrees)............................................... 121
Fig 3-4 Surge Inertia Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0
Degrees) ..................................................................................................................... 121
Fig 3-5 Heave Inertia Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0
Degrees) ..................................................................................................................... 122
Table 3-1 Inertia Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SPAR with
0 Degrees) .................................................................................................................. 122
Table 3-2 Wind Force of Derrick and Skid Base (SPAR with 0 Degrees).................... 123
Fig 3-6 Surge Wind Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0
Degrees) ..................................................................................................................... 123
Fig 3-7 Heave Wind Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0
Degrees) ..................................................................................................................... 124
Table 3-3 Wind Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SPAR with
0 Degrees) .................................................................................................................. 124
Fig 3-8 Surge Gravity Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0
Degrees) ..................................................................................................................... 125
Fig 3-9 Heave Gravity Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0
Degrees) ..................................................................................................................... 125
Table 3-4 Gravity Force Statistics for (a) Derrick and (b) Derrick + Skid Base............ 125
(SPAR with 0 Degrees) ............................................................................................... 125
Fig 3-10 Surge Total Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0
Degrees) ..................................................................................................................... 126
Fig 3-11 Heave Total Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0
Degrees) ..................................................................................................................... 126
Table 3-5 Total Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SPAR with 0
Degrees) ..................................................................................................................... 127
Fig 3-12 (a) Surge Reaction (b) Heave Reaction on Footing 1 (SPAR with 0 Degrees)
.................................................................................................................................... 127
Fig 3-13 (a) Surge Reaction (b) Heave Reaction on Footing 2 (SPAR with 0 Degrees)
.................................................................................................................................... 128
Fig 3-14 (a) Surge Reaction (b) Heave Reaction on Footing 3 (SPAR with 0 Degrees)
.................................................................................................................................... 128
Fig 3-15 (a) Surge Reaction (b) Heave Reaction on Footing 4 (SPAR with 0 Degrees)
.................................................................................................................................... 128
Table 3-6 Derrick Reaction Force Statistics (SPAR with 0 Degrees) .......................... 129
Fig 3-16 (a) Surge Reaction (b) Heave Reaction on Footing 5 (SPAR with 0 Degrees)
.................................................................................................................................... 129
Fig 3-17 (a) Surge Reaction (b) Heave Reaction on Footing 6 (SPAR with 0 Degrees)
.................................................................................................................................... 130
Fig 3-18 (a) Surge Reaction (b) Heave Reaction on Footing 7 (SPAR with 0 Degrees)
.................................................................................................................................... 130
Fig 3-19 (a) Surge Reaction (b) Heave Reaction on Footing 8 (SPAR with 0 Degrees)
.................................................................................................................................... 130
Table 3-7 Skid Base Reaction Force Statistics (SPAR with 0 Degrees)...................... 131
63
Table 3-8 Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SPAR with 0
Degrees) ..................................................................................................................... 132
Table 3-9 Reaction Force Statistics (SPAR with 0 Degrees)....................................... 133
Table 3-10 Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SPAR with 0
Degrees) ..................................................................................................................... 134
Table 3-11 Reaction Force Statistics (SPAR with 0 Degrees)..................................... 135
Fig 3-20 Mean Surge Reaction Force (SPAR with 0 Degrees) ................................... 136
Fig 3-21 Mean Heave Reaction Force (SPAR with 0 Degrees)................................... 136
Fig 4-1 SEMI Surge Motion and Spectrum (0 Degrees) .............................................. 137
Fig 4-2 SEMI Heave Motion and Spectrum (0 Degrees) ............................................. 137
Fig 4-3 SEMI Pitch Motion and Spectrum (0 Degrees)................................................ 138
Fig 4-4 Surge Inertia Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0
Degrees) ..................................................................................................................... 138
Fig 4-5 Heave Inertia Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0
Degrees) ..................................................................................................................... 139
Table 4-1 Inertia Force Statistics for (a) Derrick and (b) Derrick + Skid Base ............. 139
(TLP with 0 Degrees) .................................................................................................. 139
Table 4-2 Wind Force on Derrick and Skid Base (SEMI with 0 Degrees).................... 140
Fig 4-6 Surge Wind Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0
Degrees) ..................................................................................................................... 140
Fig 4-7 Heave Wind Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0
Degrees) ..................................................................................................................... 141
Table 4-3 Wind Force Statistics for (a) Derrick and (b) Derrick + Skid Base (TLP with 0
Degrees) ..................................................................................................................... 141
Fig 4-8 Surge Gravity Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0
Degrees) ..................................................................................................................... 141
Fig 4-9 Heave Gravity Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0
Degrees) ..................................................................................................................... 142
Table 4-4 Gravity Force Statistics for (a) Derrick and (b) Derrick + Skid Base............ 142
(SPAR with 0 Degrees) ............................................................................................... 142
Fig 4-10 Surge Total Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0
Degrees) ..................................................................................................................... 142
Fig 4-11 Heave Total Force for (a) Derrick and (b) Derrick + Skid Base (SEMI with 0
Degrees) ..................................................................................................................... 143
Table 4-5 Total Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SEMI with 0
Degrees) ..................................................................................................................... 143
Fig 4-12 (a) Surge Reaction (b) Heave Reaction on Footing 1 (SEMI with 0 Degrees)
.................................................................................................................................... 144
Fig 4-13 (a) Surge Reaction (b) Heave Reaction on Footing 2 (SEMI with 0 Degrees)
.................................................................................................................................... 144
Fig 4-14 (a) Surge Reaction (b) Heave Reaction on Footing 3 (SEMI with 0 Degrees)
.................................................................................................................................... 144
Fig 4-15 (a) Surge Reaction (b) Heave Reaction on Footing 4 (SEMI with 0 Degrees)
.................................................................................................................................... 145
Table 4-6 Derrick Reaction Force Statistics (SEMI with 0 Degrees) ........................... 145
64
Fig 4-16 (a) Surge Reaction (b) Heave Reaction on Footing 5 (SEMI with 0 Degrees)
.................................................................................................................................... 146
Fig 4-17 (a) Surge Reaction (b) Heave Reaction on Footing 6 (SEMI with 0 Degrees)
.................................................................................................................................... 146
Fig 4-18 (a) Surge Reaction (b) Heave Reaction on Footing 7 (SEMI with 0 Degrees)
.................................................................................................................................... 146
Fig 4-19 (a) Surge Reaction (b) Heave Reaction on Footing 8 (SEMI with 0 Degrees)
.................................................................................................................................... 147
Table 4-7 Skid Base Reaction Force Statistics (SEMI with 0 Degrees)....................... 147
Table 4-8 Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SEMI with 0
Degrees) ..................................................................................................................... 148
Table 4-9 Reaction Force Statistics (SEMI with 0 Degrees)........................................ 149
Table 4-10 Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SEMI with 0
Degrees) ..................................................................................................................... 150
Table 4-11 Reaction Force Statistics (SEMI with 0 Degrees)...................................... 151
Fig 4-20 Mean Surge Reaction Force (SEMI with 0 Degrees) .................................... 152
Fig 4-21 Mean Heave Reaction Force (SEMI with 0 Degrees).................................... 152
Fig 5-1 (a) Surge and (b) Heave Inertia Force ............................................................ 153
Fig 5-2 (a) Surge and (b) Heave Wind Force .............................................................. 153
Fig 5-3 (a) Surge and (b) Heave Gravity Force ........................................................... 154
Fig 5-4 (a) Surge and (b) Heave Total Force .............................................................. 154
Fig 5-5 (a) Surge and (b) Heave Reaction Force at Node 1........................................ 155
Fig 5-6 (a) Surge and (b) Heave Reaction Force at Node 2........................................ 155
Fig 5-7 (a) Surge and (b) Heave Reaction Force at Node 3........................................ 155
Fig 5-8 (a) Surge and (b) Heave Reaction Force at Node 4........................................ 156
Fig 5-9 TLP Derrick Uplift Force .................................................................................. 156
Fig 5-10 SPAR Derrick Uplift Force............................................................................. 157
Fig 5-11 SEMI Derrick Uplift Force.............................................................................. 157
Fig 5-12 TLP Skid Base Uplift Force ........................................................................... 158
Fig 5-13 SPAR Skid Base Uplift Force ........................................................................ 158
Fig 5-14 SEMI Skid Base Uplift Force ......................................................................... 159
Fig 5-15 TLP Skid Base Surge Reaction Component ................................................. 159
Fig 5-16 SPAR Skid Base Surge Reaction Component .............................................. 160
Fig 5-17 SEMI Skid Base Surge Reaction Component ............................................... 160
Fig 5-18 TLP Skid Base Sway Reaction Component .................................................. 161
Fig 5-19 SPAR Skid Base Sway Reaction Component ............................................... 161
Fig 5-20 SEMI Skid Base Sway Reaction Component ................................................ 162
Fig 6-1 Simple Support Beam Model........................................................................... 163
Fig 6-2 Derrick of Centered Position ........................................................................... 165
Table 6-1 Skid Base Uplift Force of Case 1 (SPAR, Lightship Condition) ................... 165
Fig 6-3 Derrick of Off-Centered Position to Lee Side .................................................. 166
Table 6-2 Skid Base Uplift Force of Case 2 (SPAR, Lightship Condition) ................... 167
Fig 6-4 Derrick of Off-Centered Position to Weather Side........................................... 167
Table 6-3 Skid Base Reaction Force of Case 3 (SPAR with 90 Degrees)................... 168
Table 6-4 Comparison of Maximum Uplift Force ......................................................... 168
Fig 6-5 Lateral Force Components (TLP).................................................................... 169
65
Fig 6-6 Lateral Force Components (SPAR)................................................................. 170
Fig 6-7 Vertical Force Components (TLP)................................................................... 171
Fig 6-8 Vertical Force Components (SPAR)................................................................ 171
Table 6-5 Total Force Cases (SPAR Derrick, 45 degrees, 100-year condition) .......... 172
Fig 6-9 Total Friction Force (red, upper) and Total Horizontal Slip Force (blue, lower)174
(TLP 90-deg case, 100-year condition) ....................................................................... 174
Fig 6-10 Local friction forces at the weather-side footing (#1) and lee-side footing (#4)
.................................................................................................................................... 175
Fig 6-11 Local Total Friction Force (red, upper) and Total Horizontal Slip Force (blue,
lower) .......................................................................................................................... 176
(TLP 90-deg case, 100-year condition) with the effects of sudden drop of friction
capacity ....................................................................................................................... 176
due to instant slip at weather-side footing. .................................................................. 176
Fig 6-12 Total Friction Force (red, upper) and............................................................. 177
Total Horizontal Slip Force (blue, lower) ..................................................................... 177
(spar 90-deg case, 100-year condition) (27 Instant slips)............................................ 177
Fig 6-13 Total Friction Force (red, upper) and Total Horizontal Slip Force (blue, lower)
.................................................................................................................................... 177
(spar 90-deg case, 100-year condition) with the effects of sudden drop of friction
capacity ....................................................................................................................... 177
due to instant slip at weather-side footing. (78 Instant slips) ....................................... 177
66
DYNAMIC LOAD ANALYSIS ON TIE-DOWN SYSTEMS
Problem Description
The problem being analyzed is the reaction force on derrick and skid base
footings. Firstly, hydrodynamic coefficient is determined either by integrating the
boundary element of submerged structures of interest or by the geometry itself in
frequency domain. The external stiffness due to tendon and riser should be also
considered to ensure a more reliable result. All of these procedures are carried out by
the second-order diffraction/radiation program WAMIT. For simplicity, wave excitation
forces in the present study are calculated up to first order and mean drift force is
employed using Newman’s approximation method.
The corresponding forces calculated by WAMIT are converted to the time domain
using two-term Volterra series expansion (Ran and Kim, 1997). Translational and
rotational motions of each structure can be analyzed using 3 hour time domain
simulation. The analysis tool of coupled hull, mooring and riser system, CHARM3D is
employed to find time history of structures. By utilizing hydrodynamic coefficient which is
previously calculated by WAMIT, CHARM3D carries out time domain analysis to obtain
the dynamic responses of the coupled system.
Subsequently, the reaction force calculation on the footings is done by dynamic
and static force equilibrium relation under the assumption that the derrick and skid base
are rigid body. The reaction force at each footing can be separately considered as
longitudinal, lateral, and uplift reaction forces in order to provide design engineers with
information about various possibilities of failure mode. In this study, simulations of loads
67
on a tie-down system on three types of platforms, TLP, SPAR and SEMI, are conducted
for hurricane environmental conditions by using a newly developed dynamic analysis
tool in the time domain (Yang, 2009).
Numerical Modeling of TLP
The particulars of the TLP used for this study is given in Kim et al, (2001) and
Yang (2009). The principal dimensions of TLP are shown in Table 2-1. Both of systems
are located in 3000ft depth Sea.
Table 0-1 Principal Dimensions
Description
Magnitude
Water Depth
3000 ft
Number of Column
4
Column Cross Section Diameter
54 ft
Column Center to Center Distance
200 ft
Column Freeboard
67 ft
Pontoon Breadth
27 ft
Pontoon Height
24 ft
Height of Deck Bottom from MWL
75 ft
Deck Height
45 ft
The origin of body fixed frame is located at the geometric center of four water
plane areas, and the direction of positive X would be 180 degrees of incident wave
angle direction. TLP has eight vertical tendons (two tendons for each column), one
drilling riser, and seven production risers. Risers are connected to the hull by hydraulic
pneumatic tensioners and modeled as they should be. Figure 1-1 shows the shape of
the hull. Total displacement of the hull is 70,426 kips and total tendon pretension at the
68
top is 15,520 kips. Total riser pretension at the top is 4,348 kips. The load condition of
hull is tabulated in Table 1-2. Submerged volume of TLP is modeled using cylinder and
rectangular box approximately, and hull is discretized into 1420 rectangular panels.
Fig 0-1 Configuration of TLP Hull
Table 0-2 TLP Hull Load Condition
Description
Magnitude
Draft (ft)
80.0
Total Weight (kips)
50,558
Tendon Pretension at the Top (kips)
15,520
Riser Pretension at the Top (kips)
4,348
Displacements (kips)
70,426
Vertical Center of Gravity from MWL (ft)
Vertical Center of Buoyancy from MWL
(ft)
Roll Radius of Gyration (ft)
28.1
108.9
Pitch Radius of Gyration (ft)
108.9
-49.8
69
Table 0-2 Continued
Description
Magnitude
Yaw Radius of Gyration (ft)
106.3
Wind Load Coefficient (kips/(ft/sec)2)
0.0665
Center of Pressure from MWL (ft)
125.0
Total wind force on the structure above MWL can be calculated using wind load
coefficient. C eff Fw / V102 0.0665 . The center of pressure is located above 125ft from
MWL, and V10 stands for 1 hour averaged wind velocity above 10m height above MWL.
Figure 1-2 shows the distribution of panels on the body surface of TLP. The line
properties of each tendon and riser are tabulated in Table 1-3.
Fig 0-2 Mesh Generation of the TLP
Table 0-3 Mooring Lines Specification
Line
No.
Top Tension
(kips)
Axial Stiffness
(kips)
Tendon
8
1940
3.76E+06
Drilling Riser
1
729
2.21E+06
Production Riser
7
517
9.75E+05
70
Numerical Modeling of SPAR
The SPAR analyzed in this study is a classic SPAR which has a length of 705ft
and diameter of 122 ft, as shown in Figure 1-3. This SPAR platform consists of 14
mooring lines and 23 risers. Each of the mooring line and riser connections is modeled
as a spring with large stiffness. The connection node between riser and hull is modeled
as a horizontal spring so as to make vertical motion of SPAR free. The details of SPAR
and principal dimensions are tabulated in Tables 1-4 and 1-5.
Fig 0-3 Configuration of SPAR Hull and Mooring/Riser
71
Table 0-4 Principal Particulars of the SPAR Platform
Description
Magnitude
Displacement (m.ton)
53,600
Total Displacement (m.ton)
220,740
Diameter (ft)
122
Length (ft)
705
Draft (ft)
650
Hard Tank Depth (ft)
220
Well Bay Dimensions (25 slots) (ft)
58 58
KB (ft)
540
KG (ft)
412
KG (Based on Total Displacement) (ft)
Radius of Gyration (Based on Total
Displacement) (ft)
Drag Force Coefficient
293
Pitch = 221, Yaw = 28.5
Wind Force Coefficient (kips/(ft/sec)2)
0.0848
Center of Pressure (ft)
722
1.15
Table 0-5 Mooring and Riser System Characteristics
Line
Axial Stiffness
(kips)
No.
Top Tension (kips)
14
680
Drilling Riser
1
735
2.70E+06
Production Riser
18
473
6.73E+05
Water Injection
2
306
4.13E+05
Oil Export
1
400
1.04E+06
Gas Export
1
200
1.04E+06
Chain
Wire
2.98E+05
3.66E+05
72
Submerged hull is discretized into 1504 rectangular panels so that WAMIT can
calculate hydrodynamic coefficients. Figure 1-4 shows the panel model of submerged
SPAR hull.
Fig 0-4 Mesh Generation of the SPAR
Numerical Modeling of SEMI
The third floating production structure in this research is a dry-tree semi which is
assumed to be located in 10,000ft water depth. The mooring system is 16 line chainpoly-chain system. The detail of SEMI and principal dimensions are tabulated below.
Table 0-6 Principal Particulars of the SEMI Platform
Description
Magnitude
Risers
15 TTRs & 3 SCRs
Water depth (ft)
10,000
Mooring system
Chain-Polyester-Chain
Draft (ft)
120
Column c-c distance (ft)
245
73
Table 0-6 Continued
Description
Magnitude
Column width (ft)
58
Column corner radii (ft)
8
Column height (ft)
175
Pontoon width (ft)
58
Pontoon height (ft)
29
Air-gap
65
Displacement (short ton)
91,224
Moon pool size (ft)
67 x 67
Submerged hull is discretized into 1260 rectangular panels so that WAMIT can
calculate hydrodynamic coefficients. Figure 1-5 shows the panel model of submerged
SEMI hull.
Fig 0-5 Mesh Generation of the SEMI
74
Table 0-7 Principal Particulars of the SEMI Platform
Description
Magnitude
Chain size (mm)
138.0
Polyester Rope size (mm)
231.0
Chain breaking strength (kN)
13,878
Rope breaking strength (kN)
15,696
Top chain length (m)
200
Middle segment length (m)
4,000
Bottom chain length (m)
200
Horizontal distance to anchor (m)
3,251
Pretension (kN)
3,301
Total 16 mooring lines are divided by 4 groups and arranged as shown in Figures
1-6 and 1-7.
Fig 0-6 Top View of Mooring Lines of SEMI
75
Fig 0-7 Side View of Mooring Lines of SEMI
Configurations of Derrick AA
In this study, medium size derrick and skid base are mounted at the center of the
deck and they are designed to move in longitudinal and lateral directions. The size of
the derrick is greatly increased compared with the derrick adopted by previous research
therefore, the wind force exerted on the derrick will be increased. Center of gravity of
the derrick is located at 105 ft from the deck, and center of gravity of skid base is
located at 5 ft from the deck. The location of CG from the MWL plays an important role
in calculating the overturning moment of derrick, so it should be calculated with care.
Details of its dimension and weight are presented in Figure 1-8.
76
245’
Upper Deck
160’
Derrick CG
105’
Lower Deck
CG
CG
75’
Drill floor
60’
Substructur
10’
Skid
Skid
Base
0’
Fig 0-8 Derrick Structure General Arrangement
The center of gravity and center of pressure should be calculated individually
from derrick and derrick with skid base, because the derrick itself will only contribute to
the reaction of derrick footing and total weight will affect the reaction of skid base. The
detail of CG and CP is tabulated in Table 1-8. The vertical location of derrick is different
from each floating structure due to the structural difference between TLP, SPAR and
SEMI. For TLP, the derrick is located 200ft from MWL and 140ft for SPAR and SEMI.
For this reason, external wind force on TLP derrick is stronger than that on SPAR and
SEMI derrick. The projected area should be also carefully calculated in order to get
proper wind force of various wind directions. Table 1-9 shows the maximum projected
area.
77
Table 0-8 Center of Pressure and Center of Gravity
TLP
Description
SPAR, SEMI
Derrick
Derrick
+ Skid Base
Derrick
Derrick
+Skid Base
Weight (kips)
1777
2347
1777
2347
COP from MWL (ft)
313
306
254
247
COP from each footings (ft)
103
106
104
107
CG from MWL (ft)
305
280.7
245
220.7
CG from each footings (ft)
95
80.7
95
80.7
Deck level from MWL (ft)
200
140
Table 0-9 Projected Area in Different Projected Angles
Angle
0 deg
21.25 deg
45 deg
90 deg
Upper derrick (ft2)
2805
3631
3995
2805
Lower derrick (ft2)
2975
3851
4165
2975
Drill floor (ft2)
750
971
1065
750
Substructure (ft2)
2500
3236
3550
2500
9030
11689
12775
9030
Skid Base (ft2)
1000
1077
990
400
Derrick + Skid Base Total (ft2)
10030
12766
13765
9030
Derrick Total (ft2)
Maximum projected area of derrick is 12,775 ft2 and maximum projected area of
total structure is 13,765 ft2 with incident angle of 45 degree. The projected area of skid
base is considered maximum at 21.25 degree of incident angle, but the total area is still
less than that of 45 degree incident angle case.
The derrick is supported by 4 footings, and the skid base is also supported by 4
footings. The node location and reference numbers are shown in Figure 1-9. The upper
78
structures are able to move along the y-direction and the distance between footings is
35ft. Skid base, which has rectangular positioned footings of 35ft by 90ft, can move
along the x-direction. In this study, the derrick is assumed to be located at the center of
floating structures for simplicity.
180'
35'
8
7
Deck Beam
45°
4
3
y
Derrick
z
35'
x
Footings
Footings for Skid
Base Unit
90'
Footings for Derrick + Drill
Floor + Substructure Unit
y’
1
2
5
6
Deck Beam
x’
Fig 0-9 Derrick and Skid Base Footings
The radius of gyrations of derrick and skid base should be approximated to get a
rotational moment of inertia. Simplified model for derrick which consists of rectangular
cubic is used to calculate rotational moment of inertia as shown in Figure 1-10. The
derrick and skid base are assumed to be homogeneous material for calculation.
79
200’
190’
CG
CG
95’
80.7’
35’
z
y
x
35’
10’
35’
Fig 0-10 Simplified Model for Radius of Gyration Calculation
- Radius of Gyration of Derrick
Locate the origin of coordinate axis on the bottom center of derrick, and let the
mass of derrick be M, and radius of gyration of each axis be Rx , R y and R z . Then,
rotational moment of inertia with respect to center of gravity would be:
X – axis : I x
1
M (35 2 190 2 ) MRx2
12
Y – axis : I y
1
M (35 2 190 2 ) MR y2
12
Z – axis : I z
1
M (35 2 35 2 ) MR z2
12
Thus, Rx , R y , Rz 55,55,14
Due to the derrick’s tall-rectangular shape, the radius of gyration of x and y
components are much greater than their z component.
- Radius of Gyration of Derrick + Skid Base
80
The center of gravity of derrick + skid base is located at 80.7ft high above bottom
of skid base. The moment of inertia of total structure is calculated by taking the moment
of inertia of each cubic and applying parallel axis theorem to get the total moment of
inertia for derrick and skid base. The offset distance from center of gravity to derrick is
24.3ft and to skid base is 75.7ft. The mass of skid base M 1 is 570 kips and derrick M 2
is 1777 kips.
X – axis :
Ix
1
1
M 1 (90 2 10 2 ) M 1 (75.7 2 ) M 2 (35 2 190 2 ) M 2 (24.32 ) ( M 1 M 2 ) Rx2
12
12
Y – axis :
Iy
1
1
M 1 (35 2 10 2 ) M 1 (75.7 2 ) M 2 (35 2 190 2 ) M 2 (24.32 ) ( M 1 M 2 ) R y2
12
12
Z – axis : I z
1
1
M 1 (35 2 90 2 ) M 2 (35 2 35 2 ) ( M 1 M 2 ) R z2
12
12
Thus, Rx , R y , Rz 66,65,18
The radius of gyration of y component is slightly less than x component, because
the longer length of skid base has a negative effect on the rotation of total structures,
especially for the rotation along the x axis.
Configurations of Derrick AS
The second derrick for this study has somewhat different configurations
compared with derrick AA. The most distinct differences between Derrick AA and
Derrick AS are the location of footings and the weight distribution of derrick and
substructure. As we can see in Figure 1-11. the upper derrick, lower derrick and drill
81
floor are regarded as a derrick and its footings are at the bottom of the drill floor. The
other footings are located under the substructure which is heavier than the derrick.
225’
Upper Deck
140’
Derrick CG
120’
Lower Deck
CG
CG
55’
Drill floor
40’
Substructur
20’
Substructure
0’
Fig 0-11 Derrick Structure General Arrangement
The center of gravity and center of pressure should be calculated individually
from derrick and derrick with skid base, because the derrick itself will only contribute to
the reaction of derrick footing and total weight will affect the reaction of skid base. The
detail of CG and CP is tabulated in Table 1-10. The projected area should be also
carefully calculated in order to get proper wind force of various wind directions. Table 111 shows the maximum projected area.
82
Table 0-10 Center of Pressure and Center of Gravity
SPAR
Description
Derrick
Derrick
+ Substructure
Weight (kips)
1500
3500
COP from MWL (ft)
282
229
COP from each footings (ft)
102
89
CG from MWL (ft)
260
202.85
CG from each footings (ft)
80
62.85
Deck level from MWL (ft)
140
Table 0-11 Projected Area in Different Projected Angles
Angle
0 deg
21.25 deg
45 deg
90 deg
Upper derrick (ft2)
2805
3631
3995
2805
Lower derrick (ft2)
2975
3851
4165
2975
Drill floor (ft2)
750
971
1065
750
6530
8453
9225
6530
Substructure (ft2)
4000
4453
4243
2000
Derrick + Substructure Total (ft2)
10530
12906
13468
8530
Derrick Total (ft2)
Maximum projected area of derrick is 9,225 ft2 and maximum projected area of
total structure is 13,468 ft2 with incident angle of 45 degree. The projected area of skid
base is considered maximum at 21.25 degree of incident angle, but the total area is still
less than that of 45 degree incident angle case.
The derrick is supported by 4 footings, and the skid base is also supported by 4
footings. The node location and reference numbers are shown in Figure 1-12. The
83
upper structures are able to move along the y-direction and the distance between
footings is 50ft. Substructure, which has rectangular positioned footings of 50ft by 100ft,
can move along the x-direction. In this study, the derrick is assumed to be located at the
center of floating structures for simplicity.
50'
8
7
Deck Beam
45°
4
3
y
Derrick
z
50'
x
Footings
Footings for Substructure Unit
100'
Footings for Derrick + Drill
Floor Unit
y’
1
2
5
6
Deck Beam
x’
Fig 0-12 Derrick and Skid Base Footings
The radius of gyrations of derrick and skid base should be approximated to get a
rotational moment of inertia. Simplified model for derrick which consists of rectangular
cubic is used to calculate rotational moment of inertia as shown in Figure 1-13. The
derrick and skid base are assumed to be homogeneous material for calculation.
84
200’
185’
CG
80’
CG
35’
z
62.85’
y
x
35’
40’
50’
Fig 0-13 Simplified Model for Radius of Gyration Calculation
- Radius of Gyration of Derrick
Locate the origin of coordinate axis on the bottom center of derrick, and let the
mass of derrick be M, and radius of gyration of each axis be Rx , R y and Rz . Then,
rotational moment of inertia with respect to center of gravity would be:
X – axis : I x
1
M (352 1852 ) MRx2
12
Y – axis : I y
1
M (352 1852 ) MRy2
12
Z – axis : I z
1
M (35 2 35 2 ) MRz2
12
Thus, Rx , R y , Rz 55,55,14
Due to the derrick’s tall-rectangular shape, the radius of gyration of x and y
components are much greater than their z component.
- Radius of Gyration of Derrick + Skid Base
85
The center of gravity of derrick + skid base is located at 80.7ft high above bottom
of skid base. The moment of inertia of total structure is calculated by taking the moment
of inertia of each cubic and applying parallel axis theorem to get the total moment of
inertia for derrick and skid base. The offset distance from center of gravity to derrick is
24.3ft and to skid base is 75.7ft. The mass of skid base M 1 is 570 kips and derrick M 2
is 1777 kips.
X – axis :
Ix
1
1
M 1 (100 2 40 2 ) M 1 (42.85 2 ) M 2 (35 2 185 2 ) M 2 (57.15 2 ) ( M 1 M 2 ) Rx2
12
12
Y – axis :
Iy
1
1
M 1 (50 2 40 2 ) M 1 (42.85 2 ) M 2 (35 2 185 2 ) M 2 (57.15 2 ) ( M 1 M 2 ) R y2
12
12
Z – axis : I z
1
1
M 1 (50 2 100 2 ) M 2 (35 2 35 2 ) ( M 1 M 2 ) Rz2
12
12
Thus, Rx , R y , Rz 65,63,26
The radius of gyration of y component is slightly less than x component, because
the longer length of skid base has a negative effect on the rotation of total structures,
especially for the rotation along the x axis.
Environmental Condition
The environmental condition, which is one of the input parameters of this study,
is provided by API Bulletin 2INT-MET (2007). To generate long crested irregular random
waves, the JONSWAP spectrum is employed in this analysis with stiffness parameter of
2.4. Time-varying wind speed series is generated for 3hours using API wind spectrum.
86
Wind, wave and current are propagating to the same direction, so only collinear case is
considered for simplicity. Two incident angles, 0 degree and 45 degrees are used for
analysis. Table 1-12 shows the environmental conditions for 100, 200 and 1000-year
return period hurricane events at central area of Gulf of Mexico.
Table 0-12 Environmental Conditions
Return Period
100 year
200 year
1000 year
Hs (ft)
51.8
54.1
65
Tp (sec)
15.4
15.7
17.2
γ
2.4
2.4
2.4
1-hour Mean
Wind Speed
(ft/sec)
157.5
167.3
196.9
Current Profile
Depth
(ft)
Speed
(ft/sec)
Depth
(ft)
Speed
(ft/sec)
Depth
(ft)
Speed
(ft/sec)
0.0
7.9
0.0
8.4
0.0
9.8
-165.5
5.9
-175.5
6.3
-206.5
7.4
-331.0
0
-351.0
0
-413.0
0
-3000
0
-3000
0
-3000
0
Figure 1-14 shows the time history of wave elevation for each return period. 3hour random wave is generated by CHARM3D and wave spectrum of the generated
wave is compared with JONSWAP wave spectrum. The spectral density of random
wave for hurricane conditions shows a good agreement between simulated data and
target wave spectrum.
87
Wave Elevation Time History
Wave Spectrum
1500
Wave Spectrum
Wave Height(ft)
100
50
0
-50
-100
0
5000
10000
Time(sec)
15000
SIMULATION
JONSWAP
1000
500
0
0
0.2
0.4
0.6
0.8
frequency(rad/sec)
1
(a) Wave elevation for 100-year hurricane case
Wave Elevation Time History
Wave Spectrum
1500
Wave Spectrum
Wave Height(ft)
100
50
0
-50
-100
0
5000
10000
Time(sec)
15000
SIMULATION
JONSWAP
1000
500
0
0
0.2
0.4
0.6
0.8
frequency(rad/sec)
1
(b) Wave elevation for 200-year hurricane case
Wave Spectrum
Wave Elevation Time History
3000
Wave Spectrum
Wave Height(ft)
100
50
0
-50
-100
2000
1000
0
0
5000
10000
Time(sec)
15000
SIMULATION
JONSWAP
0
0.2
0.4
0.6
0.8
frequency(rad/sec)
(c) Wave elevation for 1000-year hurricane case
Fig 0-14 Wave Elevation and Spectrum
1
88
The
wind
force
coefficients
Ceff Fw / V102 0.0665kips /( ft / sec) 2
for
TLP
and
0.0848kips /( ft / sec) 2 for SPAR are used to find total wind force on the floating structures.
Fw stands for the total wind force on hull above MWL and V10 represents 1-hour
averaged wind velocity at 10m height above MWL. Figure 1-15 shows the 3-hour
simulated wind velocity and its spectrum at the height of center of pressure. The API
wind spectrum is adopted in this simulation and it is formulated as follows.
2
U z
3444.8 0
32.8 32.8
S( f )
~ ( 5 / 3n )
1 f n
~
z
f 172 f
32.8
0.45
2/3
U0
32.8
0.75
,
where n 0.468 and
- S ( f )( ft 2 s 2 / Hz ) is the spectral energy density at frequency f (Hz )
- z ( ft ) is the height above sea level
- U 0 ( ft / s ) is the 1-hour mean wind speed at 32.8 ft above sea level.
The 3-sec gust velocity for each hurricane condition is also included in the
random wind velocity series. The design wind speed u ( z , t )( ft / s ) at height z ( ft ) above
sea level for period t t0 3600s is given by:
u ( z , t ) U ( z )[1 0.41I u ( z ) ln(t / t0 )] ,
where the 1-hour mean wind speed U ( z )( ft / s ) at level z is given by:
z
U ( z ) U 0 1 C ln
32.8
C 0.0573 1 0.0457U 0
89
and where the turbulence intensity I u ( z ) at level z is given by
z
I u ( z ) 0.061 0.013U 0
32.8
0.22
,
where U 0 ( ft / s ) is 1-hour average wind speed at 32.8 ft elevation.
Wind Speed
100
50
0
1000
2000
Time(sec)
3000
4000
Wind Spectrum (ft 2 sec)
150
Wind Spectrum (ft 2 sec)
Wind Speed (ft\sec)
200
15000
15000
Wind Spectrum (ft 2 sec)
Wind Spectrum
250
15000
10000
5000
0
0
Wind Speed
Wind Speed (ft\sec)
250
200
150
100
50
0
1000
2000
Time(sec)
3000
4000
Wind Speed (ft\sec)
250
200
150
100
0
1000
2000
Time(sec)
3000
4000
0.5
frequency(rad/sec)
1
Wind Spectrum
Generated
Target
10000
5000
0
0
Wind Speed
300
Generated
Target
0.5
frequency(rad/sec)
1
Wind Spectrum
10000
Generated
Target
5000
0
0
0.5
frequency(rad/sec)
1
Fig 0-15 Wind Speed Time Series and Spectrum (100, 200 and 1000 year condition)
90
The currents profile for 100-year, 200-year, and 1000-year return period
hurricane conditions are depicted in Figure 1-16.
Current Profile (200-year)
Current Profile (1000-year)
0
-500
-500
-500
-1000
-1000
-1000
-1500
Depth(ft)
0
Depth(ft)
Depth(ft)
Current Profile (100-year)
0
-1500
-1500
-2000
-2000
-2000
-2500
-2500
-2500
-3000
0
5
Speed(ft/sec)
10
-3000
0
5
Speed(ft/sec)
10
-3000
0
5
Speed(ft/sec)
Fig 0-16 Current Profile in Hurricane Conditions
Coupled Dynamic Analysis in Time Domain Using CHARM3D
10
91
Added Mass and Damping Coefficient
If a floating body moves in an ocean, hydrodynamic pressure forces and moment
will affect the motion of the body. The hydrodynamic pressure on the body due to the
body motion can be regarded as equivalent increment of body mass. That portion of
mass is an added mass. Added mass and damping coefficient for both TLP and SPAR
are presented in Figures 1-17 and 1-18.
Surge Added Mass
Surge Added Mass
4.2
0.14
Added Mass Coefficient
Added Mass Coefficient
0.16
0.12
0.1
0.08
0.06
0.4
0.6
0.8
1
Wave Frequency(rad/s)
4
3.8
3.6
3.4
3.2
1.2
0.5
Sway Added Mass
Sway Added Mass
4.2
0.14
Added Mass Coefficient
Added Mass Coefficient
0.16
0.12
0.1
0.08
0.06
1
1.5
Wave Frequency(rad/s)
0.4
0.6
0.8
1
Wave Frequency(rad/s)
(a)
1.2
4
3.8
3.6
3.4
3.2
0.5
1
1.5
Wave Frequency(rad/s)
(b)
Fig 0-17 Added Mass Coefficient of (a) TLP and (b) SPAR
92
Heave Added Mass
Heave Added Mass
0.272
Added Mass Coefficient
Added Mass Coefficient
0.1
0.098
0.096
0.094
0.092
0.09
0.4
0.6
0.8
1
Wave Frequency(rad/s)
1.2
0.27
0.268
0.266
0.264
0.262
0.5
(a)
1
1.5
Wave Frequency(rad/s)
(b)
Fig 0-17 Continued
The motion of floating structures will generate the radiation waves and this may
reduce the energy that the structures have. This effect is quantified by damping
coefficient of the structures.
Surge Damping
0.8
0.06
0.6
Damping Coefficient
Damping Coefficient
Surge Damping
0.08
0.04
0.02
0
0.4
0.6
0.8
1
Wave Frequency(rad/s)
(a)
1.2
0.4
0.2
0
0.5
1
1.5
Wave Frequency(rad/s)
(b)
Fig 0-18 Damping Coefficient of (a) TLP and (b) SPAR
93
Sway Damping
Sway Damping
0.8
0.06
Damping Coefficient
Damping Coefficient
0.08
0.04
0.02
0
0.4
0.6
0.8
1
Wave Frequency(rad/s)
-3
0.4
0.2
0
1.2
0.5
1
1.5
Wave Frequency(rad/s)
-3
Heave Damping
x 10
6
Heave Damping
x 10
5
Damping Coefficient
Damping Coefficient
6
0.6
4
3
2
1
0
0.4
0.6
0.8
1
Wave Frequency(rad/s)
1.2
4
2
0
-2
0.5
1
1.5
Wave Frequency(rad/s)
(a)
(b)
Fig 0-18 Continued
Forces on Derrick and Skid Base
Once hydrodynamic coefficients are calculated, time domain analysis should be
carried out. Only the first order of wave force is implemented and second order sum
frequency wave force is neglected. The second order difference frequency wave force
can be approximately included by Newman’s approximation method. The hydrodynamic
94
coefficient from WAMIT output is converted into CHARM3D input using the interface
software WAMPOST. The mooring lines and risers of the TLP and SPAR are modeled
so that we get a more realistic motion of each system.
- Inertia Force
The 3-hour simulation result (such as displacement, velocity, and acceleration of
hull structures) is utilized to get the 3-dimensional components of inertia force and
gravitational force for derrick and skid base. The derrick or skid base motion can be
derived by relative velocity and acceleration dynamics technique because the relative
displacement between hull origin and derrick origin makes the derrick motion different.
b3
P
rP / B
rP
B
a3
rB
b2
b1
a2
O
a1
Fig 0-19 Two Reference Frames
Figure 1-19 shows the two different frames O and B, where O frame represents
global reference frame and B frame represents body fixed frame. The point P in the
frame B can be represented as
rp rB rP / B
The subscript P/B represents the point P measured from the frame B. By
differentiating the displacement of P, we can get the velocity of point P.
95
vP vB vP / B
The expression for the relative velocity vP / B would be
vP / B vP / Brel rP / B
If point P is fixed in frame B, then the relative velocity vP / Brel is zero. Since the
derrick is fixed structure on hull, we can regard vP / Brel as zero in this analysis. Thus, we
obtain the relative velocity expression, written as
vP v B v P / B v B rP / B
where, v B is the velocity of hull and omega is the angular velocity of Hull respectively.
To find the acceleration of point P, we have to differentiate eq. once more, then
aP aB
d
( rP / B )
dt
The second term can be differentiated using transport theorem with the result,
d
( rP / B ) rP / B v P / B ( rP / B )
dt
Substitute v P / Brel with zero, and the acceleration of point P with respect to global
reference frame would be
a P a B rP / B ( rP / B )
The term rP / B is due to the angular acceleration of the rotating frame, while
( rP / B ) is the centripetal acceleration of point P. There is no coriolis acceleration
because point P is fixed in the frame B.
96
- Gravity Force
If the derrick or skid base is in static condition, then vertical component of gravity
force is the only force which is exerted on the footings. However, continuous
translational and rotational motion of structure will generate horizontal component of
gravity force as well.
- Wind Force
The wind force is calculated by wind force coefficient and square of wind velocity
at the center of pressure as the formula below.
Fwind
1
air C shape C perm Aprojected Vz2
2
where, air is density of air and 0.0023668 ( slug / ft 3 ) is used. C shape is the shape
coefficient of each member. C perm is perm factor and it represents an estimated
measure of the total projected areas of all the members in an area to the total area.
Aprojected is the projected area of structures and Vz is local wind velocity in ft / sec .
The wind force expressed in the global coordinate system should be transformed
to body fixed coordinate of derrick.
Total force on the derrick is a summation of these three force components;
inertia, gravity and wind. In the following section of case study, the directions of each
force are expressed as surge, sway and heave which represent X, Y and Z directions in
body fixed coordinate.
97
Reaction Forces on the Footings
The reaction force on the footings of derrick or skid base can be calculated from
the force and moment equilibrium. If we assume that the derrick is a rigid body, then
reaction force at each direction can be calculated as follows. In general, lateral reaction
force is mostly occurred by horizontal force such as wind force and inertia force, but
vertical uplift reaction force is caused by vertical force like gravity force and overturning
moment due to horizontal forces. The reaction force for derrick and skid base will be
separately considered, and these reaction forces are also simulated during 3-hour
simulation period. Design engineer should take maximum and minimum reaction forces
into consideration to guarantee proper stability of structures.
-
Reaction Force of X and Y Direction
FY
Rxy
Rx
Rx
Ry
Ry
b
Rxy
FX
Rx
MZ
Rx
Ry
Rxy
Ry
a
Fig 0-20 Horizontal Reaction Forces
Rxy
98
The reaction force of x-direction consists of the external force of x direction and
external moment of z direction as shown in Figure 1-20. The force and moment
equilibrium can be expressed by
FX 4 Rx 0
FY 4 R y 0
M Z 4 Rxy a 2 b 2 0
Thus, the reaction forces Rx , R y , and Rxy will be
Rx
FX
4
Ry
FY
4
Rxy
MZ
4 a 2 b2
Total reaction force of each footing would be
Point
: R1x Rx Rxy
Point
: R2 x Rx Rxy
Point
: R3 x Rx Rxy
Point
: R4 x Rx Rxy
b
a b
2
2
b
a b
2
2
b
a b
2
2
b
a b
2
2
FX
b MZ
4 4(a 2 b 2 )
FX
b MZ
4 4(a 2 b 2 )
FX
b MZ
4 4(a 2 b 2 )
FX
b MZ
4 4(a 2 b 2 )
Similarly, the reaction force of y direction can be calculated as follows
Point
: R1 y Ry Rxy
a
a b
2
2
FY
a MZ
4 4(a 2 b 2 )
99
Point
: R2 y Ry Rxy
Point
: R3 y Ry Rxy
Point
: R4 y Ry Rxy
-
a
a 2 b2
a
a2 b2
a
a 2 b2
FY
a MZ
4 4(a 2 b 2 )
FY
a MZ
4 4(a 2 b 2 )
FY
a MZ
4 4(a 2 b 2 )
Reaction Force of Z Direction
The reaction force of z direction consists of external force on the vertical direction
and overturning moment along x and y directions as shown in Figure 1-21.
FZ
MY
Rz
Rz
Rmy
MX
Rmy
Rmx
a
Rmx
b
Fig 0-21 Vertical Reaction Forces
The force and moment equilibrium of vertical direction is
FZ 4 RZ 0
M Y 4aRmy 0
100
M X 4bRmx 0
Thus,
FZ
4
RZ
Rmy
MY
4a
Rmx
MX
4b
Total reaction force of vertical direction would be
Point
: R1z Rz Rmy Rmx
FZ M Y M X
4
4a
4b
Point
: R2 z Rz Rmy Rmx
FZ M Y M X
4
4a
4b
Point
: R3 z Rz Rmy Rmx
FZ M Y M X
4
4a
4b
Point
: R4 z Rz Rmy Rmx
FZ M Y M X
4
4a
4b
All calculations are conducted by the motion information of hull structures and
wind velocity time history. Engineering mathematical software MATLAB is used to
calculate 3-hour external force and reaction force simulation.
101
CASE 1. TLP (3000FT) WITH DERRICK AA – 0 DEGREE CASE
TLP Motion Time History
In this case, the reaction force on derrick footings and skid base footings for TLP
will be analyzed. Wind, wave and current are coming from the 0 degree incident angle.
The TLP motion time series for 100-year, 200-year and 1000-year hurricane conditions
will be presented. Figures 2-1 to 2-3 show the 3-hour simulation result of TLP motion
and its spectral density for 100-year hurricane condition.
4
Motion
500
x 10
4
400
S()
Motion(ft)
3
300
200
100
2
1
0
-100
0
2000
4000 6000 8000 10000 12000
Time(sec)
0
0
0.2
0.4
0.6
0.8
(rad/sec)
1
Fig 0-1 TLP Surge Motion and Spectrum (0 Degrees)
250
0
200
-10
150
S()
Motion(ft)
Motion
10
-20
-30
-40
100
50
0
2000
4000 6000 8000 10000 12000
Time(sec)
0
0
0.2
0.4
0.6
0.8
(rad/sec)
Fig 0-2 TLP Heave Motion and Spectrum (0 Degrees)
1
102
-6
0.8
8
0.6
6
0.4
S()
Motion(deg)
Motion
x 10
4
0.2
2
0
-0.2
0
0
2000
4000 6000 8000 10000 12000
Time(sec)
0
0.2
0.4
0.6
0.8
1
1.2
(rad/sec)
Fig 0-3 TLP Pitch Motion and Spectrum (0 Degrees)
The spectra of each motion show that the motion of TLP is affected by incident
wave forces and 2nd order difference frequency wave forces which cause slowly varying
motion. Hull motion spectrum shows the distinctly different components of motion.
Inertia Force on Derrick and Skid Base
The inertial force of derrick and skid base are calculated based on the hull
motion, and are summarized in Figures 2-4 to 2-5 and Table 2-1.
500
Inertia Force (kips)
Inertia Force (kips)
500
0
-500
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
0
-500
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-4 Surge Inertia Force of (a) Derrick and (b) Derrick + Skid Base (TLP with 0 Degrees)
103
100
Inertia Force (kips)
Inertia Force (kips)
100
50
0
-50
-100
0
2000
4000 6000 8000 10000 12000
Time (sec)
50
0
-50
-100
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
(b)
Fig 0-5 Heave Inertia Force of (a) Derrick and (b) Derrick + Skid Base (TLP with 0 Degrees)
Most of the surge inertia force comes from the surge motion, and the contribution
of pitch motion for surge inertia force is very small since the pitch motion of TLP is
restricted by tension legs.
Table 0-1 Inertia Force Statistics for (a) Derrick and (b) Derrick + Skid Base
(TLP with 0 Degrees)
Inertia
Surge
Sway
Heave
Inertia
Surge
Sway
Heave
MAX
345
0
61
MAX
455
0
80
MIN
-356
0
-56
MIN
-468
0
-74
0
0
0
0
0
0
MEAN
(a)
MEAN
(b)
Wind Force
The maximum wind force on derrick and skid base is tabulated below. Effective
pressure on Table 2-2 represents one half of multiplication of air density, square of 3sec gust wind velocity, and shape coefficient. Total pressure on the structure can be
104
calculated by multiplying unit pressure by perm factor and projected area. 3-hour time
history of wind force is also depicted in Figures 2-6 to 2-7.
Table 0-2 Wind Force on Derrick and Skid Base (TLP with 0 Degrees)
z elev
above
MWL to
Mid-Point
U(z)
1-hr
ave
Cshape
Effective
Pressur
e
Perm
Factor
Projecte
d Area
Max.
Force
Momen
t
403
222
1.25
125.00
0.6
2805
210
42602
318
216
1.25
121.21
0.6
2975
216
25435
Drill floor
268
212
1.50
142.19
1.0
750
107
7198
Substructur
e
235
208
1.50
139.74
0.6
2500
210
7336
743
82571
137
686
880
83257
100 YEAR
Upper
derrick
Lower
derrick
Derrick
Skid base
205
205
1.50
137.17
1.0
1000
1000
1000
800
800
Wind Force (kips)
Wind Force (kips)
Derrick
+ Skid Base
600
400
200
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
600
400
200
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-6 Surge Wind Force for (a) Derrick and (b) Derrick + Skid Base (TLP with 0 Degrees)
6
6
4
4
Wind Force (kips)
Wind Force (kips)
105
2
0
-2
0
2000
4000 6000 8000
Time (sec)
10000 12000
2
0
-2
0
2000
4000 6000 8000
Time (sec)
(a)
10000 12000
(b)
Fig 0-7 Heave Wind Force for (a) Derrick and (b) Derrick + Skid Base (TLP with 0 Degrees)
The maximum wind forces on derrick and skid base are calculated as 743 kips
and 880 kips respectively in Table 2-2. The statistics of simulated random wind forces
are tabulated in Table 2-3 and the maximum wind forces shown are 765 kips and 905
kips which are slightly higher than estimated maximum wind force.
Table 0-3 Wind Force Statistics for (a) Derrick and (b) Derrick + Skid Base (TLP with 0 Degrees)
Wind
Surge
Sway
Heave
Wind
Surge
Sway
Heave
MAX
765
0
5
MAX
905
0
6
MIN
222
0
0
MIN
259
0
0
MEAN
424
0
1
MEAN
499
0
2
(a)
(b)
Gravity Force
The weight of derrick is 1777 kips and total weight including skid base is 2347
kips. Most of the gravity force is applied on the vertical direction, while horizontal
direction of gravity force comes from hull pitching motion. The pitch and roll motions of
106
TLP are not that big, so gravity force seems to be constant through the whole simulation
time. Mean horizontal component of gravity force of derrick and skid base is 6 kips and
8 kips respectively. These forces are relatively smaller than vertical gravity force and
can be negligible. Figures 2-8 to 2-9 and Table 2-4 show the time history of gravity
25
25
20
20
Gravity Force (kips)
Gravity Force (kips)
force.
15
10
5
0
-5
0
2000
4000 6000 8000
Time (sec)
10000 12000
15
10
5
0
-5
0
2000
(a)
4000 6000 8000
Time (sec)
10000 12000
(b)
Fig 0-8 Surge Gravity Force for (a) Derrick and (b) Derrick + Skid Base (TLP with 0 Degrees)
-1800
Gravity Force (kips)
Gravity Force (kips)
-1800
-2000
-2200
-2400
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
-2000
-2200
-2400
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-9 Heave Gravity Force for (a) Derrick and (b) Derrick + Skid Base (TLP with 0 Degrees)
107
Table 0-4 Gravity Force Statistics for (a) Derrick and (b) Derrick + Skid Base
(TLP with 0 Degrees)
Gravity
Surge
Sway
Heave
Gravity
Surge
Sway
Heave
MAX
19
0
-1777
MAX
25
0
-2347
MIN
0
0
-1777
MIN
0
0
-2347
MEAN
6
0
-1777
MEAN
8
0
-2347
(a)
(b)
Total Force
Total force on the derrick and skid base can be expressed by a summation of
inertia force, wind force and gravity force. The time history of total force and statistics of
1500
1500
1000
1000
Total Force (kips)
Total Force (kips)
force are shown in Figures 2-10, 2-11 and Table 2-5.
500
0
-500
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
500
0
-500
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-10 Surge Total Force for (a) Derrick and (b) Derrick + Skid Base (TLP with 0 Degrees)
108
-2250
Total Force (kips)
Total Force (kips)
-1700
-1750
-1800
-1850
0
2000
4000 6000 8000 10000 12000
Time (sec)
-2300
-2350
-2400
-2450
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
(b)
Fig 0-11 Heave Total Force for (a) Derrick and (b) Derrick + Skid Base (TLP with 0 Degrees)
Table 0-5 Total Force Statistics for (a) Derrick and (b) Derrick + Skid Base (TLP with 0 Degrees)
Total
Surge
Sway
Heave
Total
Surge
Sway
Heave
MAX
869
0
-1715
MAX
1070
0
-2265
MIN
23
-1
-1833
MIN
-10
-1
-2421
MEAN
430
0
-1776
MEAN
507
0
-2345
(a)
(b)
Reaction Force
The reaction forces of each footing are calculated according to the methodology
described in the previous section. The node number for derrick ranges from 1 to 4 and
from 5 to 8 for skid base. The time histories of derrick reaction force of each footing are
listed below.
109
Derrick Reaction Force
The location of derrick footings and node number is shown in Figure 2-12. The
external force including wind, wave, and current is coming from 0 degree of positive xdirection.
y
4
3
Force
x
1
2
Fig 0-12 Direction of Force and Node Location of Derrick
500
-50
Reaction Force (kips)
Reaction Force (kips)
0
-100
-150
-200
-250
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
0
-500
-1000
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-13 (a) Surge Reaction (b) Heave Reaction on Footing 1 (TLP with 0 Degrees)
110
2000
-50
Reaction Force (kips)
Reaction Force (kips)
0
-100
-150
-200
-250
0
2000
4000 6000 8000 10000 12000
Time (sec)
1500
1000
500
0
0
2000
(a)
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-14 (a) Surge Reaction (b) Heave Reaction on Footing 2 (TLP with 0 Degrees)
2000
Reaction Force (kips)
Reaction Force (kips)
0
-50
-100
-150
-200
-250
0
2000
4000 6000 8000 10000 12000
Time (sec)
1500
1000
500
0
0
2000
(a)
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-15 (a) Surge Reaction (b) Heave Reaction on Footing 3 (TLP with 0 Degrees)
500
-50
Reaction Force (kips)
Reaction Force (kips)
0
-100
-150
-200
-250
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
0
-500
-1000
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-16 (a) Surge Reaction (b) Heave Reaction on Footing 4 (TLP with 0 Degrees)
111
The time history of reaction force is shown in Figures 2-13 to 2-16, and the
statistics of reaction force for derrick footings are tabulated in Table 2-6.
Table 0-6 Derrick Reaction Force Statistics (TLP with 0 Degrees)
Node
1
Node
3
Reaction
X
Y
Z
MAX
-6
2
383
MIN
-217
-1
-815
MEAN
-108
0
-188
Reaction
X
Y
Z
MAX
-5
1
1712
MIN
-218
-2
489
MEAN
-108
0
1076
Node
2
Node
4
Reaction
X
Y
Z
MAX
-6
1
1704
MIN
-217
-2
499
MEAN
-108
0
1077
Reaction
X
Y
Z
MAX
-5
2
373
MIN
-218
-1
-807
MEAN
-108
0
-189
The mean reaction force of surge direction is -108 kips for all 4 footings, but the
heave reaction force is -189 kips for node 1 and 4, and 1077 kips for node 2 and 3. This
means that the footings of the upstream location (node 1 and 4) experience a tensile
force and the footings of downstream location (node 2 and 3) experience compression
force.
Skid Base Reaction Force
The skid base footings are not located at the squared position as shown in Figure
2-17 and the mean reaction force would be greater than derrick footing reaction force,
because both weight and projected area are increased.
112
y
8
7
Force
x
6
5
Fig 0-17 Direction of Force and Node Location of Skid Base
1000
Reaction Force (kips)
Reaction Force (kips)
100
0
-100
-200
-300
0
2000
500
0
-500
-1000
4000 6000 8000 10000 12000
Time (sec)
0
2000
(a)
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-18 (a) Surge Reaction (b) Heave Reaction on Footing 5 (TLP with 0 Degrees)
2000
Reaction Force (kips)
Reaction Force (kips)
100
0
-100
-200
-300
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
1500
1000
500
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-19 (a) Surge Reaction (b) Heave Reaction on Footing 6 (TLP with 0 Degrees)
113
2000
Reaction Force (kips)
Reaction Force (kips)
100
0
-100
-200
-300
0
2000
4000 6000 8000 10000 12000
Time (sec)
1500
1000
500
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
(b)
Fig 0-20 (a) Surge Reaction (b) Heave Reaction on Footing 7 (TLP with 0 Degrees)
1000
Reaction Force (kips)
Reaction Force (kips)
100
0
-100
-200
-300
0
2000
4000 6000 8000 10000 12000
Time (sec)
500
0
-500
-1000
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
(b)
Fig 0-21 (a) Surge Reaction (b) Heave Reaction on Footing 8 (TLP with 0 Degrees)
The time history of reaction force is shown in Figures 2-18 to 2-21, and the
statistics of reaction force for derrick footings are tabulated in Table 2-7.
Table 0-7 Skid Base Reaction Force Statistics (TLP with 0 Degrees)
Node
5
Reaction
X
Y
Z
MAX
2
1
527
MIN
-267
-1
-804
MEAN
-127
0
-107
Node
6
Reaction
X
Y
Z
MAX
2
1
1982
MIN
-267
-1
631
MEAN
-127
0
1280
114
Table 0-7 Continued
Node
Reaction
7
X
Y
Z
MAX
3
1
1989
MIN
-268
-1
624
MEAN
-127
0
1279
Node
Reaction
8
X
Y
Z
MAX
3
1
520
MIN
-268
-1
-797
MEAN
-127
0
-107
Footings of upstream location (node 5 and 8) experiences both tensile and
compression force while mean force is tensile force. Mean reaction force of surge
direction is the same for all 4 footings since all external forces are coming from the 0
degree of x-axis.
200-year and 1000-year Hurricane Conditions
Similarly, external forces and reaction forces are calculated in 200-year and
1000-year hurricane conditions. Statistics of each force are tabulated.
200-year Hurricane Condition
Table 2-8 shows the force components of derrick and skid base footings for 200year hurricane condition.
Table 0-8 Force Statistics for (a) Derrick and (b) Derrick + Skid Base (TLP with 0 Degrees)
Inertia
Surge
Sway
Heave
Inertia
Surge
Sway
Heave
MAX
368
0
56
MAX
482
0
73
MIN
-364
0
-57
MIN
-478
0
-75
0
0
0
0
0
0
MEAN
MEAN
115
Table 0-8 Continued
Surge
Wind
Sway
Heave
Surge
Wind
Sway
Heave
MAX
882
0
6
MAX
1044
0
8
MIN
251
0
0
MIN
293
-1
0
MEAN
486
0
2
MEAN
571
0
2
Surge
Gravity
Sway
Heave
Gravity
Surge
Sway
Heave
MAX
21
0
-1777
MAX
27
0
-2347
MIN
0
0
-1777
MIN
0
0
-2347
MEAN
7
0
-1777
MEAN
9
0
-2347
Surge
Total
Sway
Heave
Total
Surge
Sway
Heave
MAX
977
0
-1720
MAX
1194
0
-2272
MIN
40
-1
-1833
MIN
7
-1
-2421
MEAN
493
0
-1775
MEAN
581
0
-2345
(a)
(b)
Since each of the forces such as wind force and inertia force has a different
phase, sum of maximum forces of inertia, wind and gravity is mostly bigger than
maximum of total force. The corresponding reaction force of each position is shown in
Table 2-9.
Table 0-9 Reaction Force Statistics (TLP with 0 Degrees)
Node
1
Reaction
X
Y
Z
MAX
-10
1
355
MIN
-244
-1
-972
MEAN
-123
0
-280
Node
2
Reaction
X
Y
Z
MAX
-10
1
1861
MIN
-244
-1
527
MEAN
-123
0
1168
116
Table 0-9 Continued
Node
Reaction
3
Node
X
Node
-9
1
1871
MIN
-245
-1
518
MEAN
-123
0
1167
X
Y
Z
MAX
-2
1
498
MIN
-298
-1
-977
MEAN
-145
0
-208
Reaction
7
Z
MAX
Reaction
5
Y
X
Y
Z
MAX
-1
1
2164
MIN
-299
-1
655
MEAN
-145
0
1380
Node
Reaction
4
Node
Z
-9
1
346
MIN
-245
-1
-962
MEAN
-123
0
-281
X
Y
Z
MAX
-2
1
2156
MIN
-298
-1
661
MEAN
-145
0
1381
Reaction
8
Y
MAX
Reaction
6
Node
X
X
Y
Z
MAX
-1
1
492
MIN
-299
-1
-969
MEAN
-145
0
-208
1000-year Hurricane Condition
Table 2-10 shows the force components of derrick and skid base footings for
1000-year hurricane condition.
Table 0-10 Force Statistics for (a) Derrick and (b) Derrick + Skid Base (TLP with 0 Degrees)
Inertia
Surge
Sway
Heave
Inertia
Surge
Sway
Heave
MAX
416
0
77
MAX
547
1
102
MIN
-424
0
-72
MIN
-560
0
-95
0
0
0
0
0
0
MEAN
MEAN
117
Table 0-10 Continued
Wind
Surge
Sway
Heave
Surge
Wind
Sway
Heave
MAX
1298
0
14
MAX
1538
0
16
MIN
353
-1
0
MIN
411
-1
0
MEAN
700
0
4
MEAN
824
0
5
Gravity
Surge
Sway
Heave
Gravity
Surge
Sway
Heave
MAX
28
0
-1777
MAX
37
0
-2347
MIN
0
0
-1777
MIN
0
0
-2347
MEAN
10
0
-1777
MEAN
13
0
-2347
Surge
Total
Sway
Heave
Total
Surge
Sway
Heave
MAX
1368
0
-1697
MAX
1666
0
-2241
MIN
159
-1
-1845
MIN
149
-1
-2438
MEAN
710
-1
-1773
MEAN
838
-1
-2342
(a)
(b)
The reaction force of each footing for 1000-year hurricane condition is shown in
Table 2-11.
Table 0-11 Reaction Force Statistics (TLP with 0 Degrees)
Node
1
Reaction
X
Y
Z
MAX
-40
2
174
MIN
-341
-1
-1525
MEAN
-178
0
-600
Node
2
Reaction
X
Y
Z
MAX
-40
2
2426
MIN
-341
-1
693
MEAN
-178
0
1488
118
Table 0-11 Continued
ode
3
Node
5
Node
7
Reaction
X
Y
Z
MAX
-40
2
2436
MIN
-343
-1
688
MEAN
-178
0
1487
Reaction
X
Y
Z
MAX
-38
1
300
MIN
-415
-1
-1588
MEAN
-209
0
-560
Reaction
X
Y
Z
MAX
-37
1
2792
MIN
-418
-1
839
MEAN
-209
0
1731
Node
4
Node
6
Node
8
Reaction
X
Y
Z
MAX
-40
2
170
MIN
-343
-1
-1515
MEAN
-178
0
-602
Reaction
X
Y
Z
MAX
-38
1
2783
MIN
-415
-1
842
MEAN
-209
0
1732
Reaction
X
Y
Z
MAX
-37
1
297
MIN
-418
-1
-1580
MEAN
-209
0
-561
Engineers responsible for derrick design should consider maximum or minimum
reaction force of each footing when they decide the strength of footings. Positive and
negative signs stand for the direction of reaction force. That is to say, maximum of
absolute value of each reaction force is significant. To see the tendency of reaction
force of each footing, mean reaction forces are presented in Figures 2-22 and 2-23.
119
Node 2
Node 3
Node 4
Node 5
0
0
-50
-50
kips
kips
Node 1
-100
-150
Node 6
Node 7
Node 8
-100
-150
-200
-200
-250
100 year
200 year
1000 year
100 year
200 year
1000 year
Fig 0-22 Mean Surge Reaction Force (TLP with 0 Degrees)
Node 2
Node 3
Node 4
Node 5
2000
2000
1500
1000
1500
1000
kips
kips
Node 1
500
0
-500
-1000
Node 6
Node 7
Node 8
500
0
-500
-1000
100 year
200 year
1000 year
100 year
200 year
1000 year
Fig 0-23 Mean Heave Reaction Force (TLP with 0 Degrees)
120
CASE 2. SPAR (3000FT) WITH DERRICK AA – 0 DEGREE
CASE
SPAR Motion Time History
In this case, all other conditions are the same with case 1, but TLP is replaced by
SPAR structure. In general, SPAR is more vulnerable to roll and pitch. So, inertia force
of derrick could be greater than that of TLP. Due to the large inclination angle, gravity
force of surge component could also be bigger than that of TLP. Figures 3-1 to 3-3
show the 3-hour simulation result of SPAR motion and its spectral density for 100-year
hurricane condition.
5000
150
4000
100
3000
S()
Motion(ft)
Motion
200
50
0
-50
2000
1000
0
2000
0
4000 6000 8000 10000 12000
Time(sec)
0
0.2
0.4
0.6
0.8
1
(rad/sec)
Fig 0-1 SPAR Surge Motion and Spectrum (0 Degrees)
Motion
8
2
6
-2
S()
Motion(ft)
0
-4
2
-6
-8
4
0
2000
4000 6000 8000 10000 12000
Time(sec)
0
0
0.2
0.4
0.6
0.8
(rad/sec)
Fig 0-2 SPAR Heave Motion and Spectrum (0 Degrees)
1
1.2
121
-3
4
10
3
S()
Motion(deg)
Motion
15
5
2
1
0
-5
x 10
0
2000
4000 6000 8000 10000 12000
Time(sec)
0
0
0.2
0.4
0.6
0.8
1
(rad/sec)
Fig 0-3 SPAR Pitch Motion and Spectrum (0 Degrees)
Inertia Force of Derrick and Skid Base
Inertia force of SPAR derrick is relatively bigger than that of TLP derrick, because
the rotational motion of SPAR including pitch and roll is more severe. Large inertia force
can contribute to the increase of uplift reaction force, so the SPAR derrick footings will
experience bigger reaction forces compared to TLP derrick footings. The inertial force of
derrick and skid base are calculated based on the hull motion, and are summarized in
800
800
600
600
Inertia Force (kips)
Inertia Force (kips)
Figures 3-4 to 3-5 and Table 3-1.
400
200
0
-200
-400
-600
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
400
200
0
-200
-400
-600
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-4 Surge Inertia Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0 Degrees)
80
80
60
60
Inertia Force (kips)
Inertia Force (kips)
122
40
20
0
-20
-40
-60
0
2000
4000 6000 8000 10000 12000
Time (sec)
40
20
0
-20
-40
-60
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
(b)
Fig 0-5 Heave Inertia Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0 Degrees)
Table 0-1 Inertia Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SPAR with 0 Degrees)
Inertia
Surge
Sway
Heave
Inertia
Surge
Sway
Heave
MAX
546
1
59
MAX
698
1
78
MIN
-451
-1
-45
MIN
-577
-1
-60
0
0
1
0
0
1
MEAN
(a)
MEAN
(b)
Wind Force of Derrick and Skid Base
The derrick and skid base of SPAR is located 140ft above MWL, and for this
reason, derrick wind force of SPAR is less than that of TLP. The wind force on each
component of the derrick and skid base is tabulated below. Maximum wind force of
derrick is 721 kips, while maximum wind force of TLP derrick is 743 kips. Maximum
wind force on derrick including skid base is 852 kips. A detail list of wind force
component is tabulated in Table 3-2.
123
Table 0-2 Wind Force of Derrick and Skid Base (SPAR with 0 Degrees)
z elev
above
MWL to
Mid-Point
U(z)
1-hr
ave
Cshape
Effective
Pressur
e
Perm
Factor
Projecte
d Area
Max.
Force
Momen
t
343
218
1.25
122.41
0.6
2805
206
41719
258
211
1.25
117.89
0.6
2975
210
24739
Drill floor
208
205
1.50
137.40
1.0
750
103
6956
Substructur
e
175
201
1.50
134.22
0.6
2500
201
7047
721
80460
131
654
852
81114
100 YEAR
Upper
derrick
Lower
derrick
Derrick
Skid base
145
196
1.50
130.73
1.0
1000
900
900
800
800
Wind Force (kips)
Wind Force (kips)
Derrick
+ Skid Base
700
600
500
400
300
200
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
700
600
500
400
300
200
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-6 Surge Wind Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0 Degrees)
Heave component of wind force of SPAR is considerably bigger than that of TLP
case, as the large tilted angle of derrick can generate vertical uplift force on derrick.
Compared with TLP case, the maximum heave component of derrick is 93 kips, while it
is 5 kips for TLP. The time history of wind force and statistics of force are shown in
Figures 3-6 to 3-7 and Table 3-3.
120
120
100
100
Wind Force (kips)
Wind Force (kips)
124
80
60
40
20
0
-20
0
2000
4000 6000 8000 10000 12000
Time (sec)
80
60
40
20
0
-20
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
(b)
Fig 0-7 Heave Wind Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0 Degrees)
Table 0-3 Wind Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SPAR with 0 Degrees)
Wind
Surge
Sway
Heave
Wind
Surge
Sway
Heave
MAX
736
1
93
MAX
868
1
109
MIN
203
-1
0
MIN
235
-2
0
MEAN
400
0
31
MEAN
468
0
36
(a)
(b)
Gravity Force
Most of the gravity force on footings is applied in a vertical direction due to its
weight. If the hull is tilted, then horizontal component of gravity force will also rise. For
TLP case, this horizontal component of gravity force is negligible because pitch and roll
of hull is so small. However, horizontal component of gravity force for SPAR is
significant relative to TLP due to large motion of pitch or roll. The maximum surge
component of gravity force of TLP derrick is only 19 kips, but the maximum of SPAR is
335 kips which is comparable to the inertia force of TLP derrick. Figures 3-8 to 3-9 and
Table 3-4 show the time history of gravity force.
125
400
Gravity Force (kips)
Gravity Force (kips)
400
300
200
100
300
200
100
0
0
0
2000
0
4000 6000 8000 10000 12000
Time (sec)
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
(b)
Fig 0-8 Surge Gravity Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0 Degrees)
-1800
Gravity Force (kips)
Gravity Force (kips)
-1800
-2000
-2200
-2400
0
2000
4000 6000 8000 10000 12000
Time (sec)
-2000
-2200
-2400
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
(b)
Fig 0-9 Heave Gravity Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0 Degrees)
Table 0-4 Gravity Force Statistics for (a) Derrick and (b) Derrick + Skid Base
(SPAR with 0 Degrees)
Gravity
Surge
Sway
Heave
Gravity
Surge
Sway
Heave
MAX
335
0
-1745
MAX
443
0
-2305
MIN
0
0
-1777
MIN
0
0
-2347
134
0
-1771
MEAN
177
0
-2340
MEAN
(a)
(b)
126
Total Force
The summation of inertia force, wind force and gravitational force is regarded as
total force, and it is presented in Figures 3-10 to 3-11 and Table 3-5.
1500
Total Force (kips)
Total Force (kips)
1500
1000
500
0
1000
500
0
0
2000
4000 6000 8000 10000 12000
Time (a)
(sec)
0
2000
4000 6000 8000 10000 12000
Time
(b)(sec)
-1600
-2150
-1650
-2200
Total Force (kips)
Total Force (kips)
Fig 0-10 Surge Total Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0 Degrees)
-1700
-1750
-1800
0
2000 4000 6000 8000 10000 12000
Time (sec)
(a)
-2250
-2300
-2350
-2400
0
2000 4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-11 Heave Total Force of (a) Derrick and (b) Derrick + Skid Base (SPAR with 0 Degrees)
Except for wind force, both inertia force and gravity force on SPAR derrick are
larger than those of TLP derrick, so total force on derrick and skid base of SPAR is
admittedly large.
127
Table 0-5 Total Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SPAR with 0 Degrees)
Surge
Total
Sway
Heave
Total
Surge
Sway
Heave
MAX
1207
1
-1633
MAX
1493
1
-2169
MIN
-53
-2
-1780
MIN
-96
-2
-2354
MEAN
534
0
-1740
MEAN
645
0
-2303
(a)
(b)
Reaction Force
Four derrick footing reaction forces and 4 skid base footing reaction forces are
calculated the same way we calculated TLP. Since the total force applied on derrick and
skid base is bigger than that of TLP, we expect that the reaction force of each footing
will be bigger as well.
Derrick Reaction Force
The time history of total reaction force is shown in Figures 3-12 to 3-15, and the
statistics of reaction force for derrick footings are tabulated in Table 3-6.
1000
Reaction Force (kips)
Reaction Force (kips)
100
0
-100
-200
-300
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
500
0
-500
-1000
-1500
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-12 (a) Surge Reaction (b) Heave Reaction on Footing 1 (SPAR with 0 Degrees)
128
2500
Reaction Force (kips)
Reaction Force (kips)
100
0
-100
-200
-300
0
2000
4000 6000 8000 10000 12000
Time (sec)
2000
1500
1000
500
0
0
2000
(a)
4000 6000 8000 10000 12000
Time (sec)
(b)
100
2500
0
2000
Reaction Force (kips)
Reaction Force (kips)
Fig 0-13 (a) Surge Reaction (b) Heave Reaction on Footing 2 (SPAR with 0 Degrees)
-100
-200
-300
-400
0
2000
4000 6000 8000 10000 12000
Time (sec)
1500
1000
500
0
0
2000
(a)
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-14 (a) Surge Reaction (b) Heave Reaction on Footing 3 (SPAR with 0 Degrees)
500
0
Reaction Force (kips)
Reaction Force (kips)
100
-100
-200
-300
-400
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
0
-500
-1000
-1500
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-15 (a) Surge Reaction (b) Heave Reaction on Footing 4 (SPAR with 0 Degrees)
129
Table 0-6 Derrick Reaction Force Statistics (SPAR with 0 Degrees)
Node
Reaction
1
Node
Y
10
3
530
MIN
-299
-4
-1351
MEAN
-133
0
-341
X
Node
Z
MAX
Reaction
3
X
Y
2
Z
MAX
16
4
2175
MIN
-305
-3
359
MEAN
-133
0
1211
Node
4
Reaction
X
Y
Z
MAX
10
4
2131
MIN
-299
-3
406
MEAN
-133
0
1211
Reaction
X
Y
Z
MAX
16
3
482
MIN
-305
-4
-1308
MEAN
-133
0
-341
The mean uplifting force on node 1 and 4 is 341 kips and mean compression
force on node 2 and 3 is 1211 kips. For node 1 and 4, the maximum positive reaction
force of 527 kips and 479 kips stands for compression force. This means that upstream
node 1 and 4 experiences both tensile and compression force.
Skid Base Reaction Force
The time history of total reaction force is shown in Figures 3-16 to 3-19, and the
100
1000
0
500
Reaction Force (kips)
Reaction Force (kips)
statistics of reaction force for skid base footings are tabulated in Table 3-7.
-100
-200
-300
-400
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
0
-500
-1000
-1500
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-16 (a) Surge Reaction (b) Heave Reaction on Footing 5 (SPAR with 0 Degrees)
130
2500
0
Reaction Force (kips)
Reaction Force (kips)
100
-100
-200
-300
-400
0
2000
4000 6000 8000 10000 12000
Time (sec)
2000
1500
1000
500
0
2000
(a)
4000 6000 8000 10000 12000
Time (sec)
(b)
100
3000
0
2500
Reaction Force (kips)
Reaction Force (kips)
Fig 0-17 (a) Surge Reaction (b) Heave Reaction on Footing 6 (SPAR with 0 Degrees)
-100
-200
-300
-400
0
2000
4000 6000 8000 10000 12000
Time (sec)
2000
1500
1000
500
0
0
2000
(a)
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-18 (a) Surge Reaction (b) Heave Reaction on Footing 7 (SPAR with 0 Degrees)
1000
Reaction Force (kips)
Reaction Force (kips)
100
0
-100
-200
-300
-400
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
500
0
-500
-1000
-1500
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-19 (a) Surge Reaction (b) Heave Reaction on Footing 8 (SPAR with 0 Degrees)
131
Table 0-7 Skid Base Reaction Force Statistics (SPAR with 0 Degrees)
Node
5
Node
7
Reaction
X
Y
Z
MAX
20
2
684
MIN
-369
-2
-1411
MEAN
-161
0
-284
Reaction
X
Y
Z
MAX
28
2
2504
MIN
-377
-2
490
MEAN
-161
0
1435
Node
Reaction
6
Node
Y
Z
MAX
20
2
2472
MIN
-369
-2
525
MEAN
-161
0
1435
Reaction
8
X
X
Y
Z
MAX
28
2
650
MIN
-377
-2
-1378
MEAN
-161
0
-284
The absolute value of mean reaction force on upstream footings node 5 and 8 is
decreased relative to the reaction force of derrick footings because a portion of
increased weight of skid base plays a role in resisting overturning moment. Similarly,
the footings on downstream footings node 6 and 7 experience more compression force
than derrick footing at the same location.
200-year and 1000-year Hurricane Conditions
A similar analysis is carried out for 200-year and 1000-year hurricane conditions.
Each force component and reaction force will be presented.
132
200-year Hurricane Condition
Table 3-8 shows the force components of derrick and skid base footings for 200year hurricane condition.
Table 0-8 Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SPAR with 0 Degrees)
Inertia
Surge
Sway
Heave
Inertia
Surge
Sway
Heave
MAX
568
1
69
MAX
726
1
91
MIN
-457
-1
-52
MIN
-585
-1
-68
0
0
1
0
0
1
MEAN
Wind
Surge
Sway
Heave
MEAN
Wind
Surge
Sway
Heave
MAX
848
1
113
MAX
1001
2
133
MIN
229
-2
0
MIN
266
-2
0
MEAN
457
0
39
MEAN
536
0
46
Gravity
Surge
Sway
Heave
Gravity
Surge
Sway
Heave
MAX
363
0
-1740
MAX
479
0
-2298
MIN
0
0
-1777
MIN
0
0
-2347
148
0
-1770
MEAN
196
0
-2338
MEAN
Total
Surge
Sway
Heave
Total
Surge
Sway
Heave
MAX
1317
1
-1603
MAX
1626
2
-2131
MIN
-21
-2
-1779
MIN
-59
-2
-2352
MEAN
605
0
-1730
MEAN
731
0
-2291
(a)
(b)
133
The reaction force of each footing for 200-year hurricane condition is shown in
Table 3-9.
Table 0-9 Reaction Force Statistics (SPAR with 0 Degrees)
Node
1
Node
3
Node
5
Node
7
Reaction
X
Y
Z
MAX
2
3
483
MIN
-326
-4
-1521
MEAN
-151
0
-448
Reaction
X
Y
Z
MAX
8
4
2330
MIN
-332
-3
405
MEAN
-151
0
1313
Reaction
X
Y
Z
MAX
10
2
632
MIN
-403
-2
-1601
MEAN
-183
0
-403
Reaction
X
Y
Z
MAX
19
2
2677
MIN
-410
-2
541
MEAN
-183
0
1548
Node
2
Node
4
Node
6
Node
8
Reaction
X
Y
Z
MAX
2
4
2286
MIN
-326
-3
454
MEAN
-151
0
1313
Reaction
X
Y
Z
MAX
8
3
434
MIN
-332
-4
-1479
MEAN
-151
0
-448
Reaction
X
Y
Z
MAX
10
2
2643
MIN
-403
-2
577
MEAN
-183
0
1549
Reaction
X
Y
Z
MAX
19
2
597
MIN
-410
-2
-1570
MEAN
-183
0
-403
134
1000-year Hurricane Condition
Table 3-10 shows the force components of derrick and skid base footings for
1000-year hurricane condition.
Table 0-10 Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SPAR with 0 Degrees)
Inertia
Surge
Sway
Heave
Inertia
Surge
Sway
Heave
MAX
654
1
117
MAX
837
1
155
MIN
-516
-1
-87
MIN
-660
-1
-115
0
0
1
0
0
2
MEAN
Wind
Surge
Sway
Heave
MEAN
Wind
Surge
Sway
Heave
MAX
1236
2
229
MAX
1457
2
269
MIN
319
-2
0
MIN
369
-3
0
MEAN
655
0
79
MEAN
766
0
92
Gravity
Surge
Sway
Heave
Gravity
Surge
Sway
Heave
MAX
486
0
-1709
MAX
642
0
-2257
MIN
0
0
-1777
MIN
0
0
-2347
209
0
-1764
MEAN
275
0
-2329
MEAN
Total
Surge
Sway
Heave
Total
Surge
Sway
Heave
MAX
1694
2
-1450
MAX
2098
2
-1942
MIN
94
-2
-1784
MIN
74
-3
-2359
MEAN
863
0
-1683
MEAN
1041
0
-2236
(a)
(b)
135
The reaction force of each footing for 1000-year hurricane condition is shown in
Table 3-11.
Table 0-11 Reaction Force Statistics (SPAR with 0 Degrees)
Node
1
Node
3
Node
5
Node
7
Reaction
X
Y
Z
MAX
-27
4
313
MIN
-420
-4
-2115
MEAN
-216
0
-835
Reaction
X
Y
Z
MAX
-20
5
2856
MIN
-427
-4
569
MEAN
-216
0
1677
Reaction
X
Y
Z
MAX
-23
2
447
MIN
-520
-2
-2265
MEAN
-260
0
-831
Reaction
X
Y
Z
MAX
-14
3
3255
MIN
-529
-2
720
MEAN
-260
0
1949
Node
2
Node
4
Node
6
Node
8
Reaction
X
Y
Z
MAX
-27
5
2811
MIN
-420
-4
623
MEAN
-216
0
1678
Reaction
X
Y
Z
MAX
-20
4
259
MIN
-427
-4
-2060
MEAN
-216
0
-836
Reaction
X
Y
Z
MAX
-23
3
3222
MIN
-520
-2
760
MEAN
-260
0
1949
Reaction
X
Y
Z
MAX
-14
2
408
MIN
-529
-2
-2225
MEAN
-260
0
-831
The mean reaction forces of each footing are compared in Figures 3-20 and 321.
136
Node 2
Node 3
Node 5
Node 4
0
0
-50
-50
-100
-100
kips
kips
Node 1
-150
-200
Node 6
Node 7
Node 8
-150
-200
-250
-300
-250
100 year
200 year
100 year
1000 year
200 year
1000 year
Fig 0-20 Mean Surge Reaction Force (SPAR with 0 Degrees)
Node 1
Node 2
Node 3
Node 4
Node 5
2000
kips
kips
1500
1000
500
0
-500
-1000
100 year
200 year
1000 year
Node 6
Node 7
Node 8
2500
2000
1500
1000
500
0
-500
-1000
100 year
200 year
1000 year
Fig 0-21 Mean Heave Reaction Force (SPAR with 0 Degrees)
137
CASE 3. SEMI (10,000FT) WITH DERRICK AA – 0 DEGREE
CASE
SEMI Motion Time History
This case study shows the characteristics of SEMI motion and the reaction force
on the footings. The environmental condition for this case is same as previous TLP and
SPAR case, but the water depth is 10,000ft, not 3,000ft. 3-hour simulation results of
SEMI motion and its spectral density for 100-year hurricane condition are illustrated in
Figures 4-1 to 4-3.
3
200
2.5
150
2
S()
Motion(ft)
4
250
100
1.5
50
1
0
0.5
-50
0
2000
4000 6000 8000 10000 12000
Frequency(rad/sec)
x 10
0
0
0.2
0.4
0.6
0.8
1
1.2
1
1.2
(rad/sec)
Fig 0-1 SEMI Surge Motion and Spectrum (0 Degrees)
30
150
100
10
S()
Motion(ft)
20
0
50
-10
-20
0
2000
4000 6000 8000 10000 12000
Frequency(rad/sec)
0
0
0.2
0.4
0.6
0.8
(rad/sec)
Fig 0-2 SEMI Heave Motion and Spectrum (0 Degrees)
15
100
10
80
5
60
S()
Motion(Deg)
138
0
-5
20
-10
-15
40
0
2000
0
4000 6000 8000 10000 12000
Frequency(rad/sec)
0
0.2
0.4
0.6
0.8
1
1.2
(rad/sec)
Fig 0-3 SEMI Pitch Motion and Spectrum (0 Degrees)
Inertia Force on Derrick and Skid Base
The inertial force of derrick and skid base are calculated based on the hull
motion, and are summarized in Figures 4-4 to 4-5 and Table 4-1.
400
Inertia Force (kips)
Inertia Force (kips)
400
200
0
-200
-400
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
200
0
-200
-400
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-4 Surge Inertia Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0 Degrees)
139
400
Inertia Force (kips)
Inertia Force (kips)
400
200
0
-200
-400
0
2000 4000 6000 8000 10000 12000
Time (sec)
200
0
-200
-400
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
(b)
Fig 0-5 Heave Inertia Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0 Degrees)
Table 0-1 Inertia Force Statistics for (a) Derrick and (b) Derrick + Skid Base
(TLP with 0 Degrees)
Inertia
Surge
Sway
Heave
Inertia
Surge
Sway
Heave
MAX
221
0
181
MAX
277
0
230
MIN
-194
0
-147
MIN
-249
0
-203
-1
0
2
-2
0
3
MEAN
MEAN
Surge inertia forces of derrick and skid base are relatively small compared to the
inertia force of TLP and SPAR. However, the heave inertia force of the SEMI shows the
biggest values among the three structures.
Wind Force
The derrick and skid base of SEMI are assumed to be mounted at the deck
which is located 140ft above MWL. So, the pattern of wind force is similar with the
pattern of SPAR.
140
Table 0-2 Wind Force on Derrick and Skid Base (SEMI with 0 Degrees)
z elev
above
MWL to
Mid-Point
U(z)
1-hr
ave
Cshape
Effective
Pressur
e
Perm
Factor
Projecte
d Area
Max.
Force
Momen
t
343
218
1.25
122.41
0.6
2805
206
41719
258
211
1.25
117.89
0.6
2975
210
24739
Drill floor
208
205
1.50
137.40
1.0
750
103
6956
Substructur
e
175
201
1.50
134.22
0.6
2500
201
7047
721
80460
131
654
852
81114
100 YEAR
Upper
derrick
Lower
derrick
Derrick
Skid base
145
196
1.50
130.73
1.0
1000
900
900
800
800
Wind Force (kips)
Wind Force (kips)
Derrick
+ Skid Base
700
600
500
400
300
200
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
700
600
500
400
300
200
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-6 Surge Wind Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0 Degrees)
150
150
100
100
Wind Force (kips)
Wind Force (kips)
141
50
0
-50
-100
0
2000
50
0
-50
-100
4000 6000
(a) 8000 10000 12000
Time (sec)
0
2000
4000 (b)
6000 8000 10000 12000
Time (sec)
Fig 0-7 Heave Wind Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0 Degrees)
Table 0-3 Wind Force Statistics for (a) Derrick and (b) Derrick + Skid Base (TLP with 0 Degrees)
Wind
Surge
Sway
Heave
Wind
Surge
Sway
Heave
MAX
749
0
85
MAX
891
0
101
MIN
212
0
-77
MIN
252
0
-92
MEAN
411
0
5
MEAN
489
0
5
(a)
(b)
Gravity Force
500
Gravity Force (kips)
Gravity Force (kips)
500
0
-500
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
0
-500
0
2000
4000 6000 8000
Time (sec)
10000 12000
(b)
Fig 0-8 Surge Gravity Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0 Degrees)
142
-1800
Gravity Force (kips)
Gravity Force (kips)
-1800
-2000
-2200
-2400
0
2000
-2000
-2200
-2400
0
4000 6000 8000 10000 12000
Time (sec)
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
(b)
Fig 0-9 Heave Gravity Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0 Degrees)
Table 0-4 Gravity Force Statistics for (a) Derrick and (b) Derrick + Skid Base
(SPAR with 0 Degrees)
Gravity
Surge
Sway
Gravity
Heave
Surge
Sway
Heave
MAX
315
0
-1749
MAX
416
0
-2309
MIN
-317
0
-1777
MIN
-418
0
-2347
18
0
-1774
MEAN
24
0
-2343
MEAN
Total Force
The time history of total force and statistics of force are shown in Figures 4-10, 4-
1500
1500
1000
1000
Total Force (kips)
Total Force (kips)
11 and Table 4-5.
500
0
-500
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
500
0
-500
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-10 Surge Total Force of (a) Derrick and (b) Derrick + Skid Base (SEMI with 0 Degrees)
143
-2000
-2100
-1600
Total Force (kips)
Total Force (kips)
-1500
-1700
-1800
-1900
-2000
0
2000
4000 6000 8000 10000 12000
Time (sec)
-2200
-2300
-2400
-2500
-2600
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
(b)
Fig 0-11 Heave Total Force for (a) Derrick and (b) Derrick + Skid Base (SEMI with 0 Degrees)
Table 0-5 Total Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SEMI with 0 Degrees)
Total
Surge
Sway
Heave
Total
Surge
Sway
Heave
MAX
872
0
-1506
MAX
1073
0
-2005
MIN
-119
0
-1960
MIN
-194
0
-2591
MEAN
428
0
-1768
MEAN
510
0
-2335
(a)
(b)
Reaction Force
The time history of total reaction force is shown in Figures 4-12 to 4-15, and the
statistics of reaction force for derrick footings are tabulated in Table 4-6.
144
1000
0
Reaction Force (kips)
Reaction Force (kips)
50
-50
-100
-150
-200
-250
0
2000
500
0
-500
-1000
4000 6000 8000 10000 12000
Time (sec)
0
2000
(a)
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-12 (a) Surge Reaction (b) Heave Reaction on Footing 1 (SEMI with 0 Degrees)
2000
0
Reaction Force (kips)
Reaction Force (kips)
50
-50
-100
-150
-200
-250
0
2000
1500
1000
500
0
4000 6000 8000 10000 12000
Time (sec)
0
2000
(a)
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-13 (a) Surge Reaction (b) Heave Reaction on Footing 2 (SEMI with 0 Degrees)
2000
0
Reaction Force (kips)
Reaction Force (kips)
50
-50
-100
-150
-200
-250
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
1500
1000
500
0
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-14 (a) Surge Reaction (b) Heave Reaction on Footing 3 (SEMI with 0 Degrees)
145
1000
0
Reaction Force (kips)
Reaction Force (kips)
50
-50
-100
-150
-200
-250
0
2000
4000 6000 8000 10000 12000
Time (sec)
500
0
-500
-1000
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
(b)
Fig 0-15 (a) Surge Reaction (b) Heave Reaction on Footing 4 (SEMI with 0 Degrees)
Table 0-6 Derrick Reaction Force Statistics (SEMI with 0 Degrees)
Node
1
Node
3
Reaction
X
Y
Z
MAX
28
5
588
MIN
-218
-4
-876
MEAN
-107
0
-193
Reaction
X
Y
Z
MAX
31
4
1698
MIN
-219
-5
319
MEAN
-107
0
1077
Node
2
Node
4
Reaction
X
Y
Z
MAX
28
4
1688
MIN
-218
-5
338
MEAN
-107
0
1077
Reaction
X
Y
Z
MAX
31
5
569
MIN
-219
-4
-854
MEAN
-107
0
-193
146
Skid Base Reaction Force
1000
Reaction Force (kips)
Reaction Force (kips)
100
0
-100
-200
-300
0
2000
500
0
-500
-1000
4000 6000 8000 10000 12000
Time (sec)
0
2000
(a)
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-16 (a) Surge Reaction (b) Heave Reaction on Footing 5 (SEMI with 0 Degrees)
2000
Reaction Force (kips)
Reaction Force (kips)
100
0
-100
-200
-300
0
2000
1500
1000
500
0
4000 6000 8000 10000 12000
Time (sec)
0
2000
(a)
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-17 (a) Surge Reaction (b) Heave Reaction on Footing 6 (SEMI with 0 Degrees)
2000
Reaction Force (kips)
Reaction Force (kips)
100
0
-100
-200
-300
0
2000
4000 6000 8000 10000 12000
Time (sec)
(a)
1500
1000
500
0
0
2000
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-18 (a) Surge Reaction (b) Heave Reaction on Footing 7 (SEMI with 0 Degrees)
147
1000
Reaction Force (kips)
Reaction Force (kips)
100
0
-100
-200
-300
0
2000
4000 6000 8000 10000 12000
Time (sec)
500
0
-500
-1000
0
2000
(a)
4000 6000 8000 10000 12000
Time (sec)
(b)
Fig 0-19 (a) Surge Reaction (b) Heave Reaction on Footing 8 (SEMI with 0 Degrees)
Table 0-7 Skid Base Reaction Force Statistics (SEMI with 0 Degrees)
Node
5
Node
7
Reaction
X
Y
Z
MAX
47
3
750
MIN
-269
-2
-899
MEAN
-128
0
-127
Reaction
X
Y
Z
MAX
50
2
1984
MIN
-269
-3
455
MEAN
-128
0
1295
200-year and 1000-year Hurricane Conditions
Node
6
Node
8
Reaction
X
Y
Z
MAX
47
2
1981
MIN
-269
-3
468
MEAN
-128
0
1295
Reaction
X
Y
Z
MAX
50
3
736
MIN
-269
-2
-883
MEAN
-128
0
-127
148
200-year Hurricane Condition
Table 0-8 Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SEMI with 0 Degrees)
Inertia
Surge
Sway
Heave
Inertia
Surge
Sway
Heave
MAX
231
0
196
MAX
291
0
250
MIN
-215
0
-160
MIN
-279
0
-222
-1
0
2
-2
0
3
MEAN
Wind
Surge
Sway
Heave
MEAN
Wind
Surge
Sway
Heave
MAX
863
0
110
MAX
1028
0
130
MIN
240
0
-98
MIN
285
0
-117
MEAN
470
0
6
MEAN
559
0
7
Gravity
Surge
Sway
Heave
Gravity
Surge
Sway
Heave
MAX
354
0
-1741
MAX
467
0
-2300
MIN
-354
0
-1777
MIN
-467
0
-2347
21
0
-1774
MEAN
27
0
-2342
MEAN
Total
Surge
Sway
Heave
Total
Surge
Sway
Heave
MAX
997
0
-1470
MAX
1222
0
-1955
MIN
-103
0
-1980
MIN
-180
0
-2618
MEAN
490
0
-1765
MEAN
585
0
-2332
(a)
(b)
149
Table 0-9 Reaction Force Statistics (SEMI with 0 Degrees)
Node
1
Node
3
Node
5
Node
7
Reaction
X
Y
Z
MAX
25
5
564
MIN
-248
-5
-1068
MEAN
-122
0
-285
Reaction
X
Y
Z
MAX
27
5
1875
MIN
-251
-5
348
MEAN
-122
0
1168
Reaction
X
Y
Z
MAX
43
3
723
MIN
-304
-2
-1117
MEAN
-146
0
-232
Reaction
X
Y
Z
MAX
47
2
2175
MIN
-308
-3
489
MEAN
-146
0
1398
Node
2
Node
4
Node
6
Node
8
Reaction
X
Y
Z
MAX
25
5
1849
MIN
-248
-5
369
MEAN
-122
0
1168
Reaction
X
Y
Z
MAX
27
5
543
MIN
-251
-5
-1042
MEAN
-122
0
-285
Reaction
X
Y
Z
MAX
43
2
2155
MIN
-304
-3
504
MEAN
-146
0
1398
Reaction
X
Y
Z
MAX
47
3
708
MIN
-308
-2
-1098
MEAN
-146
0
-232
150
1000-year Hurricane Condition
Table 0-10 Force Statistics for (a) Derrick and (b) Derrick + Skid Base (SEMI with 0 Degrees)
Inertia
Surge
Sway
Heave
Inertia
Surge
Sway
Heave
MAX
266
0
252
MAX
340
0
328
MIN
-275
0
-206
MIN
-364
0
-292
-1
0
4
-3
0
5
MEAN
Wind
Surge
Sway
Heave
MEAN
Wind
Surge
Sway
Heave
MAX
1265
0
243
MAX
1505
0
290
MIN
335
0
-197
MIN
398
0
-234
MEAN
676
0
13
MEAN
804
0
15
Gravity
Surge
Sway
Heave
Gravity
Surge
Sway
Heave
MAX
525
0
-1698
MAX
693
0
-2242
MIN
-473
0
-1777
MIN
-625
0
-2347
30
0
-1771
MEAN
40
0
-2339
MEAN
Total
Surge
Sway
Heave
Total
Surge
Sway
Heave
MAX
1448
0
-1324
MAX
1505
0
290
MIN
-72
0
-2056
MIN
398
0
-234
MEAN
705
0
-1754
MEAN
804
0
15
(a)
(b)
151
Table 0-11 Reaction Force Statistics (SEMI with 0 Degrees)
Node
1
Node
3
Node
5
Node
7
Reaction
X
Y
Z
MAX
16
6
528
MIN
-361
-5
-1766
MEAN
-176
0
-607
Reaction
X
Y
Z
MAX
20
5
2474
MIN
-363
-6
403
MEAN
-176
0
1484
Reaction
X
Y
Z
MAX
37
3
686
MIN
-443
-3
-1902
MEAN
-210
0
-592
Reaction
X
Y
Z
MAX
41
3
2846
MIN
-445
-3
557
MEAN
-210
0
1752
Node
2
Node
4
Node
6
Node
8
Reaction
X
Y
Z
MAX
16
5
2460
MIN
-361
-6
432
MEAN
-176
0
1484
Reaction
X
Y
Z
MAX
20
6
490
MIN
-363
-5
-1752
MEAN
-176
0
-607
Reaction
X
Y
Z
MAX
37
3
2836
MIN
-443
-3
571
MEAN
-210
0
1752
Reaction
X
Y
Z
MAX
41
3
659
MIN
-445
-3
-1892
MEAN
-210
0
-592
152
Node 1
Node 2
200 year
Node 4
Node 5
0
-50
-50
-100
Node 6
100 year
1000 year
0
kips
kips
100 year
Node 3
Node 7
200 year
Node 8
1000 year
-100
-150
-150
-200
-200
-250
Fig 0-20 Mean Surge Reaction Force (SEMI with 0 Degrees)
Node 1
Node 2
200 year
Node 4
Node 5
1000 year
2000
2000
1500
1000
1500
1000
500
0
-500
-1000
Node 6
100 year
kips
kips
100 year
Node 3
Node 7
200 year
Node 8
1000 year
500
0
-500
-1000
Fig 0-21 Mean Heave Reaction Force (SEMI with 0 Degrees)
153
SUMMARY
TLP vs SPAR vs SEMI Analysis
Due to the difference of motion characteristics between TLP, SPAR and SEMI,
resultant reaction force is also different. As we have already seen, total horizontal force
exerted on the SPAR derrick and skid base is generally bigger than total force on TLP
or SEMI derrick. Figures 5-1 to 5-4 show the forces exerted on the derrick for TLP,
SPAR and SEMI. A comparison of the reaction force is also presented for 0 degree
case in 100-year hurricane condition
Inertia Force
Inertia Force
600
200
400
MAX
MIN
MEAN
SEMI
kips
kips
SPAR
0
-200
100
TLP
200
TLP
SPAR
0
MAX
MIN
MEAN
SEMI
-100
-400
-600
-200
(a)
(b)
Fig 0-1 (a) Surge and (b) Heave Inertia Force
Wind Force
Wind Force
150
1000
100
TLP
600
SPAR
400
SEMI
200
kips
kips
800
MAX
MIN
(a)
MEAN
SPAR
0
-50
0
TLP
50
MAX
MIN
-100
(b)
Fig 0-2 (a) Surge and (b) Heave Wind Force
MEAN
SEMI
154
Gravity Force
Gravity Force
400
-1720
TLP
SPAR
0
MAX
MIN
MEAN
SEMI
-200
kips
kips
MAX
-1730
200
MIN
MEAN
-1740
TLP
-1750
SPAR
-1760
SEMI
-1770
-400
-1780
(a)
(b)
Fig 0-3 (a) Surge and (b) Heave Gravity Force
Total Force
Total Force
0
1500
-500
TLP
SPAR
500
SEMI
0
MAX
MIN
-500
MEAN
kips
kips
1000
MAX
MIN
MEAN
TLP
-1000
SPAR
-1500
SEMI
-2000
-2500
(a)
(b)
Fig 0-4 (a) Surge and (b) Heave Total Force
Surge inertia force shows that maximum and minimum force of SPAR is the
biggest among the three structures and that of SEMI is the smallest. On the contrary,
heave inertial force of SEMI is bigger than that of TLP and SPAR.
Wind
force
for
surge direction of TLP is stronger because the location of derrick of TLP is higher than
location of SPAR and SEMI derrick; however, the heave wind forces of SPAR and SEMI
are bigger due to large tilt angle that causes a bigger vertical component of wind force.
Most of these differences come from the large pitch motion of SPAR and the trend of
resultant reaction force of each footing is affected by these differences.
155
Node #1 Reaction Force
Node #1 Reaction Force
100
1000
-100
MAX
MIN
MEAN
SPAR
-200
500
TLP
SEMI
kips
kips
0
TLP
0
-500
-300
-1000
-400
-1500
MAX
(a)
MIN
MEAN
SPAR
SEMI
(b)
Fig 0-5 (a) Surge and (b) Heave Reaction Force at Node 1
Node #2 Reaction Force
Node #2 Reaction Force
100
2500
2000
-100
MAX
MIN
MEAN
TLP
SPAR
-200
kips
kips
0
SEMI
TLP
1500
SPAR
1000
SEMI
500
-300
0
MAX
-400
(a)
MIN
MEAN
(b)
Fig 0-6 (a) Surge and (b) Heave Reaction Force at Node 2
Node #3 Reaction Force
Node #3 Reaction Force
2500
100
kips
-100
MAX
MIN
MEAN
TLP
SPAR
-200
SEMI
-300
kips
2000
0
TLP
1500
SPAR
1000
SEMI
500
0
MAX
-400
(a)
MIN
MEAN
(b)
Fig 0-7 (a) Surge and (b) Heave Reaction Force at Node 3
156
Node #4 Reaction Force
Node #4 Reaction Force
1000
100
500
-100
MAX
MIN
TLP
MEAN
kips
kips
0
SPAR
-200
SEMI
TLP
0
MAX
-500
-300
-1000
-400
-1500
MIN
(a)
MEAN
SPAR
SEMI
(b)
Fig 0-8 (a) Surge and (b) Heave Reaction Force at Node 4
For all footings, reaction force of SPAR is bigger than TLP and SEMI reaction
forces when all other conditions are the same except for derrick height as shown in
Figures 5-5 to 5-8. This means the design criteria of derrick footings of SPAR should be
more severe than that of TLP and SEMI.
Incident Angle Analysis
In this study, a total of 4 different incident angles have been selected, and for
each incident heading, maximum uplift forces of TLP, SPAR and SEMI are presented.
100 year
200 year
1000 year
3500
Uplift (kips)
3000
2500
2000
1500
1000
500
0
0
20
40
60
Angle
Fig 0-9 TLP Derrick Uplift Force
80
100
157
Figure 5-9 shows that the maximum uplift force on the derrick occurs when
external force is applied from 45 degrees. This tendency does still hold for the SPAR
and SEMI case as we can see in Figures 5-10 to 5-11. It is obvious that the squared
shape derrick has its maximum wind projected area when it stands at a 45 degree
angle.
Uplift (kips)
100 year
200 year
1000 year
4500
4000
3500
3000
2500
2000
1500
1000
500
0
0
20
40
60
80
100
Angle
Fig 0-10 SPAR Derrick Uplift Force
100 year
200 year
1000 year
4000
Uplift (kips)
3500
3000
2500
2000
1500
1000
500
0
0
20
40
60
80
100
Angle
Fig 0-11 SEMI Derrick Uplift Force
Figure 5-12 shows that the maximum uplift force occurs when external force is
applied from either 21.25 degree or 45 degree or any angle between them. It doesn’t
158
seem that the difference is noticeable, but the uplift force is slightly bigger for 21.25
degree case.
100 year
200 year
1000 year
2500
Uplift (kips)
2000
1500
1000
500
0
-500
0
20
40
60
80
100
Angle
Fig 0-12 TLP Skid Base Uplift Force
100 year
200 year
1000 year
3500
Uplift (kips)
3000
2500
2000
1500
1000
500
0
0
20
40
60
80
Angle
Fig 0-13 SPAR Skid Base Uplift Force
100
159
100 year
200 year
1000 year
3000
Uplift (kips)
2500
2000
1500
1000
500
0
0
20
40
60
80
100
Angle
Fig 0-14 SEMI Skid Base Uplift Force
External Force Contribution Analysis
The external forces applied on the derrick and skid base consist of three different
components and the portions of these forces are different among the structures. Figures
5-15 and 5-17 show the different contribution of external forces which cause the
maximum surge reaction forces. Wind force is dominant in this case, and gravity force is
nearly zero because TLP does not have serious roll and pitch motions.
Inertia
Wind
Gravity
Surge Reaction (kips)
1200
1000
800
600
400
200
0
0
20
40
60
80
Angle
Fig 0-15 TLP Skid Base Surge Reaction Component
100
160
This pattern is different for SPAR case. The contribution of inertia and gravity
forces are greatly increased compared to TLP case. The gravity force contribution for
surge reaction force is comparable to the inertia force contribution of TLP.
Inertia
Wind
Gravity
Surge Reaction (kips)
1200
1000
800
600
400
200
0
0
20
40
60
80
100
Angle
Fig 0-16 SPAR Skid Base Surge Reaction Component
For the SEMI case, the contribution of inertia force is less than the other force
contributions. The reason we can think of is that the SEMI is in the deeper water while
TLP and SPAR are in the relatively shallow water.
Inertia
Wind
Gravity
Surge Reaction (kips)
1200
1000
800
600
400
200
0
0
20
40
60
80
100
Angle
Fig 0-17 SEMI Skid Base Surge Reaction Component
161
Similar trend can be observed for the sway reaction force case as shown in
Figures 5-18 and 5-20.
Inertia
Wind
Gravity
Sway Reaction (kips)
1000
800
600
400
200
0
-200
0
20
40
60
80
100
Angle
Fig 0-18 TLP Skid Base Sway Reaction Component
Sway Reaction (kips)
Inertia
Wind
Gravity
900
800
700
600
500
400
300
200
100
0
0
20
40
60
80
100
Angle
Fig 0-19 SPAR Skid Base Sway Reaction Component
Both cases show that the horizontal reaction force of derrick and skid base
footings are mostly caused by the wind force, but inertia and gravity forces play an
important role in the SPAR case as well.
162
Sway Reaction (kips)
Inertia
Wind
Gravity
900
800
700
600
500
400
300
200
100
0
0
20
40
60
80
100
Angle
Fig 0-20 SEMI Skid Base Sway Reaction Component
For SEMI case, the inertial force contribution to the sway reaction force is
relatively small than contribution of wind and gravity forces.
163
ADDITIONAL TOPICS
Simple Beam Model
We have derived the reaction force of the derrick footing and skid base footing
separately and for simplicity, we assumed that the derrick is always positioned at the
center of the deck. However, the derrick could be located at the end of skid rail for some
reason during hurricane condition, and then the reaction force of skid base footing will
be significantly changed due to the change of applied force on the skid beam. Simple
support beam analysis is used to calculate the reaction force of skid base footings with
off-centered derrick.
Simple Beam Solution
Think of simplified simple support beam in Figure 6-1. The reaction force of node
1 and 2 can be calculated as below,
P1
P2
2
1
a
b
Fig 0-1 Simple Support Beam Model
L
164
F 0
: R1 R 2 P1 P 2 0
M 0
: a P1 b P 2 L R 2 0
Thus, the reaction forces R1 and R2 would be
a
b
R1 (1 ) P1 (1 ) P 2
L
L
R2
a
b
P1 P 2
L
L
Now, let us compare the reaction forces R1 and R2 for two different cases. When
a=L-b, which indicate that the derrick is in the center position, the reaction forces can be
derived as
R1 (1
R2
Lb
b
) P1 (1 ) P 2
L
L
b
b
P1 (1 ) P 2
L
L
Lb
b
P1 P 2
L
L
b
b
(1 ) P1 P 2
L
L
If the derrick is shifted to the end of the skid rail, then we can derive the reaction
force of skid base by substituting a with zero
b
R1 P1 (1 ) P 2
L
R2
b
P2
L
165
By comparing those two different reaction forces, we can figure out that the
increase of reaction force of R1 is going to be
b
b
b
b
R1 P1 (1 ) P 2 P1 (1 ) P 2 (1 ) P1
L
L
L
L
R 2
b
b
b
b
P 2 (1 ) P1 P 2 ( 1) P1
L
L
L
L
Since b L , the reaction force of R1 and R2 will be positive and negative values
respectively. Definitely, the movement of derrick to the one end of the skid rail will affect
the reactions for both footings such that the one near the derrick will have more
compression force due to the derrick weight. On the contrary, the footing on the other
sides will have less compression force which means that footing could experience more
severe uplift force. The detail cases are presented.
Off-centered derrick case study
Case 1. Centered Position
At the centered position, the reaction force of footings 5 to 8 are already
presented and tabulated again.
7
8
+DY
DX
0
+DX
5
DY
0
6
Fig 0-2 Derrick of Centered Position
Table 0-1 Skid Base Uplift Force of Case 1 (SPAR, Lightship Condition)
166
100 Yr RP
Longitudinal
Lateral
Uplift
0
357
2
1368
22.5
372
143
1809
45
292
290
1743
90
5
339
263
As shown in table above, the maximum uplift force is 1809 kips in footing 5, when
WWC is coming from 22.5 degrees.
Case 2. Off-Centered Position to Lee Side
This case will be show the difference of reaction force of weather side footings.
7
8
+DY
+DX
5
DX
0
DY
27.5
6
Fig 0-3 Derrick of Off-Centered Position to Lee Side
167
Table 0-2 Skid Base Uplift Force of Case 2 (SPAR, Lightship Condition)
100 Yr RP
Longitudinal
Lateral
Uplift
0
499
57
1597
22.5
521
201
2035
45
409
335
1968
90
6
339
490
The maximum uplift force of weather side footing 5 is 2035 kips. Compared to the
center-positioned case, the possibilities of toppling down of skid base will appreciable
increased. While, we can notice that the maximum compression forces of lee side
footings 7 and 8 are increased due to the derrick weight.
Case 3. Off-Centered Position to Weather Side
7
8
+DY
+DX
5
DX
0
DY
-27.5
6
Fig 0-4 Derrick of Off-Centered Position to Weather Side
168
Table 0-3 Skid Base Reaction Force of Case 3 (SPAR with 90 Degrees)
100 Yr RP
Longitudinal
Lateral
Uplift
0
490
53
1567
22.5
516
199
1589
45
409
336
1526
90
6
339
41
This case is similar with case 2, but the derrick is moved to the weather side, so
the maximum uplift forces on the weather side footings will be significantly decreased
because the shifted derrick plays a role to compress the skid base.
The details of uplift force for those three different cases are tabulated below.
Table 0-4 Comparison of Maximum Uplift Force
0
Maximum Uplift
Force (kips)
1809
100%
0
27.5
2035
114%
0
-27.5
1589
88%
DX
DY
Case 1
0
Case 2
Case 3
Ratio
Phase Difference Effect
One of the advantages of the time domain simulation is that it contains phase
difference information which makes the simulation more realistic. Due to this phase
difference, maximum total force does not always occur with the maximum of each force
components. That is to say, sum of all the maximum of each force could be greater than
the maximum of total force.
169
Time Domain Simulation Data
To see the phase of each force component more clearly, time domain simulation
result is taken and illustrated in Figure 6-5. The red line shows the total lateral external
force acting on the derrick of TLP. The red solid line represents the total force and blue
dotted line represents the reaction force. These two lines show that the force and
kips
reaction force have a same magnitude but opposite direction.
250
200
150
100
Inertia Force
50
Wind Force
Gravity Force
0
Total
-50
Reaction
-100
-150
-200
-250
Fig 0-5 Lateral Force Components (TLP)
The total force expressed in red line above consists of inertia, wind and gravity
force and each forces are plotted in the same plane. At the time when the total force is
maximum (at the middle), we can notice that the other forces are not always maximum
as we can see above. The dominant component that contributes to the lateral force is
inertia force for TLP case.
kips
170
400
300
200
100
Inertia Force
Wind Force
Gravity Force
0
Total Force
Reaction
-100
-200
-300
-400
Fig 0-6 Lateral Force Components (SPAR)
For SPAR case, the tendency of the contribution of each force is similar, but we
can see that the gravity force contribution for the total lateral force is more appreciable
compared to the TLP case.
The vertical force component on the derrick structures are shown in Figures 6-7
to 6-8. We also see that the phase difference of each force component, which makes
more difficult for us to predict the total external forces and moments. So, time domain
simulation can be a good tool for the estimation of force and reaction force of tie-down
systems during hurricane conditions.
kips
171
1000
800
600
400
Gravity
200
Pitch Inertia
0
Pitch Wind
Total
-200
Reaction
-400
-600
-800
-1000
kips
Fig 0-7 Vertical Force Components (TLP)
1500
1000
500
Gravity
Pitch Inertia
Pitch Wind
0
Pitch Gravity
Total
Reaction
-500
-1000
-1500
Fig 0-8 Vertical Force Components (SPAR)
172
In order to see the effect of phase difference in time domain simulation, several
cases of total force are selected and tabulated in Table 6-5.
Table 0-5 Total Force Cases (SPAR Derrick, 45 degrees, 100-year condition)
Case
X
Y
Z
MX
MY
MZ
1
923
917
-1642
-93947
94580
12
2
867
859
-1623
-87689
88531
14
3
743
739
-1665
-75700
76086
-6
4
537
529
-1649
-52885
53741
-12
5
1024
1017
-1620
-104367
105141
19
6
1361
1353
-1558
-138596
139404
19
Case 1 and 2 shows the total force and moment when the horizontal and vertical
inertia force is maximum. By picking up the maximum wind force and associated inertia
and gravity force, total force and moment will be calculated as shown in case 3. At the
time when hull is tilted at the maximum degree, total force and moment are calculated
and tabulated in case 4. General calculation method using time domain simulation takes
the maximum total force and moment irrespective of each force component and
presented in case 5. If we do not consider phase difference and just take the maximum
of each force component and sum them up, then the total force and moment will be
greater than that of case 5. This sum of each maximum case is shown in case 6. The
data above shows good agreement as we expected and for the engineering design
purpose, total force and moment of case 6 can be used as one of the guideline which
include the safety factor.
173
Progressive Slip Failure
During severe hurricanes, the contact surfaces between deck structures become
wet and the resulting friction coefficient becomes much smaller than that of the dry
condition. As a result, a derrick may slip along a skid rail, which can lead to slip failure.
Its possibility can be checked by using dynamic loading calculations in time domain.
The friction force at one footing with a bolted clamp can be expressed as
F (t ) (nT0 N (t ))
where μ is the friction coefficient, n is the number of bolts and T0 is bolt pretension.
The friction coefficient between steel surfaces can be as low as 0.12 during the wet
condition. N(t) is time-varying up-lift (minus sign) or compression (plus sign) forces at
the bolt-clamp joint. Without any platform motions, N(t) becomes constant and equal
to one quarter of its weight. Since the normal force N(t) on each footing is available at
each time step, the resultant friction force can be obtained at each time step. At the
weather-side footing, N(t) becomes smaller due to uplift forces so that friction forces
are significantly reduced. The opposite holds true for the lee-side footing. So, those
two effects appear to compensate each other (see Figure 6-9). If we add all the friction
forces of 4 footings, we obtain the total friction force of the applied bolt-clamp (or
pneumatic grip) system, which is shown in Fig.8 for typical values of μ=0.12, n=12,
and T0 =137kips. The time histories of the total horizontal slip force on the derrick is
also plotted in the same figure. It seems that the slip failure does not happen in this
case because the total friction force is still significantly higher than total external slip
force.
174
1200
Friction Force (kips)
1000
800
600
400
200
0
0
2000
4000
6000
Time (sec)
8000
10000
12000
Fig 0-9 Total Friction Force (red, upper) and Total Horizontal Slip Force (blue, lower)
(TLP 90-deg case, 100-year condition)
However, if we consider the situation of each derrick footing separately, then
we may end up with quite different conclusion i.e. failure instead of survival. It is a very
interesting phenomenon, which we call ‘instantaneously progressive slip failure’. The
uplift force on the weather-side derrick footing can be large at a certain time, and it
can significantly reduce the local friction force according to the above equation. Once
the local friction force is less than the local slip force, slip starts to occur at the derrick
footing unless the derrick is completely rigid and the local friction force is
instantaneously reduced there since dynamic friction coefficient is usually appreciably
smaller than static friction coefficient. Then, the total friction capacity of the clamp
system is suddenly dropped, which may result in progressive slip failure in a very short
time interval. This kind of sudden friction-capacity change can be implemented in the
time-domain simulation, as can be seen in Figures 6-10 and 6-11, in which we can see
175
a series of sudden decrease of the total friction force when local slip occurs at the
weather-side footings. It is assumed in this example that the dynamic friction
coefficient is half of the static friction coefficient. To examine the possibility of
instantaneously progressive slip failure, all the 4 footings should be checked
simultaneously at each time step to see whether any one of them starts to slip and
how it affects the others. Here, we need to underscore that this progressive slip failure
happens during a very short time interval, so the derrick slips a small distance and
stops. This kind of minute slips, however, can be accumulated to lead to more serious
#4 Friction Force (kips)
#1 Friction Force (kips)
failure.
300
200
100
0
0
2000
4000
6000
Time (sec)
8000
10000
12000
0
2000
4000
6000
Time (sec)
8000
10000
12000
450
400
350
300
250
Fig 0-10 Local friction forces at the weather-side footing (#1) and lee-side footing (#4)
176
1200
Friction Force (kips)
1000
800
600
400
200
0
0
2000
4000
6000
Time (sec)
8000
10000
12000
Fig 0-11 Local Total Friction Force (red, upper) and Total Horizontal Slip Force (blue, lower)
(TLP 90-deg case, 100-year condition) with the effects of sudden drop of friction capacity
due to instant slip at weather-side footing.
Figures 6-12 and 6-13 show similar kinds of examples for the spar for the same
environment. It is seen that the spar derrick is more likely to slip due to larger heel
angles and accelerations compared to TLPs.
177
1400
1200
Friction Force (kips)
1000
800
600
400
200
0
-200
0
2000
4000
6000
Time (sec)
8000
10000
12000
Fig 0-12 Total Friction Force (red, upper) and
Total Horizontal Slip Force (blue, lower)
(spar 90-deg case, 100-year condition) (27 Instant slips)
1400
1200
Friction Force (kips)
1000
800
600
400
200
0
-200
0
2000
4000
6000
Time (sec)
8000
10000
12000
Fig 0-13 Total Friction Force (red, upper) and Total Horizontal Slip Force (blue, lower)
(spar 90-deg case, 100-year condition) with the effects of sudden drop of friction capacity
due to instant slip at weather-side footing. (78 Instant slips)
178
REFERENCES
API Bulletin 2INT-MET, 2007. Interim Guidance on Hurricane Conditions in the Gulf
of Mexico. American Petroleum Institute, Washington, DC.
API Specification 4F 2nd Edition, 1995. Specification for Drilling and Well
Servicing
Structures. American Petroleum Institute, Washington, DC.
API Specification 4F 3rd Edition, 2008. Specification for Drilling and Well
Servicing
Structures. American Petroleum Institute, Washington, DC.
Donnes, J., 2007. Comparison between the Current API Specification 4F 2nd Edition
and the Proposed API Specification 4F 3rd Edition. Masters Project Report,
Louisiana State University, LA.
Gebara, J. M. and Ghoneim, N., 2007. Assessment of the Performance of Tie-Down
Clamps for a Drilling Rig on a Spar in Severe Hurricane Environments. MMS
Project
#551 Analysis Report Appendix A, New Orleans, LA.
Kim, M.H., 1997. CHARM3D User’s Manual. Ocean Engineering Program, Civil
Engineering Department, Texas A&M University, College Station, TX.
Kim, M.H., Tahar, A., Kim, Y.B., 2001. Variability of TLP Motion Analysis against
Various Design Methodologies/Parameters. In: Proceedings of the 11th International
Offshore and Polar Engineering Conference, ISOPE 3. Stavanger, Norway.
Kim, M.H., Koo, B.J., Mercier, R.M., Ward, E.G., 2005. Vessel/Mooring/Riser Coupled
Dynamic Analysis of a Turret-Moored FPSO Compared with OTRC Experiment.
Ocean Engineering 32, 1780-1802.
179
Kim, M.H. and Yang, C.K., 2006. Global Motion of Deep Star TLP and the
Corresponding Load at the Connection of Derrick and Substructure in Extreme
Survival Condition. Ocean Engineering Program, Civil
Engineering
Department,
Texas A&M University, College Station, TX.
Lee, C.H., 1995. WAMIT Theory Manual. Department of Ocean Engineering,
Massachusetts Institute of Technology, Cambridge, MA.
Ran, Z., and Kim, M.H., 1997. Nonlinear Coupled Responses of a Tethered Spar
Platform in Waves. International Journal of Offshore and Polar Engineering 7, 111118.
Steen, M. Irani, M. and Kim, M.H., 2004. Prediction of Spar Responses: Model Test vs.
Analysis. In: Proceedings of the Offshore Technology Conference, OTC 16583.
Houston, TX.
Ward, E.G. and Gebara, J. M., 2006a. Assessment of Drilling & Workover Rig Storm
Sea Fastenings on Offshore Floating Platforms during Hurricane Ivan Phase1 Data
Collection Report. Offshore Technology Research Center, Texas A&M University,
College Station, TX.
Ward, E.G. and Gebara, J. M., 2006b. Assessment of Storm Sea Fastenings for Drilling
and Workover Rigs on Floating Production Systems during Hurricane Ivan. In:
Proceedings of the Offshore Technology Conference, OTC 18324. Houston, TX.
Yang, C.K., 2009. Numerical Modeling of Nonlinear Coupling between Lines/Beams
with Multiple Floating Bodies. Ph.D. Dissertation, Texas A&M University,
College Station, TX.