Force Sensing Technologies

Studies on Mechatronics
Autonomous Systems Lab
Prof. Roland Siegwart
Force Sensing Technologies
Spring Term 2010
Supervised by:
Janosch Nikolic
Author:
Contents
iii v
vi
1
Goal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
Structure of the Report . . . . . . . . . . . . . . . . . . . . . . . . .
1
2 Tactile Sensing Technologies
3
. . . . . . . . . . . . . . . . . . . . . . .
3
Whiskers and Antennae . . . . . . . . . . . . . . . . . . . . .
3
Mechanical Displacement . . . . . . . . . . . . . . . . . . . .
4
Pneumatic Touch Sensor and Foil Switches . . . . . . . . . .
4
Digital Tactile Sensor Array . . . . . . . . . . . . . . . . . . .
5
Capacitive Force Sensors . . . . . . . . . . . . . . . . . . . . . . . . .
5
Strain Gauges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
Metal Strain Gauges . . . . . . . . . . . . . . . . . . . . . . .
7
Semiconductor Strain Gauges . . . . . . . . . . . . . . . . . .
8
Piezoresistive Force Sensors . . . . . . . . . . . . . . . . . . . . . . .
8
Conductive Elastomers . . . . . . . . . . . . . . . . . . . . . .
8
Carbon Felt and Carbon Fibers . . . . . . . . . . . . . . . . .
9
Piezoelectric Force Sensors . . . . . . . . . . . . . . . . . . . . . . . .
10
Pyroelectric Force Sensors . . . . . . . . . . . . . . . . . . . . . . . .
10
. . . . . . . . . . . . . . . . . . . . . . . . . .
10
Frustrated Internal Reflection . . . . . . . . . . . . . . . . . .
10
Opto-Mechanical . . . . . . . . . . . . . . . . . . . . . . . . .
11
Fiber-Optic . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
Photoelasticity . . . . . . . . . . . . . . . . . . . . . . . . . .
14
Tracking of Optical Markers . . . . . . . . . . . . . . . . . . .
15
. . . . . . . . . . . . . . . . . . . . . . . . .
16
Hall Effect and Magnetoresistance . . . . . . . . . . . . . . .
16
Magnetoelastic . . . . . . . . . . . . . . . . . . . . . . . . . .
17
Ultrasonic Force Sensors . . . . . . . . . . . . . . . . . . . . . . . . .
18
2.10 Electrochemical Force Sensors . . . . . . . . . . . . . . . . . . . . . .
18
3 Evaluation of Force Sensing Technologies
21
25
Multi-Axes Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
Slip Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
Measuring Curvature . . . . . . . . . . . . . . . . . . . . . . . . . . .
25 i
27
Load Cells and Single Force Sensing Elements . . . . . . . . . . . . .
27
Description of the Parameters . . . . . . . . . . . . . . . . . . . . . .
28
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
6 Applications of Force Sensors
35
Surgical Applications . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
Rehabilitation and service Robotics . . . . . . . . . . . . . . . . . . .
35
Agriculture and Food Processing . . . . . . . . . . . . . . . . . . . .
36
Specific Applications of force sensors . . . . . . . . . . . . . . . . . .
36
37
39 ii
Abstract
This report contains an overview over the fundamental force sensing technologies with examples of manufactured sensors. These technologies are evaluated in terms of their applicability for docking maneuvers with unmanned helicopters. Force sensors that are available on the market are listed with their specifications and evaluated likewise. Furthermore, some additional features of certain sensing technologies are given and the field of applications of force sensors is described briefly. In a conclusion, the suited technologies and sensors are summarized and a recommendation for a force sensor to use on a helicopter is given.
iii
iv
List of Figures
Whisker contact sensor by Clements and Rahn [15] . . . . . . . . . .
3
Mechanical transducer with a linear potentiometer [2] . . . . . . . .
4
Cross-section view of the pneumatic touch sensor [1] . . . . . . . . .
5
Digital tactile Array sensor [1]
. . . . . . . . . . . . . . . . . . . . .
6
. . . . . . . . . . . . . . . . . . . . . . .
7
Typical metallic strain gauge pattern [36] . . . . . . . . . . . . . . .
7
Piezoresistance using a separator [1] . . . . . . . . . . . . . . . . . .
9
Carbon felt tactile sensor [1] . . . . . . . . . . . . . . . . . . . . . . .
9
Tactile sensor based on frustrated internal reflection [1]
. . . . . . .
11
2.10 Detecting shear forces with a microlever [1] . . . . . . . . . . . . . .
11
2.11 An opto-mechanical array touch sensor [1] . . . . . . . . . . . . . . .
12
2.12 Optical fiber sensor based on varying coupling between crossed fibers
[1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
2.13 Light radiation due to microbending [1] . . . . . . . . . . . . . . . .
13
14
2.15 Measuring stresses using photoelasticity [1]
. . . . . . . . . . . . . .
15
2.16 Photoelastic sensor [1] . . . . . . . . . . . . . . . . . . . . . . . . . .
15
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.18 Magnetoresistive sensor using current-carrying wires [1]
. . . . . . .
17
2.19 Magnetoresistive sensor using magnetic dipoles [1]
. . . . . . . . . .
17
2.20 Changes in flux distribution caused by applied force [1] . . . . . . . .
18
2.21 Tactile sensor using ultrasonic pulses to detect elastic skin thickness
[1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
2.22 Schematic diagram of the streaming potential sensor [1] . . . . . . .
19
ATI Nano17 6-axis force and torque transducer . . . . . . . . . . . .
27
A Honeywell FSS1500NSB force sensor . . . . . . . . . . . . . . . . .
28
FlexiForce foil sensor . . . . . . . . . . . . . . . . . . . . . . . . . . .
28 v
List of Tables
General advantages and disadvantages of different sensor technologies 22
General advantages and disadvantages of different sensor technologies
(continued) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
24
Different force sensing elements with their specifications . . . . . . .
30
Different force sensing elements with their specifications (continued)
31
Some examples of special force sensors that are available on the market 32
vi
Chapter 1
Introduction
1.1
Goal
The goal of this report is to collect information about existing technologies and products for force sensing devices.
The existing technologies and the available sensors on the market should be described and evaluated. The evaluation refers to the suitability of these technologies and particular sensors for docking maneuvres with an unmanned rotorcraft. Preferred attributes of the force sensor are low weight, small size, robust especially in the sense of shock resistance, low price and a simple construction in case it has to be customized.
1.2
Structure of the Report
This report is organized as follows: Chapter 2 introduces the different force sen-
sor technologies. It explains all the fundamental transduction methods for force
sensing. In Chapter 3, this technologies are evaluated and their advantages and
disadvantages are registered. Additional features of sensors that some technologies
provide besides sensing of normal forces are explained in Chapter 4. Common force
sensors that are available on the market are presented in Chapter 5 together with
their properties as far as known. Chapter 6 presents the main fields where force
sensors are applied as well as some specific applications of commercial force sensors.
In the last Chapter, conclusions, based on the evaluation of sensor technologies and sensors on the market, are drawn regarding docking maneuvers with unmanned rotorcrafts.
1
Chapter 1. Introduction 2
Chapter 2
Tactile Sensing Technologies
This chapter gives an overview and a description of the function principle of the known force sensor technologies. A concrete example with a figure for illustration is given to the described technologies. The technologies presented here are for the
most part fundamental transduction methods presented by Russell [1] and Nicholls
[2] as well as from chapter 19 of the Handbook of Robotics [7]. The books of Russell
and Nicholls were published in the year 1990 and 1992 respectively. But according
to newer literature by Lee and Nicholls [6], most of the possible forms of physical
transduction methods have now been explored and there seems little scope for new fundamental transducers. So the fundamental transduction methods are still the same. The current research offerings are mainly concerned with novel packagings, better designs, improved engineering and more complete analysis.
2.1
Mechanical Tactile Sensors
2.1.1
Whiskers and Antennae
Whisker or antenna sensors are in essence a hybrid of proprioceptive and tactile information. The main components of the earliest sensors of this type are a base angle sensor and a tip contact sensor to explore the environment. This simple assembly provides information whether contact occurs and if so, also the contact location. For many animals, whiskers or antennae provide an extremely accurate combination of contact sensing and proprioceptive information. Examples of such
sensors are reported by Kaneko [14] or Clements and Rahn [15].
Figure 2.1: Whisker contact sensor by Clements and Rahn [15]
3
Chapter 2. Tactile Sensing Technologies 4
2.1.2
Mechanical Displacement
This kind of force sensors rely on a mechanical displacement caused by an applied force. The simplest example is a spring loaded switch giving on-off contact readings.
A linear potentiometer provides a graded scale of deflection, and the output can
be considered in terms of either force or linear displacement (see Figure 2.2). A
common example of mechanical displacement in simple touch sensors is the move-
ment of a linear probe. For example, Presern et al. [16] designed a three degrees of
freedom probe for arc welding applications where it is intended for seam tracking.
Figure 2.2: Mechanical transducer with a linear potentiometer [2]
2.1.3
Pneumatic Touch Sensor and Foil Switches
A switch is one of the simplest touch-actuated devices for detecting the presence of an object. A very simple and small form of a switch are foil layers as they are used in cheap calculator keyboards. These switches use two foil layers with a conductor and one layer to separate them. If enough force is applied the two external layers are pressed together and contact between the two conductors is produced.
Pneumatic touch sensors are more complex than foil layers but work in a similar way. Usually, pneumatic touch sensors are built by a shallow spherical dome made of thin sheet metal. When a critical value of force is applied the dome collapses with a click, and later returns to its original shape as the force is removed.
As the dome collapses, electrical contact with an electrode on the inside of the dome is produced. The sensor sensitivity varies with different geometries and material
properties of the dome as well as with its pressure inside. Figure 2.3 shows a cross-
section view through part of a pneumatic sensor array by Garrison and Wang [11].
The sensitivity of this sensor can be varied by changing the pressurized fluid inside the domes. The single sensing elements are spaced 2 .
54 mm apart.
5 2.2. Capacitive Force Sensors
Figure 2.3: Cross-section view of the pneumatic touch sensor [1]
2.1.4
Digital Tactile Sensor Array
A simple switch indicates only whether or not the applied force exceeds a set threshold. With a closely grouped array of switches, each having a different threshold, the magnitude of an applied force can be estimated. For example, this can be implemented with a conductive, elastic material pressed against a V-shaped notch as
illustrated in Figure 2.4. More pressure is required to force the elastomer into the
notch as the width of the notch narrows. Commonly, a row of aluminium pads deposited along the bottom of the notch forms one electrode and a sheet of conductive elastomer makes the other electrode. Like this a small array of switches, with each switch in the array having a different pressure threshold, can be produced. Linear, logarithmic, or exponential response to pressure can be obtained by varying the shape of the notch. An advantage of this sensor design is that no analog-to-digital converter is necessary. A disadvantage of this sensor is that the fragile silicon chip is close to the point of contact with external objects. A tactile sensor array based
on this idea has been constructed by Raibert [12] where a sheet of elastic material
is pressed against a round hole.
2.2
Capacitive Force Sensors
Over small distances capacitance can be used to measure the separation between two conductive plates. In principle, capacitance can be used to measure both shear and normal forces. Shear forces can alter the area of overlap between two plates and normal forces can affect the plate separation. However, it is difficult to separate the two effects when trying to measure both at the same time. An example of an
capacitive sensor array constructed by Siegel et al. [13] is shown in Figure 2.5. This
sensor uses a set of row and column electrodes which are spatially separated by a dielectric. A multiplexing scheme allows the capacitance at the cross point of any row and column electrode to be measured and hence the deflection at that point is determined. Capacitive sensor arrays can be molded and provide very accurate measurements of skin deflection. The properties of the sensor, in terms of hysteresis, creep, memory, non-linearity, etc., are governed by the elastic material between the capacitor plates.
Chapter 2. Tactile Sensing Technologies 6
Figure 2.4: Digital tactile Array sensor [1]
7 2.3. Strain Gauges
Figure 2.5: Capacitive touch sensor [1]
2.3
Strain Gauges
Strain gauges are a common tool to measure forces and are often applied in commercial force sensors. So even if semiconductor strain gauges belong to the category of piezoresistive force sensors they are described in this separate section. For measurements of small strain, semiconductor strain gauges are often preferred over foil gauges. Still both types of strain gauges are presented and their differences and advantages are explained.
2.3.1
Metal Strain Gauges
A strain gauge consists of an insulating flexible backing which supports a metallic
foil pattern. A typical pattern is shown in Figure 2.6 which measures strain in
longitudinal direction. The strain gauge is attached to the object by a suitable adhesive. When the conductive metallic foil is stretched within the limits of its elasticity, it will become narrower and longer, changes that increase its electrical resistance. The pattern with several paths in parallel increases the effect of a change in the total resistance. From the electrical resistance of the strain gauge, the amount of applied stress may be inferred typically using a Wheatstone bridge. By using the material properties of the object which the gauge is attached to, also the applied force can be calculated.
Figure 2.6: Typical metallic strain gauge pattern [36]
Chapter 2. Tactile Sensing Technologies
2.3.2
Semiconductor Strain Gauges
Additionally to the change of resistance due to the geometrical change of the conductor in metal strain gauges, the resistance of piezoresistive strain gauges also change because of the new mechanical state of stress. This new state of stress changes the relative resistance of the piezoresistive material. So the change of the total resistance consists of a geometric part and a material specific part. The total resistance with respect to the strain is given by
R ( ε ) =
% ( ε ) l ( ε )
A ( ε )
(2.1) with
% ( ε ) = %
0
(1 + πε ) l ( ε ) = l
0
(1 + ε )
A ( ε ) = A
0
(1 − νε )
2
(2.2)
(2.3)
(2.4)
This can be transformed into
∆ R
= (1 + 2 ν + π ) ε = Kε
R
0
(2.5)
Where ∆ R is the change in resistance, R
0 is the resistance of the unstressed gauge,
ν is the Poisson’s ratio of the conductor, π is a factor of the change of the relative resistance due to strain and ε is the strain. The factor (1 + 2 ν + π ) is called the K-factor and is a measure of the sensitivity of the strain gauge. For metallic foil gauges, the K-factor is around 2.1 and is dominated by the deformation. For semiconductor strain gauges the change of the total resistance is based up to 98% on the change of the specific resistance. Semiconductor strain gauges can reach
K-factors of up to 150 which allows stiffer deformable elements of the sensor. This large sensitivity is the major advantage of semiconductor strain gauges. In addition, semiconductor techniques allow much smaller strain gauges than metal strain gauges. The major disadvantage of semiconductor strain gauges is that they are more sensitive to temperature changes and they are not as robust as metal strain
gauges. Erler [9] discusses the properties of semiconductor strain gauges in detail
in Chapter 6 of his book.
2.4
Piezoresistive Force Sensors
2.4.1
Conductive Elastomers
Conductive elastomers are insulating natural or silicone-based rubbers made conductive by adding particles of conducting or semiconducting materials such as silver or carbon. Most of these forms of conductive rubber show little change in bulk resistance as they are compressed. However, area of contact and hence inverse contact resistance can be made to vary with applied force. An example of a sensor using
conductive elastomers described by Hillis [17] is shown in Figure 2.7. The elastomer
and the contact pad are separated by a woven mesh of a nylon stocking which gives no contact, hence infinite resistance, for zero normal force. At a certain threshold force the conductive elastomer makes contact with the electrode. Additional force increases the area of contact and thus reduces the contact resistance. The sensor of
Hillis has an array of 256 tactile sensor elements in the area of 1 cm 2 and a sensing range of 1-100g.
8
9 2.4. Piezoresistive Force Sensors
Figure 2.7: Piezoresistance using a separator [1]
2.4.2
Carbon Felt and Carbon Fibers
Larcombe [28] has described piezoresistive sensors constructed by sandwiching car-
bon felt and carbon fibers between metal electrodes as shown in Figure 2.8. As
the load increases, the carbon fibers are compacted together, making more electrical contacts and reducing the felt resistance. At loads in excess of 5 kg the area of contact between touching fibers starts to increase and this leads to a further reduction in resistance. Carbon fiber and carbon felt sensors are rugged and can be shaped. They withstand very high temperatures and considerable overloads. A disadvantage of this sensor is a great deal of electrical noise with a load of less than
10 g. However, these sensors are very robust and well suited for sensing in very inhospitable environments.
Figure 2.8: Carbon felt tactile sensor [1]
Chapter 2. Tactile Sensing Technologies 10
2.5
Piezoelectric Force Sensors
The piezoelectric effect gets crystals of quartz to produce an electrical voltage when pressure is applied to the crystal. The piezoelectric effect only occurs in crystals which do not have a center of symmetry. Depending on the design of the sensor, different modes to load the piezoelectric element can be used: longitudinal, transversal and shear. The voltage generated across a sensing element is proportionally related to the applied pressure. If a load is maintained, then the sensor output decays to zero. Therefore, these sensors are most suited for sensing dynamic forces. One of the most common material used for piezoelectric sensors is a polymer known as polyvinylidene fluoride (PVF
2 or PVDF). PVF
2 has good mechanical properties, is a durable material and shows one of the largest piezoelectric effect. Its flexibility, sensitivity, and large electrical output offer many advantages for touch sensors in particular. Piezoelectric materials are also pyroelectric as described in the next section. A problem with materials that are both piezoelectric and pyroelectric is separating the two effects, thus protection from thermal variations may be necessary
if pressure variations are important. Dario and Buttazzo [19] have developed a skin-
like sensor based on PVF
2 film. This sensor contains two force-sensing layers and has the additional capability of sensing thermal properties. The sensing elements are arranged in a hexagon at 5 mm spacing. A similar sensor built by Dario et al.
[20] has a dynamic range of 4000:1, where load over 0
.
01 − 40 N were established.
2.6
Pyroelectric Force Sensors
Correspondingly to the piezoelectric effect, the pyroelectric effect is the generation of a voltage when the sensing element is heated or cooled. As piezoelectric sensors, pyroelectric sensors are inherently dynamic which means that the sensor output decays to zero if the temperature is constant. The above presented PVF
2 material is also highly pyroelectric. A pyroelectric sensor consists of a pyroelectric element and a heat source. The heat source causes the device to heat up. When an object touches the sensor surface, heat flows from the sensor into the object ore vice versa if the object is hotter than the sensor. The resulting temperature change can then be measured. The pyroelectric effect is not well suited to measure scaled forces but has to be taken into account when building a piezoelectric sensor (Dario and Buttazzo
[19]). In return, a pyroelectric sensor is well suited to detect slip on a surface. If
the sensor has no slip, the surface temperature at the point of contact becomes the same as the sensor temperature. As soon as the sensor moves, a temperature change and therefore slip can be detected.
2.7
Optical Force Sensors
2.7.1
Frustrated Internal Reflection
A sheet of clear plastic can act as a light guide. Light introduced at one edge will propagate across the sheet by total internal reflection and emerge at the opposite edge. Total internal reflection occurs when light is propagating in the denser of two media and strikes the interface at an angle larger than a particular critical angle with respect to the normal to the interface. When the surface of the light guide comes into contact with an external object then at that point total internal reflection is frustrated and light emerges from the opposite side of the light guide.
In practice , a reflective rubber is placed on the light guide to protect it and to
exclude external light as it is shown in Figure 2.9. If the rubber sheet is molded
with a textured surface then an output proportional to the area of contact, and
11 2.7. Optical Force Sensors
hence applied force, can be obtained (Tanie et al. [22]). The light which emerges
from the back of the light guide is detected either by an array of photodiodes, solid state optical sensors, or transported away from the sensor by optical fibers. This kind of sensor can also be made sensitive to shear forces in the reflective rubber
material as the microlever proposed by Dario et al. [21] that is illustrated in Figure
Figure 2.9: Tactile sensor based on frustrated internal reflection [1]
Figure 2.10: Detecting shear forces with a microlever [1]
2.7.2
Opto-Mechanical
The Lord Corporation produced an opto-mechanical touch sensor as shown in Figure
It contains a rubber skin with an array of mushroom-shaped projections
molded into its surface (Rebman and Morris [23]). The head of the mushroom
concentrates the normal force and the stalk acts as an optical shutter to modulate light transmission between a light-emitting diode and a photo detector depending upon normal force. Because the deflecting element is made of rubber, the sensor response will be subject to the usual problems of creep, hysteresis, memory, and temperature variation. The Lord LTS-210 for example consists of an array of optomechanical force sensors on a 1 .
8 mm spacing. The Construction of this sensor is quite labor intensive.
Chapter 2. Tactile Sensing Technologies 12
Figure 2.11: An opto-mechanical array touch sensor [1]
2.7.3
Fiber-Optic
Light Coupling Between Adjacent Fibers
Light propagates along an optical fiber with very little lost due to radiation; however, if the surface of the fiber is roughened then at that point light can leave and enter the fiber. If two optical fibers pass close to each other and both have a roughened surface then light can pass between the fibers. The sensor design shown in
Figure 2.12 uses D-section cords made of rubber as a deformable member and the
light coupling between crossed plastic optical fibers to measure the resulting deflection. A 4x4 array with 1 cm
spacing has been reported by Schoenwald et al. [24].
Loads applied normal to the sensor surface compress the D-section elastomer cords moving the fibers closer together and thus increases the light coupling. This sensor is flexible and can conform to complex curved surfaces. It has the advantage of noise immunity associated with optical transducers and the imperfections introduced by the use of elastomer materials as the deformable member.
Figure 2.12: Optical fiber sensor based on varying coupling between crossed fibers
Bending Losses in Optical Fibers
Light propagates through an optical fiber by repeated internal reflection from the cladding interface.
For total internal reflection to occur, light must strike this surface at an angle greater than a critical angle with respect to the normal to the surface. If the fiber is subjected to a significant amount of bending over a length comparable to the distance between successive internal reflections then the angle of
13 2.7. Optical Force Sensors incidence can be reduced sufficiently for the light to leave the core. This effect is
illustrated in Figure 2.13. Under these conditions of microbending, the amount of
light transmitted by an optical fiber is greatly reduced. This effect has been put to use in microbend touch sensors. An experimental 2x2 robot sensor has been
reported by Winger and Lee [25]. This sensor is capable of detegting a 5
g variation in applied load in its linear region which ranges between 125 g and 225 g per sensor element. Hysteresis proved to be a large problem and this was thought to be caused by the cladding material.
Figure 2.13: Light radiation due to microbending [1]
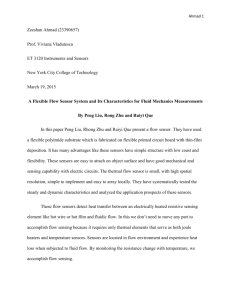
Optical Skin Thickness Sensor
Figure 2.14 shows a cross-section of a sensor that determines the thickness of a
transparent, deformable elastomer layer by measuring the intensity of light reflected back from the far side of the layer. Light is introduced into the sensor via an optical fiber. A widening cone of light propagates out through a layer of transparent elastomer and is reflected by an outer skin of white elastomer. The reflected light is received by a second fiber which is viewed by a computer vision system to measure the reflected light. When an external force compresses the transparent elastomer this shortens the distance travelled by the light cone, limiting the light dispersion and thus reducing the light gathered by the receiving fiber. A sensor described by
Schneiter and Sheridan [26] contains 2100 sensitive points per square inch (6
.
45 cm
2
) and exhibits a dynamic range of only 18:1. This sensor is very labor intensive since each optical fiber was positioned by hand and it is rather frail since the clear rubber material was found to fatigue after only a few hundred operating cycles.
Chapter 2. Tactile Sensing Technologies 14
Figure 2.14: Tactile sensor based on a deformable elastic reflective surface and
2.7.4
Photoelasticity
Photoelasticity can be used to measure stresses in a sample of optically active
material. Consider the experimental set-up shwon in Figure 2.15.
(a) Light radiated from a light source contains many waves of differing polarization and amplitude. Both polarization and amplitude vary with time.
(b) Polarizer 1 only allows through components of each wave having a particular plane of polarization, and blocks those components which are at right angles.
(c) Upon entereing the birefringent material light is split into two components, polarized at right angles. These components are aligned with the planes of maximum and minimum stress in the material.
(d) If the two waves emerge from the birefingent material with the same relative phase that they had when they entered then the original wave is reconstructed.
(e) Polarizer 2 is rotated 90
◦ with respect to polarizer 1 and therefore blocks transmission of the reconstructed wave.
If the two waves do not emerge with the same relative phase that they had when they entered the birefringent material then an elliptically polarized wave results.
Part of this elliptically polarized wave is passed by polarizer 2. Dark areas, or
“fringes”, where light is not transmitted through the system, are the result of two effects:
1.
Isoclinics: Areas where light from polarizer 1 is in line with one of the principal stress axes. In this case the light is not split into two components and therefore emerges unaltered. This effect provides information about the orientation of principal stresses in the birefringent material.
2.
Isochromatics: Result when light is split by the birefringent material but emerges with the same phase that it entered. This will be true if the principal stresses in the material are identical or differ by an amount which produces an integral number of phase rotations.
An example of such a sensor was developed by Cameron et al. [27] and is shown
in Figure 2.16. It measures the forces applied to a sheet of birefringent material.
The sheet of birefringent material is illuminated by circularly polarized light to visualize isochromatic fringes. A CCD camera records the resulting stress pattern.
15 2.7. Optical Force Sensors
The camera image can be analysed to determine the distribution of stresses within the birefringent material.
Figure 2.15: Measuring stresses using photoelasticity [1]
Figure 2.16: Photoelastic sensor [1]
2.7.5
Tracking of Optical Markers
This principle is based on the idea of using deformable tactile sensors. It combines optical tracking with models of the sensors skin to predict the sensor skin deformation. The sensor skin consists of markers on the inside which are tracked by a tiny CCD camera. The measured data of the camera is then combined with the mechanical model of the skin to derive its deformation and the applied force on the
skin. Ferrier and Brocket [29] implemented a tactile sensor with a CCD camera
focused on a 7x7 array of dots that are marked on the inside of a gel-filled silicone fingertip membrane. An algorithm is then used to construct a 13x13 grid over the array of dots. Another interesting tactile sensor uses vision to track an array of spherical markers embedded in a transparent elastomer to infer the stress state of the skin material due to applied force. This sensor is commercialized under the tradename GelForce by the Tachi Lab
Chapter 2. Tactile Sensing Technologies
2.8
Magnetic Force Sensors
16
2.8.1
Hall Effect and Magnetoresistance
The Hall effect is closely related to the motor effect observed as a force on a current-
carrying conductor in a magnetic field. In Figure 2.17, if charge carriers (1) flow
through a conductive material (2) and a magnetic flux (4) is established, then they experience a force orthogonal to their flow direction and the magnetic field direction.
This deflection of the charge carriers is then producing a resulting Hall potential in direction of the deflection which can be measured. Due to this deflection of the charge carriers, they take a longer path to travel the length of the conductive material. Effectively the deflected particles have a lower mobility and this shows as an increased electrical resistance. This effect is known as magnetoresistance.
Both the Hall effect and magnetoresistance can be used to measure magnetic field intensity. Note that a Hall effect sensor is only sensitive to magnetic fields in one direction while the magnetoresistive effect can be used to detect magnetic field having any orientation within a plane normal to the current flow. A schematic
example of a magnetoresistive sensor is shown in Figure 2.18. The magnetic field
is provided by current-carrying wires within an elastomer. When the elastomer is compressed, a change of the magnetic field in the magnetoresistive element can
be measured. Hackwood et al. [30] developed a magnetoresistive sensor that can
measure normal forces, tangential forces and torques. In this sensor design, a sheet of silicone elastomer contains an array of embedded magnetic dipoles (see Figure
2.19). Beneath each dipole four Permalloy magnetoresistive sensors are mounted
on a rigid substrate. Magnetic field strength at each of the four magnetoresistive sensors is used to determine both position and orientation of the magnetic dipole.
17 2.8. Magnetic Force Sensors
Figure 2.18: Magnetoresistive sensor using current-carrying wires [1]
Figure 2.19: Magnetoresistive sensor using magnetic dipoles [1]
2.8.2
Magnetoelastic
Magnetoelastic sensors are made from a magnetostrictive material. These materials change their magnetic permeability when they are deformed. The sensor element
shown in Figure 2.20 contains two windings arranged at right angles. In the un-
stressed condition the magnetostrictive material is isotropic and hence there is no flux coupling between the two windings and no output voltage at the secondary winding. When a force is applied to the sensor the permeability of the magnetostrictive material decreases in the vertical and increases in the horizontal direction. This changes the magnetic field of the primary winding in such a way that flux links the secondary winding and an output voltage is produced in the secondary winding. A sensor array of 16x16 magnetoelastic sensor elements with 2 .
5 mm spacing has been
reported by Luo et al. [31]. The sensor array was covered by a sheet of elastomer to
provide protection and an improved gripping surface. Good sensitivity and linearity, and low hysteresis are claimed for the sensor but the sensors and their associated circuits are relatively complicated.
Chapter 2. Tactile Sensing Technologies 18
Figure 2.20: Changes in flux distribution caused by applied force [1]
2.9
Ultrasonic Force Sensors
Ultrasound has been in use for a long time to measure the thickness of objects. We can measure the time taken for an ultrasonic pulse to travel through the material, reflect off the back surface and return. If the speed of propagation of the ultrasonic wave in the material is known then the material thickness can be calculated. This principle can be used to measure the thickness of a flexible elastomer layer at many closely spaced points. Like this the deformation of the elastomer can be measured as
it is shown in Figure 2.21 and the pressure applied on its surface can be calculated.
Grahn and Astle [32] claim a dynamic range of 2000:1 and a spatial resolution
of 0 .
5 mm for their ultrasonic force sensor. If the sensor is immersed in a liquid or touches an object with a similar acoustic impedance to the skin material, it is possible that the ultrasonic pulse propagates past the surface of the skin material without being reflected. So attention has to be paid on the material properties of the sensor surface and the objects that should be touched.
Figure 2.21: Tactile sensor using ultrasonic pulses to detect elastic skin thickness
2.10
Electrochemical Force Sensors
Chemical-impregnated gels have been formulated to make them sensitive to defor-
mation. The sensor shown in Figure 2.22 by De Rossi et al. [33] uses a gel that
contains an immobile negative charge which is balanced by a mobile positive charge.
An ionized gel disk 1 cm in diameter and 0 .
4 − 0 .
5 mm thick is made from polyacrylic
19 2.10. Electrochemical Force Sensors acid and polycinylic acid. When pressure is applied to the gel, positively charged liquid is forced out of the gel and an inhomogeneity of charge is formed which constitutes the streaming potential. This potential is picked up by two thin electrodes.
The sensor can detect low-frequency deformations but has no steady state response.
Figure 2.22: Schematic diagram of the streaming potential sensor [1]
Chapter 2. Tactile Sensing Technologies 20
Chapter 3
Evaluation of Force Sensing
Technologies
First, a few terms which are needed for the evaluation of the force sensing technologies are explained.
1.
Dynamic Range: The ratio of largest to smallest detectable force.
2.
Spatial Resolution: The space that one single sensing element takes. So for an Array sensor the spatial resolution gives the amount of single sensing elements that can be placed in a given length or area.
3.
Inherently Dynamic: Sensor output decays to zero for constant load.
A very general evaluation of the different sensor technologies is given in Table 3.1
and Table 3.2. Due to the fact that most of the technologies are only applied in
research it makes no sense to give specific characteristics of the built sensors since they vary very much between different sensor designs within the same technology.
Some specific examples are given in Chapter 2 to give an impression on the limita-
tions of the corresponding technology.
Table 3.3 categorizes the technologies with respect to the desired sensor properties
introduced in Section 1.1. In this table “++” denotes very good or well suited and
“ −− ” denotes bad or not at all suited.
21
Chapter 3. Evaluation of Force Sensing Technologies 22
Table 3.1: General advantages and disadvantages of different sensor technologies
23
Table 3.2: General advantages and disadvantages of different sensor technologies
(continued)
Chapter 3. Evaluation of Force Sensing Technologies 24
Table 3.3: Sensor technologies categorized with respect to the desired sensor properties
Chapter 4
Additional Sensor Features
4.1
Multi-Axes Sensors
Load cells (see Section 5.1) usually measures forces and torques in multiple axis.
But also some of the presented fundamental force sensing technologies are able to measure more than just normal force in one direction.
A sensor based on frustrated internal reflections for example have been made sensi-
on the design of the sensor, different modes to load the piezoelectric element can be used: longitudinal, transversal and shear. A further example is the sensor described
in Section 2.8.1 by Hackwood et al. [30] is illustrated in Figure 2.19. This hall effect
sensor can measure normal and shear forces as well as torques.
4.2
Slip Detection
Several force sensing technologies can also be used to detect slip.
Pyroelectric
sensors (see Section 2.6) are well suited to detect slip by measuring a change in
the temperature as soon as the sensor starts to move along a touched object. Also
carbon felt sensors (see Section 2.4.2) have been used to detect slip by measuring the
noise due to the friction at the contact point. A capacitive sensor which is capable
of detecting slip is described by Luo [34]. This sensor uses the change in capacitance
caused by relative contact movement between sensor and object. The contacting sensor surface comprises a set of parallel rollers. Each roller is a half cylinder of conductive material, and a half cylinder of nonconductive material and therefore act as a variable capacitor. Other approaches have been realized by detecting the sound generated by movement against the sensor surface with piezocrystal microphones.
Of course there are many other approaches to detect slip, which are not discussed here.
4.3
Measuring Curvature
Provancher and Cutkosky [10] have built a sensor that can measure the curvature
of a touched object. The sensor consists of an array of strain gauges embedded in a compliant membrane. The curvature is estimated with a least squares procedure with the measurements of all the strain gauges. The resulting sensor is inexpensive and robust and can be used for object handling and exploration. The curvature
25
Chapter 4. Additional Sensor Features 26 measurements provide information for manipulation planning and control and provide an estimate of the local object geometry.
Chapter 5
Force Sensors on the Market
5.1
Load Cells and Single Force Sensing Elements
There are two different main fields of force sensors on the market. One are so called
Load cells (see Figure 5.1) and the other are small single sensing elements. These
sensing elements are based on piezoresistive transduction and can again be split up in two categories, namely sensors that use some sort of steel ball to concentrate
where the applied forces and torques are measured by semiconductor strain gauges
(see Section 2.3.2). Usually 6-axis transducers can be found on the market. Mostly
these load cells are designed for large industrial applications and can measure large forces up to hundreds of kilo Newton.
Since they are rather large, heavy and expensive they are not considered in this report which focuses on applications on a small helicopter. The smallest available 6-axis transducer is the ATI Nano17 shown
in Figure 5.1. Its properties and performances can be found in Table 5.3. With its
size of 17 mm in diameter and 15 mm height and a weight of 9 g it would also be suitable for applications on a unmanned helicopter. Nonetheless such a transducer will not be first choice since it is very expensive and force and torque measurements in all axis together is hardly required for docking maneuvers with a helicopter.
Figure 5.1: ATI Nano17 6-axis force and torque transducer
27
Chapter 5. Force Sensors on the Market 28
Figure 5.2: A Honeywell FSS1500NSB force sensor
Figure 5.3: FlexiForce foil sensor
5.2
Description of the Parameters
In this section the parameters which are used to evaluate the sensors found on the
market are explained in case their meaning or definition is not clear. In Tables 5.1
Span ] can be found for different parameters. This denotes the relative error compared to the whole span of the sensor.
1.
Range: The range of forces which the sensor is dimensioned for. In Tables
5.1 and 5.2 the forces are given in [
N ] but one can often find the unit [ kg ] or
[ kgf ] which means the force corresponding to the declared mass in a 9 .
81 m/s 2 gravitational field. For array sensors the range is given in [ P a ].
2.
Dynamic Range: The ratio of largest to smallest detectable force.
29 5.3. Sensors
3.
Over Force: The maximum force which may safely be applied to the sensor for it to remain in specification once force is returned to the operating force range.
4.
Sensitivity: The ratio of output signal change to the corresponding input force change. Sensitivity is determined by computing the ratio of Span to the specified operating force range.
5.
Span: The algebraic difference between output signal measured at the upper and lower limits of the operating force range. Also known as “full scale output” or simply “span”. For some sensors only the output resistance difference is declared.
6.
Linearity Error: The maximum deviation of the true response to the best fit straight line (BFSL).
7.
Repeatability: The maximum difference between output readings when the same force is applied consecutively, under the same operating conditions, with force approaching from the same direction within the operating force range.
8.
Temperature: The temperature range over which the product will produce an output proportional to force but may not remain within the specified performance limits. This is the operating temperature range, the storage temperature range may be different.
9.
Mechanical Hysteresis: The maximum difference between output readings when the same force is applied consecutively, under the same operating conditions, with force approaching from opposite directions within the operating force range.
10.
Elements: The number of simple sensing elements contained in an array sensor.
11.
Resolution: The distance between to simple sensing elements in an array sensor.
5.3
Sensors
This Section presents the sensors that were found on the market at different dis-
tributors. In Table 5.1 and Table 5.2 standard single element force sensors are
presented. Table 5.3 presents some special sensors such as sensor arrays and a 6-
axis transducer. The introduced properties of each sensor are gathered from data sheets that were found in the internet. Since the quality and contained information of the data sheets varies very much not every property could be evaluated for each of the presented sensors.
Chapter 5. Force Sensors on the Market 30
Table 5.1: Different force sensing elements with their specifications
31 5.3. Sensors
Table 5.2: Different force sensing elements with their specifications (continued)
Chapter 5. Force Sensors on the Market 32
Table 5.3: Some examples of special force sensors that are available on the market
33 5.3. Sensors
We can now generally evaluate the three different sensor categories on the market
in terms of the desired properties described in Section 1.1.
1.
Load Cells: As mentioned before, load cells are constructed for large forces and therefore are also very robust. But they have some crucial disadvantages for applications on a small helicopter. They are very expensive, rather large and heavy.
2.
Silicon-sensing Elements: These elements are small, light and not too expensive. But they have one major disadvantage, which is their robustness.
Their sensing range goes only up to around 15 N and their over force is only around 45 N which can already be reached when the helicopter bounces against a wall.
3.
Foil Sensors: These sensors are very light, small (especially thin) and very cheap. Sensors for forces up to 445 N are available which is entirely sufficient for applications on a small helicopter. So generally these sensors fit the desired properties very well.
Chapter 5. Force Sensors on the Market 34
Chapter 6
Applications of Force Sensors
During the 1980s, most authors predicted that the major application area for tactile sensing would be industrial automation tasks such as robotic assembly. However, the demand for such sensors proved to be low. There are still very few fully developed applications of tactile sensing but this chapter considers current trends. We see three main fields where tactile sensing is likely to play a key role. These are: medical procedures, especially surgery; rehabilitation and service robotics; and agriculture and food processing. In addition, some examples of applications using commercial force sensors are given.
6.1
Surgical Applications
Surgery is perhaps the most exciting and rapidly developing area where tactile sensing is actually of central importance. Minimally Invasive Surgery (MIS) is still a young method but is now routinely used as the preferred choice for many operations. However, despite its advantages, MIS severely reduces the surgeon’s sensory perception during manipulation. Surgery is essentially a visual and tactile experience and any limitations on the surgeon’s sensory abilities are most undesirable.
For example, in laparoscopy long slender tools are inserted through small puncture openings in the abdominal wall and the surgeon uses a range of tip mounted instruments guided by video feedback images. As the instruments are rigid rods and effectively have fixed pivots at the entry points, the available degrees of freedom are restricted. This is one of the main difficulties together with lack of depth from
2D vision and the almost complete lack of sense of touch. The reason that tactile sensing is so important in surgery is that soft tissue can only be properly examined and identified by assessing its softness, viscosity and elasticity properties. So it is clear that tactile sensing is greatly needed in this area.
6.2
Rehabilitation and service Robotics
A major concern for the next century is the enormous numerical increase in the elderly population that will generate great economic pressures. This demographic change is well accepted and many governments have initiated programmes of research in health care, hospital services and social support. It is clear that there will be greatly increased demand on these services and researchers are looking for methods of support and assistance that do not involve central services but can be distributed as aids within the home and community.
Despite the contrast with industrial robotics, there are some emerging interests in human-robot cooperation within manufacturing. As the next stage in automation,
35
Chapter 6. Applications of Force Sensors 36
Toyota envisage workers and robot machines coexisting in a ‘safe partner’ relationship.
As yet there is little in this area that is new specifically concerning tactile sensing.
However, as for medicine, we can see many opportunities where sense of touch will be a real need.
6.3
Agriculture and Food Processing
The field of agriculture and food production is now well automated but, like service robotics, also does not feature many new technological advantages in tactile sensing. Uses of tactile sensing are often mundane, but the importance of this area is its potential for imminent development. Unlike manufacturing automation, the processing of natural produce usually involves high numbers of human operators.
This is because of the problems of handling soft, delicate and highly variable items by machine have not been solved at low enough cost. Recently, there has been increased interest in the prospect of reducing human involvement in order to reduce hygiene risks, eliminate human errors and use efficient but more hazardous environments.
6.4
Specific Applications of force sensors
Most of the research of tactile sensing in the field of robotics is made for producing robotic hands. It deals with the problem of gripping objects and therefore measuring contact forces and contact locations. Usually an array of force sensing elements is placed into the skin of the robotic hand to be able to measure contact over the whole surface of the hand. The goal of most of the technologies presented in Chap-
ter 2 is to build a robotic hand covered by an artificial skin.
Further applications are in human and robot interaction such as haptic devices used for rehabilitation. Another example are touch screens which are very popular nowadays and are mostly based on a resistive detection of the contact location.
Some also use capacitive techniques to detect contact on the surface.
The Tachi Lab
[37] developed some very interesting applications of force sensing.
Their field of research is virtual reality. They have several projects dealing with haptic interaction between humans and a virtual reality such as the GravityGrabber . They also did research on force sensing technologies and developed for example
GelForce
, a force sensor which uses tracking of optical markers (see Section 2.7.5)
to measure the distribution of both the magnitude and direction of force.
The most frequently applied force sensors are strain gauges. They are cheap and can be easily used in a custom application. A lot of larger commercial force sensors
are using strain gauges to measure the applied forces. Load cells (see Section 4.1)
for instance use several strain gauges to measure forces and torques in multiple directions. Another example of a sensor using strain gauges is explained in Section
Foil sensors such as produced by FlexiForce are also commonly used in commercial applications. One example are PlayStation controllers which have buttons that do not only have an on-off function but also a scaled input according to the applied force on the button.
Chapter 7
Conclusions
Over the past four decades, tactile sensing has developed into a sophisticated technology. There has been a long-standing and widely held expectation that tactile sensors would have a major impact on industrial robotics and automation. However, this promise has not been realized, and few, if any, tactile sensors can be
found in factory based applications [4]. The main fields where tactile sensing is
likely to play a key role are medical procedures, especially surgery; rehabilitation and service robotics; and agriculture and food processing. After all the production of new designs and configurations of sensors continues apace. However, most of the possible forms of physical transduction methods have now been explored and there seems little scope for new fundamental transducers. The basic transduction
methods are described by Russell [1] and Nicholls [2] and were already developed in
1990. The current research offerings are mainly concerned with novel packagings, better designs, improved engineering and more complete analysis.
The technologies that satisfy the requirements of a small, light, robust, simple and cheap force sensing element best, are mechanical displacement sensors, strain gauges and more advanced, a carbon felt and carbon fibers sensor. A carbon felt sensor may be considered for sensing in inhospitable environments and if large forces or shocks on the sensor are possible. The problem is that no commercial sensor using this technology is available and the development would be very time-consuming and expensive. Therefore it makes more sense to use strain gauges which are the most commercialised sensors that can measure forces. They are cheap compared to other force sensors and can be attached to a simple customized deformable element, such as a small metallic arc, at the end of the helicopter. Finally the simplest considerable solution is a self-built mechanical displacement sensor maybe combined with some kind of damping element to prevent the helicopter to bounce back from a touched object. Such a sensor could be developed very cheaply and can be adapted quite easily to a given task.
The commercial sensors presented in Chapter 5 are nearly all based on piezore-
sistive technologies. Sensors like those produced by Honeywell will most likely not be suitable for the purpose of docking maneuvers with a helicopter because the maximum force of 40 N which these sensors withstand and the actual range of 0 − 15 N is barely enough. Foil sensors such as FlexiForce have a much larger range of 0 − 440 N and are therefore more appropriate. A disadvantage for both of these sensor types can be that the movable part of the sensors can only perform small deflections. For instance if the helicopter is flying towards a wall, no damping of the impact can be realized just by the sensor, so one have to consider to build an assembly of such a sensor with some damping element.
37
Chapter 7. Conclusions 38
After all, the two force sensing methods that fit best for a helicopter are on the one hand mechanical displacement and on the other hand a customized assembly with
a foil sensor. Both fit the desired properties introduced in Section 1.1 very well and
are easy to build by yourself. Therefore, these two should be considered first and tested if their measuring performance is suitable.
Bibliography
[1]
R.-A. Russel
: Robot Tactile Sensing , Prentice Hall, New York; Sydney, 1990
[2] H.-R. Nicholls : Advanced Tactile Sensing for Robotics , World Scientific Publishing Co., Inc., 1992
[3]
H.-R. Nicholls, M.-H. Lee
: A Survey of Robot Tactile Sensing Technology,
The International Journal of Robotics Research , Vol. 8, No. 3, 1989, pp. 3-30
[4] M.-H. Lee : Tactile Sensing: New Directions, New Challenges, The International Journal of Robotics Research , Vol. 19, No. 7, 2000, pp. 636-643
[5]
R.-S. Fearing
: Tactile Sensing Mechanisms, The International Journal of
Robotics Research , Vol. 9, No. 3, 1990, pp. 3-23
[6] M.-H. Lee, H.-R. Nicholls : Tactile sensing for mechatronics–A state of the art survey, Mechatronics , Vol. 9, No. 1, 1999, pp. 1-31
[7]
M.-R. Cutkosky, R.-D.
Howe, W.-R. Provancher
: Handbook of
Robotics , Springer, 1990, Chap. 19
[8] J. Rausch : Engineering Haptic Devices , Springer, 2009, Chap. 10
[9]
W. Erler
: Elektrisches Messen nichtelektrischer Gr¨ widerst¨ , Verlag Technik, Berlin, 1973
[10] W.-R. Provancher, M.-R. Cutkosky : Sensing Local Geometry for Dexterous Manipulation, ISER , 2002, pp. 507-516
[11]
R.-L. Garrison, S.-S.-m. Wang
: Pneumatic touch Sensor, IBM Technical
Disclosure Bulletin , Vol. 16, No. 6, 1973, pp. 2037-2040
[12] M.-H. Raibert : An All Digital VLSI Tactile Array Sensor, Proceedings of the
IEEE International Conference on Robotics , 1984, pp. 314-319
[13]
D.-M. Siegel
, et al.: A Capacitive Based Tactile Sensor, SPIE Conference on
Intelligent Robots and Computer Vision , Cambridge, Massachusetts, 1985, pp.
153-161
[14] M. Kaneko, N. Ueno, T. Tsuji : Active antenna-basic considerations on the working principle, Proceedings of the IEEE International Conference on
Intelligent Robotic Systems , Vol. 3, 1985, pp. 1744-1750
[15]
T.-N. Clements, C.-D. Rahn
: Three-dimensional contact imaging with an actuated whisker, IEEE International Conference on Intelligent Robotic Systems , 2005, pp. 598-603
[16]
S. Presern, F. Dacar, M. Spegel
: Design of three active degrees of freedom tactile sensor for industrial arc welding robots, Proceedings of the 4th British
Robot Association conference , Brighton, UK, 1981, pp. 207-213
39
Bibliography 40
[17]
W.-D. Hillis
: Active Touch sensing, MIT AI Memo 629 , April 1981
[18]
M.-H.-E. Larcombe
: Carbon Fibre Tactile Sensors, Proceedings of the First
International Conference on Robot Vision and Sensory Controls , Bedford, UK,
1981, pp. 273-276
[19]
P. Dario, G. Buttazzo
: An Anthropomorphic Robot Finger for Investigating Artificial Tactile Perception, International Journal of Robotics Research ,
Vol. 6, No. 3, 1987, pp. 25-48
[20]
P. Dario, D. De Rossi, C. Domenici, R. Francesconi
: Ferroelectric polymer tactile sensors with anthropomorphic features, Proceedings of the IEEE
International Conference on Robotics , Atlanta, GA, 1984, pp. 332-340
[21] P. Dario , et al.: Advanced Rehabilitative Robots, Proceedings of the International Symposium and Exposition on Robots , Sydney, Australia, 1988, pp.
687-703
[22] K. Tanie , et al.: A High-Resolution Tactile Sensor, Robot Sensors , Vol. 2,
1986, pp. 189-198
[23]
J. Rebman, K.-A. Morris
: A tactile Sensor with Electro-optical Transduction, Robot Sensors , Vol. 2, 1986, pp. 145-155
[24]
J.-S. Schoenwald
, et al.: A Novel Fiber Optic Tactile Array Sensor, Proceedings of the IEEE International Conference on Robotics and Automation ,
Raleigh, North Carolina, 1987, pp. 1792-1797
[25]
J. Winger, K.-M. Lee
: Experimental Investigation of a Tactile Sensor Based on Bending Losses in Fiber Optics, Proceedings of the IEEE International Conference on Robotics and Automation , Raleigh, North Carolina, 1988, pp. 754-
759
[26]
J.-L. Schneiter, T.-B. Sheridan
: An Optical Tactile Sensor for Manipulators, Robotics and Computer-integrated Manufacturing , Vol. 1, No. 1, 1984, pp. 65-71
[27] A. Cameron : Touch and Motion, Proceedings of the IEEE International Conference on Robotics and Automation , Philadelphia, 1988, pp. 1062-1067
[28] M.-H.-E. Larcombe : Carbon Fibre Tactile Sensors, Proceedings of the First
International Conference on Robot Vision and Sensory Controls , Bedford, UK,
1981, pp. 273-276
[29]
N.-J. Ferrier, R.-W. Brockett
: Reconstructing the shape of a deformable membrane from image data, The International Journal of Robotics Research ,
Vol. 19, No. 9, 2000, pp. 795-816
[30]
S. Hackwood
: A Torque-Sensitive Tactile Array for Robotics, The International Journal of Robotics Research , Vol. 2, No. 2, 1983, pp. 46-50
[31]
R.-C. Luo
, et al.: An Imaging Tactile Sensor with Magnetoresistive Transduction, Proceedings of the First International Conference on Intelligent Sensors and Computer Vision , Cambridge, Massachusetts, 1983
[32]
A.-R. Grahn, L. Astle
: Robotic Ultrasonic Force Sensor Arrays, Proceedings of the Robots 8 Conference , Detroit, Michigan, 1984, pp. 21.1-21.18
41 Bibliography
[33]
D. De Rossi, A. Nannini, C. Domenici
: Artificial Sensing Skin Mimicking
Mechanoelectrical Conversion Properties of Human Dermis, IEEE Transactions on Biomedical Engineering , Vol. 35, No. 2, 1988, pp. 83-92
[34] R.-C. Luo : Design and implementation of hand-based tactile sensors for industrial robots., Proceedings of the International Conference on Robotics and
Factories of the Future , 1984, pp. 423-432
[35]
Wikimedia
: Hall Effect , http://commons.wikimedia.org/wiki/File:Hall_ effect_A.png
[36]
Wikimedia
: Strain Gauge Pattern , http://upload.wikimedia.org/ wikipedia/commons/thumb/5/53/Strain_gauge.svg/424px-Strain_ gauge.svg.png
[37]
Tachi Lab
: http://tachilab.org/