Chapter 5.a - IIT Guwahati
advertisement

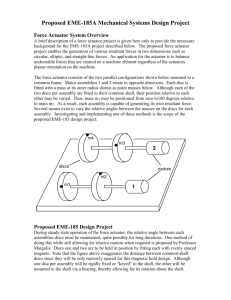
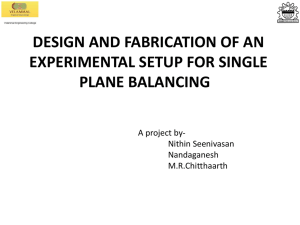
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) CHAPTER 5 GYROSCOPIC EFFECTS IN ROTORS 5.1 Synchronous motion Figure 1 shows the motion of a disc when the disc is at the mid-span and away from it. For the latter case the precession of the disc takes place along with the spinning, which leads to the gyroscopic couple on the disc. The critical speed of a rotor system with disc having point mass and with appreciable mass moment of inertia are not the same. This is due to the fact that centrifugal forces of the particles of the disc do not lie in one plane and thus from a couple tending to straighten the shaft as shown in Figure 5.2. We are considering the case of completely balanced rotor and whirling at its critical speed in slightly deflected position. The angular whirl velocity v of the centre of the shaft is assumed to be same as the angular velocity of rotation as of shaft ω (i.e. spin speed). This implies that a particular point of the disc which is outside in Figure 5.2(b) will always be outside; the inside point will always remains inside; it is called the synchronous motion. The shaft fibers in tension always remain in tension while whirling, and similarly the compression fibers always remain in compression. Thus any individual point of disc moves in a circle in a plane perpendicular to the undistorted centre line of the shaft. (a) When disc is at middle of the span, it will whirl in its own plane (b) When disc is at near the bearing, it will not whirl in its own plane Figure 5.1 Disc motion in rotor systems (a) (b) Figure 5.2 Critical speeds of case (a) and case (b) are not equal, even if the shafts are identical and the masses at the end are equal Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) B δ δ r1 S, G r φ ω r dm 2 ω2δ dm ω2r1 dm Figure 5.3 Frequency of whirl v is equal to frequency of spin ω (i.e. synchronous whirl) Centrifugal force of a mass element dm is ω2r1dm and is directed away from point B. Component in vertical direction is ω2δdm and is directed vertical down (added together will give a force and no moment.) and component in radial dir is ω2rdm and is directed away from the disc from shaft center or shaft centre S (components added together will give no force and only moment) (i.e. two force vectors one when dm is assumed to be rotated about S and second force when S itself is rotating about B). The force ω2δdm for various masses add together will give mω2δ (where m is the total mass of the rotor) acting downward at S (since S and G are same). ω2rdm ω2ydm yφ y ω2ydm θ r θ Shaft y S x φ y = rcosθ Figure 5.4 Centrifugal force on a particle of the disc The force ω2rdm all radiate from the center of the disc S. The y-component of ω2rdm is ω2ydm and the moment arm of this elemental force is yφ and x-component will balance themself. Thus the moment of the centrifugal force a small particle dm is (ω2ydm yφ) and total moment M of centrifugal forces is 222 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) M = ∫ ω y φ dm = ω φ ∫ y dm = ω φ I d 2 2 2 2 2 (5.1) where Id is the area moment of inertia of the disc about one of its diameter. Thus end of the shaft is subjected to a force mω2δ and to a moment Idω2 φ, under the influence of this it assumes a linear deflection δ and an angular deflection φ. This can happen only at a certain speed ω i.e. critical speeds. Thus the calculation of critical speed is reduced to a static problem, namely that of finding at which value of ω a shaft will deflect δ and φ under the influence of P = mω2δ and M = ω2Idφ. P EI M l Figure 5.4 A cantilevered beam with loadings at free end The linear angular displacement of the free end of the cantilevered beam as shown in Figure 5.4 will be ( ) ( ) mω 2δ l 3 I d ω 2φ l 2 Pl 3 Ml 2 δ= − = − 3EI 2 EI 3EI 2 EI ( ) ( ) mω 2δ l 2 I d ω 2φ l Pl 2 Ml φ= − = − 2 EI EI 3EI EI (5.2) (5.3) Equations (5.2) & (5.3) can be rearranged as 3 l2 2 l − 1 δ + − I d ω 2 mω φ = 0 3EI 2 EI (5.4) l 2 l − 1 δ + I d ω 2 + 1 φ = 0 − mω EI EI 2 2 This homogeneous set of equations can have a solution for δ and φ only when the determinant vanishes 3 l2 2 l − 1 − I d ω 2 mω 3EI 2 EI =0 2 2 l 2 l + 1 − mω Idω 2 EI EI 223 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) which gives ω 4 + ω 2 12 EI3 ml − I − mId l 2 d 3 Ml 3 EI k =ω Defining D= and 12 E 2 I 2 =0 mI d l 4 Id ml 2 (5.5) as the critical speed function. as the disc effect (5.6) Equation (5.5) can be written as 4 k4 + k2 D 12 − 12 − D =0 (5.7) With the solution k2 = 6 − 2 2 2 12 ± 6 − + D D D (5.8) For which only + sign will give a positive value for k2 or a real value for k. Plot of k2 versus D is given in Figure 5.5. 12 2ml 3 k = ω EI ω2 = 2 12ml3 EI 9 3 ω2 = 0 3ml 3 EI 1 D= 2 Id ml 2 3 4 → Figure 5.5 Variation of the critical speed function with the disc effect 224 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) Case I: For disc effect D = 0 (i.e. concentrated mass of the rotor) from equation (5.7), we have Dk 4 + 4k 2 − 12 Dk 2 = 0 For D = 0 above equation gives 4k 2 − 12 = 0 ⇒ k2 = 12 =3 4 Noting equation (5.6), we get EI 2 ω =3 ml 3 ⇒ ω2 = 3ml 3 EI (5.9) Equation (5.9) gives critical speed of a point-mass disc for the overhang case. Case II: For D→ ∞ (i.e. a disc for which all mass is concentrated at a large radius) no finite angle φ is possible, since it would require an infinite torque, which shaft cannot furnish. The disc remains parallel to itself and the shaft is much stiffer than without the disc effect (i.e. D =0). From equation (5.7) for D→ ∞ k 2 ( k 2 − 12 ) = 0 since k ≠ 0 hence k 2 = 12 ⇒ ω2 EI = 12 or ml 3 ω2 = 12ml 3 EI (5. 10) which is the critical speed for Id → ∞. Case III: When the end disc of an overhang rotor is having considerable amount of length, as shown in Figure 5.6, the couple of centrifugal forces for this case is such, it tries to push away from home angularly as shown in Figure 5.7. For the thin disc case the couple of centrifugal forces tries it to urge back home angularly. Rigid mass attached at end of cantilever beam. Figure 5.6 A cantilevered rotor with a long stick at free end 225 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) ω2ydm y (2) x φ (1) D x G b (x, y) Figure 5.7 Centrifugal force in a cantilevered rotor with a long stick at free end Here it is assumed that the centre of gravity G of the body is placed already in the axis of rotation x (i.e. δ=0). So there is no total centrifugal force (mω2δ) and only a moment. The force on a particle is ω2ydm and its moment arm about G is x, so that the moment is dM = ω2xydm (5.11) and for the whole body M = ω 2 ∫ xydm (5.12) For thin disc x = y φ (see equation (5.1) i.e. dM = ω2yφdm). 1 and 2 are principal axes. Let moment of inertia about those axes be I1 and I2.This set of axes is at angle φ with respect to the x-y axes. The product of inertia about x-y axes is ∫ xydm = I1 − I 2 sin 2φ ≈ ( I1 − I 2 )φ 2 (5.13) For thin disc I1 = 2Id and I2 = Id so that equations (5.13) and (5.12) gives M = ω2 Id φ, which is same as equation (5.1). For a disc of diameter D and thickness b, we have I1 = mD 2 8 and I2 = mD 2 16 + mb 2 12 (5.14) Substituting equations (13) and (14) into equation (12), we get mD 2 M = ω 2 ( I1 − I 2 ) φ = 16 − 226 mb 2 2 ω φ 12 (5.15) Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) For moment of the centrifugal forces is to be zero, from equation (5.15), we have mD 2 mb 2 = 12 16 or b = 0.87 D and it becomes negative for b > 0.87D (i.e. thin stick) and it is positive for b < 0.87 D ( i.e. thick stick or thin disc). Equation (5.15) can be written as: M = I d ω 2φ with MD 2 Id = 16 − Mb 2 12 (5.16) So Figure similar to previous case will still be applicable and dotted portion will acquire meaning for thin stick. 12 9 ω2ml 3/EI 6 3 Thin stick -2 -1 0 1 2 D= Id 3 4 ml 2 Figure 5.7 Variation of the critical speed function with the disc effect Table 5.1 Gyroscopic effects for different geometries of the disc/stick Relation between b and D Sign of Id Gyroscopic moment sign b = 0.87 D 0 0 b > 0.87D (Thin stick) Negative Negative b < 0.87 D (Thin disc) Positive Positive 227 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) For thin stick case it is assumed that the shaft extend to the centre of the cylinder without interference. If shaft is attached to the end of the cylinder, the elastic-influence coefficients are modified. The phenomenon described is generally referred to as a gyroscopic effect. 5.2 Asynchronous Motion (Rotational Motion only) Now consider small rotor is suspended practically at its centre of gravity by three very flexible torsional springs as shown in Figure 5.8. Torsional spring Motor Disc Angular momentum vector Ipω O. ω Motor Disc (a) Motor on torsional springs (b) A rotor system with motor suspension Time rate change of angular momentum Ipων B C νdt φ A (c) A conical whirl of the rotor Figure 5.8 A motor-rotor system supported on torsional springs The following system have been used: ω is the Spin speed of disc, ν is the angular velocity of whirl of the shaft centre line, Id is the Moment of inertia of stationary & rotating parts about an axis perpendicular to paper, Ip is the Moment of inertia of rotating parts about shaft axis, K is the torsional spring of shaft system. We want to calculate natural frequencies of modes of motion for which the 228 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) centre of gravity O remain at rest and the shaft whirls about O in a cone of angle 2φ. The disc on the motor shaft rotates very fast, and as the springs on which the motor is mounted are flexible, the whirling take place at a very slow rate than the shaft rotation. The angular momentum is given as Angular momentum = Ipω (5.17) In case whirl is in the same direction as rotation: The time rate of change of angular momentum will be directed from B to C (i.e. out of the paper). This is equal to the moment exerted by the motor frame on the disc. The reaction i.e. the moment acting on the motor is pointing into the paper and therefore tends to make φ smaller. This acts in an addition to the existing spring K, so that it is seen that the whirl in the direction of rotation makes the natural frequency higher. In the same manner it can be reasoned that for whirl opposite to the direction of rotation the frequency is made lower by gyroscopic effect. To calculate the magnitude of the gyroscopic effect, we have d ( I pω ) I pω = BC BC AB = = ν dtφ OB AB OB which can be written as d ( I pω ) =νφ I pω dt (5.18) which gives the gyroscopic moment. The elastic moment due to the springs K is equal to Kφ and the total moment is equal to (K ± νIpω) φ (5.19) where the positive sign for a whirl in the same sense as the rotation and negative sign for a whirl in the opposite sense as the rotation. In equation (5.19), the term in the parenthesis is the equivalent spring constant, the natural frequency will be (of the whirl i.e. ν = ωn) ωn2 = K ± ω n I pω (5.20) Id which can be written as ωn2 ∓ I pω Id ωn − K =0 Id 229 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) the solution can be given as 2 I ω K ± p + ωn = ± 2I d Id 2I d I pω (5.21) The ± sign before the square root, only positive sign need to be retained since the negative sign gives two values of ωn, which are both negative and equal and opposite to the two positive roots obtained with positive sign before the square root. Let ωn be non-rotating shaft natural frequency or without gyroscopic effect. 2.6 (ωn / ωn ) 0 0 ( I pω / 2 KI d ) 1.0 Figure 5.9 Natural frequency variation with the spin speed From Figure 5.9 it is seen that the natural frequency is split into two frequencies on account of gyroscopic effect (i) A slow one whereby the whirl is opposed to the rotation and (ii) A fast one where the whirl and rotation directions are the same. 5.3 Asynchronous Motion (General motion) In previous analysis of overhang rotor, it was whirling (the circular motion of the deflected shaft centre line about its undeflected position with a small amplitude) and rotating at the same angular speed and in the same direction. Cases have been observed where whirling and the rotation occur at different frequencies and sometimes in opposite directions. Aim is to calculate the natural whirling frequencies, ν, of a shaft with a single disc on it at any speed of rotation ω in most general manners as shown in Figure 5.10, where ω is the shaft spin speed about deflected centerline and ν is the shaft whirling frequency about undeformed position OA. 230 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) A O B θ, y ν C Ipω Figure 5.10 An overhang rotor Case I: ν = ν0 with ω = 0 Shaft is not rotating about its deflected center line but deflected center line OC is rotating with ν0 Case II: ν = 0 with ω = ω 0 Shaft will be in the deflected position and rotating with ω 0 about the deflected centerline OC. Case III: ν = ω The shaft fiber in tension will remain in tension and similarly shaft fiber in compression will remain in compression i.e. synchronous whirl. With this combined ν and ω motion, our aim is to obtain its angular momentum. If it does not whirl, but only rotates, the angular momentum is equal to Ipω (as shown in Figure 5.10) where Ip is disc’s polar moment of inertia about the (deflected) shaft centerline. For no rotation ω = 0, but only a whirl ν: The disc wobbles in space (about its diameter) and it is difficult to visualize its angular speed. The visualization can be made easier by remarking that at C shaft is always perpendicular to the disc always, so that we can study the motion of the shaft instead of the disc. The line CA is tangent to the shaft at C. The piece ds of the shafting at disc moves with line AC, describing a cone with A as an apex as shown in Figure 5.11. Speed of point C for a whirling count clockwise seen from the right, is perpendicular to the paper into the paper and its value is ωy. 231 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) ν O A B θ C/ at time dt C νdt (a) The pure whirling motion O A Idνθ C (b) The angular momentum Figure 5.11 Pure whirling motion of the rotor The line AC lies in the paper now, but at time dt later, point C is behind the paper by CC/ = (νy)dt (5.22) The angle between two positions of line AC then is y CC ′ ν ydt with θ = = AC AC AC (5.23) when θ is small, the angle of rotation of AC in time dt is equal to νθ dt. Hence the angular speed of AC (and of the disc) is equal to νθ. The disc rotates about a diameter in the plane of the paper and perpendicular to AC at C, so that the appropriate moment of inertia is Id (= ½ Ip for thin disc.). The angular momentum vector of the disc due to whirl is Idνθ and is shown in Figure 5.11(b). The total angular momentum is the vector sum of Ipω and Idνθ. 232 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) O A B Idνθ y θ OA Parallel to OA θ C Ipω Figure 5.12 Angular momentum due to whirling and spinning of the rotor Now we want to calculate the rate of change of this angular momentum vector, for that purpose we resolve the vector into components and ⊥ to OA (as shown in Figure 5.12) The component to OA rotates to OA around the OA in a circle with radius y and keeps its length during the process so that its rate of change is zero as shown in Figure 5.13. O A ν ( Ipω + Idνθ 2 ) Figure 5.13 Angular momentum components parallel to the shaft undeflected position The component ⊥ to OA is a vector along the direction BC (and it is the rotating radius of a circle with center B) as shown in Figure 5.14. ν B O A νdt C’ C Idθ (2ω-ν) Figure 5.14 Angular momentum components perpendicular to the shaft undeflected position From Figure 5.14 angular momentum components will be: 233 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) I pωθ − I dνθ cosθ = I dθ ( 2ω − ν ) (5.24) and in the direction from B to C. At time t = 0 this vector lies in the plane of the paper; at time dt this vector goes behind the paper at angle ωdt (see figure). The increment in the vector (directed ⊥ to paper and into it) is the length of the vector itself multiplied by ωdt, and is given as Idθ (2ω-ν)νdt (5.25) The rate change of angular momentum is Idθ (2ω-ν)ν (5.26) By the main theorem of mechanics this is the moment exerted on the disc by the shaft (i.e. by action). The reaction, the moment exerted by the disc on the shaft is the equal and opposite i.e. a vector directed out of the paper and perpendicular to it at C. Beside this couple there is a centrifugal force mω2y acting on the disc as shown in Figure 5.15. θ y M = - Idθ (2ω-ν)ν F = mν 2 y Figure 5.15 The inertia force and couple acting from the disc on the shaft caused by a shaft rotation, ω, and a shaft whirling, ν Influence coefficient of the shaft can be defined as: α11 is the deflection y at the disc from 1 N force; α12 is the angle θ at the disc from 1 N force or is the deflection y at the disc from1 N-m moment i.e. α21= α12 (by Maxwell’s theorem) and α22 is the angle θ at disc from 1N m moment. For cantilever beam, we have α11 = l3 l2 l , α12 = α 21 = and α 22 = 3EI 2 EI EI 234 (5.27) Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) The linear and angular deflections can be expressed as y = Fα11 + M α12 and θ = Fα12 + M α 22 On substituting the force, F, and moment, M from Figure 5.15, we get y = α11mν 2 y + α12 − I dθν ( 2ω −ν ) (5.28) and θ = α12 mν y + α 22 − I dθν ( 2ω −ν ) 2 which can be rearranged as [1 − α11mν 2 ] y + [ I d α12ν (2ω −ν )]θ = 0 and [−α12 mν 2 ] y + [1 + α 22 I dν (2ω − ν )]θ = 0 (5.29) Equation (5.29) is a homogeneous equation in y and θ, on putting determinant equal to zero, we get ν 4 [−mα11α 22 I d + mα 122 I d ] +ν 3 [2m α11α 22 I d ω − 2mα 122 I d ω ] +ν 2 [α 22 I d + mα11 ] + ν [−α 22 I d 2ω ] = 0 (5.30) Equation (5.30) contain seven system parameters: ω, ν, m, Id, α11, α12, and α22, which makes a good understanding of the solution very difficult. It is worthwhile to diminish the number of parameters as much as possible by dimensional analysis. Introducing four new variables: F = ν α11m the dimensionless frequency ; α 122 E= the elastic coupling α11α 22 and D= I d α 22 mα11 the disc effect S = ω mα11 the dimensionless speed. (5.31) With this new four variables equation (5.30) becomes F 4 − 25F 3 + D +1 25 1 F2 − F− =0 D ( E − 1) E −1 D ( E − 1) 235 (5.32) Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) Equation (5.32) is the fourth order polynomial in F, so for a given E, carrying a given disc d, and rotating at certain speed S, there will be four natural frequencies of whirl. Case I: For a point mass of the disc. i.e. Id = 0 or D = 0. Multiply equation (5.32) by D and substitute D = 0, we get D +1 2 1 F − =0 E −1 E−I since α11 = 1/ k ω = ±1 or F 2 =1 or F = ±1 or ν = ±1 α11m (5.33) in the usual natural notation, we have m k =± k m the result is very familiar. Case II: E = 0 (i.e. no elastic coupling) or a force causes a deflection only without rotation θ, while a couple causes on rotation θ only without deflection y. This is the case of shaft with simple supports with a disc in the mid-span point as shown in Figure 5.16. (a) (b) Figure 5.16 A Jeffcott rotor (a) pure translation (b) pure rotational motions Equation (5.32) reduces to F 4 − 25F 3 − D +1 2 1 F + 25 F + = 0 D D (5.34) Equation (5.34) can be written as ( F + 1)( F − 1) F 2 − 25F − 1 =0 D Equation (5.35) gives 236 (5.35) Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) F = −1 ; F = +1 and F= 1 D 25 ± (25) 2 − 4 2 = S ± S2 + 1 D (5.36) Frequency F is plotted against the speed S for the numerical value D =1 as shown in Figure 5.17. 3 F 2 -1 S -1 -2 -3 Figure 5.17 Whirl frequency versus spin speed variation For S = 0 from the first and second solutions, we are getting F=±1 (parallel up and down motion frequency, without any tilting) For S = 0 from the third solution F= ± 1 since D = 1 hence F = ± 1 D (processional motion; wobbling frequency without up & down motions) The D is so chosen or dimensioned that the parallel up and down frequency is the same as the wobbling frequency without up and down motion at no rotation i.e. S = 0 (see in Figure 5.17 spots “•”). Plot shows that the there are four natural frequencies reduce to two F = ±1, which really is one 237 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) frequency only because F = +1 corresponding to counter clockwise whirl and F = -1 corresponding to clockwise whirl. Case III: Plot of the frequency equation (5.32) for the general case. Taking a case of a disc on a cantilever shaft, for which l 2 2 α2 2 EI E = 12 = 3 l α11α 22 l 3EI EI = 3 and taking again D = 1. 4 For E = ¾ and D = 1, equation (32) becomes F 4 − 2SF 3 − 8 F 2 + 8SF + 4 = 0 (5.37) Equation (5.37) is the fourth degree polynomial with four roots F = f (S). It can be solved in two ways (i) Take a value of S and solve fourth degree equation in F or (ii) Take a value of F and solve a linear equation in S i.e. S= F 4 − 8F 2 + 4 2 F 3 − 8F (5.38) For F = 1 we get S = 0.5 etc. and it will result in Figure 5.18. Plot can be obtain for other value of D & E (i.e. other discs and other shafts). It is seen that for S = 0 there are only two natural frequencies F = ± 0.74 and F = ± 2.73 corresponding to 2-Dofs y & θ of a non-rotating disc. When the disc rotates all four natural frequencies are different. The curves are symmetrical about the vertical F-axis, which means that for +S and –S the same F-values occur, in other word four natural frequencies remain same for disc’s clockwise rotation or counter clockwise rotation. For ν = ω line: It intersects the curve at A. At the point A there is a “forward whirl” at the same speed as the rotation. Previously a plot of these intersection points A for various values of the disc effect D is plotted (with the assumption of synchronous motion). This kind of disturbance is obviously excited by unbalance, for synchronous whirl. It is a resonance phenomenon and the vibration amplitude at this critical is proportional to the amount of unbalance. 238 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) ν =3ω 5 F 4 ν =ω 3 E 2 1 D A -5 -4 -3 -2 -1 1 2 3 4 5 S O -1 B -2 C -3 ν =-ω -4 -5 Figure 5.18 Whirl frequency versus spin speed variation In summary the single mass system with gyroscopic effects have been considered for the following cases: Case I: Figure 5.19 Overhang rotors with (a) point mass (b) rigid disc and (c) long stick For ν = ω i.e. synchronous whirl one critical speed has been obtained. Case II: Figure 5.20 A flexibly mounted motor carrying a rotor 239 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) It has two kinds of whirls: fast whirl (forward) in same sense as ω and slow whirl (backward) in opposite sense as ω. Case III: ν ω Figure 5.21 An overhang rotor Four whirl natural frequencies with two forward and two backward. One of the forward whirl is same as for the case I. In Figure 5.18 B and C represent the backward whirl at the same speed as the spin with opposite sense of rotation. Example 5.1 Obtain transverse forward and backward synchronous critical speeds of a rotor system as shown in Figure 5.22. Take the mass of the disc, m = 10 kg, the diametral mass moment of inertia, Id = 0.02 kg-m2, the polar mass moment of inertia, Ip = 0.04 kg-m2. The disc is placed at 0.25 m from the right support. The shaft is having diameter of 10 mm and total span length of 1 m. The shaft is assumed to be massless. Take shaft Young’s modulus E = 2.1 × 1011 N/m2. Consider the gyroscopic effects and take two plane motions. Use the influence coefficient method. Influence coefficients are defined as: l=a+b y α11 α12 F = θ α 21 α 22 M with a b Figure 5.22 A rotor system α11 = a 2b 2 / 3EIl ; α12 = − ( 3a 2l − 2a3 − al 2 ) / 3EIl α 21 = ab(b − a ) / 3EIl ; α 22 = − ( 3al − 3a 2 − l 2 ) / 3EIl Solution: From equation (5.32), the frequency equation is given by F 4 − 2 SF 3 + D +1 2S 1 F2 − F− =0 D ( E − 1) E −1 D ( E − 1) we have D= I d α 22 0.02 × 1.4146 × 10−3 = = 0.0249 10 × 1.137 × 10−4 mα11 240 (A) Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) and E= α122 (3.031 × 10−4 ) 2 = = 0.5712 α11α 22 1.137 × 10−4 × 1.4146 × 10−3 On substituting values of D and E in equation (A), we get F 4 − 2 SF 3 − 95.99 F 2 + 4.664SF + 93.658 = 0 (B) For the forward whirl F = +S, hence from equation (B) F 4 − 2 F 4 − 95.99 F 2 + 4.664 F 2 + 93.66 = 0 ⇒ F 4 + 91.33F 2 − 93.66 = 0 which can be solved as F2 = −91.33 ± 91.332 + 4 × 93.66 −91.33 ± 93.36 = ⇒ F 2 = −92.35 and 1.015 2 2 Negative value is not a feasible solution, taking positive value only, we get F = 1.0075 = ωcrF α11m = ωcrF 1.137 × 10−4 × 10 ⇒ ωcrF = 29.88 rad/sec For the backward whirl, we have F = -S, hence from equation (B), we get F 4 + 2 F 4 − 95.99 F 2 − 4.664 F 2 + 93.66 = 0 ⇒ F 4 − 33.55 F 2 + 31.22 = 0 which can be solved as F2 = 33.55 ± 33.552 − 4 × 31.22 33.55 ± 31.63 = 2 2 F 2 = 0.96 and 32.59 ⇒ F = ω crB α 11 m = 0.98 and 5.71 Hence two possible backward whirls are possible 241 Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in) ωcrB = 0.98 × 29.66 = 28.47 rad/s (B1) and 169.34 rad/s (B2). Figure 5.23 shows the corresponding Campbell diagram (not to the scale). F B2=169.34 rad/s F1=29.88 rad/s B1=28.47 rad/s Figure 5.23 Campbell diagram S Exercise 5.1 Obtain the forward and backward synchronous bending critical speed of a rotor as shown in Figure 1. The rotor is assumed to be fixed supported at one end. Take mass of the disc m = 2 kg, polar mass moment of inertia Ip = 0.01 kg-m2 and diametral moment of inertia Id = 0.005 kg-m2. The shaft is assumed to be massless and its length and diameter are 0.2 m and 0.1 m, respectively. Take shaft Young’s modulus E = 2.1 × 1011 N/m2. Using the finite element method and considering the mass of the shaft with material density ρ = 7800 kg/m3 obtain first two forward and backward synchronous bending critical speeds by drawing the Campbell diagram. Figure 1 Shaft Bearings Disc Figure E5.1 242