Distributed Observation-Interpretation Networks for the Human
advertisement

Distributed Observation-Interpretation Networks for the
Human Genome Project and Beyond
Christopher J. Lee∗
April 26, 2002
Abstract
• A Coordination problem: How should the activities of many independent agents be coordinated [1]? How should work be distributed
among them? I will refer to this category as
the question of what agent model is preferred
for a given problem.
Multi-agent networks are an attractive solution for
many problems. A key challenge is finding ways
to break large, coupled problems into subtasks that
can be completed in parallel but which still ensure
a valid global solution. This creates a combined
problem of algorithmic decoupling and inferential
decoupling. I argue that a general key for solving
this problem is the concept of inferential integrity,
meaning that a parallel algorithm guarantees adherence to rigorous statistical inference rules globally, invariant to the grouping or ordering of how
observations are processed by independent agents.
I describe a series of properties of Hidden Markov
Model computations which enable large, coupled
computations to be split up while guaranteeing inferential integrity. We have used this approach extensively for analyses of the human genome and its
internal complexity.
1
• A Computational Complexity problem: a network is typically designed to solve some problem, and its design is in effect an algorithm
for solving that problem. This algorithm
must break the computational complexity of
the problem down to an order that the network can perform in an acceptable amount of
time for the range of problem sizes it will encounter [2]. Moreover, the algorithm must
be a parallel algorithm [3]. In other words,
it must break the problem down into quasiindependent computations by the individual
agents. This allows the network to be scalable
for larger problems simply by adding more
agents. I will refer to this as the algorithmic
decoupling problem.
Introduction
• An Inference problem: the network must be
able to make accurate inferences about entities and events in its environment [4]. Moreover, to achieve significant autonomy, individual agents in the network also need this ability to some extent. How can we attain this,
and also combine the inferences of independent agents in a way that ensures an optimal
overall inference by the network (even when
The construction of autonomous intelligent networks is a large problem requiring solutions to at
least three very different kinds of problems:
∗
Department of Chemistry and Biochemistry,
University of California, Los Angeles, California
90095,
leec@mbi.ucla.edu
Work
supported
by NSF grant IIS 0082964.
Project home page:
www.bioinformatics.ucla.edu/leelab/db
1
individual agents may disagree)? I will refer
to this as the inference decoupling problem.
t
In this paper, I will present a simple model of
“Distributed Interpretation-Observation Networks”
that we have used extensively for large-scale scientific computations such as analysis of the human genome [5, 6, 7]. This model attempts to address all three of these aspects in a single consistent
way, as I will illustrate with an example application
(D ECON) that uses this network model to analyze
the vast amount of raw experimental data for candidate human genes and their complex structures
in the human genome. The problem of finding and
understanding human genes has turned out to be
surprisingly difficult [8], and has driven the development of our agent model, because such a distributed model is required to solve it in a scalable
way.
2
1-t
Figure 1: Modeling genes as a graph of directed
edges, whose weights τ reflect the transition probabilities within the graph.
2.1 Algorithmic Decoupling
Let’s consider a simple problem of interpreting
event sequences. For example, the Human Genome
Project had to infer from many short sequencing observations the complete sequence and gene
structure of the human genome [5]. Assume
there exists a hidden state graph G consisting of
nodes representing states σ connected by directed,
weighted edges representing state transitions τ .
Assume that each state σ emits observable events
e with some probability p(e|σ), drawn from an “alphabet” α of possible events e ∈ α. Both the states
σ, the emission probabilities p(e|σ) and transition probabilities τ1→2 ≡ p(σ2 |σ1 ) are hidden (unknown, and not directly observable). These transition probabilities are normalized. In other words,
for all the edges that go from a given node i to any
other node j,
X
τi→j = 1
Autonomy Challenges
Building networks of agents with increasing autonomy can be considered to be a gradual transition from supervised learning algorithms to unsupervised learning algorithms. In the first case, a
training set of fully and correctly classified data is
analyzed by a supervised learning algorithm (such
as a Hidden Markov Model [9]) to produce a set of
optimal parameters for a model that will best predict the correct classifications of new data [10]. In
the second case, no classification of the training set
is provided initially, and the algorithm must itself
discover the classification in the data (for example by clustering). In both cases the goal of training is to produce a set of optimized model parameters, that are then applied to classify real-world
data. However, in the unsupervised case there is
no convenient separation between the problems of
training the model (from a given classification) and
of prediction (from a given model). Instead both
are joined as a coupled computation, producing a
potentially catastrophic explosion in the computational complexity of the problem.
j
Rather than assuming that there is one state sequence σ1 σ2 ... which we must infer from the set of
observed events, the τ transition probabilities represent a “hidden mixture” of many possible hidden
state sequences. Different event sequences may
have been emitted by entirely different state sequences within the graph. The complexity of this
2
hidden mixture is controlled by the τ parameters.
If they are all binary (τ = 0 or 1), the graph consists of a single unbranched path (state sequence),
whereas fractional τ values represent nodes with
multiple allowed outgoing edges–i.e. branch points
where more than one path is possible (figure 1).
This property has been essential for our detection
of the diversity that exists in the human genome
(i.e. that it is different in different people, and expressed differently in different cells) [6, 7].
Under this model, any traversal through G forms
a Markov chain, and we can make inferences about
G based on a large number of observed event sequences o = {e1 e2 ...} using the Hidden Markov
Model approach [9]. This is a classic machine
learning problem, applicable to many scenarios
such as speech recognition (inferring the phonemes
or words a person has pronounced, on the basis of
the observed audio signal) [11]. Generally speaking, this involves calculating the posterior probability of the graph model G given a set a set of observations O via Bayes’ Law
p(O|G)p(G)
p(G|O) = P
∀g p(O|g)p(g)
allowing the calculations for different observations o to be performed separately. I will
refer to this as observation factoring.
Second, because the model obeys the Markov
chain property [12], the probability of a single
observation can be broken down into separate
contributions for disjoint paths π through G.
p(o|G) =
X
p(o|π)p(π|G)
(3)
π∈G
where the π are disjoint paths through G. For
the speech recognition example, for one audio observation o, p(o|“Wachovia Bank”) and
p(o|“watch over your bank”) can be calculated
separately. This implies that the calculation
could be distributed efficiently over a network
of many agents. I will refer to this as Markov
independence.
• Global observation coupling: unfortunately,
while these likelihood components p(o|π) can
be calculated separately, the total posterior
p(G|O) tightly couples the set of all observations. For example, the probability of a single observation o being emitted from a particular path π within the model, p(o|π) depends
on the transition probabilities τ that lie on the
path π. However, there is no way to estimate
these τ values on the basis of a single observation. The τ can be thought of as the “hidden mixture parameters” within the model,
that show what fraction of events will take one
path vs. another at a particular branch point in
the model. As such they are inherently a property of the entire observation set, and can only
be estimated from the total set of observations,
via the calculation of p(G|O). This coupling
is a real barrier to distributing the computation
in parallel: in principle we cannot compute
p(G|O) without having all the p(o|π), and we
cannot compute any p(o|π) without already
having p(G|O).
(1)
and finding the model G∗ that maximizes this.
If we wished to solve this problem with a network of agents performing unsupervised learning,
what algorithmic challenges would we have to
overcome? Let’s consider the ways in which different aspects of this problem are coupled:
• The model G and observations O are distributable: because the model obeys the
Markov chain property, and the observations
consist of many independent event sequences
o, in principle the calculation of the total probability of the observations over the set of possible models p(O|G) can be broken down into
many separate calculations. First, the independent observations O = {o1 o2 ...} simply
factor
Y
p(o|G)
(2)
p(O|G) =
• Global computational complexity is O(N 2 ) or
worse: Can we solve the coupled global op-
o∈O
3
timization problem that this presents? There
are standard algorithms (such as the HMM
forward-backward algorithm [9, 11]) for calculating the likelihood crossing each edge in
the graph model, and iterative optimization
methods such as the Expectation Maximization (EM) algorithm for converging an initial
“guess” graph model to an optimal solution
[13]. How long will this take? For a single
observation sequence consisting of n events,
versus a graph model consisting of N states
each with an average of ² incoming edges,
the computational complexity of the forwardbackward algorithm will be O(²nN ). If we
assume that the total number of events in all
observation sequences is some multiple βN
of the total number of model states N which
we are trying to infer (and β > 1 is required
to hope for fully determining these states with
strong posterior probabilities), then the total
computational complexity is O(β²N 2 ). Finally, if ² is not a constant, but increases with
the size of the graph such that ² = γN , then
the complexity increases to O(βγN 3 ).
the computations required to interpret the observations are distributed over many agents performing
largely independent calculations. In the latter case,
agents simply report their observations to a central
“interpreter” that performs a global, coupled computation on the set of all data. The choice of algorithm type determines the agent model. Local,
decoupled algorithms are easy to distribute over
autonomous agents, whereas global, coupled algorithms are hard.
In the Human Genome Project, observations
were generated by a network of multiple observers
(different sequencing centers) [5, 14]. This distributed observation model is typically joined to
one of two models for interpreting the data. In a
centralized interpretation model, all of the raw data
must be sent to a central location. This has the advantage of allowing a global analysis of the total
observations, but is totally dependent on communication, and reduces the role of agents to being passive sensors. At the opposite extreme, interpretation is performed locally by the agents making the
observations. Their interpretations may be communicated to others. This has the advantage of making
the agents “smart” (able to interpret and act on their
own observations immediately), but blocks a fully
global analysis, since information tends to be lost
during local interpretation.
Neither of these models is acceptable for difficult
unsupervised learning problems like analysis of the
human genome. These problems are too hard for
simplistic local algorithms. On the other hand, the
computational complexity of the global, coupled
calculation is far too large for a centralized cpu.
Instead, I will describe a distributed observationinterpretation network model, in which local interpretation is performed, but in a way that is consistent with rigorous global interpretation algorithms.
For large problems such as human genome assembly (inferring the complete genome sequence
from observations of short fragment sequences, as
was actually done in the Human Genome Project
[5]), N can be very large (3 × 109 for the human
genome). O(N 2 ) and O(N 3 ) algorithms are useless for such large problems. This is representative
of a general challenge. To deliver the power of networks of computational agents to such problems,
we must find an algorithmic decoupling for breaking down their computational complexity.
2.2
Interpretation Networks
A parallel can be drawn between the distinction
of local algorithms (computing on a single observation o, or a single path π through the model)
vs. global algorithms, and distributed vs. centralized interpretation paradigms. In the former case,
2.3 Inferential Decoupling
The key question is whether the global inference
problem can be broken down into separate, local
inference problems that can later be re-combined
4
EST Sequence
Lower Probability
Matches
High Probability
Matches
Calculated Evidence-confidence:
0
0
6.8
7.5
Pseudogenes?
in equation 1), and those which are not (hidden parameters).
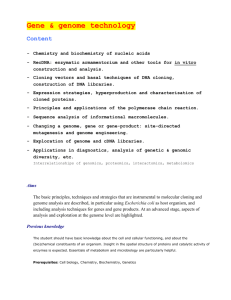
For example, to infer gene structure for the human genome, we must determine which edges τ
in the graph representing the genomic sequence
are actually followed by the cellular machinery
that produces an active gene product (“expressed
sequences” or “EST”s [14]). Human genes are
“spliced”; that is, they consist of large regions in
which each node is linked to the next node, with occasional “splices” where a large segment of nodes
is skipped over (figure 2) [15]. On the basis of the
observed expressed sequences (ESTs) we want to
infer which edges are real splices (i.e. have a nonzero τ value).
Inferential integrity can be achieved by any factoring of Equation 1 into separate calculation steps
that does not change its value. Fortunately, the nature of equation 1 permits many powerful ways of
subdividing its calculation:
Lower Probability
Matches
0
0
0
Strong Gene Evidence
0
Paralogous Gene?
Genomic Sequence
Figure 2: D ECON uses all possible matches of individual ESTs vs. the whole genome sequence to
measure evidence for genes, exons, introns, polyA
sites, etc., by calculating the probability drop due
to excluding each feature.
to produce the global solution. Let’s define this
property as inferential integrity. Such an algorithm
must be insensitive to different ways of grouping the observations, and different orders of recombining them; the total result should remain the
same. This would solve both of the problems raised
in the previous two sections. The true barrier to
algorithmic decoupling is that overly simplistic algorithms may simply get the wrong answer. By
contrast, to the extent we can find decouplings that
guarantee (or strongly approximate) inferential integrity, we can take full advantage of them to accelerate the computation. Moreover, inferential integrity provides a bridge between purely local vs.
purely global interpretation network models. A
computation with this property provides a flexible
mix of both strategies.
3
• Observation factoring: As shown in equation
2, we can separate the calculation into factors for independent observations, which can
be recombined to obtain the global solution by
simply multiplying them.
• Markov independence: As shown in equation
3, we can go further and break the calculation
for a single observation into separate contributions from different (disjoint) paths π through
G.
• Diagonalization: knowledge of the general
structure of the graph can provide additional
ways to divide the calculation. For example,
for the gene structure problem we know that
splices are rare, so the comparison between
observed EST and genomic sequence should
show long regions of match (diagonals in Figure 2) separated by occasional splices. This
allows us focus the calculation on just those
parts π of the model which could emit a given
EST with non-negligible probability, by run-
Inferential Integrity
What are the essential principles for obtaining this
property? First, my model for the rigorous global
solution is simply Bayesian statistical inference,
maximizing the posterior probability of the model
as given by equation 1. This approach is very general, and has as its key principle the distinction between things which are directly observable (e.g. O
5
4 Conclusions
ning a fast diagonal search algorithm such as
BLAST [16].
What general utility does this approach have for
the problem of constructing autonomous intelligent
networks? I suggest that the property of inferential
integrity is a key for designing an agent network
that can move flexibly across the spectrum of “independence” versus “cooperation”. Inferential integrity is valuable for decoupling a rigorous inference process both to reduce its computational complexity (the algorithmic decoupling problem emphasized in the Introduction), and also so that it
can be distributed efficiently over a large number
of compute agents (the agent model question mentioned in the Introduction).
For our work in the Human Genome Project
we have used this to build distributed observationinterpretation networks, in which each agent is
both an observer and also an interpreter. Such
networks have many advantages over pure localinterpretation or pure global-interpretation. It can
combine the advantages of each of these extremes,
while avoiding many of their respective disadvantages. It combines the scalability and robustness of
a distributed approach, with the rigorous statistical
inference of a fully centralized, global calculation.
It maximizes local resource utilization by breaking
down a large calculation into a very fine granularity
that can be distributed well, while keeping communication bandwidth requirements as low as possible (through mechanisms such as graph reduction).
Since the computational models we’re using are
very general (statistical inference, Hidden Markov
Models, graph reduction, etc.), it seems likely that
these basic ideas could be applicable to seeking inferential integrity for many other problems.
• Graph reduction: a further consequence of diagonalization is that we can separately calculate the p(o|π) over the possible paths for
a given observation o, and store it as much
reduced form of the original graph. Specifically, we eliminate all nodes and edges with
negligible probability, and collapse all linear
segments (i.e. without internal branching) to
a single node, saving the probability on each
segment.
• τ factoring: this graph reduction allows us to
do the single observation p(o|π) calculation
before we have τ , by using reasonable estimates for τ and simply factoring them back
out from the probability factors stored on the
reduced graph.
Using these separations, calculations for all the
individual observations can be performed on a distributed network with little or no communication.
Each agent simply performs the calculations for its
own observations. Finally, the reduced probability graphs for the observations are combined. This
also can be separated into many independent calculations, one for each individual τ . For each τ , only
a tiny subset of observations will be found to cross
that edge with high probability, and all of these will
have been identified efficiently by the diagonalization and graph reduction calculations. Only these
observations need be considered to determine this
τ . Moreover, only a small amount of information
(the reduced probability graphs for those observations) needs to be communicated between agents
to allow this calculation to be performed independently by a single agent. Thus all stages of the 5 Acknowledgements
computation can be distributed efficiently, and a
globally optimal solution produced with minimal This research was supported by NSF Grant IIS
communication demands.
0082964.
6
References
[10] T. Mitchell, Machine Learning. McGraw Hill,
1997.
[1] M. Barbaceanu, M.S. Fox, “COOL: a language
for describing coordination in multiagent sys- [11] L.R. Rabiner, “A tutorial on hidden Markov
models and selected applications in speech
tems,” Proceedings of the First International
recognition,” Proceedings of the IEEE 77,
Conference on Multi-Agent Systems. 17–24,
257–286, 1989.
1995.
[12] D.R. Cox, H.D. Miller, The Theory of
[2] J.T. Schwartz, M. Scharir, J. Hopcroft, PlanStochastic Processes. Chapman Hall, 1965.
ning, Geometry and Complexity of Robot Motion. Ablex Publishing Corp. 1987.
[13] A.P. Dempster, N.M. Laird, D.B. Rubin,
“Maximum likelihood from incomplete data
[3] T. Oates, M.V. Nagavendra Prasad, V.R.
via the EM algorithm,” J. Royal Stat. Soc. B
Lesser, Cooperative Information Gathering:
39, 1–38, 1977.
A Distributed Problem Solving Approach.
UMass Computer Science Technical Report [14] M.S. Boguski, G. Schuler, “ESTablishing
94-66. 1994.
a human transcript map,” Nature Genet. 10,
369–371, 1995.
[4] J. Binder, D. Koller, S. Russell, K. Kanazawa,
“Adaptive probabilistic networks with hidden [15] W. Gilbert, “Why genes in pieces?” Nature
271, 501, 1978.
variables,” Machine Learning 29, 213–244,
1997.
[16] S.F. Altschul, W. Gish, W. Miller, E.W.
Myers, D.J. Lipman, “Basic local alignment
[5] International Human Genome Sequencing
search tool,” J. Mol. Biol. 215, 403–410, 1990.
Consortium, “Initial sequencing and analysis
of the human genome,” Nature 409, 860–921,
2001.
[6] K. Irizarry, et al., C. Lee, “Genome-wide analysis of single-nucleotide polymorphisms in human expressed sequences,” Nature Genet. 26,
233–236, 2000.
[7] B. Modrek, et al., C. Lee, “Genome-wide detection of alternative splicing expressed sequences of human genes,” Nucleic Acids Res.
29, 2850–2859, 2001.
[8] S. Karlin, A. Bergeman, A.J. Gentles,
“Genomics: annotation of the Drosophila
genome,” Nature 411, 259–260, 2001.
[9] L.R. Rabiner, B.H. Juang, “An introduction to
hidden Markov models,” IEEE ASSP Magazine 3, 4–16, 1986.
7