THE FIRST EXPERIMENTAL VALIDATION OF THE TIME
advertisement

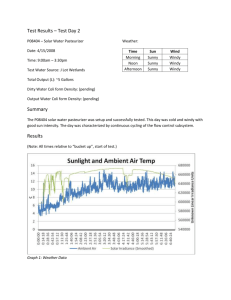
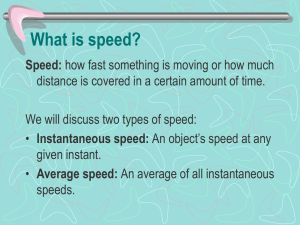
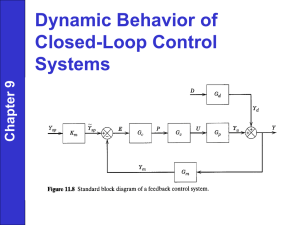
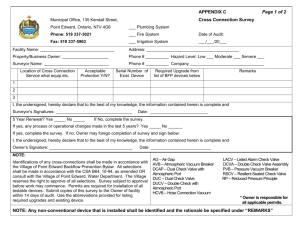
THE FIRST EXPERIMENTAL VALIDATION OF THE TIME-INTEGRAL OF DISPLACEMENT, WITH AN OBSERVABLE EFFECT –authors double-blind– University of Toronto ing further along the sequence of time-derivatives of displacement. 2. “KINEMATICS IN REVERSE”: TIME-INTEGRALS OF DISPLACEMENT The time-integral of displacement, termed “Absement”, was first defined in [9], and has since been used as a new paradigm for modelling electric circuits [10]. Absement was originally invoked to describe the response characteristics of fluid flow in musical instruments, including the newly-invented hydraulophone, which generates vibrations in matter in the liquid state. The reservoir-type hydraulophone is proposed [9] to be sensi0.3 n (t1) j a x=0 [m/sψ ] Jounce Jerk Acceleration Velocity Displacement Absement Absity Abseleration Abserk (t1) (t1) v (t ) x (t ) 1 x (t1) = 0.9m 0.4 0.2 0 0.1 −0.1 −0.3 −0.2 −0.5 −0.4 −0.6 −0.8 −0.7 −1 −0.9 ABSTRACT The time-integral of displacement (termed “Absement”) is a fundamental aspect of nature, which theoretically exists and can be mathematically calculated, but has never previously been physically and directly measured. Specifically, it has been clearly understood since Newton’s time that the integral of acceleration is velocity and the integral of velocity is displacement; yet the integral of displacement has remained an elusive concept. The purpose of this experiment was to detect Absement, for the first time, directly within a physical system. The methodology involved development of an experimental apparatus consisting of an input fluid reservoir with a microprocessor-controlled, linear valve whose motion resulted in the precisely controlled release of fluid at continuously varying, preprogrammed rates. A strong linear relationship was observed between the mathematically calculated integral of the valve’s displacement and the experimentally measured volume of fluid released, as functions of time, thus revealing Absement in a physical, measurable form. In conclusion, detection of the physical existence of Absement marks a major addition to Newton’s standard model of fundamental kinematics. 1 A (t1) B (t1) C (t1) D (t1) dt d dt ψ 1. BACKGROUND: KINEMATICS High Freq. +4 +3 +2 +1 0 -1 -2 -3 -4 Low Freq. Spectral Colouring Rel. to Displacemt: ψ S(f) = (2πi f) Sx(f) a (cm/s2) v (cm/s) x (cm) A (cm.s) a (m/s2) v (m/s) x (m) 1 A (m.s) v (m/s) x (m) A (m.s) displacement velocity absement a (m/s2) acceleration When Newton first published his second law of motion in f≠0 1687, he was not yet able to describe acceleration in terms MOTION EXAMPLE 1 MOTION EXAMPLE 2 EXPER. TRAPEZOIDAL MOTION 10 of a second derivative. At that time, in his Principia [1], 100 0.5 0 0 0 Newton drew a circle, with a tangent line touching against −0.5 t (above) −100 −10 0 10 20 the circle, to explain what he meant by acceleration [2]. After 0 1 2 3 4 5 0 10 20 30 40 50 1 1 2 Leibniz’ further contributions to calculus [3, 4], Jacob Her0 0 0 −2 −1 mann in 1716 [5] succeeded in describing acceleration via the −1 0 10 20 0 1 2 3 4 5 0 10 30 40 50 recently-invented incremental calculus: using derivatives [2]. 1 1 10 0.5 0 5 Displacement, and its time-derivatives—velocity, acceler0 0 −1 ation, jerk [6], jounce [7], etc.—form a sequence of progressively0 10 20 0 1 2 3 4 5 0 10 20 30 40 50 2 150 4 accumulating derivatives. These quantities have long proved 100 1 2 50 0 to be measurable: The first measurements of velocity were 0 0 0 10 20 0 1 2 3 4 5 0 10 20 30 40 50 accomplished using timekeeping devices along with sextants, time, t (s) time, t (s) time, t (s) maps or human footsteps to quantify displacement while acceleration has been first measured using pendulums and gravFig. 1: Motion: Theoretically-calculated examples of derivatives itometers. and integrals of displacement, and spectral transfer function based on the Fourier transform (for f 6= 0). The lower right column of Jerk [6] was first measured by Fox & Cawelti [8], and graphs shows the trapezoidal motion profile used experimentally. jounce was first measured by Ersoy et al. [7], thus progress- Time-evolution of valve and water collector Linear Valve Linear Actuator and Motor 10.00 4 8.00 2 6.00 0 4.00 -2 2.00 -4 0.00 -6 0 Graduated Fluid Collection Vessel tive to the absement of the player’s finger, unlike, for example, a piano, which is velocity-sensitive [11, 12]. Absement can be mathematically calculated using integration, analogously to the derivatives of displacement. However, unlike the derivatives of displacement—velocity, acceleration, jerk, jounce, etc.—the integral of displacement has never previously been experimentally measured in a physical system. This represents a fundamental gap in the scientific literature. In an attempt to bridge this gap, a novel apparatus was designed and built, as shown in Figure 2, to measure the time-integral of displacement through the use of fluid dynamics. This apparatus uses a linear valve to separate an input fluid reservoir from a collection vessel, as shown in Figure 2b. For verification, a computer controlled linear actuator was preprogrammed to move the linear valve at varying motion profiles across a 1.52 ± 0.03 mm gap at the bottom of the valve. The resulting release of fluid from the input reservoir into the 15 20 25 Time (s) 30 b k ± Δk 10.00 Water Depth in collector (cm) Fig. 2: A novel experimental apparatus designed to detect the timeintegral of displacement in a physical system. A linear actuator preprogrammed to execute a velocity profile moves a linear valve allowing for the release of water from the fluid input into the graduated fluid collection vessel, representing the time-integral of the displacement of the valve. (b) A close-up of valve allowing for the release of water from the input fluid reservoir to the graduated fluid collection vessel. To reduce edge effects, the valve was designed with a narrow εy gap relative to valve length. xMAX = 0.010 ± 2% Water Level in collector (cm) Linear Actuator and Motor 5.50 8.00 6.00 Conservative model constraint 5.00 5.0 4.50 4.5 4.00 4.0 4.00 2.00 0.00 0.0 -2.00 3.50 50.0 100.0 Repeatability deviation 150.0 200.0 Absement of Valve (cm·s) Water depth: upper bound Water depth: measured mean, Trapezoidal profile 3.00depth: measured mean, Triangular profile Water Linear 62.0 regression model Water depth: lower bound Displacement of valve: computed Velocity of valve: control target 12.00 Water Level in collector (cm) Valve Gate 10 Absement:Depth relationship for Trapezoidal motion profile 6.00 12.00 Valve Gap 5 Water depth: measured mean, Trapezoidal profile Water depth: measured mean, Triangular profile Velocity of valve: Trapezoidal control target Velocity of valve: Triangular control target Video Camera b a 6 Absement:Depth for Triangular profile 10.00 8.00 6.00 4.00 2.00 0.00 0.0 -2.00 Dampening agent: initial fluid (both plots) 50.0 100.0 150.0 Absement of Valve, via control system (cm·s) 16 14 12 10 08 06 04 02 00 -02 -04 -06 -08 200.0 -10 -12 c Velocity (cm/s x4); Displacement (cm) of valve Fluid Input Reservoir Water Level in collector (cm) 12.00 Velocity (cm/s) a Fig. 3: (a) The mean water depth measured in the collection vessel as a function of time for each motion profile. For clarity, measurement uncertainties are shown on (b) and (c) rather than (a). (b) The mean water depth measured in the collection vessel vs the mathematically calculated Absement of the valve for the trapezoidal motion profile. Error lines were added to account for the sources of error and linear regression analysis was run. A clear relationship (R2 =0.9998) can be seen between the experimental and theoretical data. (c) The mean water depth measured in the collection vessel vs. the mathematically calculated Absement of the valve for the triangular motion profile. Error lines were added to account for the sources of error and linear regression analysis was run. A clear relationship (R2 =0.9997) can be seen between the experimental and theoretical data. collection vessel was measured using a 24fps digital camera. The resting depth of the fluid released into the collection vessel, as a function of time, was determined and the data were correlated with the time-integral of the displacement of the valve (i.e. the valve’s absement). Hence, this apparatus was used to determine the correlation between the experimentally measured depth of the fluid displaced into the collection vessel and the mathematically calculated time-integral of the displacement of the valve. Edge effects in the valve apparatus were a key consideration in its construction. The ratio to of valve gap width εy maximum valve length was small xMAX = 0.010 ± 2% to minimize edge effects – i.e. to make flow profile uniform measured lengthwise along the length of the open valve. In analysis, a viscous boundary layer was modelled, representing lateral non-uniformity of vertical fluid flow, contributing to an error in effective length of the valve opening (effective displacement of the valve), or equivalently, an error in flow and accumulated water level. Using the Blasius formulation, the boundary layer thickness from measurements given a controlled head pressure was on the order of 0.4 mm, or approximately 0.3% of the maximum valve displacement. This uncertainty, along a statistical model of the valve gap drilling precision and variation, a valve seal leakage model, valve actuator precision, and head pressure variation, were combined to estimate uncertainty in the data processing. Hypothesizing that the apparatus indeed measures valve absement in the form of proportional water volume would require the following relationship to be satisfied: A(t) = V (t) · k ∗ , where A(t) represents the mathematically calculated integral of the displacement the valve as a function of time, V (t) represents the experimentally measured volume of water displaced as a function of time, for some unknown k ∗ . To measure absement in this form, the input fluid reservoir was filled with water. A constant head pressure was maintained in the input reservoir throughout the experiment using a depth-sensitive input flow valve. Prior to the start of each experiment, the output collection vessel was pre-filled with fluid to a known depth to serve as a dampening agent to reduce initial splatter and increase measurement accuracy. In the first set of experiments, the valve was programmed to execute a continuous trapezoidal velocity profile (shown in green in Figure 3a). In the second set of experiments, the valve was programmed to execute a triangular velocity profile (shown in yellow in Figure 3a). Each of the experiments was repeated five times to confirm replicability from experiment to experiment. To determine A(t), the velocity profiles depicted in Figure 3a were integrated twice to yield their respective theoretical Absement profiles. For example, see the lower right column of Figure 1 for the trapezoidal motion profile. Let us devise a proposed model with which we will test the relationship between experimental water depth in the collector, and predicted absement. We can first express displace- ment x(t) and absement A(t) of the valve as: Z t v(t) dt + x(t0 ) x(t) = (1) t0 Z t A(t) = x(t) dt + A(t0 ) (2) t0 from a starting time t0 , where v(t) is velocity of the valve, and x = 0 denotes valve closure. The volume of water flowing through the valve in a differential time period δt is δV = uz εy x(t)δt, where uz is the cross-sectional mean vertical speed of water through the valve (held constant within tolerance by the control system), and εy is the valve width. This flow accumulates in the collection vessel as total volume V (t), in addition to the initial dampening fluid. We define the baseline volume as zero at t0 such that V (t0 ) = 0 1 . Then, by the fundamental theorem of calculus: Z t x(t) dt = uz εy · A(t) (3) V (t) = uz · εy · t0 with A(t) as the absement of the valve, from its closed position (x = 0) and from time zero (t0 ) such that A(t0 ) = 0. The prismatic collector vessel’s water level Lc (t) rises in proportion to V (t). Given a collector cross-sectional area αc , A(t) = αc · Lc (t) uz εy (4) That is, the model predicts a direct linear relationship A(t) = k −1 · Lc (t), with k −1 = uαz εcy as the constant of proportionality. A theoretical model has hereby been determined, for absement observation, predicting a constant k, as a corollary of our earlier hypothesis. We now set out to confirm this hypothesis, i.e. to confirm a directly-measurable observation of absement. The standard errors of the depth of the water at a given time point across each trial were calculated, on average, to be ±2.2% for the trapezoidal velocity profile and ±1.5% for the triangular velocity profile. Based on the low standard error values, the data from each of the five trapezoidal and triangular experiments were averaged and consolidated into aggregate data sets with consolidated uncertainties. (Figure 3). Regression on the trapezoidal and triangular motion profile data, using the k linear model, gives k = 0.057 ± 0.003 s−1 (R2 = 0.9998 coefficient of determination) and k = 0.056 ± 0.003 s−1 (R2 = 0.9997), respectively. These k estimates are consistent, within conservative uncertainties found by forcing 100% compliance in each regression data point to be matched within bounds. The mean H(t) data and A(t) are plotted against each other (Figure 3b and 3c). 1 In the actual experiment, we measure V with reference to this baseline, with error tolerances above and below V (t0 ) = 0. Fig. 4: World’s largest hydraulophone.[need ref] This is the main centerpiece out in front of the Ontario Science Centre, an important architectural landmark. The South division responds to absement (the time-integral of displacement). The North division is a two-stage hydraulophone in which a hydraulophonic console actuates a secondary set of pipes. The North division therefore responds to absity (the second time-integral of displacement). [Photo illustration credit to: aaaaaa] Two-stage Hydraulophone d dt Abseleration Hydraulophone is Absement-sensitive d dt d dt Absity dt dt Integration d dt Displacement (Distance) Absement dt Piano is Velocity-sensitive Organ is Displacement-sensitive dt d dt Velocity (Speed) dt d dt GNU Free Documentation License, Piano from: Wikimedia Commons (User: Piano Industry Pro) Acceleration dt Differentiation Fig. 5: Absement explained in terms of musical instruments. The piano responds approximately to velocity: hitting a key faster makes a sound that is louder [11, 12]. The tracker-organ responds to displacement: pressing a key further down makes a sound that is louder [13]. The hydraulophone (standard reservoir type) is theorized to respond to absement [9]. Instead of a row of keys, the hydraulophone has a row of water jets, and is played by touching or blocking the water jets. Pressing more firmly on a water jet for a longer time period makes the sound build-up to become louder. The hydraulophone – – like our water reservoir apparatus of Fig. 2 – – is designed to respond to the time-integral of displacement. A two-stage hydraulophone responds to the double integral of displacement [9], which we name “absity”. Thus we have a theory and praxis of kinematics that extends in both directions, giving an ordered list of quantities that are each the time derivative (integral) of the next (previous) quantity: ....absounce, abserk, abseleration, absement, displacement, velocity, acceleration, jerk, jounce.... [6] International Standards Organization (ISO), Vibration and Shock Vocabulary 2041, International Standards Organization (ISO), 1990. Regression analysis applied to the data revealed that a lin[7] “Rubber bearing with a jounce sensor,” 2006, US Patent No. ear relationship between the measured volume and the math7,045,999 B2. ematically calculated Absement was statistically significant [8] “Force rate sensor assembly,” 1983, US Patent No. 4,420,123. with a minimum R2 value (coefficient of determination) of [9] S Mann, R Janzen, and M Post, “Hydraulophone design con0.9997 for the trapezoidal and triangular motion profiles. The siderations: Absement, displacement, and velocity-sensitive Absement-water depth relationship matched within error bounds music keyboard in which each key is a water jet,” in Proc. ACM International Conference on Multimedia, October 23-27, for both the trapezoidal and triangular motion profiles. In doSanta Barbara, USA., 2006, pp. 519–528. ing so, we have observed a physical system wherein Abse[10] Dimitri Jeltsema, “Memory elements: A paradigm shift in lament was directly correlated to a time-evolving property of grangian modeling of electrical circuits,” in Proc. 7th Vienna the system. That is, out of many kinematic quantities, the Conference on Mathematical Modelling, Nr. 448, Vienna, Aussystem depended on Absement. These experiments repretria, February 15-17, 2012. sent the first scientific demonstration of the time-integral of [11] Agnieszka Roginska, Justin Mathew, Jim Anderson, and displacement. The discovery of the derivatives of displaceAlex U. Case, “High resolution radiation pattern measurement, by Newton, Leibniz, Hermann et al., impacted countments of a grand piano: The effect of attack velocity,” The less fields relating to the motion of matter and the calculus of Journal of the Acoustical Society of America, vol. 133, no. 5, kinematics to finance, chemistry and beyond. Similarly, these pp. 3234–3234, 2013. experiments disclose a new alternate side of physics whereby [12] Caroline Palmer and Judith Brown, “Influence of hammer velocity in piano sound,” The Journal of the Acoustical Society changes in displacement over time are characterized by their of America, vol. 85, no. S1, pp. S142–S142, 1989. integrals rather than their derivatives, thus yielding new in[13] Alan Woolley, Murray Campbell, and Adam Apostoli, “An sights into the kinematic behavior of both discrete objects and investigation into the airflow through pipe organ pallet valve continuous matter such as fluids. openings using particle imaging velocimetry,” Proc. Forum Acusticum, Aalborg Denmark, 2011. 3. DISCUSSION 4. CONCLUSION This study revealed a clear linear relationship between Absement and a directly-measureable quantity in our apparatus, namely water level, such that Lc (t) = k · A(t). We determined that the experimental results fit the linear model because the value of k determined experimentally and theoretically matched within the error bounds. It therefore follows that the time-integral of displacement is directly correlated with a physical phenomenon (specifically, the volume of fluid released as a function of time) and is thus shown, for the first time, to represent a fundamental physical aspect of nature. 5. REFERENCES [1] Isaac Newton, Philosophiae Naturalis Principia Mathematica, Royal Society, London, 1687; Cambridge, 1713; London, 1726. [2] George Smith, “Newton’s philosophiae naturalis principia mathematica,” in The Stanford Encyclopedia of Philosophy, Edward Zalta, Ed. Stanford University, winter 2008 edition, 2008. [3] Gottfried Wilhelm Leibniz, De Geometria, Acta Eruditorum, Leipzig, June 1686. [4] Gottfried Wilhelm Leibniz, The early mathematical manuscripts of Leibniz; tr. from the Latin texts published by Carl Immanuel Gerhardt with critical and historical notes, by J. M. Child, Open Court Publishing Co., Chicago, 1920. [5] Jacob Hermann, Phoronomia, sive De viribus et motibus corporum solidorum et fluidorum libri duo, Amstelaedami, apud R. & G. Wetstenios, h. ff., 1716. Supplementary Information is linked to the online version of the paper at www.nature.com/nature. Acknowledgements We thank... Acknowledgements should be brief, and should not include thanks to anonymous referees and editors, inessential words, or effusive comments. A person can be thanked for assistance, not excellent assistance, or for comments, not insightful comments, for example. Acknowledgements can contain grant and contribution numbers. Author Contributions Experiments were carried out by M.B. and data were analyzed by R.J.; R.J. and S.M. created the conceptual design of the experimental apparatus, and final design and assembly was done by M.B., with testing by M.B., B.B., R.J. and S.M. ...Authors are required to include a statement to specify the contributions of each co-author. The statement can be up to several sentences long, describing the tasks of individual authors referred to by their initials. See the authorship policy page for further explanation and examples. Author Information Reprints and permissions information is available at www.nature.com/reprints. The authors declare competing financial interests: details accompany the full-text HTML version of the paper at www.nature.com/nature. Correspondence should be addressed to R.J. (rejanzen@gmail.com).