15. Three-dimensional resultant
advertisement

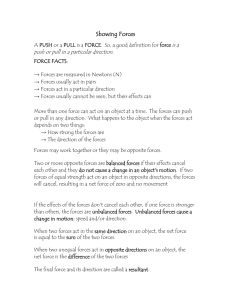
Three-dimensional resultant Hiroki Okubo 1 Resultants in three dimensions determined by the resultant couple. In statics, the body is in complete equilibrium when the resultant force is zero and the resultant couple is also zero. The resultant can be defined as the simplest force Thus, the determination of resultants is essential in combination which can replace a given system of both statics and dynamics. We examine the resultants for several special forces without altering the external effect on the force systems. rigid body on which the forces act. A force could be moved to a parallel position by adding a corre• Concurrent forces: Forces are concurrent at sponding couple. For the system of forces F 1 , F 2 , a point, and there are no moments about the F 3 · · · acting on a rigid body, we may move each of point of concurrency. them in turn to the arbitrary point O, provided we also introduce a couple for each force transferred. • Parallel forces: For a system of parallel We may move force F 1 to O, provided we introduce forces not all in the same plane, the magnithe couple M 1 = r 1 ×F 1 where r 1 is a vector from tude of the parallel resultant force is simply the O to any point on the line of action of F 1 . When magnitude of the algebraic sum of the given all forces are shifted to O in this manner, we have forces. The position of its line of action is oba system of concurrent forces at O and a system tained from the principle of moments. of couple vectors. The concurrent forces may be • Wrench resultant: When the resultant couadded to produce a resultant force R, and the couple vector is parallel to the resultant force, the ple may also be added to produce a resultant couple resultant is called a wrench. By definition a M . The general force system is reduced to wrench is positive if the couple and force vecX tors point in the same direction and negative if R = F1 + F2 + F3 + ··· = F (1) they point in opposite directions. A common X M = M1 + M2 + M3 + · · · = (r × F ) example of a positive wrench is found with the application of a screwdriver. (2) The couple vectors are shown through point O, but because they are free vectors, they may be represented in any parallel positions. The magnitude of are Pthe resultantsPand their components P R = F , R = F , R = F , R = x x y y z z pP P P P ( Fx )2 + ( PFy )2 + ( Fz )2 , M xP= (r × F )x , q My = (r × F )y , M z = (r × F )z , 2 Example Two forces act on the rectangular plate as shown. Reduce this force system to an equivalent forcecouple system acting at point O. Then determine the resultant of the system, expressed as a single force if possible, with its line of action. M = Mx2 + My2 + Mz2 . Solution. The resultant force R is R = (−F + In general, any system of forces may be replaced 2F )k = F k. The moment about point O is M O = by its resultant force R and the resultant couple bi×(−F )k+2bj×(2F )k = F b(4i+j). An approach M . In dynamics we usually select the mass center in determining the line of action of R is to use the as the reference point. The change in linear motion vector expression r × R = M O where r = xi + of the body is determined by the resultant force, yj + zk is a position vector running from point O and the change in the angular motion of the body is to any point on the line of action of R. Substituting 1 z F b O 2b y x 2F Figure 1: Example of resultant the vector M O and carrying out the cross product result in (xi+yj+zk)×F k = F b(4i+j). Thus, the desired line of action is given by yi−xj = b(4i+j), y = 4b and x = −b. References [1] J. L. Meriam and L. G. Kraige, (2011), Engineering Mechanics, Volume 1, Statics, 7th edition, Wiley 2