Robot manipulator for HERO - UC DRC Home
advertisement

Robot Manipulator for HERO
by
SERGEYZHEMCHUZHNY
Submitted to the
MECHANICAL ENGINEERING TECHNOLOGY DEPARTMENT
In Partial Fulfillment of the
Requirements for the
Degree of
Bachelor of Science
m
MECHANICAL ENGINEERING TECHNOLOGY
at the
OMI College of Applied Science
University of Cincinnati
May2008
© ...... Sergey Zhemchuzhny
The author hereby grants to the Mechanical Engineering Technology Department
permission to reproduce and distribute copies of this thesis document in whole or in part.
echanical Engineering Technology
~-=·=-()._,...:..ttl-=-~.:::.."
'-=::L.--=-·.....~<7------
Certified by _ _ _ _ _ _ _ _ _ _
Janak Dave, PhD,
Accepted by
Muthar Al-U idi, PhD, Department Head
Mechanical 1 ngineering Technology
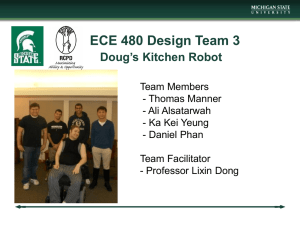
Robotic Manipulator for HERO
(Hazardous Environment Robotic Observer) – Robotic Arm
Sergey Zhemchuzhny
05/30/2007
ABSTRACT
The Hazardous Environment Remote Observer (HERO) goes into areas that are too
hazardous or inaccessible for humans and it relays back real–time video, sounds and sensor
readings. With the use of the robotic manipulator described in this report, first responders are
able to pick up an object weighing up to five pounds, gain access through the doorways, and
transfer dangerous objects into a safe place. The work load was divided in two: the arm
design was done by Sergey Zhemchuzhny, and the gripper design by Jeremy Nugent. The
payload, ergonomic design of the operator control unit, and lightweight design, were the
leading engineering characteristics that were used for design and manufacturing of the
manipulator. Using lighter and corrosion-resistant materials, the arm’s weight is eighteen
pounds total. The operator control unit and XBOX-360 handheld controller were designed
with a human factor in mind. They give the operator more control while spending less time
and effort for training. The software development was outsourced to Robotex, a software
development company headquartered in California. Manufacturing and assembly was
accomplished by First Response Robotics, LLC located in Amelia, OH. The 3-D Solid
Works parts were used to generate the tool path in CAD/CAM software environment with the
help of Surfcam. The regular TIG welding equipment was used for welding components of
the robotic arm. The expected due date for the completion of the project was May 22nd, 2008.
The actual completion date was May 15th, 2008, a week ahead of schedule. The testing was
done the last week prior to May 22nd, and was shown in a video format to the Mechanical
Engineering Department of University of Cincinnati as Proof of Design. The total budget for
the project was $6,477.00, and it was funded by Mike Cardarelli, CEO and President of First
Response Robotics, LLC. First Response Robotics is committed to design and manufacture
Unmanned Ground Vehicles for military, firefighting, and environmental applications. By
designing a robotic arm for HERO, First Response Robotics is looking to establish itself as a
strong and reliable supplier of the robotics on the market. To help First Response Robotics to
gain an edge and become even more competitive in the area of unmanned ground vehicles, a
couple of recommendations were made in the conclusion of the project such as the use of the
harmonic drive mechanisms vs. planetary mechanisms, and reduction of overall weight of the
joints.
ii
TABLE OF CONTENTS
ABSTRACT .........................................................................................................................................................II
TABLE OF CONTENTS .................................................................................................................................. III
LIST OF FIGURES ........................................................................................................................................... IV
LIST OF TABLES ............................................................................................................................................. IV
LIST OF FORMULAE ..................................................................................................................................... IV
INTRODUCTION ................................................................................................................................................2
HERO (HAZARDOUS ENVIRONMENT REMOTE OBSERVER) ..................................................................................2
VARIOUS UGV’S IN THE FIELD ...........................................................................................................................3
PRODUCT FEATURES AND CUSTOMER FEEDBACK .............................................................................4
QUALITY FUNCTION DEPLOYMENT ....................................................................................................................5
ENGINEERING CHARACTERISTICS .......................................................................................................................5
PRODUCT OBJECTIVES OF THE ROBOTIC MANIPULATOR FOR HAZARDOUS ENVIRONMENT REMOTE OBSERVER6
DESIGN.................................................................................................................................................................7
DESIGN ALTERNATIVES AND SELECTION ...........................................................................................................8
LOADING CONDITIONS ..................................................................................................................................... 10
DESIGN ANALYSIS ............................................................................................................................................ 10
FACTORS OF SAFETY OF CONCERN ................................................................................................................... 10
MANUFACTURING OF THE MANIPULATOR FOR HERO ...................................................................................... 11
Design for machining ................................................................................................................... 12
Design for welding ....................................................................................................................... 13
CONTROL SYSTEM SELECTION FOR HERO ....................................................................................................... 16
MATERIAL SELECTION FOR HERO’S ROBOTIC MANIPULATOR ......................................................................... 19
BILL OF MATERIAL ........................................................................................................................................... 22
TESTING AND PROOF OF DESIGN ...................................................................................................................... 22
Testing Results .............................................................................................................................. 22
SCHEDULE ........................................................................................................................................................ 24
BUDGET ............................................................................................................................................................ 25
CONCLUSION ................................................................................................................................................... 26
REFERENCES ................................................................................................................................................... 27
APPENDIX A - RESEARCH ..............................................................................................................................1
APPENDIX B - SURVEY ....................................................................................................................................1
APPENDIX C – QUALITY FUNCTION DEPLOYMENT .............................................................................1
APPENDIX D –SCHEDULE ...............................................................................................................................1
APPENDIX E – BOM/BUDGET ........................................................................................................................1
APPENDIX F – SUPPORT LETTER ................................................................................................................1
APPENDIX G – PRODUCT OBJECTIVE TABLE .........................................................................................1
APPENDIX H – CALCULATIONS ...................................................................................................................1
ANGULAR VELOCITY, ACCELERATION, AND DYNAMIC TORQUE CALCULATIONS...............................................1
STATIC TORQUE, GEAR REDUCTION, AND TORQUE CONSTANT CALCULATIONS ...................................................7
RADIAL FORCE CALCULATION AT J2 TO CHECK THE PRELOADED BEARING ON THE OUTPUT SHAFT OF THE
GEARBOX GP52C ............................................................................................................................................... 8
iii
GP52-C KEYWAY STRESS CALCULATIONS ........................................................................................................8
BENDING STRESS AND OUTSIDE DIAMETER SELECTION .....................................................................................9
DETERMINING FILLET WELD SIZE ON THE J2 LINK HOUSING .............................................................................9
FEA ANALYSIS OF THE ALUMINUM HOUSING FOR J2 LINK HOUSING ................................................................. 13
FEA ANALYSIS OF THE ALUMINUM HOUSING FOR J3 LINK HOUSING ................................................................. 14
FEA ANALYSIS OF THE ALUMINUM HOUSING FOR J4 LINK HOUSING ................................................................. 18
FEA ANALYSIS OF THE ALUMINUM HOUSING FOR J5 LINK HOUSING ................................................................. 20
COMBINED LOADING ON AN ALUMINUM TEE AT J2 PITCH JOINT ....................................................................... 23
BATTERY CALCULATIONS BY TORQUE CONSTANT METHOD............................................................................ 25
MAXIMUM ENCODER’S ANGULAR VELOCITY CALCULATION .......................................................................... 26
MATERIAL SELECTION FOR HERO ................................................................................................................... 27
APPENDIX-I DRAWINGS .................................................................................................................................1
SHOULDER JOINT-J2 ...........................................................................................................................................1
ELBOW JOINT-J3.................................................................................................................................................9
WRIST JOINT-J4 ................................................................................................................................................ 17
ROLL JOINT-J5 ................................................................................................................................................. 22
COMPLETE ARM ASSEMBLY ............................................................................................................................. 26
LIST OF FIGURES
Figure 1 - Hazardous Environment Observer Platform (1)..............................................................................2
Figure 2 - PACKBOT by iRobot (3) ...................................................................................................................3
Figure 3 - Warrior x 700 by iRobot (4) ...............................................................................................................3
Figure 4 - NEGOTIATOR 6X by Robotic FX (5) ..............................................................................................4
Figure 5-Robotic Arm with the turret option ....................................................................................................8
Figure 6-Robotic arm without turret option ......................................................................................................9
Figure 7-Motor Housing .................................................................................................................................... 11
Figure 8-Mounting ring for J2 joint.................................................................................................................. 12
Figure 9-Fixture for mounting rings ................................................................................................................. 13
Figure 10-Mounting ring attached to a special fixture .................................................................................... 13
Figure 11-R/C based control system ................................................................................................................. 16
Figure 12-Typical motor/potentiometer assembly in Position Mode ............................................................. 16
Figure 13-PID closed-loop Position mode ......................................................................................................... 17
Figure 14-AX500 Servo amplifier ..................................................................................................................... 17
Figure 15-Block diagram of the control system for HERO ............................................................................ 18
Figure 16-FRC control system overview by Pico-ITX..................................................................................... 19
Figure 17-Young's modulus E versus density for various materials (7) ........................................................ 20
Figure 18-Strength versus density for various materials (7)........................................................................... 21
Figure 19-Width of the arm ............................................................................................................................... 23
Figure 20-Height of the arm .............................................................................................................................. 23
Figure 21-Collapsed length of the arm ............................................................................................................. 24
LIST OF TABLES
Table 1-QFD Results Summary ..........................................................................................................................5
Table 2-Weighted decision matrix ......................................................................................................................9
Table 3-Aluminum welding parameters ........................................................................................................... 15
Table 4-Possible design combination for selected materials ........................................................................... 22
Table 5-Weighted property index chart for selection of a material for a robotic manipulator ................... 22
Table 6 - Main tasks to be completed by both team members........................................................................ 25
Table 7 - Budget estimates both mechanical and control components .......................................................... 25
LIST OF FORMULAE
Equation 1-Static torque calculation formula .................................................................................................. 10
Equation 2-The load-carrying capacity of a V-groove weld ........................................................................... 15
iv
Equation 3-The load-carrying capacity of a fillet weld ................................................................................... 15
Equation 4-The material performance index for minimum weight design ................................................... 20
v
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
INTRODUCTION
One of the areas of expertise for Unmanned Ground Vehicles (UGV) is the hazardous
materials and environment application, generally known as Hazardous Materials (HAZMAT)
application. A good example of the HAZMAT application is the Hazardous Environment
Remote Observer (HERO) (1). The current platform of the Hazardous Environment Remote
Observer allows its users to take air and water samples and be on site for possible chemical,
biological, and radioactive contamination or to do reconnaissance work. Another area of
application is the tactical one used by SWAT teams, which features two–way
communication, and quick deployment. However, the current design of Hazardous
Environment Remote Observers does not allow the robot to open doors with door knobs or
pick up/remove hazardous objects from emergency areas.
HERO (HAZARDOUS ENVIRONMENT REMOTE OBSERVER)
An existing platform for HERO (see Appendix A) is shown in Figure 1. The robotic vehicle
is capable of conducting reconnaissance, taking samples of the surrounding environment, and
supporting two–way communication. The robot reduces the risk for a variety of hazardous
first-response events including tactical and HAZMAT situations. Its award-winning compact
design, robust construction, and simple operating system minimizes response time when
every second counts (1).
Figure 1 - Hazardous Environment Observer Platform (1)
The following bulleted list shows two existing areas of robot application and its required features:
•
•
HAZMAT
o Easy decontamination
o Versatile platform that provides space to mount a variety of environmental
instrumentation
Tactical
2
Robotic Manipulator for HERO – Controls
o
o
o
Sergey Zhemchuzhny
SWAT tested
Two-way communication
Quick deployment (2)
VARIOUS UGV’S IN THE FIELD
Many companies have developed their own unmanned robotic vehicles capable of not
only taking samples or conducting reconnaissance, but also removing dangerous objects from
an emergency area and placing them into a safer environment (Appendix A). Figure 2 and 3
provide good examples of the current designs by iRobot. Both models feature two robotic
manipulators equipped with end-of-arm tooling (gripper), a vision system, and a firing
system.
Figure 2 - PACKBOT by iRobot (3)
Figure 3 - Warrior x 700 by iRobot (4)
The following features are available by iRobot on the market:
• Successfully execute firefighting, reconnaissance and other missions
• Get real-time intelligence and complete situational awareness
• Move firearms, hoses and other heavy payloads
• Get situational awareness in hostage situations
• Gain the tactical advantage on SWAT missions
• Protect first responders and the community from danger
Another good example of similar product is the Negotiator 6X robot below (see Figure
3
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
3). One of the distinctive characteristics of the Negotiator 6X is a very easy-to-use joystick.
Figure 4 - NEGOTIATOR 6X by Robotic FX (5)
The joystick allows the operator to replicate the natural movement of the human arm,
reducing the training time for robot operation.
It is imperative for First Response Robotics to design and manufacture a robotic
manipulator for HERO that will help not only remove objects and gain access through a door,
but also compete with its competitors.
PRODUCT FEATURES AND CUSTOMER FEEDBACK
Based on the interviews (Appendix A) with Mike Cardarelli, CEO and President of First
Response Robotics, and Keith Kowalski, CEO and President of Robotics Research
corporation, a customer survey was developed ( Appendix B). Twenty surveys were
distributed either in person or through the Internet, and eleven responses were received. The
following list of individuals, who responded to the survey questions, was generated along
with each person’s affiliation with the project:
1. Mike Cardarelli, CEO and President of First Response Robotics – ultimate customer
and sponsor of this project
2. Keith Kowalski, CEO and President of Robotics Research Corporation – technical
adviser
3. Seven manufacturing engineers from Pella Corporation – drive and electrical systems
design
4. Two design and product engineers from Procter and Gamble – electrical system
design
Based on customer survey, the following list of important features was compiled. Each
number corresponds to an average response from the customer against each item on the list.
One is being low importance and five is being high importance. Below are twelve desirable
features in order of importance:
4
Robotic Manipulator for HERO – Controls
•
•
•
•
•
•
•
•
•
Sergey Zhemchuzhny
Ability to lift 5 lbs – 5.0
Ability to unlatch doors – 5.0
Weight no more than 15 lbs – 5.0
Ability to replace gripper with another tool – 4.1
Power – off brakes or ability to hold torque in case of power loss – 4.0
Ergonomic design of the operator control unit (intuitive, rugged design) – 3.8
Intrinsically safe parts – 3.6
All materials weather resistant (corrosion resistant) – 3.5
A compact design in stowed position – 3.1
The first three items were not included on the survey. Mike Cardarelli, who is an ultimate
customer for the final product, requested that these items be given high importance.
Therefore, items one, two, and three automatically received the highest rating of five.
QUALITY FUNCTION DEPLOYMENT
The results from the survey helped to create the Quality Function Deployment (QFD). It
was used for measuring the customer requirements. By entering the results from the customer
survey, the relative weight of each feature was calculated. Table 1 shows the customer
features and links them with engineering characteristics. Each engineering characteristic has
its own absolute and relative importance value.
Table 1-QFD Results Summary
Feature
lightweight
ability to lift objects weighing up to 5 lbs
ability to unlatch doors
ability to replace the gripper with another tool
ability to hold torque in case of power loss
compact design in stowed position
ergonomic design of OCU
all materials weather resistant
Relative
Weight
0.16
0.15
0.15
0.13
0.11
0.10
0.10
0.09
Engineering Characteristic
weight
payload
dexterity
visual check
torque
articulating arm design
easy to control for human hand
corrosion resistance
Absolute
Importance
1.45
1.67
2.08
1.29
1.33
1.52
0.92
0.28
ENGINEERING CHARACTERISTICS
Considering all of the customer features listed above, relative weight, and average
response from the customers, the following engineering characteristics were generated.
Below are eight engineering characteristics in order of importance followed by the relative
importance percentages of relative weight of each customer feature multiplied by a hundred
percent:
5
Robotic Manipulator for HERO – Controls
1.
2.
3.
4.
5.
6.
7.
8.
Sergey Zhemchuzhny
Weight – 16%
Payload – 15%
Dexterity (Degrees of freedom DoF) – 15%
Visual check – 13%
Torque – 11%
Articulating arm design – 10%
Easy to control for human hand – 10%
Corrosion resistance – 9%
Dexterity and payload, on the engineering characteristics list, correspond to the needs of
The First Response Robotics, who is an ultimate customer for this design. The rest of the
engineering characteristics will be design into the final product to achieve those two needs.
PRODUCT OBJECTIVES OF THE ROBOTIC MANIPULATOR FOR HAZARDOUS
ENVIRONMENT REMOTE OBSERVER
Using customer features, engineering characteristics and their absolute importance, a
list of product objectives was created. Each engineering characteristic has its objective
assigned to it. These objectives helped to guide the design process in a right direction. The
complete table of Product Objectives can be found in AppendixG. The following is a
summarized list of the product objectives.
Product title:
Robotic manipulator for Hazardous Environment Robotic Observer (HERO)
Purpose:
Allow First Response Robotics’ Hazardous Environment Remote Observer to lift objects
weighing up to five pounds, to gain access through the doors, and to transfer dangerous
objects to a safer place
Special features:
Ability to easily replace gripper with another tool by designing the custom gripper with an
adapter plate; the gripper will have a five inch stroke, and be made out of lighter in weight
components (aluminum, carbon fiber, etc)
Need for product:
The ultimate customer (first response robotics) would like to see the arm to lift a five pound
object at full extension (four pounds are required by the government), to open door knobs,
and to be lightweight
Correlation with existing Unmanned Ground Vehicles in the field:
Some of the customer features named in the survey resemble similar characteristics in the
iRobot’s Pack Bot and the Negotiator 6X by RoboticsFX. The following features are listed
below with a measuring method bulleted.
6
Robotic Manipulator for HERO – Controls
•
•
•
Sergey Zhemchuzhny
all weather resistant
o material specifications or protective enclosures
o all fasteners are made out of stainless steel
an ergonomic design of the operator control unit
o commercial of–the–shelf product such as the Xbox360 hand control or similar
products
ability to hold torque in case of power loss
o use of brakes
Functional performance:
• ability to lift a five pound object
o five pound payload
• ability to unlatch doors
o visual check
• Weight of the arm will be lightweight
o densities of the materials used/ weight scale check
• a compact design in stowed position
o fit in a box of 15” x 10’’x 26’’ in
• ability to replace gripper with another tool
o custom design of the gripper
Physical requirements:
Round tubular profile for the robotic arms’ links; lighter or similar weight as compared to
other robotic manipulators made by the iRobot
Service environment:
Materials used to manufacture the arm to be corrosion resistant; all fasteners are made out of
stainless steel
Human factors:
An ergonomic design of the operator control unit – use of commercial joysticks such as PS-2,
3, X-box, Logitech hand controllers
DESIGN
The design process consisted of several steps. The first step was to generate four design
concepts, analyze them, and choose the best one. The second step was to perform necessary
calculations for both mechanical and control parts of the project. The third step was to choose
the pool of various materials that would satisfy the design requirements, and select the best
material out of the pool. The fourth step was to choose electrical components based on the
calculations and design requirements. The last step was to generate the design drawings and
7
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
manufacture the final product.
DESIGN ALTERNATIVES AND SELECTION
At the conceptual stage of the design
design, two solid models were created as possible design
alternatives. Below is Figures
igures 5 of one of the 3-D solid models of the possible design
concepts.
Figure
igure 5-Robotic Arm with the turret option
The first concept shown in Figure 5 differs from that of in Figure 6, shown next page, in the
amount of degrees of freedom. It hhas
as five degrees of freedom; whereas, the concept in Figure
6 hass only four degrees of freedom. Concept shown in Figure 5 has a turret that allows the
operator to pivot the arm about its horizontal axis of revolution. Even thought the concept
shown in Figuree 5 has more degrees of freedom, it weight 6 lbs more than that of shown in
Figure 6.
8
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
Figure 6-Robotic arm without turret option
In addition to the two concepts shown in Figures5 and 6,, two more design alternatives
were considered.. Different variations in type of motors and control systemss were added,
producing a total of four design alternatives
alternatives.. In order to choose the best concept, a weighted
decision matrix was used to choose the best alternatives. Table 2 is the final decision matrix.
Table 2-Weighted
Weighted decision matrix
Design Features
Ability to lift 5 lbs
Ability to unlatch doors
Weight no more than 15 lbs
Weight
Factor
Turret Concept with
Brushed DC motors
Score
Rating
Turret Concept with
Brushless DC motors
Score
Rating
No Turret Concept with
Brushed DC motors
Score
Rating
No Turret Concept with
Brushless DC motors
Score
Rating
0.10
9.00
0.90
7.00
0.70
9.00
0.90
7.00
0.70
0.10
9.00
0.90
9.00
0.90
8.00
0.80
8.00
0.80
0.11
3.00
0.33
4.00
0.44
9.00
0.99
9.00
0.99
All materials weather resistant
(corrosion resistant)
0.06
8.00
0.48
8.00
0.48
8.00
0.48
8.00
0.48
Ability to replace gripper with
another tool
0.09
8.00
0.72
8.00
0.72
8.00
0.72
8.00
0.72
Ability to hold torque in case of
power loss
0.08
9.00
0.72
8.00
0.64
9.00
0.72
8.00
0.64
Ergonomic design of the operator
control unit (OCU)
0.07
9.00
0.63
9.00
0.63
9.00
0.63
9.00
0.63
0.07
7.00
0.49
7.00
0.49
9.00
0.63
9.00
0.63
Compact design in stowed position
Total
0.68
5.17
5.00
5.87
5.59
The highest weighting factor of 5.87 in Table 2 received the No Turret
urret Concept with Brushed
DC motors. The ability of the DC brushed motor to handle higher torque values at lower rpm,
easier interface with the control system, and the lower overall weight of the arm without the
9
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
turret, the concept No Turret Concept with Brushed DC Motors scored the highest rating and
thus was selected as the primary design concept.
LOADING CONDITIONS
To successfully establish loading conditions of the robotic manipulator, certain data had
to be gathered: in particular, the time it takes for the arm to make a ninety degree sweep. In
order to accomplish it, the benchmarking on various robotic manipulators had to be
performed. The performance of the various robotic arms led to an estimated sweep time of
two and a half to four seconds. Thus, a 3.0 second time frame was chosen to raise the arm
from 0 to 90 degrees. Given the time it takes to raise the arm 90 degrees, the value of angular
velocity was computed at five revolutions per minute (see Appendix H1 for details).
In the earliest stages of the design process, the designer did not know whether static or
dynamic loading would be the worst-case scenario. Thus, both static and dynamic analyses
were performed (see Appendix H). For example, the torque value in a fully extended position
and 0 degrees is 481 in-lb verses 300 in-lb at the moment the arm starts rotating. Those
results suggested that static loading was higher than dynamic one. As a result of performed
calculations, static loading was established to be the primary concern for strength of material
calculations.
DESIGN ANALYSIS
To assist and speed up the design analysis, in addition to hand calculations, the Solid
Works Cosmos Express tool package was used for getting the design results. Since the worst
loading condition was known to be static, components under the highest forces acting on
them were selected. The following components were indentified to be under the highest static
loading: link housings for J2, J3, and J4 links. At full extension of the robotic arm, torque on
the link housing for the J2 joint is equal to 481 in-lb. For the rest of the torque values refer to
the static torque calculations of the Appendix H7. Physical dimensions and weights of the
manipulator were entered into an Excel spread sheet, and actual torque values were generated
for each of the joints, using equation 1.
Equation 1-Static torque calculation formula
Using the results obtained from the above equations, finite element analysis was performed
by Cosmos Express on the selected components (see Appendix H13 for details) with a safety
factor of 1.25, which means that 25% buffer was added to each component should forces
acting on the components exceed yield strength of the aluminum or stainless steel.
FACTORS OF SAFETY OF CONCERN
During the sizing of the motors and gearboxes for the robotic arm, certain areas of
concern had to be addressed. For the design to be safe, a safety factor (S.F.) of 1.2 was
chosen, i.e. 20% buffer to protect the equipment from the overload. At the pitch joint J2, the
maximum intermittent torque that is allowed on the gearhead shaft is 45 Nm (6). The actual
torque that the output shaft sees is 60 Nm with a S.F. included and 52 Nm without the S.F.
Thus, the actual torque on the output shaft, without the S.F., exceeds the maximum allowable
intermittent torque by 7 Nm. That value was compared with the maximum intermitten torque
listed by Maxon Motors, who is a vendor for motors and gearboxes. The torque on the output
shaft of the gearhead for pitch joint J3 is exceeding Maxon’s torque value of 22.5 Nm by 1.5
10
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
Nm. To address this issue, the manufacturer was contacted. From the personal conversation
with a sales engineer, the time range the motor can see such a large load without damaging
the gearhead was establish. According to Paul McGrath, a sales engineer at Maxon, a
gearhead can see 45 Nm torque from zero to five seconds. Also, the maximum allowable
intermittent torque values for all of their gearhead are based on very conservative design
values; thus, the actual intermittent torque values are more than likely higher than called out
on the specification sheets by Maxon motors.
Additional measures were taken to prevent damage should the torque values exceed the
allowable values. A R&W detent-slip clutch has been chosen to prevent the joint J2 from
overloading and damaging the motor and gearhead. Any time the torque value jumps above
the allowable intermittent torque value, the preloaded spring of the clutch will disengage,
making the clutch free spin a certain degree until a high load is removed.
MANUFACTURING OF THE MANIPULATOR FOR HERO
Due to good machinability and weldability of aluminum alloy 6061-T6, manufacturing
of the robotic manipulator was accomplished by machining and welding processes. After the
raw stock material was purchased, some preparatory machining was done to make the design
for welding easier. For example, to weld a 0.125’’x2.00’’x1.75’’ aluminum tubing to the
motor housing (Figure 7),
Figure 7-Motor Housing
the latter had to be predrilled in a CNC mill at the specified location. The profile of the link
housing was contoured in the CNC mill for easier attachment of the arm link. The motor and
link housings consist of extruded aluminum tubing readily available from any metal vendor.
11
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
Design for machining
Due to the complexity of the geometry and functional performance of the arm, all the
machining was performed in a CNC milling center or lathe with the help of CAD/CAM
software to speed up the process and assure the positional tolerances. All the motor and link
housings were designed with a minimal requirement for tool changes. The operator did not
have to change the tool more than twice during the machining of each housing. A boring bar
was used to open up the internal diameter on the J3, J4, J5 motor and link housings to reduce
the weight of the assembly. All of the internal and external radii were specified equal to the
radius of the rounded tool corner for the machining of the internal corners on the part. All of
the machined surfaces are RMS 125 and higher and can be achieved by any machining shop.
Since the raw stock has a round profile, it was easily clamped in a three-way chuck during
machining. Drilling operations were performed in a V-block. The main bores and auxiliary
holes are cylindrical and have length-to-diameter (L/D) ratios that make it possible to
machine them with standard drills or boring bars. Also, the auxiliary holes are parallel or
normal to the axis of both motor housings and link housings, and related by a logical drilling
pattern. The designer tried to avoid internal features in long parts as well as very large or
very small L/D ratios.
Attaching the motors and gearboxes to the motor housings was accomplished with the
special mounting ring shown in Figure 8.
Figure 8-Mounting ring for J2 joint
To assure the accuracy of the holes locations, a special fixture was used shown in Figure 9.
12
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
Figure 9-Fixture for mounting rings
This fixture helped the machinist to speed up the machining process and allowed for greater
accuracy of the relationship between the center bore and other holes locations. Also, it
allowed the machinist to firmly hold the ring in the fixture and prevent it from walking.
Figure 10-Mounting ring attached to a special fixture
Two flats can be seen on the fixture in Figure 10. These flats were machine on the outside
diameter of the fixture to let the machinist firmly clamp it in a vise and prevent it from
twisting.
Design for welding
During the design for welding of the robotic manipulator, four main factors were
considered in the design of a weldmnent:
1.The selection of the material
Since aluminum alloys posses high strength-to-weight ratio, low density, and can be
easily obtained in tubular form, a 6061-T6 alloy was chosen (see Material Selection
section for details). In addition, this alloy has good weldability. All of the above factors
were most important in choosing that alloy for welding.
13
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
2.The design of the joint
To weld aluminum tubing 1/8’’thick, a 45-degree chamfer had to be put on the outside
rim of the pre-drilled hole on both the link and motor housings. The latter are extruded
tubes of 1/8’’ thick as well; thus, both parts are of equal thickness. Then, the aluminum
tubing had to be inserted in the other tube, forming a Pipe Tee profile. The inserted tube
rested on the rim of the inside diameter of adjacent tubing and be constrained by the hole
pre-drilled in the adjacent tubing. For best results, the edges of the adjacent tubing around
the pre-drilled hole could be notched with a saw or chisel. Notching minimizes the
possibility of burning holes through the joint, permits full penetration, and prevents local
distortion (7). To weld heavy aluminum end caps to the end of the 1/8’’ thick tubing, the
edges of the cap and adjacent housing should be beveled to form a 90 degree to 100degree V. The opposite side of the joint could have a 1/16’’ root face. Before welding the
thick end cap, aluminum should be preheated to a temperature of 300 degrees of F (149
degrees of C) with a torch (7). The easiest way to tell if the temperature has reached the
desired value is to strike the metal with a hammer. No metallic ringing sound is heard if
the metal is struck (7). The surface film and any oil deposits must be removed before
attempting to weld parts. More heat input will require from the weld equipment due to
high thermal conductivity and high thermal expansion coefficient of aluminum, even
though the melting point of aluminum is lower than that of the steel. The distortion
during the solidification could be an issue; therefore, the welded parts may need to be
places in a three-way chuck or some sort of fixture to remedy both expansion and
contraction. The welding should be performed, whenever possible, in the flat or
horizontal position.
3.Selection of the welding process
Two welding processes were considered for the design of the weldment. TIG and
GMAW (MIG) both work well with aluminum alloys. Howerver TIG process is more
preferable compared to MIG. TIG is an economical and effective method of joining lightgauge, hard-to-weld metals such as aluminum (7). Plus, TIG is one of the easiest welding
processes to control by the operator and, when applied to thick joints, the bead formation
will be much faster. Thus, TIG welding was chosen. As far as the shielding gas, argon is
a preferred choice to reduce the metal spatter and increase arc stability. Table 3 gives the
main welding parameters that were chosen for the weldment design.
14
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
Table 3-Aluminum welding parameters
Metal
Edge
Electrode
Argon
DCEP
Voltage,(V)
Thickness,(in) Preparation Diameter,(in) Flow,(cfh) Current,(amps)
0.093-0.125
0.250
0.375
0.500
Fillet or
tight butt
Single-V
butt, Fillet
Single-V
butt, Fillet
Single-V
butt, Fillet
0.030-0.045
15-23
90-200
15
3/64
35
140-180
24
1/16
50
270
26-27
1/16
50
300
26-27
The following welding wires should be used for aluminum: ER-1100, ER-4043, ER-5183,
ER-5554, ER-5556, and ER-5654. For the base metal of 6061 alloy, and filler metal type of
the same alloy, ER-4043 would be the best choice (7) because of the similar physical and
mechanical properties of the filler metal.
4. Design of the welded joint so it will withstand the applied stresses
For the manipulator’s weldment design, a fillet and V-groove welds were used. Calculations
of the fillet weld size were performed for J2 housing and are listed in Appendix H. The loadcarrying ability of a full-penetration V-groove weld with ER-4043 electrodes (28-ksi yield
strength) would be
28
Equation 2-The load-carrying capacity of a V-groove weld
,where is joint strength, in kips per inch, and is the plate thickness (8). But most of the
weldment design was performed by using the fillet welds, which are most common for a
structural design. The fillet weld is weaker than butt or V-groove welds. The most probable
cause for a fillet weld is yielding in shear at the weld throat, given by 0.707 (8). The
analysis of the fillet welds was performed for ER-4043 ( 27, and was based on the
load-carrying capacity of a fillet weld using the following formula:
0.30270.707,
Equation 3-The load-carrying capacity of a fillet weld
, where 0.30 is the American Welding Society constant that allows a shearing yield strength
of 30 percent of the tensile strength designation of the electrode (8).
15
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
CONTROL SYSTEM SELECTION FOR HERO
Two control systems were considered for operating the HERO’s arm. The first system is
based on the standard radio-control (RC) system and shown in Figure11, readily available
from any radio hobby store.
Standard R/C
transmitter
control
Reciever
PWM signal
Servo amp. by
"Roboteq''
Amplified
PWM signal
DC Brushed Motor
by Maxon
RF signal
Battery
3 Wire Servo
Connection
Battery
Figure 11-R/C based control system
In the heart of the RC system lies a regular handheld controller such as Futaba or Hitec, RC
receiver of the same brand, and servo amplifier designed by Roboteq. The control of the
motors is accomplished by Pulse Width Modulation (PWM) between the receiver and servo
amplifier. The magnitude of the frequency of the PWM signal from the servo amplifier sends
the commanded signal to the motor turning it clockwise or counterclockwise. By changing
the duty cycle of the PWM signal, the motor accelerate or decelerate.
The second system shown in Figure 12 is based on the use of a commercial-off-the shelf
controller such as Xbox-360, PS2, or Logitech. Since the ultimate customer requested the use
of a commercial joystick due to its ease of use and its ergonomic design, the second choice
was selected as a primary direction for design of the control system. In addition, the speed
and position control were the main parameters to consider in the time the robotic arm will be
operated by the customer. Since it is much easier to interface the XBOX-360 to Intel-based
processor than to RC system, a closed-loop PID control system had to be chosen as the main
platform for design of the control system.
Figure 12-Typical motor/potentiometer assembly in Position Mode
To close the feedback loop, hollow shaft potentiometers by Novotechnik were used (see
Figure 12). These are the absolute position encoders with an analog output voltage of 0 to 5
V depending on their position. The sensor is composed of two parts: a body which will be
physically attached to a non-moving part of the motor assembly and an axle which must be
physically connected to the rotating part of the motor (9). Figure 13 shows the PID control
system using Roboteq’s servo amplifier.
16
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
Figure 13-PID closed-loop Position mode
To run a closed-loop system, an AX-500 double channel servo amplifier by Roboteq (see
Figure 14) was chosen.
Figure 14-AX500 Servo amplifier
It allows interfacing two motors simultaneously and saves space and weight. The servo
amplifier has a high current capacity, which allows for a high current draw from the motors
and prevents the board from overheating itself. The AX500 performs the Position mode using
a full featured Proportional, Integral and Differential (PID) algorithm. Every 16 milliseconds,
the controller measures the actual motor position and subtracts it from the desired position to
compute the position error. The resulting error value is then multiplied by a user selectable
Proportional Gain (9).
In addition to the position control of the robotic arm, the speed control of the motors was
applied by the controller. The angular velocities of the motors were set to known values (see
Appendix H) and were equal to the computed angular velocities based on supplied voltages
to the motors. This helped prevent the arm experiencing the sudden spikes in acceleration
and overloading of the motors.
Figure 15 shows the block diagram of the proposed design of the control system based
on the handheld joystick with a feedback response from analog potentiometers.
17
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
Pelican Case
Joystick
"XBox360"
Wireless
RS-232
Data Link
Radio
Transmitter
Atrigo Pico-ITX
Computer with USB
to Serial Converter
On-board system
Wireless
RS-232
Data Link
Radio
Receiver
Artigo Pico-ITX
Computer with USB to
Serial Converter
SSC-32 Serial Servo
Controller (3-wire
hobby type PWM
connectors)
Roboteq's Servo
Amplifier
Gripper RC servor
motor
DC Brush Motor +
Hollow Shaft
Potentiometer+
Brake
F
e
e
d
b
a
c
k
Figure 15-Block diagram of the control system for HERO
To synthesize the control system shown in Figure 15, it was necessary that the main
system had two separate computers: the operator computer and an on-board computer. Due to
the impossibility of interfacing the handheld joystick with regular RC equipment, a Pico-ITX
based microcontroller was chosen as the main control system shown in Figure 16. A Python
programming code was written in order to accomplish control of the robotic manipulator by
Robotex, CA. It consists of two microcontrollers, one of which is the operator interface and
another one is the main robot controller as well as supporting hardware and software. Figure
16 shows the main control system for HERO’s robotic manipulator.
18
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
Figure 16-FRC control system overview by Pico-ITX
Figure 16 depicts the cut-away view of the main controller. It works like a regular home-desk
computer, running the programming routing based on the operator input and comparing the
actual output from the potentiometer. The controller measures the actual motor position and
subtracts it from the desired position to compute the position error. The resulting error is
compared to the commanded input from the operator and the main processor output the
signal with a corrected position. The main difference between Pico-ITX controller and
regular desk-top computer is that it is much smaller; yet, it is as fast as regular computer. It
has a 1GHz processor that can perform on the same level as regular Intel or AMD processor,
which allows the operator to move the arm in real time without large delay.
MATERIAL SELECTION FOR HERO’S ROBOTIC MANIPULATOR
The selection of the correct material for a design is a key step in the process because it
19
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
links calculations and engineering drawings with a working design. In the case of a robotic
manipulator, the properties of particular materials were dictated the appropriate selection of
the material. The robotic arm will consist of the members that carry combined loads. One of
the important attributes that these members must possess is the ability to resist bending,
which is a stiffness property. At the same time the material of choice must be light.
The resistance to bending of different shapes can be found using the second moment of
inertia. A shape that has a high second moment of inertia for bending in all directions is the
cylindrical tube (7). To successfully use cylindrical tubing for the robotic arm design, it is
very important that the chosen material can be readily shaped into tubes. At the conceptual
design stage, the Ashby charts were helpful to narrow down a list of materials that could best
be used for cylindrical members. Figure 17 shows an example of the figure of the Ashby
chart that designer used to narrow down a group of materials for this project. In Appendix H,
the calculations for the material performance indices are listed. The goal of the performed
calculations is to minimize the mass of the frame and to maximize the performance index M
or C, in this case
Equation 4-The material performance index for minimum weight design
Figure 17 shows that all of the materials that lie on the line, with the slope , or above
and away from it are the best materials suitable for tubular section in bending and torsion.
Also, a Young’s modulus greater than 50 GPa is preferred for stiffness requirement,
restricting the search region on the graphs and eliminating wood as a possible material.
50 GPa
Figure 17-Young's modulus E versus density for various materials (7)
20
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
Figure 18-Strength versus density for various materials (7)
Based on Figures 17 and 18, the following materials were selected:
• Steel
• Aluminum
• Composites
• Titanium
All the above materials can be reviewed as a design choice. Even though wood has some
very good properties, it cannot be readily shaped into a tube (it can be drilled out, but this
weakens it and is expensive). So wood becomes redundant and can be omitted in this
application. In case of steel the choice was stopped at stainless steel grades due to corrosion
resistance requirement.
To make the decision easier, a weighted decision matrix was used. The five properties of
the future material were singled out for a design review. All properties are listed in Table 4.
Each property was ranked against each other to help in choosing the weighting factors.
21
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
Table 4-Possible design combination for selected materials
Property
1. Weight
2. Stiffness
3. Strength-toweight ratio
4. Ductility
5. Cost
Possible Design Combinations
5
6
7
1
2
3
4
1+2
1+3
1+4
1+5
1
0
0
1
1
1
2+3
2+4
2+5
0
1
0
1
8
9
10
3+4
3+5
4+5
1
0
0
3
1
0.3
0.1
3
0.3
1
2
10
0.1
0.2
1
0
0
0
Positive Weighting
Decision factor wi
1
1
0
Total
1
Table 5-Weighted property index chart for selection of a material for a robotic manipulator
Go-no-go screening
Weight
Stiffness
Strength-to-weight
ratio (Sy/ρ)
Ductility
Cost
Machinabil
Availability
Corrosion Weldability
ity
in tubing
0.3
0.1
0.3
0.1
0.2
Weighted
property
index, γ
Material
1
lb/in^3
β
ksi
β
in
β
%
β
$/lb
β
304 Stainless
Annealed
S
S
S
S
0.285
22.8
29,000.0
87.6
104,210.5
1.8
40.0
100.0
3.25
36.9
33.5
6063-T6,T451
S
S
S
U
0.098
66.3
10,000.0
30.2
317,948.7
5.4
12.0
30.0
1.20
100.0
47.5
Zoltek Panex 33
160k Carbon fiber
U
S
U
S
0.065
100.0
33,100.0
100.0
5,897,553.0
100.0
3.0
7.5
175.00
0.7
70.9
Ti-6Al-6V-2Sn
Titanium alloy
S
S
S
S
0.162
40.1
16,800.0
50.8
853,658.0
14.5
14.0
35.0
9.00
13.3
27.6
6061-T6,6061-T651
S
S
S
S
0.098
66.3
10,000.0
30.2
410,256.4
7.0
17.0
42.5
1.20
100.0
49.3
Table 5 shows that the clear winner is a composite material Zoltek, but if machinability and
weldability are taken into account, a composite material like Zoltek is not likely to be a clear
choice. Therefore, the second choice, an aluminum alloy 6061-T6, is the clear-cut winner.
This material scored high across the board, and it can be welded and machined. Also, it is
readily available in round tubing profiles.
BILL OF MATERIAL
A full BOM is listed in Appendix E. The main factor for creating a Bill of Material was
the need for keeping track of the amount of material that was used during the manufacturing
phase of the project. Most of the items on the list were either chosen based on calculations or
on the machining and welding capabilities of the First Response Robotics facility.
TESTING AND PROOF OF DESIGN
Testing Results
Eight separate tests were performed to confirm the final product met the customer
requirements listed in product objectives table in Appendix G. The following is the
description of each test item from the product objective table and the results:
1. Lightweight
a. The arm was scaled checked and weighed in at 17 lbs.
2. Ability to replace gripper with another tool
22
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
a. Adapter plate with regular screws allows the operator to replace the gripper
with ease.
3. Ability to hold torque in case of power loss
a. The team used power-off brakes furnished by Maxon Company.
4. Compact design in stowed position
a. Dimensions of the arm and its joints (see Pictures 19-21).
Figure 19-Width of the arm
Figure 20-Height of the arm
23
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
Figure 21-Collapsed length of the arm
5. Ergonomic design of the operator control unit
a. XBOX-360 handheld controller was used. This controller allowed the operator
to control both the robot and the arm.
6. All weather resistant
a. Aluminum 6061-T6, stainless steel components, and stainless steel fasteners
were used throughout the arm.
7. Pick up five-pound weight at full extension
a. A successful live test was performed with a five pound exercise weight on the
arm on May 18th, 2008 at First Response Robotics office.
b. The video was presented to the department during the oral presentation.
8. Open door knobs
a. A successful live test was performed on May 18th, 2008 at First Response
Robotics office on a regular office door with a round doorknob.
b. The video was presented to the department during the oral presentation.
SCHEDULE
Some of the main due dates for both mechanical and controls parts are listed in Table 6.
For a more detailed schedule of either mechanical or controls parts refer to Appendix D3.
24
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
Table 6 - Main tasks to be completed by both team members
Task to be completed
Date
Purchasing components
March1 thru May 1, 2008
Finishing production drawings
April1 thru May 7, 2008
Machining phase
April11 thru May 7, 2008
Welding phase
April11 thru May 7, 2008
Assembly
May 7-9, 2008
Fixing mistakes and tune-up of the control
May 9-13, 2008
system
Testing
May 18, 2008
Tech. Expo
May 22, 2008
The tasks “Machining and welding” were performed at the same time as First Response
Robotics provided full fabrication support. Also, all of the production drawings were created
before and at the same time that machining and welding were performed to sustain full
communication and assure accuracy in the fabrication phase. Robotex provided full support
for control system configuration, purchasing, installation. During the design process, the
gripper had to be redesigned. That pushed the rest of the deadlines one week behind, but the
team worked harder during the manufacturing phase. The team was able to catch up with the
main deadline finishing the manufacturing and assembly ahead of schedule.
BUDGET
The total budget for the project is $10,477.00 with $363.00 dollars allotted for the
gripper and $6,114.00 set aside for the feedback sensors (potentiometers) and mechanical
components (Table 7). Also, the overhead expenses of $4,000.00 (machining time,
electricity, miscellaneous) were included after completion of the project.
Table 7 - Budget estimates both mechanical and control components
Mechanical Components/ Controls
$ 6,114.00
Overhead Expenses - $4,000.00
Total Expenses - $10,477.00
Gripper
$ 363.00
To expedite the delivery of the ordered parts and their compatibilities, an effort was made
to buy components from one vendor. For instance, the DC motors required for this project
needed the gear reduction; thus, both the DC motor and the gear reduction mechanism had
been purchased from one vendor (Appendix E1). This will simplify interfacing issues during
an assembly phase of the design. The initial cost of the project was $2500.00 for the arm and
$1500.00 for the gripper. However, the team was able to design our own gripper, which
drove the cost of the gripper down. At the same time, the cost of the arm went up in price to
$6000.00 because the team had to buy high-end motors to accomplish the initial design
requirements.
25
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
CONCLUSION
During the design of the robotic manipulator, the main focus was to adhere to the design
requirements outlined in the Product Design Specification. This helped the team to focus on
the final design features and manufacture a better product capable of competing with the
similar robotic manipulators in the field. The high standards of this project and customer
requirements for the product were a driving force for a successful design. The goal of the
team was not to simply mimic the current product in the field, but to improve some of the
features or functions of the arm such as being able to replace the gripper with another tool
and making the arm lighter in weight. Even though the final project met ninety percent of the
customers design requirements, there are a couple of features that can be improved later. For
example, the design of each joint can be enhanced by eliminating the output shaft of the
gearbox, replacing it with an output flange and a through hole for wiring. This would help the
main customer reduce the weight and decrease the overall dimensions. Also, the planetary
gearhead could be replaced with the harmonic drive, which would increase the power
transmitted from the motor to the load and reduce the weight of the joint.
26
Robotic Manipulator for HERO – Controls
Sergey Zhemchuzhny
REFERENCES
1. Cardarelli, Mike. First response robotics web site. [Online] [Cited: Novermber 17, 2007.]
http://www.firstresponserobotics.com.
2. —. Hazardous Environment Remote Observer. [Document] Cincinnati : First Response Robotics,
2007. ISBN.
3. iRobot. iRobot. iRobot web site. [Online] iRobot, 2007. [Cited: September 29, 2007.]
http://www.irobot.com/sp.cfm?pageid=145.
4. —. iRobot Corporation. iRobot Corporation Web site. [Online] 2007. [Cited: September 29, 2007.]
http://www.irobot.com/sp.cfm?pageid=150.
5. RoboticFX. RoboticFX Corporation. RoboticFX Corporation Web site. [Online] 2007. [Cited:
September 30, 2007.] http://www.roboticfx.com/.
6. Maxon. Maxon motors USA. http://www.maxonmotorsusa.com/. [Online] maxon, 2008. [Cited:
Novermber 15, 2007.] http://www.maxonmotorusa.com/gear.asp.
7. Moniz B.J., Miller R.T. Welding skills. Homewood, Illinois : American technical publishers, Inc.,
2004. 0-8269-3010-7.
8. Jeorge, Dieter E. Engineering design. Singapore : McGraw-Hill Book Co, 2000. 0-07-116204-6.
9. Roboteq. Roboteq corporation. Roboteq web site. [Online] June 30, 2007. [Cited: March 22, 2008.]
http://www.roboteq.com/ax-technology.html#motormodes.
10. M.F., Ashby. Materials Selection in Mechanical Design. New York : ASM International,
Materials Park, OH, 1997, 1992.
11. Collins, Jack A. Mechanical Design of Machine Elements and Machines. New York : John
Wiley & Sons, Inc., 2003. ISBN 0-471-03307-3.
12. Division, Intelegent System. Response Robots. Gaithersburg : Technology Administration, US
Department of Commerce, 2007.
13. IFI robotics. IFIrobotics Corporation. IFI robotics web site. [Online] 2006. [Cited: February 21,
2008.] http://www.ifirobotics.com/rc.shtml#Specifications.
27
APPENDIX A - RESEARCH
1. The closest project to ours would be “Midwayer, A Reconnaissance Robot”. This is the robot
that has the problem that was stated in our senior design problem statement.
2.
www.firstrespon
serobotics.com
11/17/07
•
•
•
•
•
•
•
•
•
•
Robot platform
7 channel controller
Profiled and SuperGrip belts
2 sets NiMH battery packs (optional Lithium
Ion battery pack)
Battery charger
Power supply with wiring harness
Carrying case
2-way communcation headset, mic, and
accessories
Tool kit
Shipping case for robot and accessories
Good:
•
•
HAZMAT
o Easy decontamination
o Versatile platform
provides space to
mount a variety of
environmental
instrumentation
Tactical
o SWAT tested
o Two-way
communication
Bad:
No robotic manipulator
.
http://www.irobot.co
m/sp.cfm?pageid=15
0. 9/29/07
• Successfully execute EOD, firefighting, reconnaissance
and other missions...
• Get real-time intelligence and complete situational
awareness…
• Move firearms, hoses and other heavy payloads
Good:
Side mounted to robot.
Tubular design for manipulator.
All weather
Bad:
In order to move arm left and right
robot has to turn.
Too heavy.
Appendix A1
http://www.irobot.
com/sp.cfm?pagei
d=145 9/29/07
• Get situational awareness in hostage situations…
• Gain the tactical advantage on SWAT missions…
• Protect first responders and the community from
danger
http://www.robotic
fx.com/ 9/30/07
The simple Grip Control system’s design mimics the
shape and appearance of the Negotiator 6X, which
promotes intuitive operation. Each axis can be operated
independently or simultaneously for time sensitive
operations. Additionally, Negotiator 6X’s proportional
control allows the operator to perform tasks with
absolute delicacy and precision
Good:
Side mounted to robot
Tubular design for manipulator.
All weather
Light weight
Bad:
Camera mounted far away from
gripper.
Good:
• Very clever design of the
joystick.
• Very easy to use.
• Can control six degrees of
freedom: pan axis,
shoulder axis, elbow axis,
wrist tilt axis, gripper axis
• Two – way digital audio
communication
• Joystick can be positioned
on either side of the
operator control unit for
right and left handed
operation
Bad:
• Expensive
Appendix A2
3.
Interview Questions:
1.
2.
3.
4.
5.
6.
7.
8.
Please, state your name and job
title?
Are you affiliated or somehow
involved with operating, designing,
and manufacturing any robotic
devices? If yes, how long have you
done this sort of work?
Does your robotic device have some
sort of robotic manipulator or
robotic arm? If yes, what kind of
device it is?
For what purpose does the HERO
robot need a robotic manipulator?
How many degrees of freedom does
it have?
What do you view as the most
significant problems facing the use of
the robotic arms on UGV (unmanned
ground vehicle)?
What are the most important
features the robotic manipulator
should posses?
How would you improve the current
design of your robotic manipulator?
1. Mike Cardarelli, President
CEO of First Response
Robotics LLC.
2. Yes. Have built seven robots
since May, 2005
3. Articulating arms on each
wheel, each are
independent and rotate 360
0
. Camera mechanism that
can tilt and pan.
4. For Police Department: to
respond to hostage crisis
situations to establish two
way communications. For
EPA: to collect soil, chemical
samples as well as swab,
pick, and open objects.
5. One DoF (clockwise,
counterclockwise)
6. Weight, Dexterity, Size,
Robustness of the design,
and the amount of
accessories that can be
added to it.
7. Gripper with the ability to
open household door;
camera attached to the
gripper.
8. The robotic arm must be
light weight, compact,
reliable, and easy to use.
Interview Questions:
1.
Please, state your name and job
title?
2. Are you affiliated or somehow
involved with operating, designing,
and manufacturing any robotic
devices? If yes, how long have you
done this sort of work?
3. Does your robotic device have some
sort of robotic manipulator or
robotic arm? If yes, what kind of
1. Keith Kowalski, President
CEO of Robotics Research
Corporation.
2. Incorporated in 1983. Prior
to establishing his own
company worked for SDRC
lab. Worked on mechanical
systems in the field of
robotics for more than 25
Appendix A3
4.
5.
6.
7.
device it is?
How many degrees of freedom does
it have?
What do you view as the most
significant problems facing the use of
the robotic arms on UGV (unmanned
ground vehicle)?
What are the most important
features the robotic manipulator
should posses?
How would you improve the current
design of your robotic manipulator?
3.
4.
5.
6.
7.
years.
Main product and services is
a modular robot design,
family of modules to form
any particular manipulator
design.
Have built up to seventeen
degrees of freedom.
Lack of application
knowledge and people do
not know how to use it.
Depends on application.
Increase the dexterity of the
arm. Be creative and do not
stop improving. Use as many
electrical components as
possible and less hydraulics
Appendix A4
APPENDIX B - SURVEY
Robotic Manipulator for HERO (Hazardous Environment Robotic Observer)
Customer Survey
We are, Sergey Zhemchuzhny and Jeremy Nugent, seniors at the University of Cincinnati studying Mechanical Engineering Technology. Our goal is to design and
build the robotic manipulator for HERO (Hazardous Environment Robotic Observer). We would like you to take a few minutes and fill out this survey. By answering
the questions below, we will be able to use your answers to build a better manipulator.
What is important to you for the design of a robotic manipulator? Please circle the appropriate number corresponding to each question. 1 = low importance 5 = high
importance
2
The ability to replace gripper with
another tool (adaper plate)
1
0
2
0
3
1
4
10
5
2
n/a
0
4.1
1
Power - off brakes or ability to hold
torque in case of power loss
1
0
2
1
3
3
4
4
5
5
n/a
0
4.0
5
An ergonomic design of the operator
control unit (intuitive, rugged design)
1
0
2
0
3
5
4
6
5
2
n/a
0
3.8
3
All materials weather resistant
(corrosion resistant)
1
2
2
0
3
3
4
5
5
3
n/a
0
3.5
4
A compact design in stowed position
1
1
2
4
3
3
4
3
5
2
n/a
0
3.1
We would like to extend our gratitude to all responders for taking their time to participe in our survey
Appendix B1
Visual check
Customer Feedback
Sales Points
Modified Improvement Ratio
Relative Weight
Easy to control for human hand and eye
1
5.0
5.0
5.0
3.5
3.1
4
3.8
1.10
1.10
1.20
1.00
1.20
1.05
1.00
5.5
5.5
6.0
3.5
3.7
4.2
3.8
0.15
0.15
0.16
0.09
0.10
0.11
0.10
9
4.1
1.20
4.9
0.13
1.29
Torque
Articulating arm desing
Corrosion resistance
3
9
Weight
9
10.55
37.1
1.00
3
3
9
3
3
1
3
9
1.52
1.33
0.92
slug-ft^2 0.13
0.09
lbs/sec
0.14
0.03
lb/in^3
ft
0.14
DOF
0.28
0.20
Units
2
Relative Importance
0.16
1.45
1
0.12
9
sec
3
3
lb
Absolute Importance
Dexterity
Performance
1. Ability to lift objects weighing up to 5 lbs
2. Ability to unlatch doors
3. Lightweight design
4. All materials weather resistant
6. Compact design in stowed position
7. Ability to hold torque in case of power loss
8. Ergonomic design of the OCU
Features
9. Ability to replace gripper with another tool
2.08
►Hows
1.67
▼Whats
Payload
APPENDIX C – QUALITY FUNCTION DEPLOYMENT
Appendix C1
Alternative Design Sketches 6
Weighted Object Method 7
Best Possible Design 8
Proof of Design Agreement 11
Dynamic Calculations for Arm
Design Arm
Design Gripper
Calculations for Gripper
Calculate Motors Speeds
Construct Drawings
Order Arm Materials
Fabricate Arm links
Order Gripper Materials
Assembly of Manipulator
Testing
Demonstration of proof of design
Work on design report
Tech Expo
Oral Presentation
6/01 - 6/07
9 10
5/25 - 5/31
8
5/18 - 5/24
5/11 - 5/17
4/13 - 4/19
Spring Quarter
4 5 6 7
5/04 - 5/10
3
4/27 - 5/03
2
4/20 - 4/26
1
4/06 - 4/12
3/23 - 3/29
3/16 - 3/22
3/09 - 3/15
3/02 - 3/08
2/24 - 3/01
2/17 - 2/23
2/10 - 2/16
2/03 - 2/09
1/27 - 2/02
1/20 - 1/26
1/13 - 1/19
Dates
Tasks
1
1/06 - 1/12
Week
Robotic Manipulator for HERO Robot
(Mechanical)
Jeremy Nugent
Winter Quarter
2 3 4 5 6 7 8 9 10 11
3/30 - 4/05
APPENDIX D –SCHEDULE
15
1
22
28
28
11
5
14
3
4
25
2
14
30
22
9
26
Appendix D1
Different Design Alternatives 6
Weighted Object Method 7
Best Possible Design 8
Proof of Design Agreement 11
Gather Necessary Data (literature, formula)
Choose DC Motors & Motor Controllers
Choose RF Transmitter and RC Receiver
Choose 3-Axis Joystick
Purchase DC Motors & Motor Controllers
Purchase RF Transmitter and RC Receiver
Choose Elec. Hardware and Wiring
Purchase Elec. Hardware and Wiring
Design Layout of the Main Controller
Purchase 3-Axis Joystick
Fabrication of the Main Controller
Testing of the Main Controller
Demonstration of proof of design
Working on Design Report
Tech. Expo
Oral Presentation
6/01 - 6/07
9 10
5/25 - 5/31
8
5/18 - 5/24
4/13 - 4/19
5/11 - 5/17
4/06 - 4/12
Spring Quarter
4 5 6 7
5/04 - 5/10
3
4/27 - 5/03
2
4/20 - 4/26
1
3/30 - 4/05
3/23 - 3/29
3/16 - 3/22
3/09 - 3/15
3/02 - 3/08
2/24 - 3/01
2/17 - 2/23
2/10 - 2/16
2/03 - 2/09
1/27 - 2/02
1/20 - 1/26
1/13 - 1/19
Dates
Tasks
1
1/06 - 1/12
Week
Robotic Manipulator for HERO Robot
(Controls)
Sergey Zhemchuzhny
Winter Quarter
2 3 4 5 6 7 8 9 10 11
8
25
1
1
1
8
15
22
28
21
18
2
2
14
30
22
9
26
Appendix D2
Different Design Alternatives
Weighted Object Method
Best Possible Design
Proof of Design Agreement
Gather Necessary Data (literature, formula)
Choose DC Motors & Motor Controllers
Choose RF Transmitter and RC Receiver
Choose 3-Axis Joystick
Dynamic Calculations for Arm
Design Arm
Purchase DC Motors & Motor Controllers
Design Gripper
Purchase RF Transmitter and RC Receiver
Choose Elec. Hardware and Wiring
Order Arm Materials
Calculations for Gripper
Calculate Motors Speeds
Construct Drawings
Purchase Elec. Hardware and Wiring
Design Layout of the Main Controller
Fabricate Arm links
Purchase 3-Axis Joystick
Fabrication of the Main Controller
Order Gripper Materials & Tubing
Assembly of Manipulator
Testing of the Main Controller
Testing
Demonstration of proof of design
Working on Design Report
Tech. Expo
Oral Presentation
10
6/01 - 6/07
9
5/25 - 5/31
8
5/18 - 5/24
5/11 - 5/17
5/04 - 5/10
4/27 - 5/03
Spring Quarter
4
5
6
7
4/20 - 4/26
3
4/13 - 4/19
2
4/06 - 4/12
3/30 - 4/05
1
3/23 - 3/29
3/16 - 3/22
3/09 - 3/15
3/02 - 3/08
2/24 - 3/01
2/17 - 2/23
2/10 - 2/16
2/03 - 2/09
1/27 - 2/02
1/20 - 1/26
1/13 - 1/19
Dates
Tasks
1
1/06 - 1/12
Week
Robotic Manipulator for HERO Robot
Winter Quarter
2
3
4
5
6
7
8
9 10 11
6
7
8
11
8
25
1
1
15
1
1
22
8
15
5
28
28
11
22
28
14
21
18
3
4
2
25
2
14
30
22
9
26
Both
Sergey
Jeremy
Appendix D3
APPENDIX E – BOM/BUDGET
Part Description
Qty.
(amount or
feet)
Manufacturer
Delivery/Lead
time
Part #
Cost per
Unit or per
Feet, $
$ ,Total
Cost
Arm Design/Controller Components
(Sergey Zhemchuzhny)
Rotary Position Sensors
2
http://www.novotechnik.com/
popups/rotary1.html
04/07/08
GL200
$219.00
$438.00
Rotary Position Sensors
2
http://www.novotechnik.com/
popups/rotary1.html
04/07/08
GL100
$127.00
$254.00
Speed Controller
2
AX0500
$158.00
$316.00
I/O Relay Board
1
TE-049-000
$58.00
$58.00
Joystick
1
http://www.roboteq.com/ax50
0-folder.html
http://www.superdroidrobots.
com/shop/item.asp?itemid=54
7
Microsoft
purchased
XBox Controller, XBox
360 Controller
$40.00
$40.00
Fairlock Shaft Reducers & Extenders
1
http://www.sdp-si.com/
one week
delivery
S52FCYM120080
$40.57
$40.57
Shaft Collars - 2. I.D., 3. O.D., 11/16
Wide, Two-Piece, Aluminum
4
http://www.reidsupply.com/d
etail.aspx?R=CTC162A&ST=shaft%20collars
one week
delivery
CTC-162A
$20.19
$80.76
MOTOR + GEARHEAD + ENCODER +
AB 28 BRAKE
1
Maxon
4/25/2008
$843.95
$843.95
MOTOR + GEARHEAD + ENCODER +
AB 28 BRAKE
1
Maxon
4/25/2008
MOTOR + GEARHEAD + ENCODER +
AB 28 BRAKE
1
Maxon
4/25/2008
MOTOR + GEARHEAD + MR ENCODER
(512 CPT, 3 CH)
1
Maxon
4/25/2008
Coil Wire
10
Mounting Rings
1
Lower and Upper Links 12'' each
1
Tubing 12'' L
1
Tubing 12'' L
1
Tubing 12'' L
1
Tubing 12'' L
1
Tubing 24'' L
1
Aluminum Square 1.25'' a side
1
http://www.speedymetals.com
/ps-2470-76-3-rd-6061-t6511aluminum-extruded.aspx
http://www.metalsupermarket
s.com/MSCMetalGuide.aspx?ProductID=8
http://www.speedymetals.com
/ps-4605-193-2-od-x-0125-walltube-6061-t6-aluminum.aspx
http://www.speedymetals.com
/pc-4592-8371-2-14-od-x-0125wall-tube-6061-t6aluminum.aspx
http://www.speedymetals.com
/pc-4609-8371-3-14-od-x-125wall-tube-6061-t6aluminum.aspx
http://www.speedymetals.com
/pc-4612-8371-3-12-od-x-250wall-tube-6061-t6aluminum.aspx
http://www.speedymetals.com
/pc-4619-8371-3-od-x-025-walltube-6061-t6-aluminum.aspx
http://www.speedymetals.com
/pc-2499-8378-1-14-sq-6061t6511-aluminumextruded.aspx
one week
delivery
one week
delivery
2 days
2 days
RE40 #148867,
GP52C(676:1)
#223110, #110512 HP
HEDL#273752,
5540, #228387
RE35
GP42C
(676:1) #203140,
$1,376.65
#110512, AB 28
RE25 #118751,
GP32C(1093:1)
$1,418.40
#166961, #110512
ENCODER, 228387 AB
RE-MAX 24 #222049,
GP22C (850:1)
$380.35
#144005, MR
#201940 (512 CPT, 3
$10.00
3" {A} Rd 6061-T6511
Aluminum, Extruded
0.065'' wall x 2.00''
OD x 24.0'' LG 6061T6 drawn seamless
tubing
2" OD {A}
x 1.750" ID
$1,376.65
$1,418.40
$380.35
$100.00
$39.83
$39.83
$39.26
$39.26
2 days
{B} x .125" Wall {C}
Tube 6061-T6
Aluminum
2-1/4"
OD {A} x
$4.19
$4.19
2 days
2.000" ID {B} x .125"
Wall {C} Tube 6061-T6
Aluminum
3-1/4"
OD {A} x
3.000" ID {B} x .125"
Wall {C} Tube 6061-T6
Aluminum
3-1/2"
OD {A} x
$6.87
$6.87
$8.80
$8.80
3.000" ID {B} x .250"
Wall {C} Tube 6061-T6
3" ODAluminum
{A} x 2.500" ID
$14.05
$14.05
$24.31
$24.31
$7.97
$7.97
2 days
2 days
2 days
2 days
{B} x .250" Wall {C}
Tube 6061-T6
Aluminum
1-1/4" {A} Sq 6061T6511 Aluminum,
Extruded
Appendix E1
Gripper Components
(Jeremy Nugent)
Part Description
Quantity
Manufacturer
Delivery/
Lead time
Part #
Cost per
Unit
Total
Cost
Nylon Flange
Metric 18-8 SS Cup Point
Socket Set Screw M4 Size,
4mm Length, .7mm Pitch
Gears
6
http://www.mcmaster.com/
3 days
6294K203
$2.92
$17.52
1
http://www.mcmaster.com/
3 days
92015A110
$10.03
$10.03
4
7 days
P32A26-22
$11.83
$47.30
Servo Motor
1
http://www.wmberg.com/
http://www.robotmarketplace.c
om/products/0-HSR5990TG.html
Hitec hsr-5990tg
$105.00
$105.00
1
http://www.mcmaster.com/
3 days
91292A038
$7.05
$7.05
1
http://www.mcmaster.com/
3 days
91292A116
$6.35
$6.35
1
http://www.mcmaster.com/
3 days
91292A110
$10.03
$10.03
1
http://www.mcmaster.com/
3 days
92125A188
$4.10
$4.10
Aluminum Rod 1" D
1
http://www.mcmaster.com/
3 days
6750K191
$19.56
$19.56
Aluminum Rod 1/4" D
1
http://www.mcmaster.com/
3 days
6750K131
$3.03
$3.03
Aluminum 5/8" X 1"
1
http://www.mcmaster.com/
3 days
8975K123
$18.10
$18.10
Aluminum 1/4" X 1 1/4"
1
http://www.mcmaster.com/
3 days
8975K458
$17.72
$17.72
Aluminum 1" X 1 1/4"
1
http://www.mcmaster.com/
3 days
8975K492
$12.26
$12.26
Aluminum 5/8" X 2"
1
http://www.mcmaster.com/
3 days
8975K771
$13.15
$13.15
Aluminum 1/8" x 2"
1
http://www.mcmaster.com/
3 days
9041K11
$6.22
$6.22
Aluminum 1 1/2" x 3"
1
http://www.mcmaster.com/
3 days
8975K315
$36.01
$36.01
Aluminum 1/8" x 1 1/2"
1
http://www.mcmaster.com/
3 days
8975K34
$12.97
$12.97
Aluminum 3/8" x 3/4"
1
http://www.mcmaster.com/
3 days
8975K463
$15.94
$15.94
Metric 18-8 SS Socket Head
Cap Screw M4 Thread,
14mm Length, 0.7mm Pitch
Metric 18-8 SS Socket Head
Cap Screw M4 Thread,
10mm Length, 0.7mm Pitch
Metric 18-8 SS Socket Head
Cap Screw M3 Thread,
5mm Length, 0.5mm Pitch
Metric 18-8 SS Flat Head
Socket Cap Screw M4 Size,
8mm Length, .70mm Pitch
Total
Arm Components
Grand Total
$362.34
$6,113.14
$6,475.48
Appendix E1
APPENDIX F – SUPPORT LETTER
First-Response Robotics, LLC.
4010 Bach Buxton Road
Amelia, Ohio 45102
Office – 513-752-6653
Fax – 513-752-6687
University of Cincinnati
College of Applied Science
2220 Victory Parkway
Cincinnati, Ohio 45206-2839
December 3, 2007
Muthar Al-Ubaidi,
First-Response Robotics, LLC would like to thank the University Of Cincinnati College Of Applied
Science with the opportunity to work with your team on the robotic arm project.
Sergey Zhemchuzhny and Jeremy Nugent have shown an extremely high level of enthusiasm with
this project. Since they are the primary design engineers, their contributions will not go without
notice. First Response Robotics, LLC would like to donate our team with all manufacturing
requirements needed in order to build the robotic arm for the “HERO” robot. This will include all
materials, tooling and assembly work to complete the job. Included with this grant is the financial
support needed to purchase necessary materials.
Mr. Zhemchuzhny and Mr. Nugent along with the University of Cincinnati will not be paid for their
research and development. They will be acknowledged as the design engineers on this project but
will not be awarded any rights for their designs. All rights and designs will be the property of FirstResponse Robotics, LLC.
The cost for materials will need to be approved by First Response Robotics, LLC. and assigned a
purchase order number. We look forward to Tech Expo 2008 and will support your team with this
project with the same amount of enthusiasm.
Sincerely,
Mike Cardarelli
President
First-Response Robotics, LLC.
Appendix F1
APPENDIX G – PRODUCT OBJECTIVE TABLE
Appendix G1
APPENDIX H – CALCULATIONS
ANGULAR VELOCITY, ACCELERATION, AND DYNAMIC TORQUE CALCULATIONS
Given time to raise the arm from 0 to 90 degrees is 3 sec. then,
1
90! $%&.
4
)
$%&
60%+
$%&
' (*
,
5
3%+
1.
.
Writing the Newtons’ equilibrium equations:
4
0 1 .21 3 6 7$
5
4
0 8 .28 3 6 $'9
5
0 :! ;! 7
1
< +=> ? %$%<+@A2$ <2+% C$=. % A% =C C=$+%.
2
1
;! .9 ? 2@.%< A%<%$ =A< $=< C=$ .A+D
3
+% <= = =E %F2+ 2% =C % +=.=%
<9>
7 9
<
1
1
<9>
.5 3 +=>6 .9 9
2
3
<
35
<9>
+=> 9
2
<
9
< >
< <>
<' <' <> <'
3 6
'
9
<
< <
<
<> < <>
<' 35
'
+=>
<>
<>
2
Appendix H1
35
+=> <>
2
35
G '<' G +=><>
2
1 9 35
' > H 2
2
2 ' 0 E% > 0, %
35
1 9
0 0 H 2
2
35
0
0 H 2
0
1 9 35
' > H 0
2
2
'<' 35
' I >
To find angular acceleration, differentiate the following function with respect to time:
<'
7
<
<'
1
35
7
J 2 ' 3 +=>6
<
2
2
KL
7 9
+=>
;! 7
Tables below show the results of the dynamic loading calculations based on the above
formulae.
At pitch joint J2:
Appendix H2
Acceleration
Due To
Gravity
(ft/sec^2)
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
Arm
Length
(ft)
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
3.33
Angle Angular
Inertia (ft(degree Velocity
lb-s^2)
s)
(rad/sec)
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
1.72188
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
0.0000
0.7114
1.0059
1.2318
1.4222
1.5897
1.7409
1.8798
2.0088
2.1297
2.2438
2.3521
2.4553
2.5539
2.6485
2.7394
2.8270
2.9116
2.9933
3.0724
3.1491
3.2235
3.2957
3.3659
3.4342
3.5006
3.5652
3.6282
3.6895
3.7493
3.8076
3.8644
3.9199
3.9740
4.0267
4.0782
4.1284
4.1774
4.2252
4.2718
4.3173
4.3616
4.4049
4.4470
4.4881
4.5282
4.5672
4.6052
4.6422
4.6782
4.7132
4.7472
4.7803
4.8124
4.8436
4.8739
4.9032
4.9316
4.9591
4.9858
5.0115
5.0363
5.0602
5.0833
5.1055
5.1268
5.1472
5.1668
5.1856
5.2034
5.2205
5.2367
5.2520
5.2665
5.2802
5.2930
5.3050
5.3161
5.3264
5.3359
5.3446
5.3524
5.3595
5.3656
5.3710
5.3756
5.3793
5.3822
5.3843
5.3856
5.3860
Angular
Torque(ftTorque(inAngular
Torque(Nm)
Acceleratio Torque(ftlb)with a
Torque(inlb)with a
Velocity
with a sefety
n
lb)
sefety factor
lb)
sefety factor
(rev/min)
factor of 1.25
(rad/sec^2)
of 1.25
of 1.25
0.0000
6.7963
9.6108
11.7692
13.5875
15.1878
16.6328
17.9596
19.1923
20.3477
21.4380
22.4724
23.4579
24.4002
25.3039
26.1727
27.0097
27.8175
28.5985
29.3544
30.0870
30.7976
31.4877
32.1583
32.8104
33.4448
34.0625
34.6641
35.2502
35.8214
36.3784
36.9214
37.4511
37.9677
38.4718
38.9635
39.4432
39.9112
40.3678
40.8133
41.2477
41.6715
42.0847
42.4875
42.8801
43.2627
43.6355
43.9985
44.3518
44.6957
45.0303
45.3555
45.6716
45.9786
46.2766
46.5657
46.8460
47.1175
47.3804
47.6346
47.8803
48.1175
48.3462
48.5665
48.7785
48.9821
49.1775
49.3647
49.5437
49.7145
49.8772
50.0318
50.1783
50.3168
50.4473
50.5698
50.6843
50.7909
50.8895
50.9802
51.0630
51.1379
51.2050
51.2642
51.3155
51.3589
51.3945
51.4223
51.4422
51.4543
51.4586
14.5045
14.5023
14.4957
14.4846
14.4692
14.4494
14.4251
14.3965
14.3635
14.3261
14.2844
14.2383
14.1879
14.1331
14.0741
14.0108
13.9432
13.8714
13.7953
13.7151
13.6307
13.5421
13.4494
13.3526
13.2518
13.1469
13.0380
12.9252
12.8084
12.6877
12.5632
12.4348
12.3027
12.1668
12.0272
11.8840
11.7371
11.5867
11.4327
11.2753
11.1144
10.9501
10.7826
10.6117
10.4376
10.2603
10.0799
9.8965
9.7100
9.5206
9.3282
9.1331
8.9351
8.7345
8.5311
8.3252
8.1168
7.9059
7.6925
7.4769
7.2589
7.0388
6.8165
6.5921
6.3657
6.1374
5.9073
5.6753
5.4416
5.2062
4.9693
4.7308
4.4909
4.2497
4.0071
3.7633
3.5184
3.2724
3.0254
2.7775
2.5288
2.2793
2.0291
1.7782
1.5269
1.2750
1.0228
0.7703
0.5175
0.2646
0.0116
24.9750
24.9712
24.9598
24.9408
24.9142
24.8801
24.8383
24.7890
24.7322
24.6678
24.5960
24.5166
24.4298
24.3355
24.2339
24.1249
24.0085
23.8848
23.7539
23.6157
23.4703
23.3178
23.1582
22.9916
22.8180
22.6374
22.4499
22.2556
22.0545
21.8467
21.6323
21.4113
21.1837
20.9498
20.7094
20.4628
20.2099
19.9508
19.6857
19.4146
19.1376
18.8548
18.5663
18.2720
17.9723
17.6670
17.3564
17.0405
16.7194
16.3932
16.0621
15.7260
15.3852
15.0397
14.6896
14.3350
13.9761
13.6129
13.2456
12.8742
12.4990
12.1199
11.7371
11.3508
10.9610
10.5679
10.1716
9.7721
9.3697
8.9645
8.5565
8.1459
7.7328
7.3174
6.8998
6.4800
6.0583
5.6347
5.2095
4.7826
4.3543
3.9246
3.4938
3.0619
2.6291
2.1954
1.7611
1.3263
0.8910
0.4555
0.0199
31.2188
31.2140
31.1998
31.1760
31.1428
31.1001
31.0479
30.9863
30.9152
30.8348
30.7449
30.6458
30.5372
30.4194
30.2924
30.1561
30.0106
29.8560
29.6923
29.5196
29.3379
29.1473
28.9478
28.7395
28.5224
28.2967
28.0624
27.8195
27.5682
27.3084
27.0404
26.7641
26.4797
26.1872
25.8868
25.5784
25.2623
24.9386
24.6072
24.2683
23.9221
23.5685
23.2078
22.8400
22.4653
22.0838
21.6955
21.3006
20.8993
20.4916
20.0776
19.6575
19.2315
18.7996
18.3620
17.9188
17.4701
17.0162
16.5570
16.0928
15.6237
15.1499
14.6714
14.1885
13.7013
13.2099
12.7145
12.2152
11.7122
11.2056
10.6956
10.1824
9.6660
9.1468
8.6247
8.1000
7.5729
7.0434
6.5118
5.9782
5.4428
4.9058
4.3672
3.8274
3.2863
2.7443
2.2014
1.6579
1.1138
0.5694
0.0249
299.7000
299.6544
299.5176
299.2897
298.9707
298.5607
298.0599
297.4683
296.7863
296.0139
295.1515
294.1992
293.1575
292.0265
290.8066
289.4983
288.1018
286.6177
285.0464
283.3883
281.6440
279.8140
277.8989
275.8991
273.8155
271.6485
269.3988
267.0672
264.6542
262.1608
259.5876
256.9354
254.2050
251.3972
248.5130
245.5531
242.5185
239.4101
236.2288
232.9757
229.6517
226.2578
222.7950
219.2645
215.6672
212.0043
208.2768
204.4860
200.6330
196.7189
192.7450
188.7124
184.6224
180.4762
176.2751
172.0203
167.7132
163.3551
158.9472
154.4910
149.9878
145.4389
140.8458
136.2098
131.5323
126.8149
122.0588
117.2656
112.4368
107.5737
102.6778
97.7508
92.7940
87.8089
82.7971
77.7602
72.6995
67.6168
62.5134
57.3911
52.2513
47.0955
41.9255
36.7427
31.5487
26.3451
21.1335
15.9155
10.6926
5.4665
0.2387
374.6250
374.5680
374.3970
374.1121
373.7134
373.2009
372.5748
371.8354
370.9829
370.0174
368.9394
367.7490
366.4468
365.0331
363.5083
361.8728
360.1273
358.2721
356.3080
354.2354
352.0550
349.7675
347.3736
344.8739
342.2693
339.5606
336.7485
333.8339
330.8178
327.7010
324.4845
321.1692
317.7562
314.2465
310.6412
306.9414
303.1481
299.2626
295.2861
291.2196
287.0646
282.8222
278.4938
274.0806
269.5840
265.0053
260.3461
255.6076
250.7913
245.8987
240.9312
235.8905
230.7780
225.5952
220.3438
215.0254
209.6415
204.1938
198.6840
193.1137
187.4847
181.7986
176.0572
170.2622
164.4154
158.5186
152.5735
146.5821
140.5460
134.4671
128.3473
122.1885
115.9924
109.7611
103.4964
97.2002
90.8744
84.5210
78.1418
71.7389
65.3141
58.8694
52.4069
45.9284
39.4359
32.9314
26.4169
19.8943
13.3657
6.8331
0.2983
42.3326
42.3262
42.3069
42.2747
42.2296
42.1717
42.1010
42.0174
41.9211
41.8120
41.6901
41.5556
41.4085
41.2487
41.0764
40.8916
40.6944
40.4848
40.2628
40.0286
39.7822
39.5237
39.2532
38.9708
38.6764
38.3703
38.0526
37.7232
37.3824
37.0302
36.6667
36.2921
35.9065
35.5099
35.1025
34.6844
34.2557
33.8167
33.3673
32.9078
32.4383
31.9589
31.4698
30.9711
30.4630
29.9456
29.4191
28.8837
28.3394
27.7865
27.2252
26.6556
26.0779
25.4923
24.8989
24.2979
23.6895
23.0739
22.4513
21.8219
21.1858
20.5432
19.8945
19.2396
18.5789
17.9126
17.2408
16.5638
15.8817
15.1948
14.5032
13.8073
13.1071
12.4030
11.6951
10.9836
10.2688
9.5509
8.8300
8.1065
7.3805
6.6522
5.9220
5.1899
4.4563
3.7212
2.9851
2.2481
1.5103
0.7721
0.0337
At pitch joint J3
Appendix H3
Acceleration
Due To
Gravity
(ft/sec^2)
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
Arm
Length(ft)
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
2.00
Inertia (ft-lbs^2)
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
0.35196687
Angle
(degrees)
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
Angular
Velocity
(rad/sec)
0.0000
0.9179
1.2980
1.5895
1.8351
2.0512
2.2464
2.4256
2.5920
2.7481
2.8953
3.0350
3.1681
3.2954
3.4175
3.5348
3.6478
3.7569
3.8624
3.9645
4.0634
4.1594
4.2526
4.3432
4.4313
4.5169
4.6004
4.6816
4.7608
4.8379
4.9131
4.9865
5.0580
5.1278
5.1959
5.2623
5.3271
5.3903
5.4519
5.5121
5.5708
5.6280
5.6838
5.7382
5.7912
5.8429
5.8933
5.9423
5.9900
6.0365
6.0816
6.1256
6.1682
6.2097
6.2500
6.2890
6.3269
6.3635
6.3990
6.4334
6.4665
6.4986
6.5295
6.5592
6.5878
6.6154
6.6417
6.6670
6.6912
6.7143
6.7362
6.7571
6.7769
6.7956
6.8132
6.8298
6.8452
6.8596
6.8730
6.8852
6.8964
6.9065
6.9156
6.9236
6.9305
6.9364
6.9412
6.9449
6.9476
6.9492
6.9498
Angular
velocity
(rev/min)
0.0000
8.7697
12.4012
15.1864
17.5326
19.5976
21.4621
23.1741
24.7647
26.2556
27.6625
28.9972
30.2689
31.4848
32.6509
33.7719
34.8519
35.8943
36.9020
37.8774
38.8227
39.7397
40.6301
41.4954
42.3368
43.1555
43.9525
44.7287
45.4850
46.2222
46.9408
47.6415
48.3250
48.9916
49.6420
50.2765
50.8955
51.4994
52.0886
52.6634
53.2240
53.7707
54.3039
54.8237
55.3303
55.8240
56.3050
56.7734
57.2294
57.6731
58.1047
58.5244
58.9323
59.3284
59.7130
60.0860
60.4477
60.7981
61.1372
61.4653
61.7823
62.0883
62.3834
62.6677
62.9412
63.2040
63.4562
63.6977
63.9286
64.1490
64.3590
64.5585
64.7475
64.9263
65.0946
65.2527
65.4005
65.5380
65.6652
65.7823
65.8891
65.9858
66.0723
66.1486
66.2148
66.2709
66.3169
66.3527
66.3784
66.3940
66.3995
Angular
Torque(ftAcceleration
lb)
(rad/sec^2)
24.1500
24.1463
24.1353
24.1169
24.0912
24.0582
24.0178
23.9702
23.9152
23.8530
23.7835
23.7067
23.6228
23.5317
23.4334
23.3279
23.2154
23.0958
22.9692
22.8356
22.6950
22.5476
22.3933
22.2321
22.0642
21.8896
21.7083
21.5204
21.3260
21.1251
20.9177
20.7040
20.4840
20.2577
20.0253
19.7868
19.5423
19.2918
19.0355
18.7733
18.5055
18.2320
17.9530
17.6685
17.3786
17.0834
16.7831
16.4776
16.1671
15.8517
15.5315
15.2066
14.8770
14.5429
14.2043
13.8615
13.5144
13.1632
12.8081
12.4490
12.0861
11.7196
11.3494
10.9759
10.5990
10.2188
9.8356
9.4493
9.0602
8.6683
8.2738
7.8768
7.4774
7.0757
6.6718
6.2660
5.8582
5.4486
5.0374
4.6246
4.2104
3.7950
3.3784
2.9607
2.5422
2.1229
1.7030
1.2825
0.8616
0.4405
0.0192
8.5000
8.4987
8.4948
8.4884
8.4793
8.4677
8.4535
8.4367
8.4174
8.3955
8.3710
8.3440
8.3144
8.2824
8.2478
8.2107
8.1711
8.1290
8.0844
8.0374
7.9879
7.9360
7.8817
7.8250
7.7659
7.7044
7.6406
7.5745
7.5060
7.4353
7.3623
7.2871
7.2097
7.1301
7.0482
6.9643
6.8782
6.7901
6.6999
6.6076
6.5133
6.4171
6.3188
6.2187
6.1167
6.0128
5.9071
5.7996
5.6903
5.5793
5.4666
5.3522
5.2362
5.1186
4.9995
4.8788
4.7566
4.6330
4.5080
4.3816
4.2539
4.1249
3.9946
3.8631
3.7305
3.5967
3.4618
3.3259
3.1889
3.0510
2.9121
2.7724
2.6318
2.4904
2.3483
2.2054
2.0619
1.9177
1.7730
1.6277
1.4819
1.3357
1.1891
1.0421
0.8948
0.7472
0.5994
0.4514
0.3033
0.1550
0.0068
Torque(ftlb)with a
sefety factor
of 1.25
10.6250
10.6234
10.6185
10.6105
10.5991
10.5846
10.5669
10.5459
10.5217
10.4943
10.4637
10.4300
10.3931
10.3530
10.3097
10.2633
10.2138
10.1612
10.1055
10.0467
9.9849
9.9200
9.8521
9.7812
9.7073
9.6305
9.5508
9.4681
9.3826
9.2942
9.2029
9.1089
9.0121
8.9126
8.8103
8.7054
8.5978
8.4876
8.3748
8.2595
8.1416
8.0213
7.8986
7.7734
7.6459
7.5160
7.3839
7.2495
7.1129
6.9741
6.8332
6.6903
6.5453
6.3983
6.2493
6.0985
5.9458
5.7913
5.6350
5.4770
5.3174
5.1561
4.9933
4.8289
4.6631
4.4959
4.3272
4.1573
3.9861
3.8137
3.6401
3.4655
3.2897
3.1130
2.9353
2.7568
2.5774
2.3972
2.2162
2.0346
1.8524
1.6696
1.4863
1.3026
1.1185
0.9340
0.7492
0.5642
0.3791
0.1938
0.0085
Torque(in-lb)
102.0000
101.9845
101.9379
101.8604
101.7518
101.6123
101.4418
101.2405
101.0083
100.7455
100.4520
100.1279
99.7733
99.3884
98.9732
98.5279
98.0527
97.5476
97.0128
96.4485
95.8548
95.2320
94.5802
93.8996
93.1904
92.4529
91.6873
90.8937
90.0725
89.2239
88.3481
87.4455
86.5162
85.5606
84.5790
83.5716
82.5388
81.4809
80.3982
79.2910
78.1597
77.0046
75.8261
74.6245
73.4002
72.1536
70.8850
69.5948
68.2835
66.9514
65.5989
64.2264
62.8344
61.4233
59.9935
58.5455
57.0796
55.5963
54.0961
52.5795
51.0469
49.4987
47.9355
46.3577
44.7658
43.1602
41.5415
39.9102
38.2668
36.6117
34.9454
33.2685
31.5815
29.8849
28.1792
26.4649
24.7426
23.0127
21.2758
19.5325
17.7832
16.0285
14.2689
12.5050
10.7373
8.9663
7.1926
5.4167
3.6391
1.8605
0.0812
Torque(inlb)with a Torque(Nm)wi
sefety
th a sefety
factor of
factor of 1.25
1.25
127.5000
14.4075
127.4806 14.40530789
127.4224 14.39873224
127.3254 14.38777503
127.1897 14.37243961
127.0153 14.35273065
126.8022 14.32865414
126.5506
14.3002174
126.2604
14.2674291
125.9319
14.2302992
125.5649 14.18883901
125.1598 14.14306114
124.7166 14.09297953
124.2355 14.03860941
123.7165 13.97996733
123.1599 13.91707113
122.5658 13.84993995
121.9345 13.77859423
121.2660 13.70305566
120.5606 13.62334724
119.8185 13.53949323
119.0400 13.45151913
118.2252 13.35945173
117.3745 13.26331903
116.4881 13.16315029
115.5662 13.05897599
114.6091 12.95082784
113.6172 12.83873873
112.5906 12.72274279
111.5299
12.6028753
110.4352 12.47917275
109.3068 12.35167277
108.1453 12.22041416
106.9508 12.08543688
105.7237 11.94678198
104.4645 11.80449167
103.1735 11.65860924
101.8511 11.50917908
100.4978 11.35624667
99.1138 11.19985854
97.6997 11.04006229
96.2558 10.87690654
94.7827 10.71044093
93.2807 10.54071612
91.7503 10.36778377
90.1920 10.19169649
88.6063 10.01250786
86.9936 9.830272426
85.3544 9.645045626
83.6892
9.45688383
81.9986 9.265844296
80.2831 9.071985156
78.5431 8.875365403
76.7792 8.676044868
74.9919 8.474084205
73.1818
8.26954487
71.3495 8.062489104
69.4954 7.852979916
67.6202 7.641081059
65.7244 7.426857014
63.8086 7.210372969
61.8734 6.991694802
59.9194 6.770889055
57.9471
6.54802292
55.9572 6.323164216
53.9503 6.096381367
51.9269 5.867743383
49.8878
5.63731984
47.8335 5.405180855
45.7646 5.171397069
43.6818 4.936039621
41.5857 4.699180133
39.4769 4.460890679
37.3561 4.221243772
35.2240 3.980312337
33.0811 3.738169689
30.9282 3.494889513
28.7659 3.250545839
26.5948
3.00521302
24.4156 2.758965712
22.2290 2.511878849
20.0356 2.264027618
17.8362 2.015487442
15.6313 1.766333951
13.4216 1.516642963
11.2079 1.266490459
8.9907 1.015952561
6.7708 0.765105508
4.5489 0.514025632
2.3256 0.262789338
0.1015 0.011473077
At pitch joint J4
Appendix H4
Acceleration
Due To
Gravity
(ft/sec^2)
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
Arm
Length(ft)
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
0.67
Inertia (lb-fts^2)
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
0.03485248
Angle
(degrees)
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
Angular
Velocity
(rad/sec)
0.0000
1.5859
2.2426
2.7463
3.1705
3.5440
3.8811
4.1907
4.4784
4.7480
5.0024
5.2437
5.4737
5.6936
5.9045
6.1072
6.3025
6.4910
6.6732
6.8496
7.0206
7.1864
7.3474
7.5039
7.6560
7.8041
7.9482
8.0886
8.2254
8.3587
8.4886
8.6153
8.7389
8.8595
8.9771
9.0918
9.2038
9.3130
9.4195
9.5235
9.6248
9.7237
9.8201
9.9141
10.0057
10.0950
10.1820
10.2667
10.3492
10.4294
10.5075
10.5833
10.6571
10.7287
10.7983
10.8657
10.9311
10.9945
11.0558
11.1152
11.1725
11.2278
11.2812
11.3326
11.3821
11.4296
11.4752
11.5189
11.5606
11.6005
11.6384
11.6745
11.7087
11.7410
11.7715
11.8001
11.8268
11.8517
11.8747
11.8958
11.9152
11.9326
11.9483
11.9621
11.9741
11.9842
11.9925
11.9990
12.0036
12.0065
12.0075
Angular
Velocity
(rev/min)
0.0000
15.1517
21.4261
26.2381
30.2918
33.8595
37.0809
40.0387
42.7869
45.3628
47.7935
50.0995
52.2966
54.3975
56.4121
58.3490
60.2150
62.0160
63.7569
65.4422
67.0754
68.6597
70.1982
71.6931
73.1469
74.5614
75.9384
77.2795
78.5862
79.8597
81.1013
82.3120
83.4928
84.6446
85.7683
86.8645
87.9340
88.9774
89.9954
90.9884
91.9570
92.9017
93.8228
94.7209
95.5962
96.4492
97.2802
98.0894
98.8773
99.6439
100.3897
101.1148
101.8194
102.5039
103.1683
103.8128
104.4377
105.0430
105.6290
106.1958
106.7435
107.2723
107.7822
108.2733
108.7459
109.1999
109.6355
110.0528
110.4518
110.8326
111.1954
111.5400
111.8667
112.1755
112.4664
112.7395
112.9948
113.2324
113.4522
113.6545
113.8391
114.0061
114.1555
114.2874
114.4018
114.4987
114.5781
114.6400
114.6844
114.7114
114.7209
Torque(ftAngular
lb)with a
Acceleration Torque(ft-lb)
sefety factor
(rad/sec^2)
of 1.25
72.0896
72.0786
72.0457
71.9909
71.9141
71.8155
71.6950
71.5528
71.3887
71.2029
70.9955
70.7664
70.5158
70.2438
69.9503
69.6356
69.2997
68.9428
68.5648
68.1660
67.7464
67.3062
66.8455
66.3645
65.8633
65.3421
64.8009
64.2401
63.6597
63.0599
62.4409
61.8030
61.1462
60.4708
59.7771
59.0651
58.3352
57.5875
56.8223
56.0398
55.2402
54.4238
53.5909
52.7417
51.8764
50.9953
50.0987
49.1869
48.2601
47.3186
46.3627
45.3927
44.4089
43.4116
42.4010
41.3776
40.3416
39.2933
38.2330
37.1611
36.0779
34.9837
33.8789
32.7638
31.6387
30.5039
29.3599
28.2070
27.0454
25.8757
24.6980
23.5129
22.3206
21.1215
19.9159
18.7044
17.4871
16.2645
15.0369
13.8048
12.5685
11.3283
10.0847
8.8381
7.5887
6.3370
5.0834
3.8283
2.5720
1.3149
0.0574
2.5125
2.5121
2.5110
2.5091
2.5064
2.5029
2.4988
2.4938
2.4881
2.4816
2.4744
2.4664
2.4577
2.4482
2.4379
2.4270
2.4153
2.4028
2.3897
2.3758
2.3611
2.3458
2.3297
2.3130
2.2955
2.2773
2.2585
2.2389
2.2187
2.1978
2.1762
2.1540
2.1311
2.1076
2.0834
2.0586
2.0331
2.0071
1.9804
1.9531
1.9253
1.8968
1.8678
1.8382
1.8080
1.7773
1.7461
1.7143
1.6820
1.6492
1.6159
1.5820
1.5478
1.5130
1.4778
1.4421
1.4060
1.3695
1.3325
1.2952
1.2574
1.2193
1.1808
1.1419
1.1027
1.0631
1.0233
0.9831
0.9426
0.9018
0.8608
0.8195
0.7779
0.7361
0.6941
0.6519
0.6095
0.5669
0.5241
0.4811
0.4380
0.3948
0.3515
0.3080
0.2645
0.2209
0.1772
0.1334
0.0896
0.0458
0.0020
3.1406
3.1401
3.1387
3.1363
3.1330
3.1287
3.1234
3.1172
3.1101
3.1020
3.0930
3.0830
3.0721
3.0602
3.0474
3.0337
3.0191
3.0035
2.9871
2.9697
2.9514
2.9322
2.9122
2.8912
2.8694
2.8467
2.8231
2.7987
2.7734
2.7472
2.7203
2.6925
2.6639
2.6344
2.6042
2.5732
2.5414
2.5088
2.4755
2.4414
2.4066
2.3710
2.3347
2.2977
2.2600
2.2216
2.1826
2.1429
2.1025
2.0615
2.0198
1.9776
1.9347
1.8913
1.8472
1.8026
1.7575
1.7118
1.6656
1.6189
1.5718
1.5241
1.4760
1.4274
1.3784
1.3289
1.2791
1.2289
1.1783
1.1273
1.0760
1.0244
0.9724
0.9202
0.8677
0.8149
0.7618
0.7086
0.6551
0.6014
0.5476
0.4935
0.4393
0.3850
0.3306
0.2761
0.2215
0.1668
0.1121
0.0573
0.0025
Torque(in-lb)
30.1500
30.1454
30.1317
30.1087
30.0766
30.0354
29.9850
29.9255
29.8569
29.7792
29.6924
29.5966
29.4918
29.3780
29.2553
29.1237
28.9832
28.8339
28.6758
28.5090
28.3336
28.1495
27.9568
27.7556
27.5460
27.3280
27.1017
26.8671
26.6244
26.3735
26.1147
25.8479
25.5732
25.2907
25.0006
24.7028
24.3975
24.0848
23.7648
23.4375
23.1031
22.7617
22.4133
22.0581
21.6962
21.3278
20.9528
20.5714
20.1838
19.7900
19.3903
18.9846
18.5731
18.1560
17.7334
17.3053
16.8720
16.4336
15.9902
15.5419
15.0889
14.6312
14.1692
13.7028
13.2322
12.7577
12.2792
11.7970
11.3112
10.8220
10.3295
9.8338
9.3351
8.8336
8.3294
7.8227
7.3136
6.8023
6.2889
5.7736
5.2565
4.7378
4.2177
3.6963
3.1738
2.6503
2.1260
1.6011
1.0757
0.5499
0.0240
Torque(inTorque(Nm)wi
lb)with a
th a sefety
sefety factor
factor of 1.25
of 1.25
37.6875
37.6818
37.6646
37.6359
37.5958
37.5442
37.4813
37.4069
37.3211
37.2240
37.1155
36.9958
36.8648
36.7225
36.5691
36.4046
36.2290
36.0424
35.8448
35.6363
35.4169
35.1868
34.9460
34.6945
34.4325
34.1600
33.8771
33.5839
33.2805
32.9669
32.6433
32.3098
31.9665
31.6134
31.2507
30.8785
30.4969
30.1060
29.7060
29.2969
28.8789
28.4521
28.0166
27.5727
27.1203
26.6597
26.1910
25.7143
25.2298
24.7376
24.2378
23.7307
23.2164
22.6950
22.1667
21.6317
21.0901
20.5420
19.9877
19.4274
18.8611
18.2891
17.7115
17.1285
16.5403
15.9471
15.3490
14.7462
14.1390
13.5275
12.9118
12.2922
11.6689
11.0420
10.4118
9.7784
9.1420
8.5029
7.8611
7.2170
6.5706
5.9223
5.2722
4.6204
3.9673
3.3129
2.6576
2.0014
1.3446
0.6874
0.0300
4.2586875
4.258039539
4.256095852
4.252857032
4.248324063
4.242498325
4.235381591
4.226976026
4.217284189
4.206309028
4.194053884
4.180522485
4.165718949
4.149647781
4.132313872
4.113722495
4.093879309
4.072790352
4.050462041
4.02690117
4.00211491
3.976110802
3.948896761
3.920481066
3.890872365
3.860079668
3.828112346
3.794980125
3.760693088
3.725261669
3.68869665
3.651009156
3.612210657
3.572312959
3.531328203
3.489268861
3.446147731
3.401977934
3.356772913
3.310546423
3.26331253
3.215085608
3.165880333
3.115711678
3.064594908
3.01254558
2.959579531
2.905712879
2.850962016
2.795343603
2.738874564
2.681572083
2.623453597
2.564536792
2.504839596
2.444380175
2.383176926
2.321248475
2.258613666
2.195291559
2.131301422
2.066662728
2.001395147
1.93551854
1.869052952
1.80201861
1.734435912
1.666325423
1.59770787
1.528604134
1.459035241
1.389022363
1.318586804
1.247749997
1.1765335
1.104958982
1.033048224
0.960823108
0.888305613
0.815517806
0.742481836
0.669219928
0.595754376
0.522107536
0.448301817
0.37435968
0.300303625
0.226156187
0.15193993
0.077677437
0.003391307
At roll joint J5
Appendix H5
Acceleration
Due To Gravity
(ft/s^2)
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
32.2
Arm Length(ft)
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
0.46
Inertia(ft-lbs^2)
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
0.015333333
Angle
(degrees)
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
Angular
Velocity
(rad/sec)
0.0000
1.9139
2.7065
3.3144
3.8264
4.2771
4.6840
5.0576
5.4048
5.7302
6.0372
6.3285
6.6060
6.8714
7.1259
7.3706
7.6063
7.8338
8.0537
8.2666
8.4729
8.6730
8.8673
9.0562
9.2398
9.4185
9.5924
9.7618
9.9269
10.0878
10.2446
10.3975
10.5467
10.6922
10.8341
10.9726
11.1077
11.2395
11.3681
11.4935
11.6159
11.7352
11.8516
11.9650
12.0756
12.1833
12.2883
12.3905
12.4900
12.5869
12.6811
12.7727
12.8617
12.9481
13.0321
13.1135
13.1924
13.2689
13.3429
13.4145
13.4837
13.5505
13.6149
13.6769
13.7366
13.7940
13.8490
13.9017
13.9521
14.0002
14.0460
14.0896
14.1308
14.1698
14.2066
14.2411
14.2733
14.3033
14.3311
14.3567
14.3800
14.4011
14.4200
14.4366
14.4511
14.4633
14.4733
14.4811
14.4868
14.4902
14.4914
Angular
Velocity
(rev/min)
0.0000
18.2860
25.8583
31.6659
36.5581
40.8639
44.7516
48.3213
51.6380
54.7467
57.6803
60.4633
63.1149
65.6504
68.0818
70.4193
72.6713
74.8449
76.9460
78.9798
80.9509
82.8630
84.7197
86.5239
88.2784
89.9855
91.6473
93.2659
94.8429
96.3799
97.8783
99.3395
100.7645
102.1546
103.5107
104.8337
106.1244
107.3837
108.6122
109.8107
110.9797
112.1197
113.2314
114.3153
115.3717
116.4011
117.4040
118.3807
119.3314
120.2567
121.1567
122.0318
122.8823
123.7083
124.5101
125.2880
126.0421
126.7727
127.4799
128.1640
128.8249
129.4631
130.0784
130.6712
131.2415
131.7895
132.3152
132.8188
133.3004
133.7600
134.1977
134.6137
135.0080
135.3806
135.7317
136.0613
136.3694
136.6561
136.9215
137.1655
137.3883
137.5899
137.7702
137.9294
138.0675
138.1844
138.2802
138.3549
138.4086
138.4411
138.4526
Angular
Acceleration
(rad/sec^2)
105.0000
104.9840
104.9361
104.8562
104.7445
104.6008
104.4254
104.2181
103.9792
103.7086
103.4064
103.0728
102.7078
102.3116
101.8842
101.4258
100.9366
100.4166
99.8661
99.2852
98.6741
98.0329
97.3620
96.6614
95.9313
95.1721
94.3840
93.5671
92.7217
91.8481
90.9466
90.0174
89.0608
88.0771
87.0666
86.0296
84.9664
83.8774
82.7629
81.6231
80.4585
79.2695
78.0563
76.8194
75.5591
74.2758
72.9699
71.6418
70.2918
68.9205
67.5283
66.1155
64.6825
63.2299
61.7580
60.2674
58.7584
57.2315
55.6872
54.1260
52.5483
50.9546
49.3454
47.7211
46.0824
44.4296
42.7634
41.0841
39.3923
37.6885
35.9732
34.2470
32.5104
30.7639
29.0080
27.2433
25.4703
23.6896
21.9016
20.1070
18.3062
16.4999
14.6886
12.8728
11.0531
9.2300
7.4041
5.5760
3.7462
1.9152
0.0836
Torque(ft-lb)
1.6100
1.6098
1.6090
1.6078
1.6061
1.6039
1.6012
1.5980
1.5943
1.5902
1.5856
1.5804
1.5749
1.5688
1.5622
1.5552
1.5477
1.5397
1.5313
1.5224
1.5130
1.5032
1.4929
1.4821
1.4709
1.4593
1.4472
1.4347
1.4217
1.4083
1.3945
1.3803
1.3656
1.3505
1.3350
1.3191
1.3028
1.2861
1.2690
1.2516
1.2337
1.2155
1.1969
1.1779
1.1586
1.1389
1.1189
1.0985
1.0778
1.0568
1.0354
1.0138
0.9918
0.9695
0.9470
0.9241
0.9010
0.8775
0.8539
0.8299
0.8057
0.7813
0.7566
0.7317
0.7066
0.6813
0.6557
0.6300
0.6040
0.5779
0.5516
0.5251
0.4985
0.4717
0.4448
0.4177
0.3905
0.3632
0.3358
0.3083
0.2807
0.2530
0.2252
0.1974
0.1695
0.1415
0.1135
0.0855
0.0574
0.0294
0.0013
Torque(in- Torque(N
Torque(ftlb)with a m)with a
lb)with a
Torque(in-lb) sefety
sefety
sefety factor of
factor of factor of
1.25
1.25
1.25
2.0125
2.0122
2.0113
2.0097
2.0076
2.0048
2.0015
1.9975
1.9929
1.9877
1.9820
1.9756
1.9686
1.9610
1.9528
1.9440
1.9346
1.9247
1.9141
1.9030
1.8913
1.8790
1.8661
1.8527
1.8387
1.8241
1.8090
1.7934
1.7772
1.7604
1.7431
1.7253
1.7070
1.6881
1.6688
1.6489
1.6285
1.6077
1.5863
1.5644
1.5421
1.5193
1.4961
1.4724
1.4482
1.4236
1.3986
1.3731
1.3473
1.3210
1.2943
1.2672
1.2397
1.2119
1.1837
1.1551
1.1262
1.0969
1.0673
1.0374
1.0072
0.9766
0.9458
0.9147
0.8832
0.8516
0.8196
0.7874
0.7550
0.7224
0.6895
0.6564
0.6231
0.5896
0.5560
0.5222
0.4882
0.4540
0.4198
0.3854
0.3509
0.3162
0.2815
0.2467
0.2119
0.1769
0.1419
0.1069
0.0718
0.0367
0.0016
19.3200
19.3171
19.3082
19.2935
19.2730
19.2466
19.2143
19.1761
19.1322
19.0824
19.0268
18.9654
18.8982
18.8253
18.7467
18.6624
18.5723
18.4767
18.3754
18.2685
18.1560
18.0381
17.9146
17.7857
17.6514
17.5117
17.3666
17.2163
17.0608
16.9001
16.7342
16.5632
16.3872
16.2062
16.0203
15.8294
15.6338
15.4334
15.2284
15.0187
14.8044
14.5856
14.3624
14.1348
13.9029
13.6667
13.4265
13.1821
12.9337
12.6814
12.4252
12.1652
11.9016
11.6343
11.3635
11.0892
10.8115
10.5306
10.2464
9.9592
9.6689
9.3756
9.0795
8.7807
8.4792
8.1751
7.8685
7.5595
7.2482
6.9347
6.6191
6.3015
5.9819
5.6606
5.3375
5.0128
4.6865
4.3589
4.0299
3.6997
3.3683
3.0360
2.7027
2.3686
2.0338
1.6983
1.3624
1.0260
0.6893
0.3524
0.0154
24.1500
24.1463
24.1353
24.1169
24.0912
24.0582
24.0178
23.9702
23.9152
23.8530
23.7835
23.7067
23.6228
23.5317
23.4334
23.3279
23.2154
23.0958
22.9692
22.8356
22.6950
22.5476
22.3933
22.2321
22.0642
21.8896
21.7083
21.5204
21.3260
21.1251
20.9177
20.7040
20.4840
20.2577
20.0253
19.7868
19.5423
19.2918
19.0355
18.7733
18.5055
18.2320
17.9530
17.6685
17.3786
17.0834
16.7831
16.4776
16.1671
15.8517
15.5315
15.2066
14.8770
14.5429
14.2043
13.8615
13.5144
13.1632
12.8081
12.4490
12.0861
11.7196
11.3494
10.9759
10.5990
10.2188
9.8356
9.4493
9.0602
8.6683
8.2738
7.8768
7.4774
7.0757
6.6718
6.2660
5.8582
5.4486
5.0374
4.6246
4.2104
3.7950
3.3784
2.9607
2.5422
2.1229
1.7030
1.2825
0.8616
0.4405
0.0192
2.72895
2.728535
2.727289
2.725214
2.722309
2.718576
2.714016
2.708629
2.702419
2.695386
2.687533
2.678862
2.669376
2.659078
2.64797
2.636057
2.623342
2.609828
2.59552
2.580422
2.564539
2.547876
2.530437
2.512229
2.493256
2.473524
2.453039
2.431808
2.409837
2.387133
2.363702
2.339552
2.31469
2.289124
2.262861
2.23591
2.208278
2.179974
2.151007
2.121385
2.091118
2.060214
2.028684
1.996536
1.96378
1.930427
1.896487
1.861969
1.826885
1.791245
1.75506
1.718341
1.681099
1.643345
1.605091
1.566349
1.52713
1.487447
1.447311
1.406734
1.365729
1.324309
1.282486
1.240273
1.197682
1.154726
1.11142
1.067775
1.023805
0.979523
0.934944
0.89008
0.844945
0.799553
0.753918
0.708053
0.661973
0.615692
0.569223
0.522581
0.475779
0.428833
0.381757
0.334564
0.28727
0.239888
0.192433
0.14492
0.097363
0.049775
0.002173
Appendix H6
STATIC TORQUE, GEAR REDUCTION, AND TORQUE CONSTANT CALCULATIONS
Given: Payload =5.0 lbs, Gripper 1.03 lbs, Upper, Lower Arm=0.22 lbs each, thus
Rated static torque is:
M Based on the above formula and excel tool, the value of the rated torque was calculated for
each joint (see Table below)
POSITION
MASS,(lb)
PAYLOAD
5.000
Gripper
1.030
J5 (Tool Roll)
1.342
J4 (Wrist Pitch)
3.321
Upper Arm
0.220
J3 (Elbow Pitch)
5.000
Lower Arm
0.220
GEOMERTY
CG INS TO
NEXT AXIS
AXIAL
GEOMETRY
POSITION
MASS,(lb)
(REPEAT)
J2 (Shoulder Pitch)
6.272
J1 (Shoulder Roll)
0.000
TOTAL:
16.375
PLD TR
OFFSET
WP-TR CG
4.1
PLD-WP
7
GRP-WP
4.037
3.04
ELB-UA CG
7
SHP-LA CG
7
WP-ELB
14
ELB-SHP
14
20.50
2.32
43.24
4.89
Gear Reducer
1.25
% C'APTY
MARGIN
REPEAT
IN-LB
w/o Margin
Gear Reducer
% C'APTY
REPEAT
w/ Margin
Gear
RATIO
MOTOR CONT
Kt
TORQUE
OZ IN/A
IN-LB
25.63
2.90
54.05
6.11
51%
850
0.03
2.139
54%
1093
0.05
2.309
50
41%
100
43%
194.48
21.98
300
65%
243.10
27.47
81%
676
0.36
2.748
418.80
47.32
418.80
500
84%
523.50
59.16
105%
676
0.77
4.278
500
0
FRR Manipulator System
LENGTH
32.037 IN
0.82 M
Appendix H7
0.000
SHP
LA
ELB
UA
WP
GRP
TR
PLD
Shoulder
Lower Arm
Elbow
Upper Arm
Wrist Pitch
Gripper
Tool Roll
Payload
RADIAL FORCE CALCULATION AT J2 TO CHECK THE PRELOADED BEARING ON THE
OUTPUT SHAFT OF THE GEARBOX GP52C
Given: ω=0 rad/sec; α=14.51 rad/sec2; Weight W=15lb; Payload=5lb;
0 8 .$'9 N O8 .$'9 0AP
0 1 .$7 N O1 ? 4 ? 5AP .7
15AP
1C
$2<
O1 ? 15AP ? 5AP Q
R 40 3
6 14.51 3 9 6
C
12
32.2 9
O1 20AP H 22.53AP 42.5AP
1X
OSTUVTW 42.5 AP =$ 42.5 AP 189 X
0.225 AP
:! ;! 7 1 15AP
$2<
Y
Z 14.51 9
C
3
32.2 3 9 6
2.25C ? AP =$ 2.25C ? AP 1.356X.
[ 3.1X.
1C ? AP
Given: ω=5.3860 rad/sec; α=0 rad/sec2; Weight W=15lb; Payload=5lb;
0 8 .$'9 N O8 .'9
15AP
1C
$2< 9
O8 Q
R 40 3
6 35.386
6 45 AP
C
12
32.2 9
0 1 .7 N O1 ? 4 ? 5AP 0
OSTUVTW
O1 20 AP H 5AP0 20 AP
\O8 9 H O1 9 \45AP9 H 20AP9
1X
49.3 AP =$ 49.3 AP [ 220 X
0.225 AP
GP52-C KEYWAY STRESS CALCULATIONS
Appendix H8
D=.47244” L= .7874”
b=h=.157”
T=571.75 in*lb with 1.25 S.F.
As = .157 * .7874 = .1236 in2
2
]
2 ^ 571.75
2,420.4 AP
. 47244
M
2420.4
M
19,582.63 . 1236
BENDING STRESS AND OUTSIDE DIAMETER SELECTION
What material can handle:
Aluminum
Su= 45000
U_.`)^*`aaa_99b`a
Largest Moment at J2 = 462 in-lb
Sy=40,000
U .61 ^ 40000 24400
cdef_g
h
462
22950 .0201307K
Section Modulus (S) = .0201307K
X=1.8799in
ij * ? j ?* 2 ^ 32
. 0201307 1
i (F * ? kF ? 64l,
2 ^ 32
Outside Diameter must be at least 1.8799” with a wall thickness of 1/64”.
DETERMINING FILLET WELD SIZE ON THE J2 LINK HOUSING
Appendix H9
A tentative fillet size has to be assumed. The worst load is static at the full extension; the
probable failure mode is yielding.
The yield strength for an E-4043 electrode is
mn [ 18,000 Using the specified safety factor of 1.25 and the distortion energy theory,
Mmn
0.577mn
MU 0.461618,000.0 8,308.8 1.25
1.25
Using
Mo p a.rars
, Where Lw-effective weld length, h-weld bead size;
q
t
Appendix H10
o 2i$ 23.14161 6.2832 ,
Where r-radius of the tubing
Using above equation, the following assumption was made:
MU 1.25Mo 0.707o
Solving for weld size h gives:
Assume 1/64 weld bead
20AP
0.0005 0.7076.28328,308.8 The weld centroidal coordinates relative to center of the tubing
A1
A2
A3
0
A1
A2
A3
0
Area, in2
1.2*0.125=0.150
(0.07*0.125)/2=0.027
(0.12*0.10)/2=0.006
0.160375
ju ∑ V ju 0.04994K
0.3114 ∑ V
0.16039
Area, in2
1.2*0.125=0.150
(0.07*0.125)/2=0.027
(0.12*0.10)/2=0.006
0.160375
wu Centroid of the weld itself Du Xi, in
0.3
0.635
0.36
Yi, in
0.9375
0.125/3+.875=0.917
.10/3+1=1.033
AiXi, in3
0.045
0.00278
0.00216
0.04994
AiYi, in3
0.140625
0.004012
0.006199
0.150837
∑ V wu 0.150837K
0.9405 ∑ V
0.16039
s
K
a.)
K
0.0333 zt
x ∑8V_) yV k )9
H $V9 l|, Where
$V $2<@ C$=. }= +%$=< = E%A< +%$=< C=$ % E%A<
0.1
$Vm 1 ? 0.9405 H
0.09283 3
Using the polar moment of inertia about the joint centroid for 0.015625in weld is
{
Appendix H11
0.12
0.2986 2
$V \0.2986 9 H 0.09283 9 0.3127 $V~ 1.15 ? 0.3114 H 0.6 H
x
V 9oV
, =A2$ .=.% =C %$2 2P=@ =E +%=<
12
Polar moment of inertial with a transfer term ri for a weldment
8
9Vo
x 0 V (
H $V9 ,,
12
V_)
6.28329
x 0.0156.2832 (
H 0.31279 , 0.332584*
12
Checking critical point on top of the weld (pt. C)
$~ 0.6 ? 0.3114 H 0.07 H 0.06 0.4186 $m 1.0 ? 0.9405 H 0.10 0.1595 $ \0.4186 9 H 0.1595 9 0.448 Average shearing stress on the weld throat, vertically down:
20AP
Mo 288.14 0.7070.0156.2832
$V
,
x
Where T=FxL – Torsion-like couple on weld joint
r-radius from the joint centroid to the ith critical point of interest(perpendicular to rc and CW)
20AP400.448
1,077.6 M1 0.332584*
Resultant shearing stress is
M T~ \4,093.09 H 11,040.19 11,774.4 Tangential shearing force
M1 Adding Mo and M1 vectorially, the vertical and horizontal components of M1 are
0.1595
M1 1,077.6 3
6 383.7 0.448
0.4186
M1
1,077.6 3
6 1,006.9 0.448
Giving vertical and horizontal components of resultant shearing stress M as
Comparing
M 383.7 H 288.14 671.84 M
1,006.9 H 0 1,006.9 Appendix H12
M T~ \671.84 9 H 1,006.9 9 1,210.5 M T~ 1,210.5 MU 8,308.8 Choose minimum weld size 1/64 weld size. The actual weld bead will be 1/8 of an inch
because it would be easier to produce it.
FEA ANALYSIS OF THE ALUMINUM HOUSING FOR J2 LINK HOUSING
COSMOSXpress uses the maximum von Mises stress criterion to calculate the factor of safety
distribution. This criterion states that a ductile material starts to yield when the equivalent stress (von
Mises stress) reaches the yield strength of the material. The yield strength (SIGYLD) is defined as a
material property. COSMOSXpress calculates the factor of safety at a point by dividing the yield
strength by the equivalent stress at that point. Below picture is the von Mises stress distribution
with the applied load of 466 in-lb torque on the Pipe-Tee.
Based on specified parameters, the lowest factor of safety found in my design is 1.262
Picture of the areas of the Tee Pipe with a SF=1.262. The surfaces below SF of 1.25 are
shown in different colors.
Appendix H13
FEA ANALYSIS OF THE ALUMINUM HOUSING FOR J3 LINK HOUSING
For J3, the von Mises stress distribution is
Appendix H14
The surfaces below SF of 1.25 are shown in different colors.
Appendix H15
Appendix H16
Appendix H17
FEA ANALYSIS OF THE ALUMINUM HOUSING FOR J4 LINK HOUSING
Appendix H18
For J4, the von Mises stress distribution is
Appendix H19
FEA ANALYSIS OF THE ALUMINUM HOUSING FOR J5 LINK HOUSING
The surfaces below SF of 1.25 are shown in different colors.
Appendix H20
Appendix H21
Appendix H22
COMBINED LOADING ON AN ALUMINUM TEE AT J2 PITCH JOINT
<! 4.0,
<V 3.870,
0.065
100lb
20lb
200lb
3.5
B
Vz
A
N
D
2.0in
Mz
T
C
V
My
i$!9 ? $V9 3.141629 ? 1.9359 0.804 *
i
3.1416
4* ? 1.935* 3.111 *
x $!* ? $V* 2
2
i$!9 4$!
i$V9 4$V
(
,3 6 ? (
, 3 6 2
3i
2
3i
9
3.1416 2
4 2
3.1416 1.9359 4 1.935
(
,3
6?(
,3
6
2
3 3.1416
2
3 3.1416
0.503 *
x 3.111*
;~~ ; 1.556 *
2
2
∑ ~ 0: X ? 200AP 0 N X 200AP
∑ m 0: m ? 20AP 0 N m 20AP
∑ 0: ? 100AP 0 N 100AP
Appendix H23
∑ :~ 0: ? 100AP3.5 0 N 350 ? AP
∑ :m 0: :m H 100AP2 0 N :m ?200 ? AP
∑ : 0: : ? 20AP2 0 N : 40 ? AP
Magnitudes of produced stresses are listed below:
Normal axial stress produced by 200lb:
X
200AP
c) 248.8 0.8049
Normal stress produce by My:
:m + 200 ? AP 2
c9 257.1 1.556*
;
Normal stress produced by Mz:
: + 40 ? AP 2
cK 51.4 1.556*
;
Shearing stress by T:
+ 350 ? AP 2
225.0 M) 3.111*
x
Shearing stress by Vy:
m 20 ? AP 0.503K
M9 99.5
1.556* 0.065
;
Shearing stress by Vz:
100 ? AP 0.503K
MK 497.3
1.556* 0.065
;
Superposition
Axial and bending moments
At pt. A: c~ c) H c) 248.8 H ?257.1 ?8.3 =.$%=
At pt. D: c~ c) ? c) 248.8— ?257.1 505.9 %=
At pt. B: c~ c) ? cK 248.8— 51.4 197.4 At pt. C: c~ c) H cK 248.8 H 51.4 300.2 Shearing forces
At pt. A: M~m M) ? M9 225 ? 99.5 125.5 4
At pt. D: M~m M) H M9 225 H 99.5 324.5 4
At pt. B: M~m M) H MK 225 H 497.3 722.3 4
AT pt. C: M~m M) ? MK 225 ? 497.3 ?272.3 4
Principal stresses at each of the points:
At pt. A:
cn, n{
9
k
9
9
9 l H M~m
.Ka
9
k
.Ka 9
9
l H 125.59 ?4.15 125.6
cn 121.5 ; cn, ?129.8 Appendix H24
At pt. B:
cn, n{ At pt. C:
cn, n{ At pt. D:
cn, n{ MT~
9
k
9
)br.*a
k
k
9
Kaa.9a
k
k
9
`a`.ba
k
MT~
9
9
9
9 l H M~m
9
)br.*a 9
9
l H 722.39 98.7 729.0
cn 827.7 ; cn, ?630.3 cT~ ? cV8 cn ? cn{ 827.7 ? ?630.3
1458.0 2
2
2
9
9 l H M~m
9
Kaa.9a 9
9
l H ?272.39 150.1 310.9
cn 461.0 ; cn, ?160.8 cT~ ? cV8 cn ? cn{ 461.0 ? ?160.8
621.8 2
2
2
MT~
cT~ ? cV8 cn ? cn{ 121.5 ? ?129.8
125.7 2
2
2
9
9 l H M~m
9
`a`.ba 9
9
l H 324.59 253.0 411.4
cn 664.4 ; cn, ?158.4 cT~ ? cV8 cn ? cn{ 664.4 ? ?158.4
MT~ 411.4 2
2
2
Maximum stresses are at point B: cn 827.7 , MT~ 1458.0 BATTERY CALCULATIONS BY TORQUE CONSTANT METHOD
At pitch joint J2:
1. Required torque with 1.25 safety factor (S.F.)
578.07 ? AP
2. Gear ration 676: 1
3. Torque at the motor output
`r.ar V8W )
r
0.855 ? AP
4. Motor constant (see Table….) 1 4.278
!V8
p
5. Divide the torque at the motor by the motor’s torque constant to get the number of
amps for each motor
;
a.``V8W
z
*.9r
k )W l 3.198 )!
At pitch joint J3:
1. Required torque with 1.25 safety factor (S.F.)
266.06 ? AP
2. 676: 1
3. 9.a V8W )
r
0.394 ? AP )!
)W
6.297= ? Appendix H25
4. 1 2.748
5. ; !V8
.9br !V8
9.r*
z
p
2.292 At pitch joint J4:
1. Required torque with 1.25 safety factor (S.F.)
49.75 ? AP
2. 1093: 1
3. *b.r` V8W )
)abK
!V8
4. 1 2.309
5. ; a.r9 !V8
9.Kab
z
p
0.046 ? AP 0.315 )!
)W
0.728= ? At roll joint J5:
1. Required torque with 1.25 safety factor (S.F.)
25.00 ? AP
2. 850: 1
3. 9`.aa V8W )
`a
!V8
4. 1 2.139
5. ; a.*r) !V8
9.)Kb
z
p
0.029 ? AP 0.220 )!
)W
0.471 = ? Gripper:
Since the gripper will carry approximately the same weight as J5, the torque value is
assumed to be relatively the same 25.00 ? AP plus additional manufacturing
specification for current draw, which approximately 5A Therefore, it is safe to assume
; 6.0 Thus, total sum is
0 ; 3.198 H 2.292 H 0.315 H 0.220 H 6.0 12.025
Multiply the total number of amps required by the duration of the mission in minutes, and
divide by sixty to convert to hours. This calculation gives us a figure for amp-hours,
which is the unit of measure for battery capacity.
$
[ 9 . ? $
¡ 0 ; .% 12.025 45. 60.
¡ 0 ; .% N 3.3¡+@$$% P2%$D 12.025
3.3 . ? ¡=@$
0.27 ¡=@$ =$ 17 .
12.025 .
MAXIMUM ENCODER’S ANGULAR VELOCITY CALCULATION
Since all of the encoders will ride on the shaft of the motors, the maximum angular
velocity of the motor shaft has to be compared with the angular velocity of the encoder.
Appendix H26
The angular velocity of the encoder should not exceed the maximum no load velocity of
the motors.
For joints J2, J3, and J4, the HEDL 5540 optical relative position encoders are used.
Maximum operating frequencies for these encoders are 100 kHz (6). Thus for 500 count
per turn encoders
100,000 ¡ 60%+
'!1!¢ +=@ 1. 12,000.0 $.
500 @$
25@A2$ &%A=+D =C % .==$ '!1!¢ 3790, 5656, 2< 6800 $.
Thus, these encoders will not skip, providing a stream of binary signals to the controller.
For joint J5, MR Type M, 128-512 CTP encoder is used with a 320 KHz (6).
320,000 ¡ 60%+
'!1!¢ +=@ 1. 37,500.0 $.
512 @$
25@A2$ &%A=+D =C % .==$ 2 x5 '!1!¢ 7540 $.
Which satisfy the condition of not skipping the signal.
£ C) , 2A+2= $%¤ ^ C) ¥, 5%=.%$+2A $%¤ ^ C) :, .2%$2A $=%$%
MATERIAL SELECTION FOR HERO
Special Need
Strength-to-weight ratio
Stiffness
Performance Evaluation Index
Ultimate or yield strength/density
Modulus of elasticity
£ C) ^ C9 ¥ ^ CK :
An expression for the mass of the tube may be written as
i<!9 ? <V9 .
4
Where <! , <V -is tube is outside and inside diameter, and -is mass density of the material.
The diameter of the cross section must be large enough to carry the load F, without yielding,
and provide a design safety factor of U . Thus
m
i 9
9
U
<
4 ! ? <V
Combining last two equations
. U ( ,
m
Therefore, the material-based performance index for the tubing is
CK : D
For the tubing to be stiff enough to safely carry the load without excessive elastic deformation and to
provide a safety factor U . The tubing should carry the load F, without exceeding the critical
elastic deformation,∆§¢V1 , and provide a design factor U
∆+$
¨ (
,
i 9
<
<! ? <V9 4
Appendix H27
Where ¨ is axial strain. Combining
. U 3 6 and
h
© {
«U Uz{ ¬
ª
¨ k
∆+$
<
l to get
. U 9 k l
CK′ : D
Appendix H28
APPENDIX-I DRAWINGS
SHOULDER JOINT-J2
Appendix I1
Appendix I2
Appendix I3
Appendix I4
Appendix I5
Appendix I6
Appendix I7
Appendix I8
ELBOW JOINT-J3
Appendix I9
Appendix I10
Appendix I11
Appendix I12
Appendix I13
Appendix I14
Appendix I15
Appendix I16
WRIST JOINT-J4
Appendix I17
Appendix I18
Appendix I19
Appendix I20
Appendix I21
ROLL JOINT-J5
Appendix I22
Appendix I23
Appendix I24
Appendix I25
COMPLETE ARM ASSEMBLY
Appendix I26
Appendix I27