Resource and Energy Economics 20 Ž1997. 27–50
Marketable pollution permits with uncertainty
and transaction costs
Juan-Pablo Montero
)
School of Engineering, Catholic UniÕersity of Chile, Casilla 306, Correo 22, Santiago, Chile
Received 26 December 1995; accepted 23 November 1996
Abstract
Increasing interest in the use of marketable permits for pollution control has become
evident in recent years. Concern regarding their performance still remains because empirical
evidence has shown transaction costs and uncertainty to be significant in past and existing
marketable permits programs. In this paper we develop theoretical and numerical models
that include transaction costs and uncertainty Žin trade approval. to show their effects on
market performance Ži.e., equilibrium price of permits and trading volume. and aggregate
control costs. We also show that in the presence of transaction costs and uncertainty the
initial allocation of permits may not be neutral in terms of efficiency. Furthermore, using a
numerical model for a hypothetical NO x trading program in which participants have
discrete control technology choices, we find that aggregate control costs and the equilibrium
price of permits are sensitive to the initial allocation of permits, even for constant marginal
transaction costs and certainty. q 1997 Elsevier Science B.V.
JEL classification: Q25; Q28; D23
Keywords: Pollution control; Marketable permits; Uncertainty; Transaction costs
)
Present address: Massachusetts Institute of Technology, 1 Amherst St., Room E40-280, Cambridge, MA 02139, USA. Phone 617-253-7519; fax 617-253-9845; e-mail jpmonter@mit.edu
0928-7655r97r$17.00 q 1997 Elsevier Science B.V. All rights reserved.
PII S 0 9 2 8 - 7 6 5 5 Ž 9 7 . 0 0 0 1 0 - 9
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
28
1. Introduction
Increasing interest in the use of marketable permits for pollution control has
become evident in recent years. 1 Transaction costs and market and regulatory
uncertainty, however – mainly the result of regulatory restrictions and administrative requirements – have been shown to be very important in explaining the
performance of marketable permit programs implemented in the USA in recent
years. With few exceptions, current theoretical models partially describe the
performance of such markets for pollution control. 2 This paper incorporates
transaction costs and uncertainty into theoretical and numerical models of marketable permits to Ž1. study their effect on market performance Ži.e., equilibrium
price of permits and trading volume. and aggregate control cost; and Ž2. estimate
the effects of initial allocation of permits on the final equilibrium.
Much of the literature on permits for pollution control focuses on estimates of
the potential costs savings of using this regulatory approach over the traditional
command-and-control approach. We find several empirical studies showing large
potential savings from the use of marketable permits in both water and air
pollution control programs Že.g., Tietenberg, 1985; Eheart et al., 1987.. These
studies suggest that normally the command-and-control policy allocates the control
responsibility in a way that causes the control costs to rise unnecessarily.
However, as the evidence shows ŽHahn, 1989; Hahn and Hester, 1989a., it would
be a mistake to take these estimates of potential cost savings as the real savings of
any emissions trading program to be implemented by the regulatory authority. A
more realistic comparison would be between actual command-and-control policies
and either existing trading programs or reasonably constrained theoretical marketable permit models ŽHahn and Stavins, 1992..
The main reason why actual cost savings are likely to differ from estimates of
potential costs savings is that perfect market assumptions rarely hold in practice.
Standard marketable permits models Žbased on Montgomery, 1972. usually assume that there are frictionless markets, a significant number of profit-maximizing
agents where no participant can exercise market power, stable prices, frequent
transactions, and perfect monitoring and enforcement. Empirical evidence, however, shows cases where trades are less than frequent and sometimes negotiated on
a case-by-case basis ŽAtkinson and Tietenberg, 1991., markets are concentrated
ŽO’Neil, 1983., and cases where regulatory restrictions and administrative requirements are significant ŽHahn and Hester, 1989b., resulting in high transaction costs
1
This became evident with the introduction of the SO 2 emissions trading program under Title IV of
the 1990 Clean Air Act Amendments. For more details, see Montero et al. Ž1996..
2
Conventional models can be found in Montgomery Ž1972., Tietenberg Ž1985. and Baumol and
Oates Ž1988..
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
29
and uncertainty about whether a trade would be allowed. Thus, experience from
emission trading programs suggest the need for further analysis that can illustrate
the effects of transaction costs and uncertainty on market performance.
There has been some recent work addressing the effect of transaction costs and
trading restrictions on the performance of markets for pollution control. 3 For
instance, Winebrake et al. Ž1995. study the impacts of regulatory and legislative
intervention on the aggregate control costs and allowance Žpermit. prices in the
SO 2 emissions trading program under Title IV. However, they do not consider
transaction costs, rather restrictions on market participation. Stavins Ž1995., on the
other hand, provides a theoretical framework to include transaction costs in a
model of marketable permits. He uses general transaction cost curves and continuous marginal control cost curves to show how transaction costs reduce trading
levels and increase abatement costs and how the initial allocation of permits can
matter in terms of efficiency. This framework, however, does not allow us to
visualize how significant Žas opposed to incremental. changes in transaction costs,
uncertainty and the initial allocation of permits affect the equilibrium price, trading
volume and aggregate control costs, and especially if emitting sources have
discrete control technology choices rather than continuous marginal cost curves.
As we shall see using a numerical model, with discontinuous marginal cost curves,
aggregate control costs and the equilibrium price of permits are sensitive to the
initial allocation of permits, even for constant marginal transaction costs and
certainty.
This paper extends Stavins’ Ž1995. work by incorporating uncertainty and also
by allowing marginal control cost curves to be discontinuous. In the next section
of the paper we analyze in more detail the empirical evidence. In section 3, we
present a one-period theoretical model for a market with a large number of
profit-maximizing agents, where the price of permits remains unchanged, nobody
exercises market power and perfect monitoring and enforcement are available for
the environmental regulator. With that and penalties large enough, we rule out the
possibility of non-compliance. In this section, we also include an analysis of the
effects of the initial distribution of permits on the final outcome. In section 4, we
develop a general equilibrium, numerical model for a hypothetical NO x trading
system. There are 611 coal-fired generating units for which there are discrete
control technology options rather than continuous marginal control cost curves.
We show the effects of transaction costs and uncertainty on aggregate control
costs, equilibrium price and trading volume for different aggregate emission
targets and initial allocations. Concluding remarks are in section 5.
3
The effects of uncertainty in trading approval are also found in markets for water transfers as
explained by Lund Ž1993..
30
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
2. Marketable permits in practice
Provided that agents willing to trade have to enter the market, find one another,
communicate Žnegotiate price and quantity., and sign the corresponding legal
contract, some level of transaction costs is always likely to exist – as in any
market transaction. However, there is sufficient empirical evidence suggesting
both that transaction costs are unusually high in some marketable permits programs, and that trading approval is by no means certain. 4 For instance, despite
significant pollution control cost savings, the first piece of evidence is found in the
EPA’s emissions trading program for criteria air pollutants. Hahn and Hester
Ž1989b. point out that there was no ready means for buyers and sellers to identify
each other, that it was not unusual for buyers to pay fees of several thousand
dollars assistance in searching for offsets, and that regulatory approval for bubbles
was very costly and lengthy. Furthermore, many proposals for bubble transactions
did not materialize even before the formal review process. 5 In this program firms
also faced considerable uncertainty in anticipating how regulators would determine
their baseline emission levels and emission reductions for emissions trading
purposes. In making an external trade firms face even greater uncertainty about
these calculations and consequently about the feasibility of the trade. Because
firms value certainty when considering major investments, they are likely to find
internal trading advantageous, even if emission credits might be acquired at a
lower cost through an external trade ŽHahn and Hester, 1989b.. Another source of
uncertainty about the realization of the trade comes from the fact that even when
the regulatory approval is likely, there may be court challenges by third parties
based mainly on environmental impacts. In fact, Hahn Ž1989. suggests that in the
EPA’s emission trading program environmentalists have made trading even more
uncertain.
The Fox River water-pollutant trading program in Wisconsin also provides
clear evidence of numerous administrative requirements and related transaction
costs and uncertainty ŽHahn and Hester, 1989a.. For example, discharge permits
for both parties in the trade must be first modified to get the approval, which can
take at least six months, and approval must be obtained before the trade takes
place. The administrative approval process is also complicated by the fact that the
pollution problem is not limited to the trading pollutant Žoxygen-demanding
material., but includes toxic organic compounds from paper mill effluents. Some
proposed trades might have led to high local concentrations of toxic pollutants and
may not have passed administrative review ŽEPA, 1992..
4
There are some exceptions like the lead phasedown program, which has been described as the
closest to an economist’s ideal of freely functioning markets ŽHahn, 1989..
5
Barry Elman, personal communication, July 1996.
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
31
As suggested by GAO Ž1994. and Rose Ž1994., among others, transaction costs
have also been present in the SO 2 emissions trading program; 6 although we do
not know with certainty yet to what extent. In sum, there is clear evidence of the
presence of transaction costs andror uncertainty in past and existing markets. 7
Because these factors are likely to be present to some extent in future trading
programs, especially those involving non-uniformly mixed pollutants, 8 it is
important to understand their implications on market performance in order to
judge and evaluate such programs accordingly.
3. A theoretical model
Dales Ž1968. was the first to propose the idea of using marketable permits to
distribute the pollution-reduction burden among firms in a cost-effective manner.
As pointed out by Coase Ž1960., clearly defined property rights and costless
bargaining should lead to the cost-effective or least-cost equilibrium, in which all
sources reduce pollution at the same marginal cost. Hereafter we will refer to this
equilibrium as the least-cost equilibrium. Throughout this section we will show
that because of transaction costs and uncertainty there will be a new equilibrium,
in which aggregate control costs are higher compared to the least-cost equilibrium.
The new equilibrium will still be cost-effective, however, provided that expected
aggregate costs are lower compared to an equivalent emission standards approach.
We carry out our analysis from the perspective of a buyer of permits. 9 Seeking
marketable permits as a way to comply with emission standards will depend on the
amount of savings from using such an alternative and the likelihood of obtaining
the corresponding trading approval. We use a one-period model to analyze the
compliance investment decision faced by an affected source, which is reduced to
the level of emissions reduction Žvia control technology. and the amount of
permits to be traded.
We divide our analysis in this section into three parts. In subsection 3.1,
without specifying whether marginal control cost functions are continuous or
discontinuous, we fix the amount of permits to be traded and analyze whether a
firm is likely to pursue the trading option. In subsection 3.2, we calculate the
optimal level of trading Žpermits to purchase. for general transaction costs and
6
Transaction costs in the SO 2 emissions trading program would also include uncertainty about the
rate-making treatment of allowances Žpermits. by the Public Utility Commissions ŽPUCs.. This is
totally different from the uncertainty that we are trying to model in this paper, which is about whether a
particular trade would be allowed by the environmental agency.
7
Uncertainty here may also include program uncertainty about whether a particular trading program
will be maintained in the future so trading would be still feasible.
8
See Nichols and Farr Ž1995. for a discussion on NO x trading proposals to reduce ozone.
9
The analysis can easily be extended to a seller of permits.
32
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
probability of approval functions, and continuous marginal control cost curves.
Note that in the presence of fixed transaction costs the latter level would remain as
the optimal level of trading as long as the firm would opt for the trading option
given that level; otherwise no trading would be optimal. Finally, in subsection 3.3,
we analyze the effect of the initial allocation of permits on the final equilibrium
for continuous functions.
3.1. A simple model of trading Õersus no-trading
Consider a large number of sources subject to an environmental regulation to
control a flow pollutant, say, nitrogen oxides ŽNO x ., under which each source
receives an initial amount of pollution permits. Permits allow a certain emission
rate Že.g., tons of NO x per year., they are freely distributed by the authority and
can be exchanged. To comply with the regulations the ith firm will control
pollution such that emissions are equal to the initial amount of permits plus
Žminus. a given amount of permits bought Žsold., therefore:
u i y ri s q0 i q x i
Ž 1.
where u i is the steady-state emission rate that would prevail if the source does not
control any pollution at all Žwe refer to this level as the unrestricted emission rate.,
ri is the amount of emissions reduction, q0 i is the initial amount of permits, and
x i is a given amount of permits to be purchased by source i. 10
To see whether trading is more economical, the firm considers the total cost of
compliance given by the pollution abatement costs, the cost of purchasing permits,
and transaction costs. All costs in this paper are assumed to be in present value
terms. Capital and operational costs of pollution abatement are assumed to be
certain at the time of the investment decision and equal to CA Žfor simplicity index
i referring to an individual source is omitted hereafter.. The abatement costs, CA ,
will depend on the amount of emissions reduction, that is, CA s CAŽ r ., which is
increasing in r. The cost of purchasing permits is CP s CP Ž x . s px, where p is
the unit price, which is assumed constant. 11 At this point, the regulated firm faces
two compliance options, the first of which is to disregard trading and to control
emissions at a rate equal to u y q0 with a total cost equal to CA s CAŽ r s u y q0 ..
The second option is to buy ‘‘ x’’ amount of permits and to control at a lower
level. The second option, however, is uncertain. The probability that a trade
attempt will be approved and the individual source will be able to obtain the
requisite amount of permits is denoted by f .
10
Following the taxonomy of Tietenberg Ž1985. and Stavins Ž1995., we are considering an emission
permit that gives any holder the same emission privileges and transfers are done on a one-for-one basis.
11
Here p is assumed to be exogenous when in practice it depends on the level of transaction costs
and uncertainty. It also may vary endogenously as the market evolves. We treat p as an endogenous
variable in section 4.
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
33
Seeking permits to comply will then be subject not only to the probability of
approval, f , but also to those costs associated with the exchange of any property
right – the transaction costs. The transaction costs of any potential exchange of
permits subject to regulatory approval can be divided into two parts: Ž1. transaction costs to obtain the trade approval, T1; and Ž2. additional transaction costs
borne after the approval and required to complete the trade, T2 . Transaction costs
T1 would include the expected value of the resources spent in the form of
technical, administrative and legal work associated with the approval processes.
Much of the bargaining, searching and information expenditures may be included
in T1 as well. Transaction costs T2 , borne when the regulatory approval is
obtained, would include some additional technical work, possibly some price
negotiation among parties and the legal work required to complete the trade.
Although in some cases there may be a subtle distinction between the nature of T1
and T2 , there is a clear distinction about the economic return. If the trade is
rejected, the return from T1 is zero.
If x amount of permits is attempted and successfully obtained, the total cost of
compliance Žin present value terms. is given by CAŽ r s u y q0 y x. q CP Ž x . q T1
q T2 , where r is given by eq. Ž1.. Hereafter we will use r to refer to u y q0 y x.
If the attempted trade fails, however, the total cost of compliance is given by
CAŽ u y q0 . q T1. The choice of whether or not to rely on the trading option is
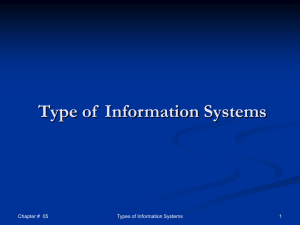
illustrated by the decision tree in Fig. 1. According to Fig. 1, the compliance
investment decision is reduced to two alternatives. The cost of the first alternative,
the one that relies on trading, is given by
E w TCT x s f P Ž CA Ž r . q CP Ž x . q T1 q T2 . q Ž 1 y f . P Ž CA Ž u y q0 . q T1 .
Ž 2.
where Ew TCT x is the total expected cost of emission reduction when trading is
considered. It is worth mentioning that this alternative is economically rational as
long as CAŽ r . q CP Ž x . - CAŽ u y q0 .. The latter condition simply implies that in
Fig. 1. Compliance decision for a given level of trading.
34
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
the absence of transaction costs, the trading option would be pursued only if there
are some savings DC s CAŽ u y q0 . y CAŽ r . y CP Ž x . greater than zero. On the
other hand, the total cost of the second alternative, the one that does not rely on
trading, is given by
TCN T s CA Ž u y q0 .
Ž 3.
where TCN T is total cost of compliance with no-trading. A risk-neutral agent will
consider the trading option as long as Ew TCT x - TCN T .
Expected total cost savings from trading are expressed by the difference
between Ž2. and Ž3.. If we subtract these expressions, rearrange terms and use the
fact that DC s CAŽ u y q0 . y CAŽ r . y CP Ž x ., we obtain
TCN T y E w TCT x s f P Ž DC y T2 . y T1
Ž 4.
which represents the expected total costs savings under conditions of uncertainty
and transaction costs. If eq. Ž4. is equal to zero, a risk-neutral agent will be
indifferent between the two options. An indifference curve, then, can be established by setting Ž4. equal to zero, which yields
T1
D C s q T2
Ž 5.
f
Eq. Ž5. shows the importance of the probability of success in the trading approval
process, f , and the distribution of transaction costs before and after the approval
ŽT1 and T2 respectively. from the perspective of any potential buyer of permits.
Indeed, uncertainty and transaction costs can reduce potential savings DC to a
point where the trading option is no longer attractive.
A numerical example gives us a better understanding of the investment decision
situation. Consider potential savings Žin absence of transaction costs. DC s 100,
and probability of success f s 0.5. Additionally assume that only 20% of
potential savings will be spent on transaction costs after the approval ŽT2 s 20..
Under these circumstances a risk-neutral rational agent would be willing to spend
at most 40% of the savings in transaction costs associated with the approval
ŽT1 s 40.. Under conditions of certainty, conversely, the same agent would be
willing to pay up to 80% of the potential savings.
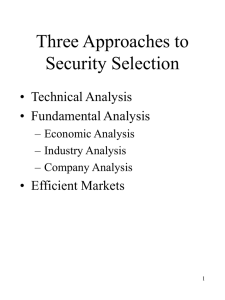
Fig. 2 also illustrates the effects of uncertainty and transaction costs. Provided
that T1 and T2 are the transaction costs for a given x, we can draw the
indifference curve T1rf q T2 as a function of f . Additionally we can draw DC s
DC Ž x ., the savings level for a given amount of trading x in the absence of
transaction costs. Thus, any potential trading opportunity x that yields savings DC
greater than T1 q T2 is pursued as long as f ) f 0 , where f 0 s T1rŽ DC y T2 ..
Note that in absence of uncertainty all trading opportunities would be pursued Žthis
need not always be the case.. In summary, the amount of trading opportunities is
depressed because of transaction costs and uncertainty, and therefore the least-cost
solution is no longer the final equilibrium. The divergence from the least-cost
equilibrium, however, has to be estimated empirically on a case-by-case basis.
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
35
Fig. 2. Expected cost savings from trading.
While the above analysis helps to decide whether or not buying a certain
amount x of permits would be a more economical option in expected value terms,
we are more interested in estimating what is the optimal amount of trading x ) , if
any, that would be pursued by a risk-neutral agent. As we shall see in section 4,
when control technology choices are discrete and marginal cost functions are
discontinuous we have to use the above analysis and by ‘‘trial and error’’ obtain
the optimal amount of trading and pollution control for each source. If marginal
control cost curves are continuous and differentiable, we can extend the previous
analysis and obtain an analytical expression for x ) . We turn to that now.
3.2. Optimal amount of trading
In the preceding analysis we did not specify how the probability of success, f ,
is formed. In reality, it may vary with the amount of effort agents devote to
making the trading successful and the amount of permits to be traded. For
example, a low amount of permits being exchanged in a system where location of
trading partners does not considerably affect the configuration of critical points
Žhot spots. is more likely to succeed. Eheart et al. Ž1987. suggest that the trading
approval process could be formalized by approving only those trades whenever the
buyer Žor seller. could demonstrate that no new violation of the Žwater. quality
standard would occur. The amount of technical work that this requires is obviously
part of T1. Additionally, to make the approval more likely, an agent may be
willing to compensate third parties Žincreasing T1 . for some indirect effects
associated with the trade. Therefore, we assume f to be a function of the amount
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
36
of permits to be exchanged, x, and the amount of effort spent by an agent during
the trading approval process, e. 12 The Žunknown. function f s f Ž x, e . is
assumed to be continuous throughout the domains of its variables, twice-differentiable respect to x and e, where f e ) 0 and f x - 0.
Regarding the functional form of transaction costs, there is evidence suggesting
that their magnitude depends on the amount of permits exchanged. 13 We assume
that T1 and T2 are increasing functions of x Žalthough part of T1 and T2 may be
fixed.. We also will assume that the effort e is costly and linear in T1 such that
ET1rEe s 1. 14
We proceed now to determine the optimal amount of trading and effort for an
individual source that faces uncertainty and transaction costs. Provided that
trading is now part of the investment decision, we can substitute f s f Ž x, e .
and T1 s T1Ž x, e . into eq. Ž2. and obtain
E w TCT x s f Ž x ,e . P CA Ž r . q CP Ž x . q T1 Ž x ,e . q T2 Ž x . 4
q Ž 1 y f Ž x ,e . . P CA Ž u y q0 . q T1 Ž x ,e . 4
Ž 6.
where Ew TCT x is again the expected total cost with trading, and x and e are
decision variables. While effort e affects only f , the amount of trading x affects
CA , CP , T1 , T2 , and f . Recall that now CAŽ r . is assumed to be a twice-differentiable, convex and increasing function. Note also that because eq. Ž1. always must
hold and u and q0 are constant terms, we can set CA as a function of either r or
x. Minimizing Ew TCT x by setting the derivatives with respect to x and e equal to
zero, we obtain
EE w TCT x
Ex
s 0s f x P CA Ž x . q CP Ž x . q T2 Ž x . y CA Ž u y q0 . 4
qfP
½
E CA Ž x .
Ex
qpq
E T2
Ex
5
q
E T1
Ex
Ž 7.
and
EE w TCT x
Ee
s 0 s f e P C A Ž x . q C P Ž x . q T2 Ž x . y C A Ž u y q 0 . 4 q 1
Ž 8.
Rearranging terms and dividing Ž7. by Ž8. leads to
E CA Ž x .
Ex
qpq
E T2
Ex
q
E T1 1
Ex f
s
fx
ff e
Ž 9.
12
Since there will be fixed transaction costs, we assume that it is unprofitable to divide up each trade
in many pieces to make it certain.
X
Y
13
Stavins Ž1995. defines a common transaction costs function, T Ž x ., for which T Ž x . ) 0, and T Ž x .
may be positive, negative or zero-valued.
14
We can then write T1 s eqfŽ x .. Note that convexity in effort does not change the main results.
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
37
and we know by the chain rule and Ž1. that in the case of a buyer or permits we
have
E CA Ž P .
E CA Ž P . E x
E CA Ž P .
s
sy
Ž 10 .
Er
Ex
Er
Ex
where r is the amount of pollution reduced. Substituting Ž10. into Ž9. we finally
obtain an expression to calculate the optimal amount of emission reduction and the
optimal amount of trading, r ) and x ) respectively,
E CA Ž r ) .
Er
spq
E T2
Ex
q
E T1 1
Ex f
y
fx
ff e
Ž 11 .
From eqs. Ž1., either Ž7. or Ž8., and Ž11., we have the complete solution to our
problem, that is, the optimal values for the amount of trading x ) , emission
reduction r ) , and effort e ) . Where functional forms are known, we could find
optimal values x ) , r ) and e ) ; transaction costs levels T1Ž x ) ,e ) . and T2 Ž x ) .;
and probability level f Ž x ) ,e ) .. Using the approach developed in section 3.1 we
can see whether trading still remains optimal. From Fig. 2, we know that as long
as DC Ž x ) . ) T1Ž x ) ,e ) . q T2 Ž x ) . and f Ž x ) ,e ) . ) f 0 Ž x ) ,e ) ., trading x )
permits would be, in expected value terms, the most economical alternative to
comply; otherwise no-trading would be the optimal choice.
Provided that trading is pursued, eq. Ž11. shows that instead of the least-cost
equilibrium, agents would control pollution at a marginal cost equal to the ‘‘sum’’
of permit prices, marginal transaction costs and a risk component. The total cost of
pollution control would be the sum of capital and operational costs, transaction
costs, and the amount of permits purchased. Finally, uncertainty has an indirect
effect on the total cost of control by affecting the level of pollution control r.
In order to better understand the implications of eq. Ž11., it is useful to show
two particular cases. First, if f is exogenous to the agent such that f s g ,
independent of e and x, eq. Ž11. reduces to
E CA Ž r ) .
Er
spq
E T2
Ex
q
E T1 1
Ex g
Ž 12 .
which is obtained simply by minimizing Ž6. with respect to x. 15 Second, if agents
are always certain about the approval, that is, f s 1, eq. Ž11. reduces to
E CA Ž r ) .
E TT
Ž 13 .
Er
Ex
where TT s T1 q T2 are total transaction costs. From eq. Ž13. we can see that in
the presence of transaction costs, the least-cost solution will not be achieved unless
transaction costs are independent of the amount of permits being exchanged, in
which case we need to check eq. Ž5.. As a result, we obtain a new equilibrium in
15
spq
Setting the derivative of Ž6. with respect to e always yields zero when f is exogenous.
38
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
which marginal control costs are different across sources. In particular, potential
buyers will control at a higher marginal cost than potential sellers. It is clear that if
marginal transaction costs associated with the trade are positive, the purchaser of
permits will choose more pollution reduction r and lower number of permits x.
This comes from assuming marginal pollution control costs increasing in r.
Now, returning to eq. Ž12. we find that under non-zero marginal transaction
costs uncertainty makes the new equilibrium lie further away from the least-cost
solution. Because f - 1 the level of emission reduction will be even higher and
the amount of trading lower compared to the situation depicted by eq. Ž13..
Finally, by looking at eq. Ž11., it seems that the distance from the least-cost
solution is even larger because the last term on the right-hand side is negative
Ž f x - 0 and f e ) 0.. Given the fact that now the outcome can be affected by
spending more effort, this last term would seem to lead to counter-intuitive effects,
that is, a higher rate of emission control and lower level of trading. However, the
presence of this last term has ambiguous effects on the level of control r. It is not
difficult to show that the optimal level of control r could be the same, higher or
lower than in Ž12., but always greater than in Ž13.. The ambiguity comes from the
fact that agents can control the amount of effort e making the approval more or
less likely and the fact that changes in e or x affect f differently. The agents’
optimal behavior will ultimately depend upon the functional forms assumed for
f Ž x,e ., T1Ž x,e ., and T2 Ž x ..
We have shown that transaction costs and uncertainty do affect the amount of
emission control and thereby aggregate control cost. We see from eq. Ž11. that
optimal control levels are higher for all sources compared to the least-cost
equilibrium, and so are the aggregate control costs. A marketable permits program
with transaction costs and uncertainty can still be said to be cost-effective in that
Žexpected. aggregate control costs are not higher than in an equivalent emissions
standard approach Ži.e., same initial allocation of permits and standards..
3.3. The effects of the initial allocation of permits on the final equilibrium
Here we illustrate the effects of the initial allocation on the equilibrium for
continuous marginal control cost functions. We can think of an economy with two
emitting sources Ž i and j . that are restricted to an aggregate level of emissions of
a certain pollutant. We let the first source be a potential buyer of permits Žhigh
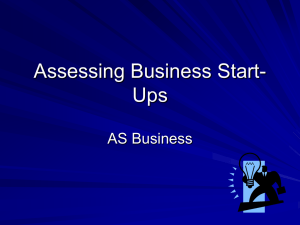
marginal cost polluter. and the second, a potential seller. Fig. 3 depicts the
situation. The diagram is arbitrarily drawn such that the origin of the marginal cost
of control for the first source Ž MCi . is to the left of the left-hand axis and the
origin of the marginal cost of control for the second source Ž MC j . is to the right of
the right-hand axis Žnote that the marginal costs of control for either source need
not be zero at the unrestricted level of emissions u.. Total emissions are restricted
to an aggregate quantity of qt o t s q0 i q q0 j units Že.g., tons of NO x per year.,
where the pair Ž q0 i , q0 j . is some initial allocation. So drawn, the diagram gives all
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
39
Fig. 3. Initial allocation and post-trading equilibrium.
possible allocations of the total qt o t units of emissions between the two sources. In
the same figure we show that under transaction costs and uncertainty an initial
allocation of permits Ž q0 i , q0 j . would yield an equilibrium such as Ž qi) , q j) . rather
than the least-cost solution Ž qil c, q jl c .. The difference between the marginal cost of
control between the two sources Ždistance between points I and H. represents the
total transaction costs augmented by uncertainty, and area HIJ represents the
forgone aggregate pollution control savings. The new equilibrium price of permits
may also be different from the least-cost price p l c – it will ultimately depend on
how transaction costs are distributed among buyers and sellers.
It is worth emphasizing that ex post a system of marketable permits with
transaction costs and uncertainty would yield lower aggregate control costs than an
equivalent emissions standard approach as long as the area FGIH is greater than
the cost of transactions that did not materialize. On grounds of efficiency
Žaggregate control cost minimization., a question that immediately follows is
whether choosing a different initial allocation would make the new equilibrium lie
closer to the least-cost solution Žpoint J.. In fact, Stavins Ž1995. shows that under
increasing Ždecreasing. marginal transaction costs, an initial allocation closer
Žfurther. to Žfrom. point J would yield lower aggregate costs. We now extend his
result to a more general situation. 16
16
We proceed with our analysis knowing that information about control costs Žand transaction costs
and uncertainty. is rarely available to the regulators to establish a priori which allocation is best from
an efficiency standpoint. In reality, uncertainty and transaction costs become evident once the program
is in place.
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
40
We carry out a comparative static analysis for source i and see under what
conditions the equilibrium solution ri given by eq. Ž11. is affected by a small
change in the initial allocation q0 i . Taking the total derivative of both sides of eq.
Ž11. with respect to the primary variables ri and q0 i , gives
E 2 CA i Ž ri .
Eri2
dri s
E 2 T2 E x i
E x i2
y
Eq0 i
dq0 i q
E 2 T1 1 E x i
E x i2
f Eq0 i
dq0 i y
ff e f x x y ff x f e x y f x2f e E x i
Ž ff e .
2
Eq0 i
ET1 f x E x i
E x i f 2 Eq0 i
dq0 i
dq0 i
Ž 14 .
We know from eq. Ž1. that E x irEq0 i s y1, so substituting that into Ž14. and
rearranging terms we can rewrite eq. Ž14. as
dri
dq0 i
s
ž
E 2 CA i Ž ri .
q
Eri2
y1
/ ž
y
E 2 T2
E x i2
y
E 2 T1 1
E x i2
ff e f x x y ff x f e x y f x2f e
Ž ff e .
2
/
f
q
ET1 f x
E xi f 2
Ž 15 .
Since E 2 CA i Ž ri .rEri2 is positive, by the usual convexity properties of control
cost curves, the sign of d rird q0 i is determined by the value of the expression in
the second parentheses of the right-hand side, which depends on six terms. The
first two terms are either negative, zero or positive depending on whether marginal
transaction costs are decreasing, constant or increasing; and the third and sixth
terms are always negative. The fourth and fifth terms are, in general, positive and
negative, respectively. 17
To verify how the equilibrium solution ri is affected by a small change in the
initial allocation of permits q0 i , it is useful to start with a simpler situation. If f is
either exogenous or equal to one Ži.e., the second parentheses of eq. Ž15. reduces
to the first two terms. uncertainty does not change Stavins’ Ž1995. results and
therefore d rird q0 i is equal to zero only with constant marginal transaction costs.
For example, decreasing marginal transaction costs ŽT Y Ž x . - 0. implies that the
equilibrium would be closer to the least-cost solution when the buyer receives a
lower amount of permits Ži.e., pair Ž q0 i , q0 j . somewhat further from J in Fig. 3..
What may appear to be counter-intuitive is simply the result of assumed economies
of scale in trading and the fact that the probability of approval is invariant to the
trading volume and the amount of effort. Conversely, if marginal transaction costs
are increasing, d rird q0 i would turn out to be negative.
17
It is the case if we assume a Cobb–Douglas function with diminishing returns Ž f s Ae a Ž B y x . b,
where 0 - a , b -1, B y x ) 0, A) 0 and such that 0 F f F1;e, x in the relevant range..
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
41
When f is endogenous to the investment compliance decision, however, we
find that d rird q0 i is more likely to be negative, even with decreasing marginal
transaction costs. First, under increasing marginal transaction costs, all terms but
one of the second parentheses in eq. Ž15. are negative. Then d rird q0 i is more
likely to be negative, which implies that an initial allocation further away from the
least-cost equilibrium increases the departure of the post-trading equilibrium
outcome from the least-cost equilibrium. In other words, if the initial allocation
Ž q0 i , q0 j . of Fig. 3 is moved to the left, the new equilibrium would lie to the left
of the original equilibrium Ž qi) , q j) ..
When marginal transaction costs are constant, d rird q0 i is not necessarily zero
but more likely to be negative since three terms are negative and only one is
positive in the second parentheses of eq. Ž15.. Finally when marginal transaction
costs are decreasing, d rird q0 i may still be negative since half of the terms in eq.
Ž15. are negative. Despite scale economies, if larger trades are less likely to obtain
approval, an initial allocation closer to the least-cost equilibrium can still shift the
post-trading equilibrium closer to the least-cost equilibrium.
Where functional forms for f , T1 , and T2 are not specified it is difficult to
estimate the net effect of a change in the initial allocation of permits on the
post-trading equilibrium. We can say that because of uncertainty the initial
distribution of permits is likely to matter not only in terms of equity but also in
terms of efficiency. Furthermore, because larger trades may be less likely to obtain
regulatory approval, an allocation closer to the least-cost equilibrium is always
desirable.
4. A numerical model
The theoretical results above indicate that transaction costs and uncertainty
have implications on trading volume and aggregate control costs, and that the
initial allocation of permits can matter in terms of efficiency. However, theoretical
models do not enable us to study how the market equilibrium for permits is
achieved or the sensitivity of such equilibrium to changes in transaction costs and
uncertainty – especially if there are several participants and marginal control cost
curves are discontinuous. Furthermore, using theoretical models we can not
consider impacts of significant Žas opposed to incremental. changes in the initial
allocation of permits. Thus, in this section we develop a numerical model that
simulates a hypothetical nitrogen oxides ŽNO x . emissions trading program for 611
coal-fired generating units, in which one permit conveys the right to emit 1 ton of
NO x in one year.
4.1. The data
The control cost data used in our model was obtained from EPA’s Air and
Energy Engineering Research Laboratory, Research Triangle Park ŽEPA, 1991.
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
42
Table 1
Statistics of the sample: 611 coal-fired generating unitsa
Variables
Total
Mean
Std. Dev.
Generating capacity ŽMW.
1990 NO x emissions Žtons.
1990 heat input Ž10 12 Btu.
1990 emission rates ŽlbsrmmBtu.
EPA’s proposed rate limit ŽlbrmmBtu.
188,463
4,090,739
9,463
313
6,695
15.5
0.89
0.51
251
6,598
13.9
0.35
0.19
Min.
LNB technologies b
MC EX ANTE
VC
Max. removal capacity Ž r LN B . in %
454
169
36
633
260
13
27
4
14
8259
1522
69
SCR technologies
MC EX ANTE
VC
Max. removal capacity Ž r SC R . in %
3,302
1,567
80
2,842
1,256
0
710
374
80
70,955
29,092
80
22
2
0.0
0.46
0.29
Max.
1300
39,015
81.4
2.04
0.94
a
When applied, values are in 1988 dollars.
Includes only 513 units.
Source: EPA Ž1991., Pechan Ž1993, 1995..
b
and the NO x emissions data were obtained from EPA’s Acid Rain Office ŽPechan,
1993, 1995.. Additional information on unit characteristics such as size, heat
input, and boiler configuration is in Pechan Ž1995.. Our sample includes 611
coal-fired generating units. In order to reduce NO x emissions, firms can either
install Ž1. low-NO x combustion burner ŽLNB. technologies that eliminate 20–60%
of NOx emissions, or Ž2. selective catalytic reduction ŽSCR. technologies that
eliminate about 80% of emissions. These technologies involve a large one-time
installation cost and a rather low operating cost. There are 97 units for which there
is only one control technology available, which is SCR. 18
Main statistics of the 611 units can be found in Table 1. In general, units are
very heterogeneous in terms of size, emissions and control costs, which can imply
a large potential for control cost saving under a trading approach. It is important to
notice the difference in cost between the first ŽLNB. and the second technology
ŽSCR.. This immediately suggests that a command-and-control policy requiring,
for instance, a 50% reduction to all units can be substantially more expensive than
a trading approach achieving the same aggregate reduction.
We use several emission targets and initial permits allocations throughout our
simulations. For presentation purposes we include only two scenarios. The first
emission target is equal to 59% of 1990 NO x emissions, which is based on EPA’s
proposed rule for NO x reduction in Phase II of Title IV. We use this permit
18
See EPA Ž1991. for technical details.
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
43
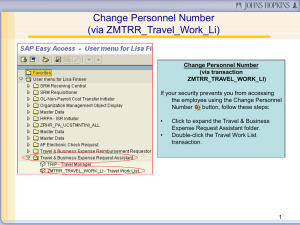
Fig. 4. NO x compliance options and costs.
allocation because is not uniform across units but it based on the unit’s boiler type
Žsee Table 1.. The second emission target is equal to 80% of 1990 NO x emissions.
Here, we assume a uniform permit allocation, so that each unit receives permits
equal to 80% of their 1990 NO x emissions.
4.2. The model
The numerical model has the following elements and assumptions. Firms’ NO x
control technologies are discrete, which implies that marginal control curves are
discontinuous rather than continuous, as usually modeled. Fig. 4 illustrates the
NO x control choices of a typical coal-fired unit and the corresponding annual
marginal costs ŽMC.. 19 MC E-A is the ex ante marginal cost, that is, before the
control technology is installed; and VC is the variable cost. 20 The first portion of
the MC E-A ŽVC. curve corresponds to the LNB technology and the second to the
SCR technology. The maximum removal capacity of these technologies are rL N B
and rSC R , for LNB and SCR respectively. The LNB’s Žannualized. installation
cost is the integral of MC E-A between zero and rL N B minus rL N B P VCL N B , while
the SCR’s Žannualized. installation cost is the area under MC E-A between zero and
rSC R minus rSC R P VCSC R . Finally, unrestricted emissions are denoted by u.
19
20
One-time installing costs are annualized using 10.3% charge ŽEPA, 1991..
Note that VC need not be convex.
44
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
Based upon the Žexpected. price of permits p and the amount of permits issued
to a particular coal-fired unit q0 , the unit’s owner must decide about the type of
technology to install and the NO x control level r. As shown in Fig. 4, for
example, if approval is certain and there is no transaction costs, the owner will
install the LNB technology, control emissions up to the maximum removal
capacity rL N B , and sell and amount of permits equal to rL N B y r 0 .
As described earlier, a firm i pursuing trading faces transaction costs and
uncertainty about the approval, which we model using the following simple
forms: 21
T1 i s a q b 1 x i
T2 i s b 2 x i a,b 1 ,b 2 ) 0
fi s f , 0 - f F 1
Ž 16 .
where x i is the Žabsolute. size of the trade. We assume that transaction costs and
uncertainty affect sellers and buyers indistinctly and we do not distinguish
between inter- and intra-company trading. 22 Now, if trading approval is not
certain and transaction costs are significant enough, the owner of the unit in Fig. 4
will still install the same technology, but will control r 0 tons of NO x and sell no
permits. Because control technologies and control levels are discrete variables, we
use the approach developed in section 3.1 to model the cost minimization problem
faced by the owner of each unit.
Finally, to compute the equilibrium of the permits market, we assume that each
individual minimizes expected costs subject to his or her technology choices,
endowments and the expected price of permits. Each individual has complete
information about other participants’ control costs and endowments. Since there is
a large number of participants, the expected and ex post price of permits, amount
of trading, and aggregate control costs are virtually the same Žlaw of large
numbers.. The requirements of a general equilibrium are that the demand and
supply of permits be equal and that the total emissions be no larger than the
emission target. Solving the model involves finding an equilibrium price p for
permits. 23 The equilibrium price of permits determines each of the control
strategies chosen by each firm, the total amount of trading and the aggregate
control costs. Note that this equilibrium assumes that all trade takes place
simultaneously, when in reality it may take place sequentially over time, and
frequently as a consequence of information disclosures Že.g., price information..
21
More elaborated forms were used Že.g., f s f Ž x ., and Ti Ž x . s aq bx q cx 2 . with no change in
the main results.
22
This latter will certainly overstate the effect of uncertainty and transaction costs, but by not much
if units within the same company have similar marginal control costs.
23
Quasi-convexity of Žex ante. marginal cost curves assures existence and uniqueness of the
equilibrium.
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
45
Table 2
Numerical results for a hypothetical NO x emissions trading programa
Emissions target
Parameters
Žmm tons.rinstrument a
b1
b2
f
Ž$.
Ž$rton. Ž$rton.
Results Žexpected values.
p
TCCsb TRCsb Trading volumeb
Ž$rton. Žmm$. Žmm$. Ž=10 3 .
2.40rCAC
2.40rMPs
2.40rMPs
2.40rMPs
2.40rMPs
2.40rMPs
2.40rMPs
2.40rMPs
2.40rMPs
3.22rCAC
3.22rMPs
3.22rMPs
3.22rMPs
3.22rMPs
n.a.
1375
1366
1366
1372
1681
2750
1550
1863
n.a.
600
584
566
519
n.a.
0
1000
1000
1000
1000
1000
5000
5000
n.a.
0
0
0
0
n.a.
0
200
200
200
200
200
400
600
n.a.
0
100
100
100
n.a.
0
200
200
200
200
200
400
600
n.a.
0
100
100
100
n.a.
1.00
1.00
0.75
0.50
0.25
0.10
1.00
1.00
n.a.
1.00
1.00
0.75
0.50
3851
902
1220
1913
2609
3304
3704
1517
1792
1422
164
298
594
889
3851
902
914
1647
2381
3133
3612
934
1019
1422
164
176
491
804
n.a.
818
755
566
371
166
35
724
642
n.a.
705
606
436
286
a
When applied, values are in 1988 dollars.
Values for total compliance costs ŽTCCs., total removal costs ŽTRCs., and trading volume are per
year.
b
4.3. The numerical results
Results of numerical simulations of the performance of marketable permits
ŽMPs. for different parameter values and emission targets are presented in Table 2.
In each case, we include the Žexpected. values for: Ž1. the equilibrium price Ž p .;
Ž2. total compliance costs ŽTCCs., which include transaction costs T1 and T2 ; Ž3.
total removal costs ŽTRCs., 24 which do not include transaction costs; and Ž4.
trading volume. For each emission target we also include the total removal costs of
an equivalent command-and-control ŽCAC. policy Ži.e., emissions standards..
The main results can be summarized as follows. First, because Žex ante.
marginal control costs curves are convex, the cost of compliance of either the
CAC or MPs approach rises more than linearly with the emission reduction target.
For instance, a 21% increase in reduction Ž3.22 to 2.40 million tons per year.
raises the cost of an MPs approach Žin the absence of uncertainty and transaction
costs. by more than five times. In addition, due to high one-time installation costs,
TRCs under CAC are substantially higher than TRCs under MPs, which shows the
large potential for control cost savings from trading.
24
We use removal cost instead of control costs to differentiate from compliance costs.
46
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
The effects of transaction costs and uncertainty are obvious: trade volume
decreases, and TCCs and TRCs increase. It is important to notice that uncertainty
tends to have a much more adverse effect on trading than transaction costs. In fact,
for an NO x emission target of 2.40 million tons, total marginal transaction costs of
about 30–50% of the market price of permits, and f s 1, the effect on trading
volume is modest: no more than 12% reduction. However, for f s 0.75 and
marginal transaction costs of about 30% of the permits price, trading volume
reduces by 30%. The same results are obtained for the 3.22 million tons emissions
target, in that uncertainty has a much more adverse effect on trading, TCCs and
TRCs. The fact that transaction costs and uncertainty reduce trading and increase
TCCs and TRCs does not imply that an MPs program is not cost-effective. Table 2
shows that even for significant levels of transaction costs and uncertainty, an MPs
approach can provide substantial savings.
Finally, the effects of uncertainty and transaction costs on the market price of
permits p seem to be less significant, even for large values of T1 and T2 , and low
values of f . The main reason is that transaction costs and uncertainty affect
buyers and sellers indistinctly, so the supply and demand for permits are similarly
affected. If transaction costs and uncertainty affect only the buyers Žsellers., the
demand Žsupply. for permits would decrease and p would decrease Žincrease..
Our numerical results indicate that after a certain Žhigh. level of transaction costs
and uncertainty, however, we find that p rises steadily Žsee Table 2.. The reasons
is that at a very high level of transaction costs and uncertainty the only remaining
buyers and sellers are those with very high and very low marginal costs of
compliance respectively. Because the aggregate marginal cost curve is convex,
when the reduction target is not too high Žlike the one in Table 2. the seller must
be compensated with a higher price in order to sell. Note that if the emissions
reduction requirement is very high the price may even drop for a significant fall in
f and an increase in T1 and T2 .
4.4. The effects of the initial allocation of permits on market performance
When marginal transaction costs and the probability of approval are constant,
eq. Ž15. tells us that the initial allocation of permits does not affect the final
control configuration, which in our case would imply that TRCs do not change.
Using an arbitrary initial allocation further away from the least-cost equilibrium,
we show that the above is not necessarily true in the presence of discrete control
choices. In Table 3, we present the results for the 3.22 million tons emissions
target. As we can see from the case where a s b 1 s b 2 s 0 and f s 1, the new
initial allocation is further away from the least-cost equilibrium, since more
trading is required to achieve the least-cost equilibrium.
We first find that in the presence of transaction costs only Ž a s 0, b 1 s b 2 s 100,
and f s 1., TRCs are 6% larger than that corresponding to the uniform initial
allocation of Table 2, which indicates that the initial allocation matters in terms of
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
47
Table 3
Numerical results for a different initial allocation of permitsa
Emissions target
Parameters
Žmm tons.rinstrument a
b1
b2
f
Ž$. Ž$rton. Ž$rton.
Results Žexpected values.
p
TCCsb TRCsb Trading volumeb
Ž$rton. Žmm$. Žmm$. Ž=10 3 .
3.22rCAC
3.22rMPs
3.22rMPs
3.22rMPs
3.22rMPs
n.a.
600
538
513
477
n.a.
0
0
0
0
n.a.
0
100
100
100
n.a.
0
100
100
100
n.a.
1.00
1.00
0.75
0.50
1801
164
413
789
1163
1801
164
186
592
999
n.a.
1374
1138
842
547
a
When applied, values are in 1988 dollars.
Values for total compliance costs ŽTCCs., total removal costs ŽTRCs., and trading volume are per
year.
b
efficiency even with constant marginal transaction costs. As we incorporate
uncertainty, we see that the effects are more significant. For instance, when a s 0,
b 1 s b 2 s 100, and f s 0.5, TRCs are 24% higher compare to the uniform
allocation of Table 2. The reason is that unit owners have discrete control choices,
so that the presence of transaction costs Žand uncertainty. can affect the control
technology choice Že.g., SCR instead of LNB. for a particular unit if the initial
allocation is changed. Based on this and other simulation results, we conclude that
in the presence of discrete control choices and uncertainty an initial allocation
closer to the least-cost solution is always preferred in terms of efficiency Ži.e.,
minimization of TRCs.. 25
Finally, we find that the market equilibrium price of permits is sensitive to the
initial allocation as well. Results in Table 3 indicate that equilibrium prices are
about 8–9% lower compared to prices in Table 2.
5. Conclusions
It is now widely accepted that marketable permit programs for environmental
protection have the potential to attain the same environmental quality at lower
aggregate costs. Because of high transaction costs and uncertainty on trade
approval, which are primarily the result of extensive regulatory restrictions and
administrative requirements, it would be a mistake to assume that the post-trading
outcome would be the least-cost equilibrium and to take potential cost savings as
25
We also tried decreasing marginal transaction costs Že.g., T Ž x . s aq bx y cx 2 ., but because of
uncertainty we always reached the same conclusion, that an allocation closer to the least-cost solution
was preferred in terms of efficiency.
48
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
the real savings that would be achieved by an emissions trading program implemented in place of a more traditional command-and-control approach. A more
realistic comparison of aggregate control costs would be between actual command-and-control policies and either existing trading programs or reasonably
constrained theoretical marketable permit models such as the one presented here.
This paper incorporates transaction costs and uncertainty into theoretical and
numerical models of marketable permits to Ž1. study their effect on market
performance Ži.e., equilibrium price of permits and trading volume. and aggregate
control cost; and Ž2. estimate the effects of initial allocation of permits on the final
equilibrium.
Not surprisingly, we first show that transaction costs and uncertainty reduce the
overall welfare of the system by absorbing resources directly Žtransaction costs T1
and T2 . and by suppressing exchanges that otherwise would have been mutually
beneficial. However, a numerical model shows that even for high levels of
transaction costs and uncertainty, a marketable permit system is still cost-effective,
since Žexpected. aggregate control costs are always substantially lower compared
to an equivalent command-and-control approach. We also find that because
transaction costs and uncertainty affect buyers and seller indistinctly, the equilibrium price of permits tend to be stable around the ‘‘perfect market price’’ for an
ample range of T1 , T2 and f .
When the initial allocation of permits is close to the least-cost equilibrium, the
reduction of overall welfare is minimal. Yet the initial allocation of any property
rights such as pollution permits is always subject to informational and political
constraints. In this paper, we also show that in the presence of uncertainty andror
discrete emissions control choices the initial distribution of permits matters not
only in terms of equity but also in terms of efficiency. Furthermore, because larger
trades may be less likely to obtain regulatory approval, we find that an allocation
closer to the least-cost equilibrium is always desirable. Finally, we find that the
market equilibrium price of permits is also sensitive to the initial allocation, even
for constant marginal transaction costs and certainty.
The design for an effective emissions trading program is an empirical matter.
The choice of a permit program is by no means unique. The magnitude and nature
of transaction costs and uncertainty are likely to differ from case to case. As we
move from simpler permit designs, based on inputs and emissions, towards more
sophisticated ones, based on ambient concentrations and risk exposure, it is more
likely to have greater public costs associated with monitoring and enforcement and
a larger number of regulatory restriction and administrative requirements. More
sophisticated approaches may allow for more control over violation of standards,
but they also involve higher transaction costs and uncertainty. In short, there is no
simple answer. Regardless of the program design, a general suggestion for
reducing transaction costs and uncertainty and hence lowering aggregate control
costs would always be to keep detailed administrative procedures at the minimum
possible and to establish firm regulatory and legal guidelines.
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
49
Acknowledgements
I am grateful to Paul Joskow, Richard Schmalensee, Robert Stavins and three
anonymous referees for helpful comments on previous drafts, and especially to A.
Denny Ellerman for numerous comments and discussions on the subject. Financial
support from the MIT Center for Energy and Environmental Policy Research is
also gratefully acknowledged. No need to mention that all remaining errors are my
own.
References
Atkinson, S.E., Tietenberg, T., 1991. Market failure in incentive-based regulation: the case of
emissions trading. Journal of Environmental Economics and Management 21, 17–31.
Baumol, W.J., Oates, W.E., 1988, The Theory of Environmental Policy, 3rd ed. Cambridge University
Press, Cambridge, UK.
Coase, R.H., 1960. The problem of social cost. Journal of Law and Economics 3, 1–44.
Dales, J., 1968. Pollution, Property, Prices. University Press, Toronto.
Eheart, J.W., Brill, E.D., Jr., Lence, B.J., Kilgore, J.D., Uber, J.G., 1987. Cost efficiency of
time-varying discharge permit programs for water quality management. Water Resources Research
23, 245–251.
Hahn, R.W., 1989. Economic prescriptions for environmental problems: how the patient followed the
doctor’s orders. Journal of Economic Perspectives 3, 95–114.
Hahn, R.W., Hester, G.L., 1989a. Marketable permits: lessons for theory and practice. Ecology Law
Quarterly 16, 361–406.
Hahn, R.W., Hester, G.L., 1989b. Where did all markets go? An analysis of EPA’s emissions trading
program. Yale Journal on Regulation 6, 109–153.
Hahn, R.W., Stavins, R.N., 1992. Economics incentives for environmental protection: integrating
theory and practice. American Economic Review 82, 464–468.
Lund, J.R., 1993. Transaction risk versus transaction costs in water transfers. Water Resources
Research 29, 3103–3107.
Montero, J.P., Ellerman, A.D., Schmalensee, R., 1996. The US allowance trading program for sulfur
dioxide: an update after the first year of compliance. Proceedings of the Second Workshop in
Energy Externalities. European Commission DG-XII, Brussels, September.
Montgomery, W.D., 1972. Markets in licenses and efficient pollution control programs. Journal of
Economic Theory 5, 395–418.
Nichols, A., Farr, J., 1995. The timing of NOx emissions and emissions trading in the ozone transport
region. National Economic Research Associates, research project 3835, Cambridge, MA.
O’Neil, W.B., 1983. The regulation of water pollution permit trading under conditions of varying
streamflow and temperature. In: Joeres, E.F., David, M.H. ŽEds.., Buying a Better Environment:
Cost-effective Regulation Through Permit Trading. University of Wisconsin Press, Madison, WI.
Pechan, 1993. The national allowance data base version 2.11: technical support document, prepared by
E.H. Pechan Associates for the US Environmental Protection Agency’s Office of Atmospheric
Programs – Acid Rain Division, Washington, DC.
Pechan, 1995. The acid rain data base version 1 ŽARDBV1., prepared by E.H. Pechan Associates for
the US Environmental Protection Agency’s Office of Atmospheric Programs – Acid Rain Division,
Contract no. 68-D3-0005, Washington, DC.
Rose, K., 1994. The SO 2 emissions trading program: events and lessons so far. PUR Utility Weekly
ŽFourth Quarter Supplement., 1–8.
50
J.-P. Monteror Resource and Energy Economics 20 (1997) 27–50
Stavins, R., 1995. Transaction costs and tradeable permits. Journal of Environmental Economics and
Management 29, 133–148.
Tietenberg, T.H., 1985. Emissions trading: an exercise in reforming pollution policy. Resources for the
Future, Washington, DC.
US Environmental Protection Agency ŽEPA., 1991. Retrofit costs for SO 2 and NOx control options at
200 coal-fired plants. Report EPAr600rS7-90r021, Research Triangle Park, NC.
US Environmental Protection Agency ŽEPA., 1992. Incentive analysis for Clean Water Act Reauthorization: point sourcernonpoint source trading for nutrient discharge reductions. Report 68-C0-0083,
Washington, DC.
US General Accounting Office ŽGAO., 1994. Air pollution: allowance trading offers an opportunity to
reduce emissions at less cost. GAOrRCED-95-30, Washington, DC.
Winebrake, J.J., Farrell, A.E., Bernstein, M.A., 1995. The Clean Air Act’s sulfur dioxide emissions
market: estimating the costs of regulatory and legislative intervention. Resource and Energy
Economics 17, 239–260.