design criteria for weather routed transport 1.1 background
advertisement

DESIGN CRITERIA FOR WEATHER ROUTED TRANSPORT
A.B. Aalbers (Maritime Research Institute Netherlands, MAR1N),
R. Nataraja (Noble Denton Europe Ltd.),
S. Anink (Dockwise Transport B.V.)
SUMMARY
The paper describes the advanced design process for weather routed heavy cargo transports which is now possible
using the Safetrans PC software tooi. The software tooi, devised as a risk based, probabilistic response method for
the calculation of the design loads for ocean transports and tows has been subjected to a thorough calibration and
validation.
To qualify as an engineering method, a load factor study was carried out to estabÜsh partial safety factors as
function of probability of failure. The target level of safety (i.e. upper level of acceptable probability of failure)
depends on the type of transport and has been identified in a consequence class evaluation. This allows the user to
select the appropriate safety factors for design. An engineering guideline has been developed to instruct the engineer
as to selection of targets and proper use of the method.
The paper reveals the various specific capabilities of Safetrans and presents a sample case of results, illustrating the
effect of weather routing.
1.
1NTRODUCTION
capabilities.
1.1
BACKGROUND
Safetrans is the only design tooi available to model
weather routed transports and offshore operations with
weather windows. The system uses a historie weather
database that includes the weather forecast. Hence, the
simulated transport will not leave when bad weather is
predicted or will go around bad weather or go for safe
haven. For weather-routed trips the maximum allowable condition such as leg bending moment, cribbing
pressure etc. is known in advance. From that, a limit
sea state can be derived.
The Safetrans software tooi has been developed in
1998-2001 in a Joint Industry Project with Oil Companies (11), Heavy lift transport and towing cöntractors
(7), Warranty surveyors (4), Class Societies (2),
Drilling cöntractors (2) and Engineering companies (6).
The co-operation in this broad field of interest and
ski lis ensured tight control of the enabling technologies
for the risk based, probabilistic design methodology:
MetOcean physics
Risk Analysis
Ship hydrodynamics
Long term statistical evaluation techniques
Ship routing logies & experience
The completion of the software was presented to the
public in September 2001 at the City University JackUp Conference [1].
Since then, the User Group has taken over
responsibility for further development and user support
of the software. A major part of this development work
is the Engineering Guideline and Load Factor study
presented in this paper.
1.2
SUMMARY DESCRIPTION SAFETRANS
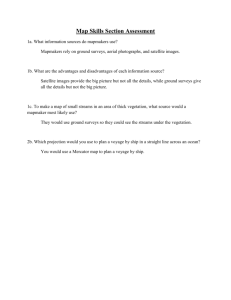
The Safetrans software tooi is a Monte-Carlo
Simulation method: a randomly repeated weather
routed voyage simulation. From the departure location
to the destination the voyage is simulated in 3 hr time
steps. In each step the ship 'master' (Captain's Decision
Mi mie) decides how to proceed, based on forthcoming
information on weather forecast, sea piloting area,
actual and forecasted ship behaviour and on ship
Figure I: Safetrans Monte Carlo process
The simulations start at random departure dates, chosen
in the season of interest. During the trip, the response to
each sea state is taken into account to obtain a long
term distribution of the vessel response over the
voyage. By repeating this exercise sufficiently many
times, the ensemble long-term distribution of the
motions is obtained, which can be used for design. The
Monte Carlo Simulation method allows the user to
determine the operational criterions under which the
transport can be carried out to an acceptable risk or
delay. Presence of tropical cyclones is taken into account, and if a simulation accidentally hits a tropical
cyclone the simulation time step is reduced to 1 hr in
order to account for the rapidly changing weather
conditions.
Compared to conventtonal design methods, using
design waves and assumed worst heading scenarios the
Safetrans method is distinctive in the foliowing:
ADVANTAGES;
Swell, wind force and waves combinations are
correctly modeled and included in e.g. load
calculations.
Bad weather avoidance and bad weather tactics are
modeled, ensuring realistic vessel heading with
respect to the environment
Short trip scenarios with use of favourable weather
windows can be modeled.
Offshore operations with installation criterions can
be modeled. (Float Over)
Failure risk assessment is possible, allo wing the
user to design to a pre-defined reliability goal.
Realistic estimate of voyage duration is possible
A quantitative risk analysis (economie, personnel
and environmental) is carried out.
Fatigue analyses are possible on basis of the logged
calculation results.
DIS ADVANTAGES:
More operational and technical knowledge
required to understand the calculations
More time consuming than design wave method
1.3
1.3.a
is
the structural capacity of the cargo, others from
operational considerations like clearance of
overhanging cargo, t h e wave height and wind speed
criteria are default requirements, and additionally the
tow force criterion for tows. A total of eight criteria
may be specified.
The criterion input is in the form of an 'operational
criterion value' and a 'safety factor', see Fig. 2.
KUnBQXD!££flfl~
Ofcrin
*dM
-1
£(mttfrf«ja
te W|
nraUcm roü <XG )dtq{T
• aata nottan VX frifl
wjtton pltoA 015 tcfajjl
pffll
•UtffFnJu
Ml
41.1
6.1
t l . Il
s.nf
ï.a
l.S
1.3
1.5
Bm.» 1 Bit
Figure 2: Criteria input
Additionally, criteria that define when the CDM has
to consider change of power & heading for comfort
can also be given.
The operational value is the value that the CDM has to
try to avoid by re-routing, sheltering and changes of
course and speed for comfort.
The safety factor is used to determine the maximum
acceptable value for cargo, sea-fastening-or ship.- If
this value is exceeded the MCS risk analysis will
assume that the probability of damage is orders of
magnitude larger than otherwise.
The operational values are used to calculate a
weighted "ship status variable" upon which the CDM
reacts. The operational criteria for motions, etc.
depend on cargo and ship limitations. It is advisable to
make a consistent set. For example, for roll and pitch:
criteria for both are listed because these motions are
sea direction dependent and roll is generally low when
pitch is large and vice versa. Both criteria have to be
consistent with the wave height criterion, which can
be achieved by using motion database results as
sketched below.
DESIGN USE
Criteria
The Safetrans software is focused on a probabilistic
design format instead of the prescriptive, simplified
format commonly used for design of marine operations.
Even the new ISO code (ISO 19901-6, 2004) is based
on prescriptive values of motion responses and
allowable friction coefficients etc.
A probabilistic, risk based method needs criteria which
define what a transport can safely accept and thereupon
compute the risk. Additionally, the Captain's Decision
Mimic needs criterion input to safely 'steer' the vessel
over the seas. Some of these criteria are derived from
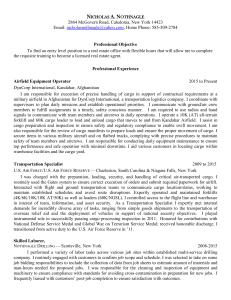
Roll criterion in Scatter diagram
Figure 3: Wave height criterion and motions can be
related as shown
The values of the criteria have to be realistic. For
example, it is not advised to try to cross the North
Atlantic Ocean on a northerly great circle route with an
operational criterion for the significant wave height of
only 3.5 m. In winter half year the vessel will not be
able to properly re-route and extreme voyage durations
will result: actually the method will generally make the
vessel wait until summer.
1.3.b
Risk
The risk calculation is accumulated over the 3 hrs
time step process. In each time step the actual
conditions, e.g. waves, wind, vessel motions, tow
forces, etc derived from the MetOcean database are
accounted. The table below reviews the risk
calculation.
Tabte 1: Risk
Hazard
(Initial event)
Capsize
Conditional
Collision *)
Fire/Explosion *)
Foundering
Historie
Historie
Conditional
Grounding
(powered)
Ship stability
failure
Machinery
Failure *)
LossofControl *)
Conditional
Structural Failure
Sea Fastening
Failure
Conditional
Conditional
Towline
Breakage *)
Conditional
Towline Fouled
*)
Other events
*) Secondary
grounding
*)Delay due to
Historie
drift
1.3.c
Historie
Historie
Event count
Evaluation in Risk module
Description
The historie capsize probability is enhanced by a factor 10J when
the Capsize Risk Decision Variable (DV) exceeds a criterion
value. This DV is large when e.g. resonant roll occurs and/or
when relative motions at the side exceed the freeboard.
The historie average collision probability is used
The historie fire/explosion probability is used
The historie foundering probability is enhanced by a factor 10J
when the "Green water on deck" Decision Variable exceeds a
criterion value. This DV is large when relative motions at the bow
and the sides exceed the freeboard.
The historie grounding probability is enhanced by a factor 10 if
the vessel is close to the shore (< 1 nm)
The historie probability of a ship loosing ïts stability due to a
damage (leak) or shifted cargo is used
The historie machinery failure probability is used
Count of the number of times that the tow line maximum force in
a 3 hr MC simulation step exceeded the break strength.
The historie structural failure probability is enhanced by a factor
5.102.(R)2 for R>0.5. The value of R is the average ration of SDA
value of the criterion signals and the design limits (which are
given by operational criterion times safety factor).
The historie tow line breaking probability is enhanced by a factor
103 when the 'Tow line break risk" Decision Variable exceeds a
criterion value. This DV is large when the most probable maximum tow line forces exceed the operational criterion times the
safety factor (= tow line break load).
The historie tow line fouling probability is used
Historie
The historie probability is used
Both these secondary hazards are computed on basis of historie average recovery
times for the given initial events (or tug assistance if the vessel is incapabie of self
recovery) and the drift time to down-wind shore (using wind speed, vessel drag
and distance)
10 Voyage return value for design
The computed results of risk, ship motions, most
probable maximum values in each time step, are
logged. For design purposes it is necessary to carry out
multiple voyage simulations (typically >200, but 250 in
the Load Factor study). The software carries out an
ensemble analysis for multiple voyages, in which the
results are statistically evaluated to obtain the 10voyage return values.
In a sensitivity study on the various possibilities for
ensemble long term statistical evaluation, it was
shown that the P90 value, i.e. the 90% nonexceedance value of the individual voyage's Long
Term Most Probable Maximum values, was the most
adequate definition of the characteristic value for
design of weather routed transport and hence 10voyage return values. The definition is considered
consistent with experience in transport history.
1.4
ENGINEERING GUIDELINE
FACTOR STUDY
&
LOAD
In 1999, a load factor study was carried out for the
statistical design calculation process denoted Voyage
Acceleration Climate (V.A.C.). This study is referred to
as the 'First Load Factor study' carried out in the
Safetrans TOW JIP [1,2]. The V.A.C, or renamed
Voyage Motion Climate method (VMC) in Safetrans is
based on probabilistic, response based statistics for the
motions on a route, given the scatter diagrams for sea
climate. The method has upon completion of the load
factor study been accepted as engineering method for
(heavy lift) sea transport. The present load factor study
and the resulting engineering guideline enhance the
present knowledge and is expected attain industry
acceptance for future designs.
The safety level implied by using a probabilistic
method like Safetrans depends on the definition of the
characteristic values and safety factors. The
Engineering Guideline & Load Factor Study has been
carried out to obtain a proper definition for the
characteristic values and to establish the safety factors
to be applied. In particular it is crucial how the load
effects on cargo and sea-fastening are defined in view
of the period (of the voyage) that is considered. The
definition of the P90 value, together with the systematic
uncertainty analysis for the calculation method and
environmental data has determined the bias of the load
effects.
A particular issue to consider in this context is the
structural interaction between the cargo and the vessel when it is significantly large (e.g. a production
platform). This interaction depends upon the relative
stiffness of the cargo and vessel and on friction effects
in the cribbing layer between the ship and cargo.
To ensure a consistent definition of 'characteristic
values', i.e. the above mentioned P90 value, the
calculations with Safetrans should be carried out
properly. To that purpose an engineering guideline
has been developed which instructs the user to
correctly model the voyage in Safetrans.
For the definition of the safety factors, which have to
be applied to the P90 characteristic values to obtain
the design values, a partial safety factor calibration
study ('load factor study') was carried out. The load
factor study is described in the next section. In the sea
fastening example, it comprised systematic uncertainty analysis and takes into account friction in the
cribbing. The elastic properties and layout of the
cribbing are assumed to un-couple the structural
stiffness of cargo and ship. The load factor study
resulted in safety factors as a function of probabiHty
of failure. A consequence class assessment was
carried out to define for which types of transport
which level of failure probabiHty would be acceptable.
2.
SAFETRANS PARTIAL SAFETV
FACTOR CALIBRATION
2,1
CASES
.
. -
The partial safety factor calibration study has been
carried out by Noble Denton Europe with input from
heavy lift transport contractors and Load Factor Study
Working Group. Table 2 shows the study cases which
were made available. A selection was made on basis
of comparability with and availability of original
design data and relevant signal analysis results.
Table 2: Transports evaluated for Load Factor study
Case
VESSEL
START PORT
CARGO
END PORT
1
Transshelf
Galaxy II
Singapore
Hal i fax
2
Blue Marlin
Glomar Adriatic
Camel on
Alexandria
3
Mega Marlin
Thunderhorse Semi
Korea
Gulf of Mexico
4*
Jumbo Spirit
400 t Columns
Japan
Persian Gulf
5**
Giant Barge
Bridge Girders
Cadiz
Malmo
6
Happy Buccaneer
10001 Ship Loader
Brisbane
Dalrymple Bay
7***
Boa Barge 10
Maersk Rig 62
Brownsville
Maracaibo
8
Tai An Kou
Sea Star
Singapore
Corpus Christi
*
**
***
Not included in calibration - small cargo
Not included in calibration - CG accelerations not supplied
Not included in calibration - Original design forces not supplied.
The selected cases had the following propeities and actual (historie) design values:
Table 3: Transport data
2.2
(0
Design
Force
(kN)
Yield
Stress
(MPa)
Cargo
Value
<M$)
Mass
Selected Cases
Transshei f/Gal axy
24040
44204
235
10-100
Blue Marlin/Adriatic
Tai An Kou/SeaStar
Mega Marlin/Thunder Horse
10261
235
5839
60000
41975
33347
147150
235
235
10-100
10-100
Buccaneer/lOOt Ship Loader
1030
4345
235
LOAD FACTOR STUDY: BACKGROUND
The cases are evaluated based on total transverse
load, represented by the transverse wind load plus
the inertia force due to the transverse acceleration
at the centre of gravity of the cargo. When this load
(Ddemand) exceeds resistance (combined effect of
sea fastening (Fdeslg^ and friction), that will lead to
total failure (G4>) where the G is the failure
function, also called the "G function":
G = | k.Fdes(gn +C/. M.g\-
The code calibration (systematic accuracy analysis)
is based on results from the first load factor study
for VMC as well as the new results from an investigation of the weather databases and statistical
reliability of multiple voyage simulations [3, 4]
c)
This leads to a consistent set of Type I (basic
physical) and Type II (model ing) accuracy
distribution functions,
The failure function can then be described as:
G = VnvF}a„0Jy
Figure 4: cribbing friction distribution
Ddemam/
b)
e)
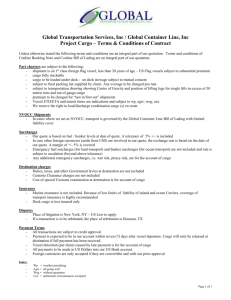
From the histogram of Most Probable Maximum
values for the voyage (an example is given in Fig.
5) the P50 and P90 values are derived, which two
values are sufficiënt to fit a 2-parameter Gumbel
asymptotic function to the tail of the histogram.
The mean and Standard deviation of this Gumbel
function is used in the Load Factor evaluation.
So, a realistic probability that higher loads than
the P90 occur is taken into account in the
calculation of failure probability.
+lfCrr]cMg\-r]cT]mTis7]hD
in which the Type II uncertainties (normal distri butions) are given by the following bias and
Coëfficiënt of Variations:
r)w:
Welding uncertainties
u = 0.8, C o V = 2 0 %
T)f:
Friction (factor) uncertainties
H=1.73,CoV=29%
nc.
Mass uncertainties (lognormal)
>i=1.05,CoV = 5 %
lm, tls, T|h- Analysis uncertainties
li=1.0, 1.0, 1.1
CoV= 5%, 5%, 10%
d)
100-400
consistent with the practice of e.g. heavy
transport operator Dockwise. Note that the
accuracy distribution applied on it (see Figure 4)
results in a 95% probability that the friction is
between 11% and 41%.
A simplified overview of the methodology for code
calibration and assessment of optimised partial load
factors is given because the theory and methodology is
quite complex. The following aspects are important:
a)
>400
An average friction coëfficiënt of 0.15 for the
cribbing was used. This is conservative but
30
25
/
|20
l 15
10
/
n
1
1 2 3 *
s
N
II
II
n
TT ftn.
5 6 7 8 9 10 11 12 13 W 15 16 17 18 19 20 21 22 23 24
Amplitude
Figure 5: Histogram of Most
Maximum values of Multiple MCS
Probable
With all the accuracy distribution functions in
place, the probabiHty of failure can be computed
for a given safety factor k, with F(tefiff, S( Ddemand FfHojonJ/k. This is done by the software package
COMREL [5]. A 3rd order function was fltted
through the numerical results yielding p = f(k),
with P being the safety index.
If OK, these partial load factors could be considered
as optimised and be used in other transport designs.
Fig. 7 shows that good consistency was obtained: the
revised reliability spreads only lightly around the
target value of 2.942, which was the historie average
of the 5 selected transport cases.
Bata va Factor ol l a f a l y
r
*!
• g . B t l B l ' . l . f l I i ' * 1.417». * I.MIZ
R'"1
^ — —
Avaraga
^ — P o l y . (Avaraoa)
^*>*~~^
^ ^
O.S
1
1.1
2
1S
Faclor ef Safaty
Figure 7: After calibration and optimization
the revised reliabilities show little spread
Figure 6: Fit function for safety index
Then, as shown in the equation below, partial load
factors YR, YD and YF were attributed to FdMign,
Ddemand & n d
^resistance'^design —"•0 / dcmand - ^' — ?fric«ion '*-f
' ^
'S)
A sensitivity study showed that Yfnctioo could be
fixed to a value of 0.7, leaving only two partial
safety factors to be evaluated
As a result, p becomes a function of k which
depends on YR and YD^
Note: of the 5 cases considered, 2 were very heavy lift
cargoes and 3 were lighter in comparison. Initially,
some concern was present whether these cases could
be compared, but in the evaluation of partial load
factors the consistency of the results was quite good
and there was no systematic difference between the 3
Üghter and 2 heavy cargoes.
The following overall result was obtained:
k = (-CfM.g + yD.D)/yR. Fdeslgn
o
Hence, for a given YR and YD it is possible to calculate p. Hence, for each transport case and each
MCS type a 2-d matrix of P's was constructed.
The partial load factor evaluation is then carried
out, which is the minimisation of the error in
comparison with the target safety index, i.e.:
Error = £ ( £ « , « - f l ) 2
In this minimisation YR and YD are varied and that
combination of YR and YD are selected where Error
is as close to zero possible for each selected target
value (i.e. resulting in a probability of failure of
0.1,0.01, etc).
g)
2.2
In this minimisation of Error, the summation
includes every transport case for which an actual
design value was available and which was
considered not too different from the average
transport type conditions. With these YR and YD the
probability of failure Pp of the cases was recalculated.
LOAD FACTOR STUDY: RESULTS
The PF value was compared with the target and
inspected as to consistency between the cases.
Partial Safety Factors
Case
Pf
PfO.1
1.G0EO1
W C A/Bete 2 6 9 6 0 2
PT 0.01
1.C0EO2
fin Bèta
PT 0,001
FfQOOOI
1.63603
1.00EC3
1.00EO4
P
IresstaTce
idEmand
Tfricticn
1.282
070
070
070
077
077
091
070
088
1.12
1.5*
1.65
1.80
070
070
070
070
O70
070
1.928
2326
2942
aooo
1719
Table 4: Partial safety factors as function of
probability of failure
The case descriptions in above table give the target
probability of failure, where the present industry
Standard is represented by the case VMC Av. Bèta. In
the first Load Factor study this average reliability was
established for the Voyage Motion Climate
calculation method.
Additionally, and in a similar way load factors have
been established for component design, where
cribbing friction is not present. Safetrans allows
computation of component loads, e.g. leg bending
moments for Jack-Up rigs or internat structural loads
in container cranes. Thereto the user can define linear
combinations of motions and mass coefficients.
3.
CONSEQUENCE CLASSES AND
TARGET SAFETY
3.1
CONSEQUENCE CLASSES
criteria are adopted. For control of crew risk there is
the ISM guideline, but for structural safety the
industry itself has to set the target safety (probability
of failure). The Engineering Guideline of Safetrans
provides the table below for the grouping of typical
transport cases in various 'consequence classes'.
Various questions may be raised as to consequence
evaluation, and the most important will be discussed.
The concept of consequence classes basically addresses
the marine safety regime. The present convention is that
for environmental and human risk, the IMO acceptance
Table 5: Consequence class definition
C o m i a u a nc« C l a a i
CO
Slmpla oparallon High
Radundancv
C 1
W «II controllad o p a r a t l o n
with high r a d u n d a n c y
C 2
C o m p l a i or w « a t r i a r
canaltlve oDeratlon
C3
C o m p l t i and waathar
• i n attlva o p e ra tlo n
T y p » of o p a r a t l o n
O a n a rat c a r g o u p to 2 0 0 t o n i
C • n taln a r i
R oirina S t o c k
D ry t r a n i p o r l l o w v a l u s
• Jack Up» ( * m a l l m « d l u m )
Type O l a n a l v i l i
C argo aaeurlng
m a n u • 1 w llh d a a l g n
m o l i o n d la d r a m t
- Birgti
0 p a r a Ilo n a 1
r a q u Iro m a n t t
Saa
VM C
- D radge Cargo
- C o n taln e r c r a n t i
• Dry t r a n a p o r l H i g h V a l u a
• W ealhar roulad Iranapori
Low V a l u a
W * a t h a r roulad I r a n i p o r t high
va lu a
W « l tow Of h i g h v a l u a
VMC
IM 0
S a a IM 0
or M C S
On board axpert lyatam
( 0 B A S ) o p a i a t a d by
MCS
On board a ' p a r t i y i t a m
w Ith o n b o a r d e x p a r t
MCS
Human safety: The IMO guidelines address the role of
human safety in the consequence class definition and in
the target criteria setting. In reality these guidelines
were developed for passenger craft and any such marine
craft where total loss is synonymous with significant
human fatality. Against this background, in the case of
heavy lift transports:
•
Most of the transports have un-manned cargo with
minimum crew on board the transport vessel
• The heavy cargoes have an asset value running into
100sofmillions(ofUS$)
• The economie value of loss of cargo, in addition, is
orders of magnitude larger than the asset value.
Therefore it is unrealisttc to contemplate IMO human
safety criterion as a measure of consequence class for
heavy lift transport. Nevertheless, the Safetrans risk
analysis facilitates computation of human fatality risk
and other hazards for the ship and cargo should this be a
requirement for significantly manned transports. It
should also be noted that Safetrans takes due account of
the ship crew ISM rating.
operators and warranty surveyors (e.g. Dockwise,
Jumbo, etc, and NDE and MatDan) confirm that in
many sea-fastening designs there is redundancy.
Therefore, the presence of redundancy is proposed to
be a determining factor in the consequence class
grouping as given in the table above.
The Safetrans Quantitative Risk Analysis shows that
searfastening failure is only. one of the 7-9 hazards
identified to possibly lead to failure of the ship and/or
cargo on the voyage. However, for cargo safety the
proposed design approach fulfiïls the objective.
Effect of fatigue: Sea-fastening is usually designed
not to attract fatigue loading. Cargo owners, however,
have to consider fatigue contribution to the cargo
structure during transport, for which Safetrans
facilitates output of fatigue load cycle distributions.
3.2
TARGET SAFETY
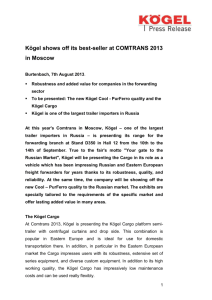
The plot in Fig. 8 is the final result of the Load factor
study and shows the relation between -yR and yD (with
YP = 0.7) and the probability of failure. On basis of a
prescribed probability of failure for a given consequence class the partial safety factors can be read off.
Does component failure lead to total failure? The Load
Factor Study assumes total load on the sea-fastening
and in case of failure a total loss of cargo. Transport
PARTIAL LOAD FACTORS
2.0
m
I
I
,
.
|
I
l
*~ Kesistance
~"~ Demand
'"—^
I
I
1.0 — — _
,
—L_
J.
—
^
•
*i-j
I
i
i
i
1.00E-04
1.00E-03
i
1
1.00E-02
Probability of Failure
Figure 8: Load factors for weather routed transport design using MCS
\
1.00 E-01
1 1
1
1 I t
1lÉ1 um mi
.
•
100E-04
1
1 1 1
Revised
Force/
Original
Force
Pau U B
Prctebdity
a
1.O0EÖ1
•269EC2
Q1.0CE02
C31.63E03
•1.00EO3
Figure 9: Design loadsfor selected Load Factor cases
4.
DISCUSSION OF RESULTS FOR LOAD
FACTOR CASES
4.I
NEW DESIGN VALUES
The new design loads are computed using the partial
factor for demand from this table together with the P90
acceleration and compared with the original design load.
The results are given in Fig. 9 above for a range of
probabilities of failure.
An interesting conclusion is found after comparing the
design value from the Safetrans MCS method with the
existing designs for the 5 selected cases. It shows that
according to the MCS calculations that reflect the
experience of actual transports as they occurred, these
transports are, on average, an order of magnitude safer
than it was perceived from the existing design method.
Hlndcasl
11%
SWÜstlcal
---—
6%
^
Modeüina
J^^L.
e*
Cargo Mass
r^^
^ ^ ^ ^ ^ ^
frictlonX.
/
18%
\ ^
wair
ModBlling 4 % ^ 4%
^
/
"""^^
^ ^
Cargo Mass i ^ ' ^ f c
^M 1
^
Another question may be the comparability of the
transport cases. It was discussed before that the
results of the load factor optimization were
-consistent. It is-interesting though to see in Figures
10a and 10b the typical sensitivity plots of the
contributions of the various uncertainty parameters. It
may be clear that for very heavy cargoes the friction
is the major single factor.
Hlndcasl Capaclty
Statistica) 8%
5%
Capaclty
7%
" wm
^T
One may wonder if this may suggest that the P90
value is too optimistic. This is not the case because
the code calibration uses the Gumbel asymptotic fit to
the histogram of voyage maxima (see Figure 2
above). Therefore, realistic probabilities that loads
occur which are higher than the P90 design value are
included in the calculated failure probability. So, the
conclusion is justified. Further this conservatism is
also justified in the light of consequence of cargo
loss.
• Trans.Ace
'
40%
^
8%
Sensitivity Plot for Average of BOA, Adriatic& Sea Star
r
±
m
è^_^/
k
Trans A c e
25%
7wdd
/
5%
Sensitivity Plot for Average ofThunderhorse and
Calaxy
Figure 10 a and 10b: Difference of cribbingfriction effect between heavy and light cargoes
4.2
CASE: GLOMAR ADRIATIC TRANSPORT
The 10265 t Adriatic Jack Up rig was transported from
the Gulf of Mexico to the Mediterranean Sea on the Blue
Marlin of Dockwise. The voyage was planned for
January-February departure. Since the legs were fully
erected, the leg bending moment was the limiting
criterion for weather routing. On basis of Dockwise
response calculations the snip had to avoid 6.7 m beam
seas and avoid head seas or bow quartering seas
exceeding 7.6 m Hs. In Table 5 the transport would be
Consequence Class C2.
The actual design load for the sea fastening (including
wind effect) was based on design wave response calculations, which were quite comparable with Voyage
Motion Calculations (VMC) shown in Table 6. On basis
of the First Load Factor study, the VMC method is
accepted industry Standard.
An operational criterion of 6 m Hs for weather routing
and shelter options (in the Bermuda's and at Canary
islands) were included in the simulations, covering the
Atlantic Ocean part of the voyage. Additionally,
simulations without and with a lower (4 m) wave height
criterion were carried out as comparison. The ensemble
analysis of the multiple Monte Carlo simulations showed
the following results:
Pi
^ÓHB
ijSXtpt
Fig. II: Glomar Adriatic 2 on Blue Marlin
Table 6: Voyage simulation results Glomar Adriatic IV on Blue Marlin
Quantity
Simulations all)
Di mension VMC
4.0
Operational Sign. wave height criterion m
6.0
Max. Significant Wave height
5.91
m
7.47
6.33
Max. Roll angle
16.4
11.5
degr
12.2
Max. Vert. Acceleration at bow
2.37
m/s'
3.13
2.26
Max. Transv. Acceleration CG
2.81
2.73
m/s'
3.65
Travel time range (All)
380-472
436-596
Hrs
391
436-554
Travel time (98%)
Hrs
380-433
4.4 E-3
Economie (damage) risk
6.2 E-3
0.4 E-3
Human fatalities risk
0.9 E-3
2.7 E-3
Environmental risk
3.8 E-3
The simulations without using the Captain's Decision
Mimic (CDM) are labelled "w.o." in the header row of
Table 6.
The effect of weather routing with the Hs = 6 m criterion
is small: the characteristic value for the significant wave
height is reduced by 5% and the voyage duration tends to
be slightly longer. The reason for not finding much effect
is the relatively benign climatology in January and
February on the selected Southern route. A significant
wave height of 6 m is seldom exceeded and if so, it is not
always well avoided because the voyage is eastbound. So
the prevailing weather follows the ship, which reduces the
tendency to re-route or apply heading and speed changes
for 'comfort'. Such observations have also been made by
Van Sluijs and Stijnman in [6],
The simulation result for a 4 m Hs criterion shows a
clear effect: reduced risk and longer voyage duration.
However, the characteristic value for the significant
wave height is reduced by only 10 % for the same
reason as given above.
The total transverse sea-fastening force can be computed using the input option of a linear combi nat ion of
signals in Safetrans. This allows the inclusion of direct
(I hr mean) wind loads, while effect of wind heel is
already included in the transverse acceleration ay.
Hence:
p (total) =
M (Jack-U P )
In a similar way the leg bending moment in the jacking
house can be computed, e.g.:
Mx(fcti
= M<«s>.h. ay<"s «'™'> _ i<"ö ^ +
+
p (wind on leg) L _ w (wind on leg)
in which h is the distance from jacking house to the CG of
(CGJack-Up)
+
p (wind)
Applying the safety factors on the results gives the
following design values for the total transverse load:
Table 7: Design values using present design equation and load factors
Quantity
Probability of
Original design
Dimension
value (*to yield)
failure
Total transverse load
kN
1.0 E-2
•37490
Total transverse load
kN
1.6 E-3
Transverse acceleration
m/s'
4.1
The design values are given for two probabilities of
failure. The advised values for consequence class C2 were
not yet availabte at the submission of this paper, but are
expected to be in the given range.
Simulations (w.o.)
6.57
12.0
2.26
2.76
376-427
376-422
6.4 E-3
0.9 E-3
3.9 E-3
New design
value (*to yield)
* 29860
•41900
2.8
the leg. Inclusion of wind leads to about 6% increase
ofMx<V
At the issue of the paper the load factors for internal
structual loads were not yet available.
The actual voyage was to Alexandria from Feb. 3,
2003 to Mar. 1, 2003, of which the North Altlantic
crossing was simulated as most critical part. The
encountered weather and simulated route are given in
Figures 12a and 12b, showing benign weather on
route.
•<•••,,••••,,
p ^ T ^ ^ T T ^ ^ — — i ^ l ^ T B
/Adrlatlc_IV_Marin/AdrlatlG_IV_on_Blu«_Mullnf 8«f«trans 31 AD
Figure 12a and 12b: Voyage simulation over North Atlantic part of the voyage.
5.
CONCLUSION
The work carried out in the Load Factor study and
Engineering Guideline for use of Safetrans is presented in
this paper. Application in the example case, as well as
earlier [1] and recent [7] validation work has demonstrated the applicability of the risk based, probabilistic
design method. A realistic effect of weather routing is
computed and can be accounted for in the design. Target
applications are for heavy cargo self-propelled transports
or tows, and transports of vulnerable cargo where Hmiting
sea conditions appty.
The linear combination of stgnals allows Safetrans to
compute loads in cargo, corner loads and sea-fastening
loads. The combination takes phasing of accelerations as
well as wind effects properly into account.
[4]
Argoss B.V.: "Checking for the Dependence
between Safetrans Monte Carlo Simulations" Report
No. A 403, June 2004 (restricted to JIP members)
[5]
COMREL: Part of STRUREL for structural
reliability analysis developed by RCP GmbH, Barer
Strasse 48/iII, 80799 MÜNCHEN, Federal Republic
of Germany.
[6]
M.F. van Sluijs and J.J
Stijnman:
"Observations on waves and ship's behaviour made on
board of Dutch Ships" Netherlands Ship Research
Centre TNO, Report 136 S, Dec 1971
[7]
R.V. Ahilan, R. Nataraja, A.B. Aalbers, S.
Anink: "SAFETRANS-Response Based Heavy
Cargo Transportation Design", City University JackUp Conference, Sept. 2005
8.
6.
The Authors would like to thank the following persons for
their effort to make the Safetrans software a design tooi:
Dr R.V. Ahilan of Noble Denton Europe for his
contribution in the development of the Load Factor Study,
Mr C.E.J. Leenaars of Dockwise for the contributions to
the Engineering Guideline, Mr M. Levadou for his
contributions to the design case calculations and Mr F.
Vollen and Prof. T. Moan for their contributions to the
consequence class analysis.
7.
AUTHORS BIOGRAPHIES
ACKNOWLEDGEMENTS
REFERENCES
[1]
A.B. Aalbers, C.K. Cooper, S. Nowak, J.R.
Lloyd, C.E.J. Leenaars and F. Vollen: " SafeTrans: A
New Software System For Safer Rig Moves", City
University Jack-Up Conference, Sept 2001
[2]
Noble Denton Europe Ltd. "Pilot Calibration of
Reliability Based Safety Factors Using V.A.C." Report
No. L18753/NDE/BLC (restricted to JIP members)
[3]
Ocean Weather Inc.: "Wind and Wave Analysis
of the IMDSS Data in Safetrans" Report to Safetrans User
Group, Dec 2003
Dr R. Nataraja has over 29 years experience in
Offshore Engineering. After obtaining his doctorate
from Loughborough University in 1974, he was a
lecturer at Cranfield Inst. of Techn., Head of R&D at
Lloyd's Register of Shipping, R&D manager at Brown
and Root, and at Kvaerner Earl and Wright. He has
been with NDE for the last 4 years as a Sr. Principal
Engineer, responsible for technology development and
research projects, and carrying out Design and Concept evaluations for Certification.
S. Anink holds the current position of R&D Engineer
at Dockwise Transport B.V. After MSc graduation in
2001 from Delft Technical University, he is responsible for the engineering and design of non-standard
transports, which include novel developments for seafastening, cribbing and design methods.
A.B. Aalbers has over 25 years of experience in
Offshore hydrodynamics and presently holds the
position of Sr. Researcher and Joint Industry Projects
Co-ordinator at the Maritime Research lnstitute
Netherlands. As project manager he is responsible for
the design and development of the Safetrans software
and the Safetrans User Group.