Document
advertisement

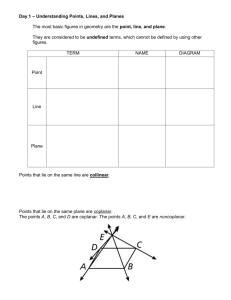
2.1 2.1.1 Three Dimensional Curves and Surfaces Parametric Equation of a Line Any line in two- or three-dimensional space can be uniquely specified by a point on the line and a vector parallel to the line. The line then is the line parallel to the vector v = (a, b, c) passing through the point P0 (x0 , y0 , z0 ). In particular, if we view the vector as having its initial point at P0 , then we can move away from P0 along the line by adding multiples of v. In other y x 0.0 1.0 0.5 1.0 0.5 0.0 2.0 L 1.5 z 1.0 P0 Hx0 ,y0 ,z0 L Ha,b,cL 0.5 v 0.0 Figure 1: Parametric equation of a line. words, we can move tv along the line. In other words, the position of point Q(x, y, z) on the line is given by (x, y, z) = (x0 , y0 , z0 ) + t(a, b, c) = (x0 + at, y0 + bt, z0 + ct) . (1) This gives us the parametric equations of a line in 3-space for a line passing through P (x0 , y0 , z0 ) and parallel to v = ai + bj + ck : x = x0 + at , y = y0 + bt , 1 z = z0 + ct . (2) Here t is the parameter that determines how far along the line you have moved. Example: Find the parametric equation of the line passing through P (1, 3, 2), parallel to 2i − j + 3k. Solution: The line is given by parametric equations x = 1 + 2t , y = 3 − t, z = 2 + 3t . Note that these lines are infinite. If we want only a line segment we must restrict the parameter. Thus, the line given in the example can be restricted to the line segment joining P (1, 3, 2) to Q(3, 2, 5) if we restrict t to the interval 0 ≤ t ≤ 1. Finally, two lines that are not parallel and do not cross are called skew lines. 2.1.1.1 Representing the parametric equation using vectors If instead of an initial point P (x0 , y0 , z0 ), we define a position vector r0 = (x0 , y0 , z0 ) to give an initial position on a line and r = (x, y, z) for any point on the line parallel to v = (a, b, c) through P , then equation (1) can be represented by the vector equation of a line as r = r0 + tv . (3) This is shown in Figure 2. Note that all these vectors are defined with initial points at the origin. This is entirely equivalent to the equations in (2), but the notation is obviously briefer, and the interpretation is purely in terms of vectors. If you need to think about this more intuitively, think of r as ordinary position vectors in space, r as a “velocity” vector and t as “time”. This then looks like one of the usual equations for linear motion in vector form. However, we can use this more generally for any parameter t and appropriate vector v. Let’s return to the previous example: Example: Find the vector equation of the line passing through P (1, 3, 2), parallel to 2i − j + 3k.. Solution: The initial position is given by the vector r0 = (1, 3, 2) , 2 y 2.0 L 1.5 P0 Hx0 ,y0 L 1.0 r 0.5 r0 vt v 0.0 0.0 0.2 0.4 0.6 0.8 1.0 1.2 x Figure 2: Vector equation of a line r = r0 + vt. and the vector equation is r = (1, 3, 2)+t(2, −1, 3) = (1+2t, 3−t, 2+3t) = (1+2t)i+(3−t)j+(2+3t)k . It is important to be comfortable with all these ways of writing parametric equations of a line. 2.1.2 Planes The first type of planes we might think of are the coordinate planes. The xy-plane, for example, is the set of a x and y with z = 0. By extension, we can imagine planes parallel to the coordinate planes. For example, the plane x = a is the set of all y and z such that x = a. These types of planes are shown in Figure 3. 3 z z z y y x z=c x y=b y x x=a Figure 3: Planes parallel to the coordinate axes. 2.1.2.1 Planes specified by a point and normal vector Any plane in 3-space can be uniquely determined by giving a point on the plane and a vector perpendicular to the plane, called a normal vector. Suppose we want to find an equation of the plane passing through P (x0 , y0 , z0 ) and perpendicular to n = (a, b, c). Let us define the vector r0 = (x0 , y0 , z0 ) pointing to P , and r = (x, y, z) pointing to another point Q. Since n is perpendicular to the plane, n · r0 = n · r = 0, and therefore n · (r − r0 ) = 0 , (4) which in component form is written (a, b, c) · (x − x0 , y − y0 , z − z0 ) = 0 , (5) which results in the equation a(x − x0 ) + b(y − y0 ) + c(z − z0 ) = 0 . (6) This is known as the point-normal form of the equation of a plane. Equation (4) is the vector form of this equation. Example: Find the equation of the plane passing though (1, 2, −1) and with normal vector n = (2, 3, 1). Solution: We use equation (6) to give us 2(x − 1) + 3(y − 2) + 1(z + 1) = 0 , 4 which can be simplified to 2x + 3y + z − 7 = 0 . In fact, this final form can be generalised to ax + by + cz + d = 0 , (7) which is the equation with graph that is a plane with n = (a, b, c) as a normal. This is called the general form of the equation of a plane. d is determined by knowing a point that lies in the plane and substituting into the equation to find d. Other ways to determine a plane are a point and two vectors parallel to the plane, or three points in the plane. Note that these allow us to find a normal vector and so the equation of the plane. The cross-product of two vectors in the plane will give a vector normal to the plane. Three points P1 , P2 and P3 −−→ −−→ allow us to define two vectors P1 P2 and P1 P3 , which again allow us to find the normal vector. 2.1.2.2 Intersecting planes Two distinct planes have an acute angle of intersection, 0 ≤ θ ≤ π/2. The angle is the same as either the angle between n1 and n2 or between n1 and −n2 depending on the direction of the normal vectors. However, in either case the angle is given by cos θ = |n1 · n2 | . ||n1 ||||n2 || (8) The absolute value ensures that regardless of the sign of the normal vectors we always have an acute angle. Example: Find the angle between the planes 2x − y + 2z = 3 , 2x + 4y − 4z = 0 . Solution: The normal vectors are given by n1 = (2, −1, 2) and n2 = (2, 4, −4), and the angle is found from cos θ = |4 − 4 − 8| | − 8| 4 √ √ = = , (3)(6) 9 9 36 5 x -1.0 -0.5 0.0 0.5 n1 n2 1.0 Θ 5 Θ 0 z -5 -1.0 -0.5 0.0 0.5 1.0 y Figure 4: Intersecting planes. which gives the angle θ = cos−1 2.1.2.3 4 = 1.11024 rad = 63.6122o . 9 Distance problems involving planes There are three distance problems we will be concerned with: the distance between a point and a plane; the distance between two parallel planes; find the distance between two skew lines. Theorem: The distance D between a point P (x0 , y0 , z0 ) and the plane ax + by + cz + d = 0 is |ax0 + by0 + cz0 + d| √ D= . (9) a2 + b 2 + c 2 Proof: Let Q(x1 , y1 , z1 ) be a point in the plane, and n = (a, b, c) the normal vector with its initial point is at Q. Consider Figure 5. The distance D is −−→ equal to the length of the orthogonal projection of QP0 onto n. Therefore, recalling v·b projb v = b, (10) ||b||2 6 P0 Hx0 ,y0 ,z0 L projn QP0 D QHx1 ,y1 ,z1 L Figure 5: Projection onto normal vector: distance from plane. we get −−→ −→ QP · n |− −−→ QP0 · n| 0 D = ||projn QP0 || = n = . ||n||2 ||n|| (11) However, we can write −−→ QP0 = (x1 − x0 , y1 − y0 , z1 − z0 ) −−→ ⇒QP0 · na(x1 − x0 ) + b(y1 − y0 ) + c(z1 − z0 ) , and ||n|| = √ a2 + b 2 + c 2 , (12) (13) which together give us D = |a(x0 − x1 ) + b(y0 − y1 ) + c(z0 − z1 ) √ a2 + b 2 + c 2 . (14) Moreover, since Q lies in the plane, it satisfies the equation ax1 + by1 + cz1 + d = 0 , (15) d = −ax1 − by1 − cz1 , (16) which allows us to find d, and therefore we find the result. 7 Example: Find the distance between the point P (4, 4, 2) and the plane x − 2y + 4z + 2 = 0 . Solution: Using (11) we get |(1)(4) + (−2)(4) + (4)(2) + 2| |6| √ = = 1. (17) 2 2 2 6 4 +4 +2 To compute the distance between two parallel planes, compute the distance between one plane and any point in the other plane. To find the distance between skew lines, define two parallel planes each of which contains one of the skew lines. Then the distance between the planes gives the distance between the skew lines. D= Example: Find the distance between the skew lines L1 : x = 1 + 4t y = 5 − 4t , z = −1 + 5t , L1 : x = 2 + 8t y = 4 − 3t , z = 5 + t . Solution: Let P1 and P2 be parallel planes containing L1 and L2 respectively. We can find a point on each line and hence in each plane by setting t = 0, giving Q1 (1, 5, −1) and Q2 (2, 4, 5), see Figure 6. Let’s use Q1 and find the Q2 L2 D L1 Q1 Figure 6: Distance between skew lines. equation of the plane P2 . Since the planes are parallel, the vectors used to define the parametric equations of the lines u1 = (4, −4, 5) and u2 = (8, −3, 1) are both parallel to P2 . Hence i j k n = u1 × u2 = 4 −4 5 = 11i + 36j + 20k , 8 −3 1 8 is normal to P1 and P2 . With this normal vector and the point Q2 , we find the equation of P2 : 11(c − 2) + 36(y − 4) + 20(z − 5) = 0 , which can be written in the general form 11x + 36y + 20z − 266 = 0 . Therefore the distance from P2 to the point Q1 (1, 5, −1) is D= |(11)(1) + (36)(5) + (20)(−1) − 266| 95 √ =√ , 2 2 2 11 + 36 + 20 1817 which in turn is the distance from L1 to L2 , since they lie in the parallel planes. 2.1.3 Quadric Surfaces The generalisation to the general quadratic equation ?? which from which conic sections were derived in 2-space is the second-degree equation in x, y and z, Ax2 + By 2 + Cz 2 + Dxy + Exz + F yz + Gx + Hy + Ik + J = 0 . (18) The graphs of this family of equations are called the quadric surfaces. There are six common types of quadrics, x2 y 2 z 2 + 2 + 2 =1 a2 b c x2 y 2 z 2 2. Hyperboloid of One Sheet: + 2 − 2 =1 a2 b c z 2 x2 y 2 3. Hyperboloid of Two Sheets: 2 − 2 − 2 = 1 c a b (19) 2 x y2 2 4. Elliptic Cone: z = 2+ 2 a b x2 y 2 5. Elliptic Paraboloid: z= 2+ 2 a b 2 y x2 6. Hyperbolic Paraboloid: z= 2 − 2 b a where we assume that a, b, c > 0. These are shown in Figure 7. They have the following traces 1. Ellipsoid: 9 1. Ellipsoid: Traces in the coordinate planes are ellipses. 2. Hyperboloid of One Sheet: The trace in the xy-plane are ellipses, and traces in the xz- and yz-planes are hyperbolas. 3. Hyperboloid of Two Sheets: There is no trace in the xy-plane, although the traces in planes parallel to the xy-plane are ellipses provided there is a trace, and traces in the xz- and yz-planes are hyperbolas. 4. Elliptic Cone: The trace in the xy-plane is a point and in planes parallel to the xy-plane the traces are ellipses, and traces in the xz- and yzplanes are pairs of intersecting lines. 5. Elliptic Paraboloid: The trace in the xy-plane is a point and in planes parallel to and above the xy-plane the traces are ellipses, and traces in the xz- and yz-planes are parabolas. 6. Hyperbolic Paraboloid: The trace in the xy-plane is a pair of intersecting lines, and traces in planes parallel to the xy-plane are hyperbolas, which open in the y-direction when above the xy-plane and open in the xdirection when below the xy-plane. Traces in the xz- and yz-planes are parabolas. These of course can also appear in other orientations along different coordinate axes, or indeed with cross-product terms which would result in other orientations. If the elliptic cross-section of an elliptic cone or elliptic paraboloid is circular the are called a circular cone and a circular paraboloid respectively. Of course an ellipsoid with all the cross-sections circular is a sphere, i.e. a = b = c. You are not expected to accurately draw any of these surfaces. If asked for a sketch, draw the traces on the planes, and join these to give a rough idea of the shape. As with the conic sections we can translate a quadric surface by moving away from the origin to (a, b, c), which will result in the change (x, y, z) → (x − a, y − b, z − c) in the equations for the surfaces. However, this will not be required for this course. 10 y -2 2. 2 1 0 -1 4 2 y 1. 2 1 0 z 0 -1 -2 -2 1.0 0.5 -4 z 0.0 -2 -0.5 -1 -1.0 0 -2 -1 1 0 1 x 2 2 x y -2 3. -1 y 2 1 0 2 1 0 -1 5 4. -2 1 z 0 0 z -1 -5 -2 -1 -2 -1 0 0 1 2 1 x y x 2 2 1 0 5.-2 y -1 2 1 0 3 -1 6.-2 2 2 z 1 z 1 0 0 -1 -2 -2 -1 -1 0 0 1 x 2 11 Figure 7: Quadric surfaces. x 1 2 2.1.4 Cylindrical and Spherical Coordinates We have already met polar coordinates in 2-space. Now we introduce two coordinate systems that are often useful when rectangular coordinates are awkward in 3-space. Cylindrical coordinates (ρ, θ, z): In terms of cylindrical coordinates the rectangular coordinates are written x = ρ cos θ , y = ρ sin θ , z, (20) where 0 ≤ ρ < ∞, 0 ≤ θ < 2π. This is shown in Figure 8 If we wish to go x 2.0 1.5 0.0 0.5 1.0 2.0 1.5 1.0 z z Ρ Θ 0.5 0.0 0.5 1.0 1.5 0.0 2.0 y Figure 8: Cylindrical coordinates (ρ, θ, φ). from rectangular to cylindrical coordinates directly, we can use the relations p y ρ = x2 + y 2 , tan θ = , z = z . (21) x Spherical coordinates: In terms of spherical coordinates the rectangular coordinates are written x = ρ sin φ cos θ , y = ρ sin φ sin θ , z = ρ cos φ , (22) where 0 ≤ ρ < ∞, 0 ≤ θ < 2π and 0 ≤ φ ≤ π. Figure 9 shows spherical coordinates. If we wish to go from rectangular to spherical coordinates directly, 12 x 2.0 2.0 1.5 1.0 0.5 0.0 1.5 z 1.0 Φ Θ 0.5 0.0 0.0 Ρ 0.5 1.0 1.5 y 2.0 Figure 9: Spherical coordinates. we can use the relations p ρ = x2 + y 2 + z 2 , tan θ = y , x z cos φ = p . 2 x + y2 + z2 (23) Example: Change x2 + y 2 + z 2 = 9 to spherical polar coordinates. Solution: The coordinates for this surface (a sphere) are for ρ = 3 and so x = 3 sin φ cos θ , y = 3 sin φ sin θ , where θ and φ are the parameters. 13 z = 3 cos φ , (24)