PHYSIOLOGY OF TOUCH
advertisement

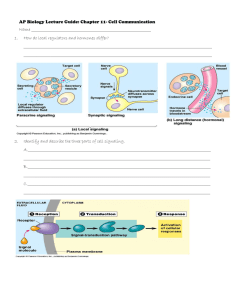
THE SENSE OF TOUCH Jukka Raisamo Multimodal Interaction Group Tampere Unit for Computer-Human Interaction Department of Computer Sciences University of Tampere, Finland Outline for the talk • About the sense of touch • Physiology of touch • Haptic perception 1 The sense of touch 1/2 • Touch is our oldest, most primitive and pervasive sense – in general, the first sense we experience in the womb and the last one we lose before death • Touch is a proximal sense, i.e. we feel things close to us or actually contact us – some exceptions occur, e.g. heat radiation & deep bass tones – touch can be extended with special tools (e.g. a long cane provides vibratory and pressure information for a blind) 2 The sense(s) of touch 2/2 • Synonym to tactual perception • Touch often considered one of five human senses defined by Aristotle.. ..however, when a person touches various feelings from pressure to temperature and pain are evoked • Thus the term “touch” is actually a combined term for several sub-modalities – in medicine touch is usually replaced with the term somatic senses to better reflect the variety of sersory mechanisms involved • The senses of touch are mediated by the somatosensory system 3 ”The little man inside the brain” • Sensory homunculus for touch – shows what a man's body would look like if each body part would grow in proportion to the area of the brain concerned with its sensory perception Natural History Museum, London http://www.nhm.ac.uk/ 4 • Lips, tongue, hands, feet and genitals are considerably more sensitive than other parts of the body Somatosensory system 1/2 • Sensory systems associated with the body • Concerned with sensory information from the skin, joints, muscles and internal organs – the sensory information is highly sensitive to temperature • Four main modalities: – the tactile senses (touch) – the kinesthetic senses (proprioception) – temperature – pain 5 Somatosensory system 2/2 • Each somatosensory modality has its own receptors or nerve endings • Basic somatosensory pathway in short: – if stimulus is larger than the threshold of its receptor, a response is triggered – electrical discharge is carried by the afferents to the peripheral nerves – impulses travel through spinal cord to the brains – sensations are registered at the somatosensory cortex • The greater the stimulus the more the receptor discharges & the larger amount of receptors discharge 6 Receptor classifications 1/2 • Location based classification – skin receptors (exteroceptors) are located close to the skin surface (touch-pressure, vibration, temperature, pain) – muscle and joint receptors (proprioceptors) are located in tendons, muscles and joints (position & movement) – visceral receptors (interoceptors) are associated with the internal organs (heart rate, blood pressure) 7 Receptor classifications 2/2 • Transduction mechanism based classification – mechanoreceptors are responsive to any kind of mechanical deformation – thermoreceptors are responsive to changes in temperature – chemoreceptors are responsive to substances produced within the skin – nociceptors are specialized for detecting painful stimuli 8 The tactile senses tactile [from Latin tactilis, to touch]: 1 : perceptible by touch 2 : of, relating to, or being the sense of touch (Merriam-Webster Online Dictionary ) 9 Video: The Power of Touch (2:57) http://www.teachersdomain.org/resources/tdc02/sci/life/reg /touch/assets/tdc02_vid_touch/tdc02_vid_touch_56.mov 10 Skin 1/2 • The largest & heaviest organ in human body (~1,8 m2, 4 kg) – – – – viscoelastic tissue (stretches & maintains its shape) protects the body from dehydration & physical injury regulates body temperature & blood pressure contains structures responsible for ability to feel • When we feel embarrassed, touched, selfconscious, or extremely sensitive we often feel it directly as a charge at skin level – psychological characteristic of the openness of skin may be vulnerability, pleasure or excitement 11 Skin 2/2 • Layers of the skin – epidermis (0.15-1.5 mm): outermost protective layer, renews fast, contains e.g. pigment cells and keratin – dermis (0.3-3.0 mm): beneath epidermis, contains e.g. most of the skin receptors, nerve endings, blood vessels – subcutaneous tissue (thickness varies greatly): for insulation and storage of energy, contains e.g. fat, nerves and blood vessels 12 Skin receptors 1/3 • Tactile sensations are experienced with the entire skin surface – different areas of skin have different qualities (e.g. hairy skin has “soft touch” channel that is found to be associated with emotions) • Tactile sensing plays an important role in object discrimination and manipulation – contact detection – tool manipulation – tactile ability to sense vibration & skin deformation is critical for determining surface texture 13 Skin receptors 2/3 • The receptors function optimally with light contact • Skin receptors are divided into two categories based on their speed of adaptation – slowly adapting (SA) receptors detect constant stimulus (e.g. pressure & skin stretch) – rapidly adapting (RA) ones detect only short pulses (e.g. initial contact & vibration) RA SA stimulus stimulus 14 Skin receptors 3/3 • Mechanoreceptors have different spatial and temporal resolutions – spatial resolution depends on location of the skin (i.e. what and how many receptors are found in the locus) – the size of the receptive field depends on how deep in the skin the particular receptor type lies – type I receptors have large receptive field (low spatial resolution); type II receptor have small field (good resolution) – temporal resolution depends on the stimuli, not receptor type Small receptive field Large receptive field 15 Tactile senses • Skin can be stimulated by tactile feedback (discussed more on Lecture 2) 16 The kinesthetic senses (proprioception) proprioception [from Latin proprius, one’s own]: the reception of stimuli produced within the organism (Merriam-Webster Online Dictionary ) 17 Proprioception 1/2 • Tells us what happens below the body surface – stretch receptors within muscles with rapidlyadapting and slowly-adapting components – receptors to monitor tensions and forces at the tendons and joints – associates with the neural signals derived from motor commands 18 Proprioception 2/2 • Mediated by receptors located in muscles, tendons, and joints – stimulated by bodily movements and tensions • Receptors register different kinds of information – cutaneous mechanoreceptors (skin stretch) – muscle spindles (muscle stretch), – Golgi tendon organs (tendon stretch) – joint receptors (joint stretch) • Proprioception can be stimulated by force feedback (discussed more on Lecture 3) 19 Temperature and pain 20 Pain and temperature 1/2 • Pain and temperature system does not have specialized receptor organs – the changes in the body state is perceived via free nerve endings found throughout skin, muscles, bones, and tissues – most pain is a result of substances released by damaged tissues 21 Pain and temperature 2/2 • Temperature receptors (thermoreceptors) – around 30 cold receptors per each hot receptor – warm receptors are maximally responsive at 45°C, cold receptors at 27°C – more responsive to a change in temperature than to a constant temperature • Pain receptors (nociceptors) – nerve endings sensitive for mechanical, thermal or chemical stimuli – highly important for avoiding accidents 22 Haptic perception haptic [from Greek haptesthai to touch]: 1 : relating to or based on the sense of touch 2 : characterized by a predilection for the sense of touch (Merriam-Webster Online Dictionary ) 23 Haptic perception 1/2 • Vision vs. touch – vision more capable of providing geometric information & general picture – touch more effective at providing material information & fine surface details • Different strategies for touching – active touch (focus on the object) – passive touch (focus on the sensation experienced) 24 Haptic perception 2/2 • Haptic perception integrates somatosensory information – touch mediates material properties (texture, hardness, temperature etc.) – proprioception provides spatial and motor information () • The perceived frequency of the grating depends on both the physical frequency of stimulation and information about how fast the finger is being moved across the surface. 25 Active vs. passive touch • The great cookie-cutter experiment by Gibson (1962) – experimenter pushes cookie cutter onto subject’s palm Ö 49% correct identification – subject actively feels cookie cutter with the palm Ö 95% correct identification • Demonstrated that active exploration is essential in the our ability to perceive the objects in the physical world 26 Exploratory procedures • Exploratory procedures defined by Lederman & Klatzky (1987) – stereotypical ways of touching – enhances the relevant perceptual information by heightening the responses of the specific mechanoreceptors 27 Real-world exploration • Blind paleobiologist: Geerat Vermeij, Professor of Geology, UC Davis – Born with a childhood form of glaucoma, had both eyes removed in 1950 because of constant pain and in danger of brain damage. – Vermeij does all his work with his hands, using his exquisitely trained sense of touch. 28 Questions, please? 29 26