Springer Handbook of Experimental Solid Mechanics: Chapter 3
advertisement

49
Mechanics of
3. Mechanics of Polymers: Viscoelasticity
Wolfgang G. Knauss, Igor Emri, Hongbing Lu
3.1
3.2
Historical Background ...........................
3.1.1 The Building Blocks of the Theory
of Viscoelasticity ..........................
49
Linear Viscoelasticity .............................
3.2.1 A Simple Linear Concept: Response
to a Step-Function Input ..............
3.2.2 Specific Constitutive Responses
(Isotropic Solids) ..........................
3.2.3 Mathematical Representation of
the Relaxation and Creep Functions
3.2.4 General Constitutive Law for Linear
and Isotropic Solid: Poisson Effect ..
3.2.5 Spectral and Functional
Representations ...........................
51
3.2.6 Special Stress or Strain Histories
Related to Material Characterization
3.2.7 Dissipation
Under Cyclical Deformation............
3.2.8 Temperature Effects ......................
3.2.9 The Effect of Pressure
on Viscoelastic Behavior
of Rubbery Solids .........................
3.2.10 The Effect of Moisture and Solvents
on Viscoelastic Behavior................
3.3
3.4
50
51
Measurements and Methods ..................
3.3.1 Laboratory Concerns .....................
3.3.2 Volumetric (Bulk) Response ...........
3.3.3 The CEM Measuring System ............
3.3.4 Nano/Microindentation
for Measurements
of Viscoelastic Properties
of Small Amounts of Material.........
3.3.5 Photoviscoelasticity ......................
Nonlinearly Viscoelastic Material
Characterization ...................................
3.4.1 Visual Assessment
of Nonlinear Behavior...................
3.4.2 Characterization
of Nonlinearly Viscoelastic Behavior
Under Biaxial Stress States ............
56
63
63
68
69
69
70
71
74
76
83
84
84
85
53
3.5
Closing Remarks ...................................
89
53
55
3.6 Recognizing Viscoelastic Solutions
if the Elastic Solution is Known..............
3.6.1 Further Reading ...........................
90
90
55
References ..................................................
92
3.1 Historical Background
During the past five decades the use of polymers has
seen a tremendous rise in engineering applications. This
growing acceptance of a variety of polymer-based de-
signs derives in part from the ease with which these
materials can be formed into virtually any shape, and
in part because of their generally excellent performance
Part A 3
With the heavy influx of polymers into engineering
designs their special, deformation-rate-sensitive
properties require particular attention. Although
we often refer to them as time-dependent materials, their properties really do not depend on
time, but time histories factor prominently in the
responses of polymeric components or structures.
Structural responses involving time-dependent
materials cannot be assessed by simply substituting time-dependent modulus functions for their
elastic counterparts. The outline provided here is
intended to provide guidance to the experimentally inclined researcher who is not thoroughly
familiar with how these materials behave, but
needs to be aware of these materials because
laboratory life and applications today invariably
involve their use.
50
Part A
Solid Mechanics Topics
Part A 3.1
in otherwise normally corrosive environments. This recent emergence is driven by our evolving capabilities
during the last seven decades to synthesize polymers in
great variety and to address their processing into useful
shapes.
Historically polymers have played a significant role
in human developments, as illustrated by the introductory comments in [3.1]. Of great consequence for
the survival or dominance of tribes or nations was the
development of animal-derived adhesives for the construction of high-performance bows, starting with the
American Indian of the Northwest through the developments by the Tartars and leading to the extraordinary
military exploits of the Turks in the latter Middle
Ages [3.2]. In principle, these very old methods of
producing weaponry continue to aid today in the construction of modern aerospace structures. While the
current technology still uses principles exploited by our
ancestors many years ago, the advent of the synthetic
polymers has provided a plethora of properties available for a vast range of different engineering designs.
This range of properties is, indeed, so large that empirical methods are no longer sufficient to effect reliable
engineering developments but must now be supported
by optimum analytical methods to aid in the design
process.
One characteristic of polymers is their relative sensitivity to load exposure for extended periods of time
or to the rate of deformations imposed on them. This
behavior is usually and widely combined under the
concept of viscoelastic behavior, though it is sometimes characterized as representing fading memory of
the material. These time-sensitive characteristics typically extend over many decades of the time scale
and characteristically set polymers apart from the
normal engineering metals. While the strain-rate sensitivity [3.3] and the time dependence of failure in
metals [3.4] are recognized and creep as well as creep
rupture [3.5–10] of metals is well documented, one
finds that the incorporation of rate-dependent material
properties into models of time-dependent crack growth
– other than fatigue of intrinsically rate-insensitive materials – still stands on a relatively weak foundation.
Metallic glasses (i.e., amorphous metals) are relatively
newcomers to the pool of engineering materials. Their
physical properties are at the beginning of exploration,
but it is already becoming clear through initial studies [3.11, 12] that their amorphous structure endows
them with properties many of which closely resemble
those of amorphous polymers. While these developments are essentially in their infancy at this time it is
well to bear in mind that certain parts of the following
exposition are also applicable to these materials.
Because the emphasis in this volume is placed on
experimental methods, rather than on stress analysis
methods, only a cursory review of the linearized theory
of viscoelasticity is included. For the reader’s educational benefit a number of books and papers have been
listed in the Further Reading section, which can serve
as resources for a more in-depth treatment. This review of material description and analysis is thus guided
by particular deformation histories as a background
for measurements addressing material characterization
to be used in engineering design applications. Although the nonlinearly viscoelastic characteristic of
these materials are not well understood in a general,
three-dimensional setting, we include some reference to
these characteristics in the hope that this understanding
will assist the experimentalist with properly interpreting
laboratory measurements.
3.1.1 The Building Blocks of the Theory
of Viscoelasticity
Forces are subject to the laws of Newtonian mechanics, and are, accordingly, governed by the classical laws
of motion. While relativistic effects have been studied in connection with deforming solids, such concerns
are suppressed in the present context. Many texts deal
with Newtonian mechanics to various degrees of sophistication so that only a statement of the necessary
terminology is required for the present purposes. In the
interest of brevity we thus dispense with a detailed presentation of the analysis of stress and of the analysis of
strain, except for summarizing notational conventions
and defining certain variables commonly understood in
the context of the linear theory of elasticity. We adhere
to the common notation of the Greek letters τ and ε denoting stress and strain, respectively. Repeated indices
on components imply summation; identical subscripts
(e.g., τ11 ) denote normal components and different ones
shear (e.g., τ12 ). The dilatational components of stress,
τii , are often written as σkk , with the strain complement being εkk . Because the viscoelastic constitutive
description is readily expressed in terms of deviatoric
and dilatational components, it is necessary to recall the
components Sij of the deviatoric stress as
1
Sij = τij − τkk · δij ,
3
(3.1)
where δij denotes the Kronecker operator. Similarly, the
corresponding deviatoric strain e is written in compo-
Mechanics of Polymers: Viscoelasticity
nent form as
1
eij = εij − εkk · δij .
(3.2)
3
For further definitions and derivations of measures
of stress or strain the reader is referred to typical texts.
3.2 Linear Viscoelasticity
51
The remaining building block of the theory consists
of the constitutive behavior, which differentiates viscoelastic materials from elastic ones. The next section
is devoted to a brief definition of linearly viscoelastic
material behavior.
3.2 Linear Viscoelasticity
face (boundary) of a viscoelastic solid. Specification of
such a quantity under uniaxial relaxation is not particularly useful, except to note that in the limit of short
(glassy) response its value is a limit constant, and also
under long-term conditions when the equilibrium (or
rubbery) modulus is effective, in which case the Poisson’s ratio is very close to 0.5 (incompressibility).
3.2.1 A Simple Linear Concept:
Response to a Step-Function Input
It is convenient for instructional purposes to consider
that the stress can be described, so that the strain follows from the stress. The reverse may hold with equal
validity. In general, of course, neither may be prescribed
a priori, and a general connection relates them. The
structure of the linear theory must be completely symmetric in the sense that the mathematical formulation
applies to these relations regardless of which variable is
considered the prescribed or the derived one. For introductory purposes we shall use, therefore, the concept of
a cause c(t) (input) and an effect e(t) (output) that are
connected by a functional relationship. The latter must
be linear with respect to (a) the amplitude (additivity
with respect to magnitude) and (b) time in the sense that
they obey additivity independent of time.
It is primarily a matter of convenience that the
cause-and-effect relation is typically expressed with the
aid of a step-function cause. Other representations are
Table 3.1 Nomenclature for viscoelastic material functions
Type of loading
Shear
Bulk
Uniaxial
extension
μ(t)
J(t)
μ (ω)
μ (ω)
J (ω)
J (ω)
K (t)
M(t)
K (ω)
K (ω)
M (ω)
M (ω)
E(t)
D(t)
E (ω)
E (ω)
D (ω)
D (ω)
Mode
Quasistatic
Relaxation
Creep
Strain prescribed
Harmonic
Stress prescribed
Storage
Loss
Storage
Loss
Part A 3.2
The framework for describing linearly viscoelastic
material behavior, as used effectively for engineering applications, is phenomenological. It is based
mathematically on either an integral or differential formulation with the material representation described
realistically in numerical (tabular) or functional form(s).
The fundamental equations governing the linearized
theory of viscoelasticity are the same as those for
the linearized theory of elasticity, except that the
generalized Hooke’s law of elasticity is replaced by
a constitutive description that is sensitive to the material’s (past) history of loading or deformation. It will be
the purpose of the immediately subsequent subsections
to summarize this formalism of material description in
preparation for various forms of material characterization. Little or no reference is made to general solution
methods for viscoelastic boundary value problems. For
this purpose the reader is referred to the few texts available as listed in Sect. 3.6.1.
Rather than repeating the theory as already outlined
closely in [3.13] we summarize below the concepts
and equations most necessary for experimental work; if
necessary, the reader may consult the initially cited reference(s) (Sect. 3.6.1) for a more expansive treatment.
In brief, the viscoelastic material functions of first-order
interest are given in Table 3.1.
Note the absence of a generic viscoelastic Poisson
function, because that particular response is a functional
of the deformation or stress history applied to the sur-
52
Part A
Solid Mechanics Topics
Part A 3.2
feasible and we shall address a common one (steadystate harmonic) later on as a special case. For now,
let E(t, t1 ) represent a time-dependent effect that results from a step cause c(t1 ) = h(t1 ) of unit amplitude
imposed at time t1 ; h(t1 ) denotes the Heaviside step
function applied at time t1 .
For the present we are concerned only with nonaging materials, i. e. with materials, the intrinsic properties of which do not change with time. (With this
definition in mind it is clear that the nomenclature timedependent materials in place of viscoelastic materials is
really a misnomer; but that terminology is widely used,
nevertheless.) We can assert then that for a non-aging
material any linearity of operation, or relation between
an effect and its cause, requires satisfaction of
Postulate (a): proportionality with respect to amplitude,
and
Postulate (b): additivity of effects independent of the
time sequence, when the corresponding
causes are added, regardless of the respective application times.
Condition (a) states that, if the cause c(0) elicits E(t, 0), then a cause of different amplitude, say
c1 (0) ≡ α · h(0), with α a constant, elicits a response
α · E(t, 0). Under the non-aging restriction this relation
is to be independent of the time when the cause starts
to act, so that c1 (t1 ) ≡ α · h(t1 ) → αE(t, t1 ); t > t1 also
holds. This means simply that the response–effect relation shown in the upper part of Fig. 3.1 holds also
for a different time t2 , which occurs later in time
than t1 .
Condition (b) entails then that, if two causes
c1 (t1 ) ≡ α1 · h(t1 ) and c2 (t2 ) ≡ α2 · h(t2 ), imposed at
different times t1 and, t2 act jointly, then their corresponding effects α1 · E(t, t1 ) and α2 · E(t, t2 ) is their sum
while observing their proper time sequence. Let the
common time scale start at t = 0; then the combined
effect, say e(t), is expressed by
c(t) ≡ c1 (t1 ) + c2 (t2 ) → e(t) = α1 · E(t − t1 )
+ α1 · E(t − t2 ) .
(3.3)
Specifically, here the first response does not start until
the time t1 is reached, and the response due to the second cause is not experienced until time t2 , as illustrated
in Fig. 3.1.
Having established the addition process for two
causes and their responses, the extension to an arbitrary
number of discrete step causes is clearly recognized as
a corresponding sum for the collective effects e(tn ), up
to time t, in the generalized form of (3.3), namely
(3.4)
e(t) =
αn E(t − tn ) ; (tn < t) .
This result may be further generalized for causes
represented by a continuous cause function of time,
say c(t). To this end consider a continuously varying function c(t) decomposed into an initially discrete
approximation of steps of finite (small) amplitudes.
With the intent of ultimately proceeding to the limit of
infinitesimal steps, note that the amplitude of an individual step amplitude at, say, time τn is given by
(3.5)
αn → Δc(τn ) = (Δc/Δτ) Δτ ,
τn
Stress
which, when substituted into (3.4), leads to
e(t) =
E(t − tn )(Δc/Δτ) Δτ .
Strain
τn
t1
Time
Stress
t1
Time
Strain
In the limit n → ∞ (Δτ → dτ), the sum
Δc e(t) = lim
E(t − tn )
Δτ ,
Δτ τn
(3.7)
passes over into the integral
2
t
2
1
(3.6)
e(t) =
1
E(t − τ)
dc(τ)
dτ .
dτ
(3.8)
0
t1
t2
Time
t1
t2
Time
Fig. 3.1 Additivity of prescribed stress steps and corres-
ponding addition of responses
Inasmuch as this expression can contain the effect of
a step-function contribution at zero time of magnitude
c(0), this fact can be expressed explicitly through the
Mechanics of Polymers: Viscoelasticity
alternate notation
3.2 Linear Viscoelasticity
53
effect, one obtains the inverse relation(s)
t
e(t) = c(0)E(t) +
E(t − τ)
0+
dc(τ)
dτ ,
dτ
(3.9)
3.2.2 Specific Constitutive Responses
(Isotropic Solids)
For illustrative purposes and to keep the discussion
within limits, the following considerations are limited to
isotropic materials. Recalling that the stress and strain
states may be decomposed into shear and dilatational
contributions (deviatoric and dilatational components),
we deal first with the shear response followed by the
volumetric part. Thermal characterization will then be
dealt with subsequently.
Shear Response
Let τ denote any shear stress component and ε its
corresponding shear strain. Consider ε to be the cause
and τ its effect. Denote the material characteristic E(t)
for unit step excitation from Sect. 3.2.1 in the present
shear context by μ(t). This function will be henceforth
identified as the relaxation modulus in shear (for an
isotropic material). It follows then from (3.8) and (3.9)
that
t
dε(ξ)
(3.10)
dξ
τ(t) = 2 μ(t − ξ)
dξ
0
t
= 2ε(0)μ(t) + 2
0+
μ(t − ξ)
dε(ξ)
dξ .
dξ
(3.11)
The factor of 2 in the shear response is consistent with
elasticity theory, inasmuch as in the limits of short- and
long-term behavior all viscoelasticity relations must revert to the elastic counterparts.
If one interchanges the cause and effect by letting
the shear stress represent the cause, and the strain the
t
J(t − ξ)
dτ
dξ
dξ
(3.12)
0
t
1
1
= τ(0)J(t) +
2
2
J(t − ξ)
0+
dτ
dξ ,
dξ
(3.13)
where now the function E ≡ J(t) is called the shear
creep compliance, which represents the creep response
of the material in shear under application of a step shear
stress of unit magnitude as the cause.
Bulk or Dilatation Response
Let εii (t) represent the first strain invariant and σ jj (t) the
corresponding stress invariant. The latter is recognized
as three times the pressure P(t), i. e., σ jj (t) ≡ 3P(t). In
completely analogous fashion to (3.12) and (3.13) the
bulk behavior, governed by the bulk relaxation modulus
K (t) ≡ E(t), is represented by
t
σ jj = 3
K (t − ξ)
dεii (ξ)
dξ
dξ
(3.14)
0
t
= 3εii (0)K (t) + 3
K (t − ξ)
0+
dεii (ξ)
dξii .
dξ
(3.15)
Similarly, one writes the inverse relation as
1
εii =
3
t
M(t − ξ)
dσ jj (ξ)
dξ
dξ
(3.16)
0
1
1
= σ jj (0)M(t) +
3
3
t
M(t − ξ)
0+
dσ jj (ξ)
dξii ,
dξ
(3.17)
where the function M(t) ≡ E(t) represents now the dilatational creep compliance (or bulk creep compliance);
in physical terms, this is the time-dependent fractional
volume change resulting from the imposition of a unit
step pressure.
3.2.3 Mathematical Representation
of the Relaxation and Creep Functions
Various mathematical forms have been suggested and
used to represent the material property functions
Part A 3.2
where the lower integral limit 0+ merely indicates that
the integration starts at infinitesimally positive time so
as to exclude the discontinuity at zero. Alternatively, the
same result follows from observing that for a step discontinuity in c(t) the derivative in (3.5) is represented by
the Dirac delta function δ(t). In fact, this latter remark
holds for any jump discontinuity in c(t) at any time, after and including any at t = 0. In mathematical terms
this form is recognized as a convolution integral, which
in the context of the dynamic (vibration) response of
linear systems is also known as the Duhamel integral.
1
ε(t) =
2
54
Part A
Solid Mechanics Topics
Part A 3.2
analytically. Preferred forms have evolved, with precision being balanced against ease of mathematical
use or a minimum number of parameters required.
All viscoelastic material functions possess the common characteristic that they vary monotonically with
time: relaxation functions decreasing and creep functions increasing monotonically. A second characteristic
of realistic material behavior is that time is (almost)
invariably measured in terms of (base 10) logarithmic
units of time. Thus changes in viscoelastic response
may appear to be minor when considered as a function of the real time, but substantial if viewed against
a logarithmic time scale.
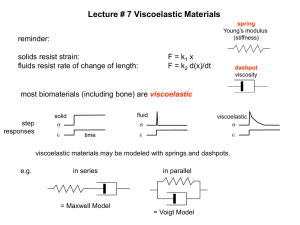
Early representations of viscoelastic responses were
closely allied with (simple) mechanical analog models (Kelvin, Voigt) or their derivatives. Without delving
into the details of this evolutionary process, their generalization to broader time frames led to the spectral
representation of viscoelastic properties, so that it is
useful to present only the rudiments of that development. The building blocks of the analog models
are the Maxwell and the Voigt models illustrated in
Fig. 3.2a,b. In this modeling a mechanical force F
corresponds to the shear stress τ and, similarly, a displacement/deflection δ corresponds to a strain ε. Under
a stepwise applied deformation of magnitude ε0 – separating the force-application points in the Maxwell
model – the stress (force) abates or relaxes by the
relation
τ(t) = ε0 μm exp(−t/ξ) ,
F
a)
b)
(3.18)
c)
F
μ
μ
η
η
μ1
η1
μ2
η2
μ3
η3
F
F
F
d)
μ∞
F
μ1
μ2
μ3
μj
η1
η2
η3
ηj
F
where ξ = ηm /μm is called the (single) relaxation time.
Similarly, applying a step stress (force) of magnitude
to the Voigt element engenders a time-dependent separation (strain) of the force-application points described
by
τ0
[1 − exp(−t/ς)] ,
(3.19)
ε(t) =
μν
where ς = ην /μν is now called the retardation time
since it governs the rate of retarded or delayed motion.
Note that this representation is used for illustration purposes here and that the retardation time for the Voigt
material is not necessarily meant to be equal to the
relaxation time of the Maxwell solid. It can also be
easily shown that this is not true for a standard linear solid either. By inductive reasoning, that statement
holds for arbitrarily complex analog models. The relaxation modulus and creep compliance commensurate
with (3.18) (Maxwell model) and (3.19) (Voigt model)
for the Wiechert and Kelvin models (Fig. 3.2c,d) are,
respectively
μn exp(−t/ξn )
(3.20)
μ(t) = μ∞ +
n
and
J(t) = Jg +
Jn [1 − exp(−t/ςn )] + η0 t ,
where Jg and η0 arise from letting η1 → 0 (the first
Voigt element degenerates to a spring) and μn → 0 (the
last Voigt element degenerates to a dashpot). These series representations with exponentials are often referred
to as Prony series.
As the number of relaxation times increases indefinitely, the generalization of the expression for the shear
relaxation modulus, becomes
∞
dξ
(3.22)
,
μ(t) = μ∞ + H (ξ) exp(−t/ξ)
ξ
0
where the function H (ξ) is called the distribution function of the relaxation times, or relaxation spectrum, for
short; the creep counterpart presents itself with the help
of the retardation spectrum L(ζ ) as
∞
μj
ηj
J(t) = Jg +
L(ζ )[1 − exp(−t/ζ )]
0
F
Fig. 3.2a–d Mechanical analogue models: (a) Maxwell,
(b) Voigt, (c) Wiechert, and (d) Kelvin
(3.21)
n
dζ
+ ηt ,
ζ
(3.23)
Note that although the relaxation times ξ and the retardation times ζ do not, strictly speaking, extend over the
range from zero to infinity, the integration limits are so
Mechanics of Polymers: Viscoelasticity
3.2 Linear Viscoelasticity
assigned for convenience since the functions H and L
can always be chosen to be zero in the corresponding
part of the infinite range.
3.2.5 Spectral and Functional
Representations
3.2.4 General Constitutive Law for Linear
and Isotropic Solid: Poisson Effect
A discrete relaxation spectrum in the form
H (ξ) =
μn ξn δ(ξn ) ,
One combines the shear and bulk behavior exemplified in (3.13), (3.16) and (3.19), (3.20) into the general
stress–strain relation
t 2
∂εkk
K (t − τ) − μ(t − τ)
dτ
σij (t) = δij
3
∂τ
t
+2
0−
μ(t − τ)
∂εij
dτ ,
∂τ
(3.24)
where δij is again the Kronecker delta.
Poisson Contraction
A recurring and important parameter in linear elasticity is Poisson’s ratio. It characterizes the contraction/expansion behavior of the solid in a uniaxial stress
state, and is an almost essential parameter for deriving
other material constants such as the Young’s, shear or
bulk modulus from each other. For viscoelastic solids
the equivalent behavior cannot in general be characterized by a constant; instead, the material equivalent
to the elastic Poisson’s ratio is also a time-dependent
function, which is a functional of the stress (strain)
history imposed on a uniaxially stressed material sample. This time-dependent function covers basically the
same (long) time scale as the other viscoelastic responses and is typically measured in terms of 10–20
decades of time at any one temperature. However, compared to these other functions, its value changes usually
from a maximum value of 0.35 or 0.4 at the short
end of the time spectrum to 0.5 for the long time
frame. Several approximations are useful. In the nearglassy domain (short times) its value can be taken as
a constant equal to that derived from measurements
well below the glass-transition temperature. In the long
time range for essentially rubber-like behavior the approximation of 0.5 is appropriate, though not if one
wishes to convert shear or Young’s data to bulk behavior, in which case small deviations from this value
can play a very significant role. If knowledge in the
range between the (near-)glassy and (near-)rubbery domain are required, neither of the two limit constants
are strictly appropriate and careful measurements are
required [3.14–16].
(3.25)
where δ(ξn ) represents the Dirac delta function, clearly
leads to the series representation (3.20) and can trace
the modulus function arbitrarily well by choosing the
number of terms in the series to be sufficiently large;
a choice of numbers of terms equal to or larger
than twice the number of decades of the transition
is often desirable. For a history of procedures to
determine the coefficients μn see the works by Hopkins and Hamming [3.17], Schapery [3.18], Clauser
and Knauss [3.19], Hedstrom et al. [3.20], Emri and
Tschoegl [3.21–26], and Emri et al. [3.27, 28], all of
which battle the ill-conditioned nature of the numerical
determination process. This fact may result in physically inadmissible, negative values (energy generation),
though the overall response function may be rendered
very well. A more recent development that largely
circumvents such problems, is based on the trust region concept [3.29], which has been incorporated into
MATLAB, thus providing a relatively fast and readily available procedure. The numerical determination of
these coefficients occurs through an ill-conditioned integral or matrix and is not free of potentially large errors
in the coefficients, including physically inadmissible
negative values, though the overall response function
may be rendered very well.
Although expressions as given in (3.22) and (3.23)
render complete descriptions of the relaxation or creep
behavior once H (ξ) or L(ξ) are determined for any
material in general, simple approximate representations
can fulfill a useful purpose. Thus, the special function
μ0 − μ∞ ξ0 n
exp(−ξ0 /ξ)
(3.26)
H (ξ) =
Γ (n)
ξ
with the four parameters μ0 , μ∞ , ξ0 , and n representing
material constants, where Γ (n) is the gamma function,
leads to the power-law representation for the relaxation
response
μ(t) = μ∞ +
μ0 − μ∞
.
(1 + t/ξ0 )n
(3.27)
This equation is represented in Fig. 3.3 for the parameter values μ∞ = 102 , μ0 = 105 , ξ0 = 10−4 , and
n = 0.35. It follows quickly from (3.22) and the figure that μ0 represents the modulus as t → 0, and μ∞
Part A 3.2
0−
55
56
Part A
Solid Mechanics Topics
3.2.6 Special Stress or Strain Histories
Related to Material Characterization
log modulus
6
For the purposes of measuring viscoelastic properties in
the laboratory we consider several examples in terms of
shear states of stress and strain. Extensional or compression properties follow totally analogous descriptions.
5
4
3
2
Part A 3.2
1
–10
–5
0
5
10
log t
Fig. 3.3 Example of the power-law representation of a relaxation modulus
its behavior as μ(t → ∞); ξ0 locates the central part
of the transition region and n the (negative) slope. It
bears pointing out that, while this functional representation conveys the generally observed behavior of the
relaxation phenomenon, it usually serves only in an approximate manner: the short- and long-term modulus
limits along with the position along the log-time axis
and the slope in the mid-section can be readily adjusted
through the four material parameters, but it is usually
a matter of luck (and rarely possible) to also represent
the proper curvature in the transitions from short- and
long-term behavior. Nevertheless, functions of the type
(3.26) or (3.27) can be very useful in capturing the essential features of a problem. With respect to fracture
Schapery draws heavily on the simplified power-law
representation.
An alternative representation of one-dimensional
viscoelastic behavior (shear or extension), though not
accessed through a distribution function of the type
described above, is the so-called stretch exponential
formulation; it is often used in the polymer physics
community and was introduced for torsional relaxation
by Kohlrausch [3.30] and reintroduced for dielectric
studies by Williams and Watts [3.31]. It is, therefore, often referred to as the KWW representation.
In the case of relaxation behavior it takes the form
(with the addition of the long-term equilibrium modulus μ∞ ),
μ(t) = μ∞ + μ0 exp −(t/ξ0 )β .
Unidimensional Stress State
We call a stress or strain state unidimensional when it
involves only one controlled or primary displacement
or stress component, as in pure shear or unidirectional
extension/compression. Typical engineering characterizations of materials occur by means of uniaxial
(tension) tests. We insert here a cautionary note with
respect to laboratory practices. In contrast to working
with metallic specimens, clamping polymers typically
introduces complications that are not necessarily totally resolvable in terms of linear viscoelasticity. For
example, clamping a tensile specimen in a standard
test machine with serrated compression claps introduces a nonlinear material response such that, during
the course of a test, relaxation or creep may occur under the clamps. Sometimes an effort is made to alleviate
this problem by gluing metal tabs to the end of specimens, only to introduce the potential of the glue line
to contribute to the overall relaxation or deformation.
If the contribution of the glue line to the deformation
is judged to be small, an estimate of its effect may be
derived with the help of linear viscoelasticity, and this
should be stated in reporting the data.
For rate-insensitive materials the pertinent property
is Young’s modulus E. For viscoelastic solids this constant is supplanted by the uniaxial relaxation modulus
E(t) and its inverse, the uniaxial creep compliance D(t).
Although the general constitutive relation (3.24) can
be written for the uniaxial stress state (σ11 (t) = σ0 (t),
say, σ22 = σ33 = 0), the resulting relation for the uniaxial stress is an integral equation for the stress or
strain ε11 (t), involving the relaxation moduli in shear
and dilatation. In view of the difficulties associated with
determining the bulk response, it is not customary to follow this interconversion path, but to work directly with
the uniaxial relaxation modulus E(t) and/or its inverse,
the uniaxial creep compliance D(t). Thus, if σ11 (t) is
the uniaxial stress and ε11 (t) the corresponding strain,
one writes, similar to (3.10) and (3.12),
(3.28)
Further observations and references relating to this
representation are delineated in [3.13].
t
σ11 (t) = ε11 (0)E(t) +
0+
E(t − ξ)
dε11 (ξ)
dξ
dξ
Mechanics of Polymers: Viscoelasticity
ε
ε
ε0
t0
+
t0
t
t0
t
t
modulus (3.22) together with the convolution relation
(3.10) to render, with ε̇(t) = const = ε̇0 and ε(0) = 0, the
general result
t
0+
We insert here a cautionary note with respect to
laboratory practices: In contrast to working with metallic specimens, clamping polymers typically introduces
complications that are not necessarily totally resolvable
in terms of linear viscoelasticity. For example, clamping
a tensile specimen in a standard test machine with serrated compression clamps introduces nonlinear material
response such that during the course of a test relaxation or creep may occur under the clamps. Sometimes
an effort is made to alleviate this problem by gluing
metal tabs to the end of specimens, only to introduce
the potential of the glue-line to contribute to the overall relaxation or deformation. If the contribution of the
glue-line to the deformation is judged to be small an estimate of its effect may be derived with the help of linear
viscoelasticity, and such should be stated in reporting
the data.
Constant-Strain-Rate History. A common test method
for material characterization involves the prescription of
a constant deformation rate such that the strain increases
linearly with time (small deformations). Without loss
of generality we make use of a shear strain history in
the form ε(t) = ε̇0 t (≡ 0 for t ≤ 0, ε̇0 = const for t ≥ 0)
and employ the general representation for the relaxation
τ
µ (t)
Error
ε0
t0
t
t0
t
Fig. 3.5 Difference in relaxation response resulting from
step and ramp strain history
μ(t − ξ)ε̇0 dξ
τ(t) = 2
0
t
= 2ε̇0
∞
μ∞ +
0
H (ς) exp −
0
t − ξ dς
du
ς
ς
(3.29)
t
= 2με̇0
μ(u) du = 2ε̇0 t ·
0
1
t
t
μ(u) du
0
= 2ε(t)μ̄(t) ; t − ξ ≡ u .
(3.30)
t
Here μ̄(t) = 1t 0 μ(u) du is recognized as the relaxation
modulus averaged over the past time (the time-averaged
relaxation modulus).
Ramp Strain History. A recurring question in viscoelas-
tic material characterization arises when step functions
are called for analytically but cannot be supplied experimentally because equipment response is too slow
or dynamic (inertial) equipment vibrations disturb the
input signal: In such situations one needs to determine
the error if the response to a ramp history is supplied
instead of a step function with the ramp time being t0 .
To provide an answer, take explicit recourse to postulate (b) in Sect. 3.2.1 in connection with (3.29)/(3.30)
to evaluate (additively) the latter for the strain histories
shown in Fig. 3.4. To arrive at an approximate result as
a quantitative guide, let us use the power-law representation (3.27) for the relaxation modulus. Making use of
Taylor series approximations of the resulting functions
for t 0 one arrives at (the derivation is lengthy though
straightforward)
n t0 /ξ0
τ(t)
= μ(t) 1 +
(3.31)
+...
2ε0
2 (1 + t/ξ0 )
Part A 3.2
and the inverse relation as
t
dσ11 (ξ)
ε11 (t) = σ11 (0)D(t) + D(t − ξ)
dξ .
dξ
ε
57
Fig. 3.4 Superposition of linear functions to generate a ramp
ε
=
3.2 Linear Viscoelasticity
58
Part A
Solid Mechanics Topics
Part A 3.2
as long as μ∞ can be neglected relative to μ0 (usually
on the order of 100–1000 times smaller). The derivation is lengthy though straightforward. The expression
in the square brackets contains the time-dependent error
by which the ramp response differs from the ideal relaxation modulus, as illustrated in Fig. 3.5, which tends to
zero as time grows without limit beyond t0 .
By way of example, if n = 1/2 and an error in the
relaxation modulus of maximally 5% is acceptable, this
condition can be met by recording data only for times
larger than t/t0 = 5 − ς0 /t0 . Since ς0 /t0 is always positive the relaxation modulus is within about 5% of the
ramp-induced measurement as long as one discounts
data taken before 5t0 . To be on the safe side, one typically dismisses data for an initial time interval equal to
ten times the ramp rise time.
In case the time penalty for the dismissal of that
time range is too severe, methods have been devised
that allow for incorporation of this earlier ramp data
as delineated in [3.32, 33]. On the other hand, the wide
availability of computational power makes an additional
data reduction scheme available: Using a Prony series (discrete spectrum) representation, one evaluates
the constant-strain-rate response with the aid of (3.30),
leaving the individual values of the spectral lines as unknowns. With regard to the relaxation times one has two
options:
(a) one leaves them also as unknowns, or
(b) one fixes them such that they are one or two per
decade apart over the whole range of the measurements.
The second option (b) is the easier/faster one and provides essentially the same precision of representation
as option (a). After this choice has been made, one fits
the analytical expression with the aid of Matlab to the
measurement results. Matlab will handle either cases (a)
or (b). There may be issues involving possible dynamic
overshoots in the rate-transition region, because a test
machine is not able to (sufficiently faithfully) duplicate
the rapid change in rate transition from constant to zero
rate, unless the initial rate is very low. This discrepancy
is, however, considerably smaller that that associated
with replacing a ramp loading for a step history.
Mixed Uniaxial Deformation/Stress Histories
Material parameters from measured relaxation or creep
data are typically extracted via Volterra integral equations of the first kind, i. e., of the type of (3.20)
or (3.21). A problem arises because these equations
are ill-posed in the sense that the determination of
the kernel (material) functions from modulus or creep
data involving Volterra equations of the first kind
can lead to sizeable errors, whether the functions
are sought in closed form or chosen in spectral or
discrete (Prony series) form [3.18, 19, 27]. On the
other hand, Volterra equations of the second kind do
not suffer from this mathematical inversion instability
(well-posed problem). Accordingly, we briefly present
an experimental arrangement that alleviates this inherent difficulty [3.28]. At the same time, this particular
scheme also allows the simultaneous determination
of both the relaxation and creep properties, thus circumventing the calculation of one from the other. In
addition, the resulting data provides the possibility of
a check on the linearity of the viscoelastic data through
a standard evaluation of a convolution integral.
Relaxation and/or creep functions can be determined from an experimental arrangement that incorporates a linearly elastic spring of spring constant ks
as illustrated in Fig. 3.6, readily illustrated in terms of
a tensile situation. The following is, however, subject
to the assumption that the elastic deformations of the
test frame and/or the load cell are small compared to
those of the specimen and the deformation of the added
spring. If the high stiffness of the material does not
warrant that assumption it is necessary to determine
the contribution of the testing machine and incorporate it into the stiffness ks . Similar relations apply for
a shear stress/deformation arrangement. In the case of
lb
Δl b0
ls
ls
Δl
Δl s0
Fig. 3.6 Arrangement for multiple material properties de-
termination via a single test
Mechanics of Polymers: Viscoelasticity
bulk/volume response the spring could be replaced by
a compressible liquid, though this possibility has not
been tested in the laboratory, to our knowledge. For
a suddenly applied gross extension (compression) of the
spring by an amount Δl = const, both the bar and the
spring will change lengths according to
Δlb (t) + Δls (t) = Δl ,
(3.32)
where the notation in Fig. 3.6 is employed (subscript
‘b’ refers to the bar and “s” to the spring). The correspondingly changing stress (force) in the bar is given
by
(3.33)
which is also determined by
Fb (t) =
Ab
lb
t
E(t − ξ)
d
[Δlb (ξ)] dξ
dξ
0
Ab 0
Δl E(t) ,
+
lb b
(3.34)
which, together with (3.32), renders upon simple
manipulation
Ab
Δlb (t)
+
εb (0)E(t)
Δl
ks Δl
t
E(t − ξ)
+
d
[εb (ξ)] dξ = 1 .
dξ
(3.35)
0
This is a Volterra integral equation of the second kind,
as can be readily shown by the transformation of variables ξ = t − u; it is well behaved for determining the
relaxation function E(t).
By measuring Δlb (t) along with the other parameters in this equation, one determines the relaxation
modulus E(t).
Similarly, one can cast this force equilibrium equation in terms of the creep compliance of the material and
the force in the spring as
ks lb
Fb (t) +
Ab
t
D(t − ξ)
d
[Fb (ξ)] dξ
dξ
0
Time-Harmonic Deformation
A frequently employed characterization of viscoelastic
materials is achieved through sinusoidal strain histories
of frequency ω. Historically, this type of material characterization refers to dynamic properties, because they
are measured with moving parts as opposed to methods
leading to quasi-static relaxation or creep. However, in
the context of mechanics dynamic is reserved for situations involving inertia (wave) effects. For this reason,
we replace in the sequel the traditional dynamic (properties) with harmonic, signifying sinusoidal. Whether one
asks for the response from a strain history that varies
with sin(ωt) or cos(ωt) may be accomplished by dealing
with the (mathematically) complex counterpart
ε(t) = ε0 exp(iωt) · h(t)
0
(3.36)
It is clear then that, if both deformations and the stress
in the bar are measured, both the relaxation modulus
(3.38)
so that after the final statement has been obtained one
would be interested, correspondingly in either the real
or the imaginary part of the result. Here h(t) is again
the Heaviside step function, according to which the real
part of the strain history represents a step at zero time
with amplitude ε0 . The evaluation of the appropriate response may be accomplished with the general modulus
representation so that substitution of (3.22) and (3.38)
into (3.12) or (3.13) renders, after an interchange in the
order of integration,
∞
dς
τ(t) = 2ε0 μ∞ + H (ς) exp(−t/ς)
ς
t
t −ξ
+ 2ε0 iω H (ς)
exp −
ς
0
0
dς
× exp(iωξ) dξ
ς
∞
0
+ Fb (0)D(t) = ks Δl .
and the creep compliance can be determined and the
determination of the Prony series parameters proceeds
without difficulty [3.21–26]
The additional inherent characteristic of this (hybrid) experimental–computational approach is that it
may be used for determining the limit of linearly viscoelastic behavior of the material. By determining the
two material functions of creep and relaxation simultaneously one can examine whether the determined
functions satisfy the essential linearity constraint, see
(3.62)–(3.64)
t
D(t − ξ)E(ξ) dξ = t .
(3.37)
59
Part A 3.2
Fb (t) = Fs (t) = kb (t)Δls (t) = ks [Δl − Δlb (t)] ,
3.2 Linear Viscoelasticity
60
Part A
Solid Mechanics Topics
t
+ 2ε0 iωμ∞
exp(iωξ) dξ ,
(3.39)
0
which ultimately leads to
τ(t) = 2ε0 [μ(t) − μ∞ ]
∞
iωH (ς)
− 2ε0
exp(−t/ς) dς
1 + iως
0
∞
iωH (ς)
dς .
+ 2ε(t) μ∞ +
1 + iως
(3.40)
Part A 3.2
0
The first two terms are transient in nature and (eventually) die out, while the third term represents the
steady-state response.
For the interpretation of measurements it is important to appreciate the influence of the transient terms on
the measurements. Even though a standard linear solid,
represented by the spring–dashpot analog in Fig. 3.7
does not reflect the full spectral range of engineering
materials, it provides a simple demonstration for the decay of the transient terms. Its relaxation modulus (in
shear, for example) is given by
μ(t) = μ∞ + μs exp(−t/ζ0 ) ,
(3.41)
where ζ0 denotes the relaxation time and μ∞ and μs
are modulus parameters. Using the imaginary part of
(3.40) corresponding to the start-up deformation history
ε(t) = ε0 sin(ωt)h(t) one finds for the corresponding
stress history
ωζ0
μs
τ(t)
=R=
(cos ωt + ωζ0 sin ωt)
2μ∞ ε0
μ∞ 1 + ω2 ζ02
ωζ0
μs
e−t/ζn .
(3.42)
−
μ∞ 1 + ω2 ζ02
F
μ
η
μ0
F
The last term is the transient. An exemplary presentation with μs /μ∞ = 5, ωζ0 = 1, and ζ0 = 20 is shown
in Fig. 3.8. For longer relaxation times the decay lasts
longer; for shorter ones the converse is true. One readily
establishes that in this example the decay is (exponentially) complete after four to five times the relaxation
time. The implication for real materials with very long
relaxation times deserves extended attention. The expression for the standard linear solid can be generalized
by replacing (3.41) with the corresponding Prony series
representation.
1 ωζn μn
τ(t)
=
(cos ωt + ωζn sin ωt)
2μ∞ ε0
μ∞ n 1 + ω2 ζn2
1 ωζn μn −t/ζn0
e
.
(3.43)
−
μ∞ n 1 + ω2 ζn2
Upon noting that the fractions in the last term sum do
not exceed μn /2 one can bound the second sum by
1 ωζn μn −t/ζn0
e
μ∞ n 1 + ω2 ζn2
1 1 μ(t)
−t/ζn0
≤
μn e
=
−1 .
(3.44)
2μ∞ n
2 μ∞
This expression tends to zero only when t → ∞, a time
frame that is, from an experimental point of view, too
long in most instances. For relatively short times that
fall into the transition range, the ratio of moduli is not
small, as it can be on the order of 10 or 100, or even
larger. There are, however, situations for which this error can be managed, and these correspond to those cases
when the relaxation modulus changes very slowly during the time while sinusoidal measurements are being
R
6
5
4
3
2
1
0
–1
–2
–3
–4
–5
–6
0
20
40
60
80
100
120 140 160
Normalized time
Fig. 3.7 Standard
Fig. 3.8 Transient start-up behavior of a standard linear
linear solid
solid under ε(t) = h(t) sin(ωt)
Mechanics of Polymers: Viscoelasticity
τ(t)
= μ∞ +
2ε(t)
∞
0
iωH (ς)
dς .
1 + iως
Both the strain ε(t) and the right-hand side are complex
numbers. One calls
μ∗ (ω) ≡ μ∞ +
∞
0
iωH (ς)
dς
1 + iως
Stress:
(3.46)
τ (t)
sin[ωt +Δ(ω)]
2ε0 μ(ω)
Strain:
1
the complex modulus μ∗ = μ (ω) + iμ (ω) with its real
and imaginary parts defined by
∞
(ως)2
μ (ω) = μ∞ +
H (ς) dς
(3.47)
1 + (ως)2
0
(the storage modulus) and
∞
ως
μ (ω) =
H (ς) dς
1 + (ως)2
(3.48)
0
(the loss modulus), respectively.
Polar representation allows the shorthand notation
μ∗ = μ(ω) exp[iΔ(ω)] ,
(3.49)
where
μ (ω)
and
μ (ω)
μ(ω) ≡ |μ∗ (ω)| = [μ (ω)]2 + [μ (ω)]2 ,
tan Δ(ω) =
(3.50)
so that, also
μ (ω) = μ(ω) cos Δ(ω) and
μ (ω) = μ(ω) sin Δ(ω) .
(3.51)
The complex stress response (3.45) can then be written,
using (3.50), as
τ(t) = 2ε(t)μ∗ (ω) = 2ε0 exp(iωt)μ(ω) exp[iΔ(ω)] ,
(3.52)
(3.45)
ε (t)
= sin ωt
ε0
t
Δω
Fig. 3.9 Illustration of the frequency-dependent phase
shift between the applied strain and the resulting stress
61
which may be separated into its real or imaginary part
according to
τ(t) = 2ε0 μ(ω) cos[ωt + Δ(ω)] and
τ(t) = 2ε0 μ(ω) sin[ωt + Δ(ω)] .
(3.53)
Thus the effect of the viscoelastic material properties
is to make the strain lag behind the stress (the strain is
retarded) as illustrated in Fig. 3.9. It is easy to verify
that the high- and low-frequency limits of the steadystate response are given by μ∗ (ω → ∞) = μ(t → 0) =
μ0 , the glassy response, and μ∗ (ω → 0) = μ(t → ∞) =
μ∞ , as the long-term or rubbery response (real).
An Example for a Standard Linear Solid. For the stan-
dard linear solid (Fig. 3.7) the steady-state portion of the
response (3.52) simplifies to
ω2 ς02
,
μ (ω) = μ∞ + μs
1 + ω2 ς02
ως0
μ (ω) = μs
,
(3.54)
1 + ω2 ς02
ως0
tan Δ(ω) =
. (3.55)
μ∞ /μs + (1 + μ∞ /μs )(ως0 )2
Part A 3.2
made. This situation arises when the material is near
its glassy state or when it approaches rubbery behavior.
As long as the modulus ratio can be considered nearly
constant in the test period, the error simply offsets the
test results by additive constant values that may be subtracted from the data. Clearly, that proposition does not
hold when the material interrogation occurs around the
middle of the transition range.
There are many measurements being made with
commercially available test equipment, when frequency
scans or relatively short time blocks of different frequencies are applied to a test specimen at a set
temperature, or while the specimen temperature is being changed continuously. In these situations the data
reduction customarily does not recognize the transient
nature of the measurements and caution is required so as
not to interpret the results without further examination.
Because viscoelastic materials dissipate energy,
prolonged sinusoidal excitation generates rises in
temperature. In view of the sensitivity of these materials to temperature changes as discussed in Sects. 3.2.7
and 3.2.8, care is in order not to allow such thermal
build-up to occur unintentionally or not to take such
changes into account at the time of test data evaluations.
Consider now only the steady-state portion of (3.40)
so that
3.2 Linear Viscoelasticity
62
Part A
Solid Mechanics Topics
which, upon using the transformation t − ξ = u, yields
Log of functions
3
τ(t)
= iω
2ε(t)
2
∞
μ(u) e−iωu du = μ∗ (ω) .
−∞
If one recalls that the integral represents the Fourier
transform F {μ(t), t → ω} of the modulus in the integrand one may write
1
0
μ∗ (ω) = iωF {μ(t), t → ω}
–1
Part A 3.2
–2
–1.5
(3.59)
(3.60)
along with the inverse,
–1
–0.5
0
0.5
1
1.5
2
2.5
Log frequency
Fig. 3.10 Steady-state response of a standard linear solid to
sinusoidal excitation, (μ0 = 1, μ = 100, μ/η = ς0 = 0.1).
Symbols: μ (ω); short dash: μ (ω); long dash: tan Δ(ω)
While this material model is usually not suitable for representing real solids (its time frame is far too short),
this simple analog model represents all the proper limit
responses possessed by a real material, in that it has
short-term (μ0 + μs , glassy), long-term (μ∞ , rubbery)
as well as transient response behavior as illustrated
in Fig. 3.10. Note that, with only one relaxation time
present, the transition time scale is on the order of at
most two decades. The more general representation of
the viscoelastic functions under sinusoidal excitation
can also be interpreted as a Fourier transform of the
relaxation or creep response.
Complex Properties as Fourier Transforms. It is often
desirable to derive the harmonic properties from monotonic response behaviors (relaxation or creep). To effect
this consider the strain excitation of (3.38),
ε(t) = ε0 exp(iωt)h(t) ,
(3.56)
and substitute this into the convolution relation for the
stress (3.11),
t
μ(t − ξ)
τ(t) = 2ε(0)μ(t) + 2
0−
dε(ξ)
dξ ,
dξ
(3.57)
and restrict consideration to the steady-state response.
In this case, the lower limit is at t → −∞ so that the
integral may be written as
t
μ(t − ξ) eiωξ dξ ,
τ(t) = lim 2ε0 iω
t→∞
−t
(3.58)
1
μ(t) =
2π
∞
−∞
μ∗ (ω) −iωt
dω .
e
iω
(3.61)
Thus the relaxation modulus can be computed from
the complex modulus by the last integral. Note also that
because of (3.60) μ and μ are derivable from a single
function, μ(t), so that they are not independent. Conversely, if one measures μ and μ in a laboratory they
should obey a certain interrelation; a deviation in that
respect may be construed either as unsatisfactory experimental work or as evidence of nonlinearly viscoelastic
behavior.
Relationships Among Properties
In Sect. 3.2.2 exemplary functional representation of
some properties has been described that are generic
for the description of any viscoelastic property. On the
other hand, the situation often arises that a particular
function is determined experimentally relatively readily, but really its complementary function is needed. The
particularly simple situation most often encountered is
that the modulus is known, but the compliance is needed
(or vice versa). This case will be dealt with first.
Consider the case when the relaxation modulus
(in shear), μ(t) is known, and the (shear) creep compliance J(t) is desired. Clearly, the modulus and the
compliance cannot be independent material functions.
In the linearly elastic case these relations lead to reciprocal relations between modulus and compliance.
One refers to such relationships as inverse relations or
functions. Analogous treatments hold for all other viscoelastic functions. Recall (3.10) or (3.11), which give
the shear stress in terms of an arbitrary strain history.
In the linearly elastic case these inverse relations lead
to reciprocal relations between modulus and compliance. Recall also that the creep compliance is the strain
history resulting from a step stress being imposed in
a shear test. As a corollary, if the prescribed strain
Mechanics of Polymers: Viscoelasticity
history is the creep compliance, then a constant (step)
stress history must evolve. Accordingly, substitution of
the compliance J(t) into (3.10) must render the step
stress of unit amplitude so that
t
h(t) = J(0)μ(t) +
μ(t − ξ)
dJ(ξ)
dξ .
dξ
(3.62)
0+
+
→ 0 , J(0+ )/μ(0+ ) = 1
t
μ(t − ξ)J(ξ) dξ = t .
(3.63)
0
Note that this relation is completely symmetric in the
sense that, also,
t
J(t − ξ)μ(ξ) dξ = t .
(3.64)
0
Similar relations hold for the uniaxial modulus E(t)
and its creep compliance D(t), and for the bulk modulus
K (t) and bulk compliance M(t).
Interrelation for Complex Representation. Because
the so-called harmonic or complex material characterization is the result of prescribing a specific time history
with the frequency as a single time-like (but constant)
parameter, the interrelation between the complex modulus and the corresponding compliance is simple. It
follows from equations (3.45) and (3.46) that
1
2ε0 eiωt
2ε(t)
= ∗
=
= J ∗ (ω) ,
τ(t)
μ (ω)
τ0 ei(ωt+Δ(ω))
(3.65)
where the function J ∗ (ω) is the complex shear compliance, with the component J (ω) and imaginary
component −J (ω) related to the complex modulus by
J ∗ (ω) = J (ω) − iJ (ω) = J(ω)eiγ (ω)
=
1
μ∗ (ω)
=
e−iΔ(ω)
μ(ω)
(3.66)
so that, clearly,
1
and γ (ω) = −Δ(ω) ,
μ(ω)
with J(ω) = [J (ω)]2 + [J (ω)]2 .
J(ω) =
(3.67)
63
Thus in the frequency domain of the harmonic material description the interconnection between properties
is purely algebraic. Corresponding relations for the bulk
behavior follow readily from here.
3.2.7 Dissipation
Under Cyclical Deformation
In view of the immediately following discussion of the
influence of temperature on the time dependence of viscoelastic materials we point out that general experience
tells us that cyclical deformations engender heat dissipation with an attendant rise in temperature [3.34,
35]. How the heat generated in a viscoelastic solid as
a function of the stress or strain amplitude is described
in [3.13]. Here it suffices to point out that the heat
generation is proportional to the magnitude of the imaginary part of the harmonic modulus or compliance. For
this reason these (magnitudes of imaginary parts of the)
properties are often referred to as the loss modulus or
the loss compliance. We simply quote here a typical
result for the energy w dissipated per cycle and unit volume, and refer the reader to [3.13] for a quick, but more
detailed exposition:
∞
2 2mπ
m εm μ
(3.68)
.
w/cycle = π
T
m=1
3.2.8 Temperature Effects
Temperature is one of the most important environmental
variables to affect polymers in engineering use, primarily because normal use conditions are relatively
close to the material characteristic called the glasstransition temperature – or glass temperature for short.
In parochial terms the glass temperature signifies the
temperature at which the material changes from a stiff
or hard material to a soft or compliant one. The major effect of the temperature, however perceived by the
user, is through its influence on the creep or relaxation
time scale of the material.
Solids other than polymers also possess characteristic temperatures, such as the melting temperature in
metals, while the melting temperature in the polymer
context signifies specifically the melting of crystallites
in (semi-)crystalline variants. Also, typical amorphous
solids such as silicate glasses and amorphous metals
exhibit distinct glass-transition temperatures; indeed,
much of our understanding of glass-transition phenomena in polymers originated in understanding related
phenomena in the context of silicate glasses.
Part A 3.2
Note that, as t
so that at time
0+ an elastic result prevails. Upon integrating both sides
of (3.62) with respect to time – or alternatively, using the Laplace transform – one readily arrives at the
equivalent result; the uniaxial counterpart has already
been cited effectively in (3.37).
3.2 Linear Viscoelasticity
64
Part A
Solid Mechanics Topics
Part A 3.2
The Entropic Contribution
Among the long-chain polymers, elastomers possess
a molecular structure that comes closest to our idealized understanding of molecular interaction. Elastomer
is an alternative name for rubber, a cross-linked polymer that possesses a glass transition temperature which
is distinctly below normal environmental conditions.
Molecule segments are freely mobile relative to each
other except for being pinned at the cross-link sites. The
classical constitutive behavior under moderate deformations (up to about 100% strain in uniaxial tension)
has been formulated by Treloar [3.36]. Because this
constitutive formulation involves the entropy of a deformed rubber network, this temperature effect of the
properties is usually called the entropic temperature effect. In the present context it suffices to quote his results
in the form of the constitutive law for an incompressible solid. Of common interest is the dependence of the
stress on the material property appropriate for uniaxial
tension (in the 1-direction)
1
1
subject to λ1 λ2 λ3 = 1 ,
σ = NkT λ21 −
3
λ1
(3.69)
where λ1 , λ2 , and λ3 denote the (principal) stretch ratios of the deformation illustrated in Fig. 3.11 (though
not shown for the condition λ1 λ2 λ3 = 1), the multiplicative factor consists of the number of chain segments
between cross-links N, k is Boltzmann’s constant, and
T is absolute temperature. Since for infinitesimal deformations λ1 = 1 + ε11 , one finds that NkT must equal the
elastic Young’s modulus E ∞ . Thus the (small-strain)
Young’s modulus is directly proportional to the absolute temperature, and this holds also for the shear
modulus because, under the restriction/assumption of
incompressibility the shear modulus μ∞ of the rubber
obeys μ∞ = 13 E ∞ . Thus μ∞ /T = Nk is a material constant, from which it follows that comparative moduli
obtained at temperatures T and T0 are related by
T
μ∞|T = μ∞|T0 or equivalently
T0
T
E ∞|T =
E ∞|T0 .
(3.70)
T0
If one takes into account that temperature changes affect also the dimensions of a test specimen by changing
both its cross-sectional area and length, this is taken into
account by modifying (3.71) to include the density ratio
according to
ρT
μ∞|T0 or equivalently
μ∞|T =
ρ0 T0
ρT
E ∞|T =
E ∞|T0 ,
(3.70a)
ρ0 T0
where ρ0 is the density at the reference temperature and
ρ is that for the test conditions.
To generate a master curve as discussed below it is
therefore necessary to first multiply modulus data by the
ratio of the absolute temperature T (or ρT , if the densities at the two temperatures are sufficiently different) at
which the data was acquired, and the reference temperature T0 (or ρ0 T0 ). For compliance data one multiplies by
the inverse density/temperature ratio.
Time–Temperature Trade-Off Phenomenon
A generally much more significant influence of
temperature on the viscoelastic behavior is experienced
in connection with the time scales under relaxation or
creep. To set the proper stage we define first the notion
of the glass-transition temperature Tg . To this end consider a measurement of the specific volume as a function
Volume
λ1
λ3
λ2
B
A
Equilibrium line
Fig. 3.11 Deformation of a cube into a parallelepiped. The
unit cube sides have been stretched (contracted) orthogonally in length to the stretch ratios λ1 , λ2 , and λ3
Tg
Temperature
Fig. 3.12 Volume–temperature relation for amorphous
solids (polymers)
Mechanics of Polymers: Viscoelasticity
log G (t)
Experimental
window
sensitive properties, at least for polymers. For ease
of presentation we ignore first the entropic temperature effect discussed. The technological evolution of
metallic glasses is relatively recent, so that a limited
amount of data exist in this regard. However, new data
on the applicability of the time–temperature trade-off
in these materials have been supplied in [3.12]. Moreover, we limit ourselves to considerations above the
glass-transition temperature, with discussion of behavior around or below that temperature range reserved for
later amplification.
Experimental constraints usually do not allow the
full time range of relaxation to be measured at any
one temperature. Instead, measurements can typically
be made only within the time frame of a certain experimental window, as indicated in Fig. 3.13.
This figure shows several (idealized) segments as
resulting from different temperature environments at
a fixed (usually atmospheric) pressure. A single curve
may be constructed from these segments by shifting the
temperature segments along the log-time axis (indicated
by arrows) with respect to one obtained at a (reference)
temperature chosen arbitrarily, to construct the master
curve. This master curve is then accepted as the response of the material over the extended time range at
the chosen reference temperature. Because this time–
temperature trade-off has been deduced from physical
measurements without the benefit of a time scale of
unlimited extent, the assurance that this shift process
is a physically acceptable or valid scheme can be derived only from the quality with which the shifting or
P = P0
T1
T0 = T3
⎛ σ 273 ⎛
⎜ (psi)
⎝ ε0 T ⎝
log0 ⎜
5
T3
Temperature (°C)
–30.0
–25.0
–22.5
–22.0
–17.5
–15.0
–12.5
–7.5
–5.0
–2.5
5.0
T2
T4
T5
log aT4
4
Master curve
at T3
3
ε0 = 0.05
T1 < T2 < ··· <T5
log t
Fig. 3.13 Illustration of the temperature shift phenomenon.
Segments of G(t) measured at different temperatures, and
corresponding master curves
2
–2
–1
0
1
2
3
log10 t (min)
Fig. 3.14 Relaxation modulus for a polyurethane formula-
tion measured at various temperatures in uniaxial tension
65
Part A 3.2
of temperature. Typically, such measurements are made
with a slowly decreasing temperature, curve A in
Fig. 3.12, because the rate of cooling has an influence on
the outcome. Figure 3.12 shows a typical result, which
illustrates that at sufficiently low and high temperatures
the volume dependence is linear, with a transition connecting the two segments.
The glass-transition temperature is defined as the
intersection of two linear extensions of the two segments roughly in the center of the transition range. As
also indicated in Fig. 3.12, an increase in the rate of
cooling causes reduced volume shrinkage as a result
of the unstable evolution of a molecular microstructure
that consolidates with time, curve B in Fig. 3.12. This
phenomenon is associated with physical aging [3.37–
44]. In practical terms the lowest – most stable – response curve is determined basically by the patience of
the investigator, though substantial deviations must be
measured in terms of logarithmic time units: Relatively
little may be gained by reducing the cooling rate from 1
to 0.1 ◦ C/h.
We turn next to the effect of temperature on the
time scale and present this phenomenon in terms of
a relaxation response, say, in shear. The discussion is
generic in the sense that it applies, to the best of the
collective scientific knowledge, to all time- and rate-
3.2 Linear Viscoelasticity
66
Part A
Solid Mechanics Topics
superposition can be accomplished. To examine this
quality issue requires that test temperatures are chosen sufficiently closely, and that the measurements vary
as widely as feasible over the log-time range to afford
maximum overlap of the shifted curve segments.
The amount of shifting along the log-time axis is
recorded as a function of the temperature. This function
is usually called the temperature-dependent shift factor,
or simply the shift factor for short; it is a material characteristic, and is often designated by φT . Figures 3.14
and 3.15 illustrate the application of the shift principle
for a polyurethane elastomer, together with the associated shift factor φT in Fig. 3.16.
Part A 3.2
The Role of the Entropic Contribution
Having demonstrated the shift phenomenon in principle,
it remains to address the effect of the entropic contribution to the time-dependent master response. Recall that
the entropic considerations were derived in the context
of purely rubbery material behavior, and specifically in
the absence of viscoelastic effects. Thus any modulus
variation with temperature is established, strictly speaking, only in the long-term time domain when rubbery
behavior dominates, so that (3.70) applies. Various arguments have been put forward [3.45] to apply a similar
reduction scheme to data in the viscoelastic transition
log (shift factor)
8
region. Two arguments dominate, but they are based
on pragmatic rather than rigorously scientific principles. The first argument states that, even in the transition
region, the polymer chain segments experience locally
elastic behavior in accordance with the theory of rubber
elasticity. Accordingly, all curve segments obtained at
the various temperatures should be multiplied by their
respective ratios of the reference temperature and the
test temperature, i. e., T0 /T , in the case of modulus
measurements, and with the inverse ratio in the case of
compliance measurements, regardless of by how many
log-time units the material behavior is removed from
the rubbery (long-term) domain. The alternative view
asserts that the entropic correction does not apply in
the glassy state and, accordingly should decrease continuously from the long-term, rubbery domain as the
glassy or short-term behavior is approached. The rule
by which this change occurs is not established scientifically either, but is typically taken to be linear with the
logarithmic time scale throughout the transition. Ultimately one needs to decide on the basis of the precision
in the data whether one or the other scheme produces
the better master curve. The crucial argument in that decision is whether the mutual overlap of the segments
derived from measurements at different temperatures
provides for the most continuous and smoothest master
curve.
The Shift Factor
While several researchers have contributed significantly
to clarifying the concept and the importance of the
6
4
log10 (273/T ) E (t) (psi)
5
2
4.5
Reference temperature
T0 = 0 °C
5% strain
4
0
3.5
–2
3
–4
– 40
–30
–20
–10
0
10
20
Temperature
Fig. 3.15 Time–temperature shift factor for reducing the
polyurethane data in Fig. 3.14 to that in Fig. 3.16.
Tg = −18 ◦ C The solid line represents the WLF-equation
log10 φT =
−8.86(T − 32 ◦ C)
− 4.06
101.6 + (T − 32 ◦ C)
2.5
2
–9 –8 –7 –6 –5 –4 –3 –2 –1 0
1
2
log10 t/φT (min)
Fig. 3.16 Temperature-reduced uniaxial relaxation modulus for a polyurethane formulation derived from data in
Fig. 3.14 and with the shift factors in Fig. 3.15
Mechanics of Polymers: Viscoelasticity
log(aT ) =
c1 (T − Tref )
,
c2 − (T − Tref )
(3.71)
where Tref denotes an arbitrarily chosen reference
temperature typically about 50 ◦ C above the glasstransition temperature of the polymer under consideration. The constants c1 and c2 vary from polymer
to polymer, but for many take on values around
c1 ∼
= 8.86 and c2 ∼
= 101.6. In terms of the relaxation data
in Fig. 3.14, the shift procedure renders the composite
or master curve as shown in Fig. 3.16.
Time–Temperature Trade-Off
under Transient Temperature Conditions
While the time–temperature shift principle is observed
in the laboratory under different temperatures, which
are however constant during the measurements, there
are many situations in the engineering environment
in which temperatures vary more or less continuously
while creep or relaxation processes occur. To assess how
such thermal changes affect the viscoelastic response,
Morland and Lee proposed [3.54], following the ideas
promulgated in the practice developed for the silicate
glasses, that the time–temperature shift relation applies
instantaneously. Let T0 denote the reference temperature at which the master curve has been established and
let T be the temperature at which the material behavior
is desired. Then the developments in Sect. 3.2.8 above
state that the time (scale) at a temperature T , and designated by t , is related to the time (scale) t at the reference
temperature by
t =
t
.
φT (T )
(3.72)
Instantaneous obeyance to this rule requires then
that (3.72) apply differentially as the temperature
changes with time, namely
dt
or alternatively that
dt =
φt (T (t))
t
dt
t =
.
φT (T (t))
67
(3.73)
0
While such an integration can always be effected
numerically, in principle, it is important to note that
the logarithmic time scale calls for careful evaluations
of the integrals with variable time steps, yet without incurring excessive computation time or inaccurate
evaluations resulting from too crude an incrementation
of time [3.55].
Time–Temperature Shifting Near and Below the Glass
Transition. The time–temperature shifting above the
glass-transition temperature has been presented as basically an empirical rather than a uniquely explained
process, though many researchers firmly trust its validity because of extensively consistent demonstration
(see, e.g., [3.45, 50]). The applicability of the shift principle to temperatures near and below the glass transition
has been questioned for many years, but is gradually gaining acceptance with certain provisos. First, no
functional analytic form has been proposed – uniquely
supportive or conflicting – that yields credence to the
effect in terms of some molecular model. Moreover,
because phenomena at and below the glass transition
do not occur with molecular conformations in equilog [E (t)] (Pa)
9.6
22 °C
9.4
35°C
50°C
65°C
9.2
80°C
90°C
9
100°C
105°C
8.8
0
1
2
3
4
5
log (t) (s)
Fig. 3.17 Relaxation behavior in shear for PMMA at various temperatures in the transition range and below the
glass transition; the glass-transition temperature is 105 ◦ C.
(Material supplier: ACE. After [3.15])
Part A 3.2
time–temperature superposition principle [3.46–49], it
was the group of Williams, Landel, and Ferry [3.50]
that has been credited with formulating the time–
temperature relationship through the now ubiquitously
quoted WLF equation. They demonstrated the near
universality of this connection for many diverse polymers, and provided a physical model for the process
in terms of a free-volume interpretation. Plazek [3.51–
53] has supplied an exemplary demonstration of the
nearly perfect obeyance of the shift phenomenon
for polystyrene and poly(vinyl acetate). Ignoring, for
brevity of presentation, the details of the polymer mechanical argumentation, WLF derived on the basis of
free-volume concepts that above the glass-transition
temperature the shift factor is given by the relation
3.2 Linear Viscoelasticity
68
Part A
Solid Mechanics Topics
rates leading to a more unique adherence to a shift
concept. Figure 3.17 shows relaxation data of polymethyl methacrylate (PMMA) at various (constant)
temperatures below the glass transition (Tg =105 ◦ C
for PMMA). This data, shifted to produce the master
curve in Fig. 3.18, generates a shift factor, that while
not fitting the WLF equation (3.71), represents nevertheless a reasonably coherent relation [3.15], as shown
in Fig. 3.19. Many independent, but not thoroughly documented, counterparts have been produced over the last
decade, which present equally supportive information
of a consistent time–temperature superposition application through and below the glass transition.
log [ µ(t)] (Pa)
9.2
8.8
8.4
8
7.6
7.2
Part A 3.2
6.8
–10
–5
0
5
10
log (t) (s)
Fig. 3.18 Relaxation in PMMA, reduced (shifted) commensurate with the shift function in Fig. 3.19. The entropic
correction has not been applied to the vertical axis (Material supplier: ACE. After [3.15])
librium, the ideas underlying the shift phenomenon
above the glass transition are questioned more readily in the context of these lower temperatures. For
example, the role of nonequilibrium changes in freevolume interferes with simple concepts and complicates
the rules by which such examinations and data interpretations are carried out. For example, Losi and
Knauss [3.56] have argued on the basis of free-volume
considerations that any shift operation below the glass
transition should depend on the temperature rate with
which the state of the polymer is approached, slower
3.2.9 The Effect of Pressure on Viscoelastic
Behavior of Rubbery Solids
It is important to recognize that pressure can have
a large effect on the viscoelastic response through
its influence on the free volume. This fact is important when high speed impact is involved, such
as when measurements are made with split Hopkinson bars, or when materials are otherwise subjected
to high pressures (civil engineering: building support pads for protection against earthquake damage).
Similar to the time–temperature trade-off, pressure
produces a pressure-sensitive shift phenomenon. Figlog G (t)
Experimental
window
T = T0
P5
log [φT (t)] (s)
12
Shift factor for E (t)
10
P0 = P3
P3
P4
8
6
P2
log aP2
4
2
P1
Master curve
at P3
0
–2
0
25
50
75
100
125
Temperature (°C)
Fig. 3.19 Shift factor derived from Fig. 3.17 to generate the
master curve in Fig. 3.18 (after [3.15])
P1 < P2 < ··· <P5
log t
Fig. 3.20 Effect of pressure on the viscoelastic response of
a polymer (after [3.57])
Mechanics of Polymers: Viscoelasticity
θ(P) = f T0 (P)/βf (P) and
P
P
f T0 (P) = κe T0 dP − κφ T0 dP
P0
(3.75)
P0
with κe denoting the compressibility of the entire volume, and κφ is the compressibility of the occupied
volume.
If we let K e∗ (T ) be the bulk modulus at zero pressure
and κe a proportionality constant, one arrives at
c00
1 [T − T0 − θ(P)]
with
00
c2 (P) + T − T0 − θ(P)
1 + c06 P
1 + c04 P
0
−
c
θ(P) = c03 (P) ln
(P)
ln
5
1 + c04 P
1 + c06 P
log αT,P = −
(3.76)
and the notation
c00
1 = B/2.303 f 0 ;
c00
2 = f 0 /βf (P) ;
c00
3 = 1/kr βf (P) ;
∗
c00
4 = ke /K e ;
c00
5 = 1/kφ βf (P) ;
∗
c00
6 = kφ /K φ .
(3.77)
The 00 superscript indicates that the parameter is referred to the reference temperature T0 (first place) and
to the reference pressure P0 (second place). A single 0 superscript refers to the reference temperature
only. The asterisk superscript refers to zero pressure.
Equation (3.76) is the Fillers–Moonan–Tschoegl (FMT)
equation. Setting θ(P) = 0 (i. e., performing the experiments at the reference pressure), the FMT equation
reduces to the WLF equation (3.71).
3.2.10 The Effect of Moisture and Solvents
on Viscoelastic Behavior
It has been observed that the presence of moisture in some polymers has an effect similar to that
of an elevated temperature in that increased moisture content shortens the relaxation or retardation
times [3.63, 64]. This process may or may not be reversible. Plazek [3.52] has pointed out, for example,
that in polyvinyl acetate moisture must be removed
carefully prior to forming centimeter-sized test samples. Once such larger test samples have absorbed
(some) moisture, it may be impossible to totally remove the same. In determining viscoelastic properties
it is thus important that one assess the tendency of
the material to absorb moisture or other solvents.
This property can be disturbing during the acquisition of mechanical properties if no specific precautions
are taken: For example, measurements performed on
days during changing humidity may render data that
violates the concept of time–temperature trade-off.
A technologically important material with a considerable tendency to absorb moisture is nylon (6
and 66), with corresponding implications for the deformability and/or structural load-carrying ability over
time.
3.3 Measurements and Methods
A considerable range of commercial equipment has
been developed over the years to characterize viscoelastic material behavior. Such instrumentation for
tensile and compression tests are standard screw-type
test frames (Instron, Zwick) or servohydraulic machines
(MTS, Instron); the latter type are available for torsional
(shear) and combined tensile/torsional characterization, also. Because of the sensitivity to environmental
temperatures, these machines are usually equipped –
or should be – with environmental control chambers
69
(temperature and moisture control). Differential thermal
analyzers (DTAs) are available commercially to measure glass transition and melt temperatures, though they
are sometimes combined with force measurement capability, and these devices often function with short,
stubby bend specimens and, as typically used, provide
more qualitative rather than precise property measurements. Similarly, dynamical mechanical analyzers
(DMAs) are more geared to making mechanical properties measurements and can employ either steady-state
Part A 3.3
ure 3.20 illustrates this material behavior parallel to
the time–temperature shift phenomenon. Without delving into the molecular reasoning for modeling this
phenomenon [3.58] we quote here the results by
Fillers, Moonan, and Tschoegl [3.59–62], which extend the temperature shift factor into a consolidated
temperature-and-pressure shift factor of the form (note
the similarity to the WLF equation (3.71))
B
log αT,P = −
2.303 f 0
T − T0 − θ(P)
×
, (3.74)
f 0 /αf (P) + T − T0 − θ(P)
where
3.3 Measurements and Methods
70
Part A
Solid Mechanics Topics
Part A 3.3
loading or oscillatory excitation for frequency sensitive
properties, though here the same caveat is in order as for
work with DTAs.
For frequency imposed shear deformations (rotation) commercial test equipment is available and accessible over the web (e.g., Google→Rheometrics). Except
for nanoindentation equipment, to be discussed later,
other instrumentation is constructed for specific tasks.
For example, Plazek has provided an exemplary construction of long-term measurement equipment [3.65]
that provides precise force/moment definition and
recording equipment that is unusually stable over long
periods approaching six decades of time. A thoughtful design of a torsion pendulum for shorter time
frames has been supplied by the same researcher [3.66].
A rheometer utilizing an eddy-current torque transducer
and an air-bearing suspension has been developed by
Berry et al. [3.67] for measurements of creep functions in shear in both the time and frequency domains.
For investigating the interaction of shear and volume
response, Duran and McKenna [3.68] developed a torsiometer with ultrafine temperature control to access
time-dependent changes in volume resulting from the
torsion of a cylinder, with the volume change being
monitored via a mercury column.
3.3.1 Laboratory Concerns
While test procedures for typical material characterization have been in place in the laboratory for many years,
there are special considerations that apply to the determination of viscoelastic properties. Because usually
long-term measurements are in order, careful attention
needs to be paid to temporal consistency of the equipment. The most important and often recurring issues are
discussed here briefly.
Equipment Stability
Because often extensive time intervals are needed to
record data, the associated electrical equipment needs to
be commensurately stable for long periods of time. Often electronic equipment will record data without drift
for periods of an hour or two. However, with the desire
to record data for as long as days, one needs to be assured that during that time interval the equipment does
not drift or does not do so to a significant extent. The
easiest way of checking stability is by trial.
Environmental Control
All polymers are sensitive to thermal variations and
many also to moisture changes. While sometimes only
quick and rough estimation of physical properties are
desired, careful measurements demand absolute environmental control that can be afforded only through
suitable environmental chambers, most often matched
to existing or purchased test frame systems. How
closely environmental control must be exercised depends on the study at hand: Thermal control ranges
that may be necessary can be estimated with the aid of
the shift factor delineated in Sect. 3.2.8. Moisture control may be exercised by way of saline solutions if the
test chamber is relatively small, or by injecting suitably proportioned streams of dry and water saturated
air into the (larger) test chamber [3.63]. The degree to
which moisture influences the time-dependent behavior may be estimated from volume considerations if
the swelling from moisture of the material is known
(it may have to be measured separately). One estimates that the moisture-induced volume change equals
a thermally induced volume change, from which consideration one deduces the influence of moisture via
Sect. 3.2.8 in the form of an equivalent temperature
sensitivity. From this information one may estimate
whether the potential moisture influence is disturbingly
large.
The Use of Wire and Foil Strain Gages
on Polymers
It is clear on general principles that the use of wire/foil
gages is ill advised for soft materials because one typically needs to ignore the effect of reinforcing the test
material by the stiff, if thin, gage(s). While it has been
extensively attempted to develop strain-measuring devices with foil gages for application to relatively soft
solids (solid propellant rocket fuels) with the aid of
computational and experimental analysis tools, these
costly programs have not yielded useful results. In
contrast, wire/foil gages are, however, used on rigid
polymers.
As has been demonstrated amply in the above developments, polymer mechanical responses can be very
sensitive to temperatures. This fact is important to
remember in connection with the use of electric-currentdriven strain gages bonded to polymers. Because these
devices dissipate heat in immediate proximity to the
polymer, this phenomenon needs to be controlled.
While it is true that in the past strain gages have been
bonded to metallic structures without much concern
for the thermal effects on the bonding agent, it must
be remembered that these bonding agents had been
developed with this special concern in mind, being
also well aware that the metallic component usually
Mechanics of Polymers: Viscoelasticity
Soft Materials
Most of the more standard engineering materials are relatively solid or stiff, so that clamping a specimen in the
jaws of a typical test machine poses no particular problem. However, many polymers are either relatively soft
(to the touch) or when stiff nevertheless will creep out
of the machine gripping device(s) over time. Because
the expected response may be a decrease over time (as
in a relaxation test), a slow flow of material out of the
gripping jaws may not become apparent unless careful
tracking of that potential process is achieved. This problem is most prevalent, for example, when dealing with
near-rubbery behavior under tension, because tension
invokes Poisson contraction, which is maximal under
these conditions (ν = 1/2) and thus most prone to give
71
rise to jaw flow. The traditional way to cope with this
type of occurrence is to bond metal (aluminum) tabs to
the ends of a specimen so as to redistribute the clamping
forces.
Mechanical Overshoot Phenomenon
When relaxation tests are of interest the usual
test machines provide a ramp history, as discussed
in Sect. 3.2.6. If examined in detail these ramp histories
typically exhibit an overshoot phenomenon that derives
from the dynamics (inertia) of the test machine. Recall that it is usually of interest to gain access to as
large a test duration as possible. Basically three avenues
are open to the investigator, depending on the need for
precision and necessary time range:
1. The time history involving the loading transients are
ignored by disregarding the initial time history extending over ten times the ramp rise time. This is
a serious experimental restriction, but represents the
method most consistently practised in the past.
2. Expand the initial time scale by resorting to the
method described in [3.32] or [3.33], remaining
conscious, however, that the overshoot between the
linear rise and constant deformation history should
not interfere with the assumptions underlying these
approximations. This means that the deformation
history has to be carefully recorded.
3. Write out in closed form the response to the full
ramp history and fit this analytical expression to the
measurement data. With a Prony series representation it is advisable to choose a series representation
that contains at least as many terms as are desired
for the test duration. While this may be a tedious
algebraic process, it may not be easily possible to
achieve the same goal without a Prony-series representation. The overshoot phenomenon would then
require a judicious redacting of the data so as to
eliminate the inaccuracies derived from it.
4. The final, most precise method to date would entail
a careful measurement of the deformation history,
including the overshoot modeled by an integrable
function, and apply the same representation method
indicated under (3) above.
3.3.2 Volumetric (Bulk) Response
In this section we distinguish between methods
geared to determining small-strain volumetric properties and those derived from non-infinitesimal volumetric
deformations.
Part A 3.3
provided excellent heat conductivity. Even so, it is
a common, if not universal, practice to activate the electric current in the strain gage(s) only intermittently so
as to reduce the heat generation. If foil gages are desired, the sufficiency of this option must certainly be
considered.
The overriding consideration in this connection is
the temperature achieved at the strain gage site relative to the glass-transition temperature of the polymer,
on the one hand, and the duration of the measurements
on the other. Thus, a strain gage may well serve on
a polymer in a wave propagation experiment, but may
fail miserably in similar circumstances if the test time
is measured in weeks. As a quick rule of thumb it is
our recommendation that temperatures under a gage remain 50 ◦ C below the glass-transition temperature for
applications of short duration. Ultimately, one must
consider the relaxation or creep behavior of the polymer
for the range of temperatures anticipated in the experiment, whereby a fractional change in stiffness must
be estimated for the expected duration of the measurements. Clearly, one needs to be concerned with both
the temperature and the test duration. This estimation
may actually require that the temperature in the gage
vicinity be determined experimentally (infrared tooling)
and the results coupled with a numerical stress analysis
assessment of the effect on the gage readout(s). Here
it should also be remembered that modulus and compliance data are typically presented on a logarithmic
scale, making changes due to temperature appear small,
when in fact the true change is considerably larger.
An error on the order of 10–15% in misinterpreted
modulus data could translate into a commensurately
large and systematic error in the ultimate, experimental
results.
3.3 Measurements and Methods
72
Part A
Solid Mechanics Topics
Part A 3.3
Very Small Volumetric Strains
In linearly elastic materials bulk behavior is most typically determined (a) directly from wave propagation
measurements or (b) indirectly from shear or Young’s
modulus data together with Poisson’s ratio as measured, e.g., from the antielastic curvature of beams. For
viscoelastic solids other methods need to be employed
with nontrivial equipment requirements. In our experience, this method has not been applied to viscoelastic
materials. The dominant reason is, most likely, that the
formation of an optical gap between the specimen and
the reference mirrors, which would rest on the specimen edges, must cope with the deformations generated
by the weight of the reference mirror. Absent a local reference mirror an interferometric assessment of
the deformation field would require the subtraction of
the overall specimen deformation from the curvatureinclusive deformation pattern, a process that is prone
to lead to relatively large errors. For viscoelastic solids
other methods need to be employed with non-trivial
equipment requirements. Because the effort is considerable (see the historical development starting with [3.69,
70]) the details of this measurement method are not presented here, other than to point out via Fig. 3.21 what is
involved in principle.
As illustrated in Fig. 3.21, one process revolves
around a stiff cavity to receive a specimen, after which
the cavity is filled with an appropriate liquid with which
the specimen does not interact (by swelling or otherwise). A piezoelectric driver generates (relatively)
small sinusoidal pressure variations, which compress
the specimen in a quasistatic manner as long as the cavity size is chosen appropriately. A separate piezoelectric
a)
pick-up measures the pressure response with respect
to both amplitude and phase shift relative to the input
pressure. The compressibility of the liquid having been
determined by calibration, the specimen compressibility modifies the cavity signal (by a small amount). From
the (complex) difference one derives the harmonic bulk
modulus or compliance. Because these are difference
measurements, the precision for the bulk behavior requires the ultimate in precision in instrumentation and
calibration. A major limitation of this approach is that
because of potential resonances the range of frequencies
is also limited to less than four decades of frequency
(time). For further detail the reader may wish to consult
the references [3.71, 72].
Bulk Measurements Allowing
also for Non-infinitesimal Volume Strains
An alternative method, though associated typically with
larger volume strains, has been offered successfully
by Ma and Ravi–Chandar [3.73, 74], Qvale and RaviChandar [3.75], and Park et al. [3.76], who followed the
same method. This method involves a hollow cylinder
instrumented with strain gages on its exterior surface.
A physically closely fitting solid specimen is formed in,
or introduced into, its interior and pressure is applied
through an axially closely fitting compression piston,
as illustrated in Fig. 3.22. Proper choice of the cylinder material and its wall thickness allows optimization
of the response measurements to, say, a constant piston displacement (bulk relaxation) from which the bulk
relaxation modulus can then be determined. If the cylinder is manufactured from a material that remains elastic
during a test (say steel), with a and b denoting its interb)
Electrode
Oil outlet
Electrical
feed-through
Teflon washer
Outlet needle
valve
Cavity
Oil outlet
Piezoelectric
disk
Specimen
Grid for specimen
support
Inlet needle
valve
Electrode
K-Seal
Oil inlet
Oil inlet
Fig. 3.21 (a) Global and (b) local cavity arrangement for measuring the bulk modulus with harmonic excitation
Mechanics of Polymers: Viscoelasticity
Confining
cylinder
3.3 Measurements and Methods
2
ezz (t) = [ezz (t) − err (t)] ,
3
1
err (t) = eθθ (t) = − [ezz (t) − err (t)] ,
(3.81)
3
which are connected by the constitutive relations
(Steel)
loading pins
t
σkk (t) = 3σm (t) = 3
Strain gage(s)
t
sij (t) = 2
μ(t − ξ)
−∞
bulk response
nal and external radius, respectively, the circumferential
strain εθ on the exterior surface is related to the internal
pressure σrr and the strains on the cylindrical specimen
surface εrr = εθθ by
(b/a)2 − 1 c
σrr (t) = σθθ (t) = −
E εh ,
2
1
b2
εrr (t) = εθθ (t) = εh (t) (1 − vc ) + (1 + vc ) 2 ,
2
a
σzz (t) = σa (t) ,
(3.78)
εzz (t) = εa (t) ,
where the usual nomenclature of radial coordinates applies, E c and vc are the elastic properties of the (steel)
cylinder, and the subscript ‘a’ refers to the axially oriented stress and strain as determined, respectively, from
the load cell of the test frame or measured by the relative
motion of the pressure pistons.
Upon expressing the stress and strain fields in the
specimen into dilatational and deviatoric (shear) components by using the mean stress
1
(3.79)
σm (t) = [σzz (t) + 2σrr (t)]
3
and the dilatation
(3.80)
Along with the usual definition of deviatoric components of stress sij (t) and strain eij (t),
∂δ(ξ)
dξ ,
∂ξ
∂δ(ξ)
dξ ,
∂ξ
(3.82)
(3.83)
from which the bulk modulus K (t) and the shear modulus μ(t) can be determined.
Typically, a constant piston displacement can be
used to lead to relaxation behavior or alternatively,
a constant relative velocity of the pistons can be used
in the last set of equations. Ravi-Chandar and his coworkers demonstrated axial strains of as high as ≈ 20%,
though the deformation in the linearly viscoelastic domain required only strains on the order of 5% or less.
These latter values are still much larger than those encountered in the harmonic test method [3.71,72] though
the same results should prevail with this difference in
magnitudes, as long as one is convinced that the linear
properties extend over this larger strain range. Because
the specimen deformation depends on both the bulk and
on the shear characteristics of the material one can evaluate simultaneously the (relaxation) shear modulus as
well. A constant axial piston velocity may be used as an
alternative loading history.
log (modulus/GPa)
0.5
0
–0.5
–1
–1.5
Bulk modulus
Shear modulus
–2
–5 –4 –3 –2 –1
0
1
2
3
4
5 6
log t
Fig. 3.23 Bulk and shear modulus in relaxation both obtained in a single measurement series in the apparatus of
Fig. 3.22
Part A 3.3
Fig. 3.22 Cylinder/piston arrangement for determining
2
szz (t) = [σzz (t) − σrr (t)] ,
3
1
srr (t) = sθθ (t) = − [σzz (t) − σrr (t)] ,
3
K (t − ξ)
−∞
Specimen
δ(t) = εzz (t) + 2εrr (t) .
73
74
Part A
Solid Mechanics Topics
E(t) (GPa)
10
Highly
confined
1
Unconfined
Confined
0.1
Tref = 80°C
Part A 3.3
0.01 –4
10
10–2
100
102
104
106
t/a T
Fig. 3.24 Uniaxial relaxation modulus as determined in
the configuration of Fig. 3.22, the confinement being controlled by the stiffness of the exterior cylinder [3.75]
Special care is required in order to minimize or
eliminate the gap between the specimen and the interior
cylinder wall. Because of the typically relatively high
compressibility of polymers, the measurements are sensitive to small dimensional changes in the test geometry.
However, sufficient precision can be achieved with appropriate care, as demonstrated in references [3.73–75].
An example of measurement evaluations are shown
in Fig. 3.23 for PMMA in the form of both bulk and
shear behavior. If the shear and bulk modulus possessed
the same time dependence, Poisson’s ratio would be
a constant. From these figures it is immediately apparent over what range the bulk and shear moduli exhibit
closely the same time dependence and over what range
the approximation of a constant bulk modulus would
render acceptable or even good results in a viscoelastic
analysis.
Qvale and Ravi-Chandar [3.75] point out that the
polymer is well below the glass-transition temperature
and that the effect of moving to high pressures is to extend the relaxation or retardation times to longer values
as would be the result of cooling the material to lower
temperatures. An example of this effect is demonstrated
in Fig. 3.24 [3.75], which shows three data sets: one,
identified as unconfined is for zero superposed pressure;
the other two result from different degrees of pressure
as controlled by the choice of material for the confining
cylinder Fig. 3.22. This effect is thought to be linked to
the reduction in free volume of the polymer as a result
of the compression.
3.3.3 The CEM Measuring System
A relatively recent measurement system providing for
the determination of numerous (time-dependent) properties besides bulk response with a high degree of
(Plazek)-precision is the CEM measuring system (taken
from the initials of the Center for Experimental Mechanics, University of Ljubljana, Slovenia) [3.57, 77].
Table 3.2 Measuring capabilities of the CEM apparatus
Measured
Calculated from
definitions
Calculated from
models
Physical Properties
Symbols
Temperature
Pressure
Angular displacement
Specimen length
Torque
Shear relaxation modulus
Shear compliance
Specific volume
Linear thermal expansion coefficient
Volumetric thermal expansion coefficient
Bulk creep compliance
Bulk modulus
WLF constants
WLF material parameters
FMT constants
FMT material parameters
Shift factors
T (t)
P(t)
ϑ0 = ϑ(t = 0)
L(t), L(T ), L(P)
M(t), M(T ), M(P)
G(t), G(T ), G(P)
J(t), J(T ), J(P)
ν(t), ν(T ), ν(P)
α(T ), α(P)
β(T ), β(P), βg , βe , βf
B(t), B(T ), B(P)
K (T ), K (P)
c1 , c2
αf , f 0
c1 , c2 , c3 , c4 , c5 , c6
αf (P), α0 (P), B, K e∗ , ke , K φ , kφ
a(T ), a(P) and/or a(T, P)
or
or
or
or
or
or
or
or
or
L(t, T, P)
M(t, T, P)
G(t, T, P)
J(t, T, P)
ν(t, T, P)
α(T, P)
βgef (T, P)
B(t, T, P)
K (T, P)
Mechanics of Polymers: Viscoelasticity
3.3 Measurements and Methods
75
Thermal bath
Pressure vessel
Electromagnet
Measuring inserts
Silicone
oil
Carrier amplifier
Circulator
Data acquisition
Magnet and motor charger
Pressurizing system
Fig. 3.25 Schematic of the CEM measuring system
Although the apparatus is not yet available as a routine commercial product, we cite here its components
because of the larger-than-normal range of properties
that can be determined with it. This list is shown in Table 3.2. The system measures five physical quantities:
temperature, T (t); pressure, P(t); torsional deformation
(angular displacement) per unit length, ϑ0 , applied to
the specimen at t = 0; specimen length L(t, T, P); and
the decaying torque, M(t, T, P), resulting from the initial torsional deformation, ϑ0 .
The system assembly is shown schematically
in Fig. 3.25. The pressure is generated by the pressurizing system using silicone oil. The pressure vessel is
contained within a thermal bath, through which another
silicone oil circulates from the circulator, used for close
control of the temperature. The apparatus utilizes two
separate measuring inserts, which can be housed in the
pressure vessel: the relaxometer, shown in Fig. 3.26a,
and the dilatometer, shown in Fig. 3.26b. Signals from
these measuring inserts pass through the carrier amplifier prior to being collected in digital format by the data
acquisition system.
The magnet and motor charger supplies power to
the electromagnet, which initiates the measurement.
The same charger also supplies current to the electric motor of the relaxometer, shown in Fig. 3.26a,
which preloads the spring that then applies the desired torsional deformation (angular displacement) to
the specimen. Specimens can be simultaneously subjected to pressures of up to 600 MPa with a precision of
± 0.1 MPa, and to temperatures ranging from −50 ◦ C
to +120 ◦ C with a precision of ± 0.01 ◦ C.
The Relaxometer
The relaxometer insert, shown in Fig. 3.26a, measures
the shear relaxation modulus by applying a constant
torsional strain to a cylindrical specimen, and by monitoring the induced moment as a function of time. The
specimen diameter can range from 2 mm to 10 mm, and
its length from 52 mm to 58 mm. For details on specimen preparation the reader is referred to [3.77].
Two main parts of the insert are the loading device, and the load cell. The loading device applies
a torsional strain by twisting the specimen a few
degrees (typically around 2◦ in less than 0.01 s, depending on the initial stiffness of the specimen). To
effect this deformation, the electric motor first preloads
a torsion spring. Once twisted, the spring is kept in
its preloaded position by a rack-and-pawl mechanism.
The activation of the electromagnet, mounted outside
the pressure vessel (Fig. 3.25), releases the pawl so
that the spring deforms the specimen to a predetermined angle. The induced moment is then measured
by the load cell, which is attached to the slider mechanism to compensate for possible changes in the length
of the specimen resulting from changes in temperature, pressure, and the Poynting effect (shortening
of the specimen caused by a torsional deformation).
After the shear relaxation measurement is complete,
the electric motor brings the specimen to its origi-
Part A 3.3
Silicone fluid
76
Part A
Solid Mechanics Topics
a)
Fig. 3.26 The CEM relaxometer and dilatometer
inserts
b)
Loading
device
Triggering
mechanism
LVDT
Electric motor
280 mm
LVDT rod
260 mm
Specimen
Slider
mechanism
Specimen
Part A 3.3
Load cell
nal undeformed state, while maintaining the pressure
vessel fully pressurized. The relaxometer can measure
shear moduli in the range 1–4000 MPa, with a maximal relative error of 1% over the complete measuring
range.
The Dilatometer
The dilatometer insert, shown in Fig. 3.26b, is used
to measure bulk properties such as the: bulk creep
compliance, B(t, T, P); equilibrium bulk creep compliance, B(T, P) = B(t → ∞, T, P); specific volume
ν(T, P) = ν(t → ∞, T, P), and thermal (equilibrium)
expansion coefficient, β(T, P) = β(t → ∞, T, P). The
bulk compliance may be inverted to yield the bulk modulus. Measurements are performed by monitoring the
volume change of the specimen which results from the
imposed changes in pressure and/or temperature, by
measuring the change in specimen length, L(t, T, P),
with the aid of a built-in linearly variable differential
transformer (LVDT). The volume estimate can be considered accurate if the change in volume is small (up to
a few percent) and the material is isotropic. Dilatometer specimens may be up to 16 mm in diameter and
40–60 mm in length. The relative measurement error in
volume is 0.05%.
Displacement dilatometry has an accuracy advantage over mercury confinement dilatometry inasmuch
as it allows an easily automated measurement process
for tracking transient volume changes over extended
periods of time. However, for soft materials an important limitation arises (usually at temperatures above Tg ),
when the specimen’s creep under its own weight becomes significant. Given the arrangement of the LVDT
rod (Fig. 3.26b), there will be an additional creep caused
by the weight of the rod. For linearly viscoelastic behavior this limitation can be easily corrected.
3.3.4 Nano/Microindentation
for Measurements
of Viscoelastic Properties
of Small Amounts of Material
It is often necessary, as in a developmental research environment, to determine viscoelastic properties when
only very small or thin specimens are available. The
nanoindentation technique developed over the past two
decades [3.78–80] has been demonstrated to be effective in such cases where thin films or microstructural
domains in homogeneous or inhomogeneous solids are
concerned. Methods have been established for the measurements of properties such as the Young’s modulus
for materials exhibiting time- or rate-insensitive behavior. Under the assumption that unloading induces
only elastic recovery, Oliver and Pharr [3.80] pioneered
a method to measure Young’s modulus of time- or
strain-rate-independent materials, using an assumed or
known Poisson’s ratio. This method, which is based
primarily on Sneddon’s solution [3.81], can measure
properties such as Young’s modulus and harness without the need to measure directly the projected areas of
permanent indent impressions in an inelastic solids by
employing a modified or equivalent linearly elastic material response. While such methods work well for timeor rate-independent materials (metals, ceramics, etc.),
applying these methods directly – i. e., without proper
modifications – to viscoelastic materials is not appropriate. For example, the unloading curve in viscoelastic
materials sometimes has a negative slope [3.82] under
Mechanics of Polymers: Viscoelasticity
a)
a
α
R
Hc H
O
r
77
tation of a rigid, axisymmetric indenter pressed into
a homogeneous, linearly elastic and isotropic halfspace. The indentation depth H (Fig. 3.27) of the
axisymmetric indenter tip is represented in terms of the
indenter geometry by
b)
Z
3.3 Measurements and Methods
H
Fig. 3.27 (a) A conical indenter and (b) a spherical indenter
1
H=
0
Measurements of Viscoelastic Functions
in the Time Domain
Nanoindentation into a bulk material can often be considered as a process of indenting a half-space with
a rigid indenter. Typically, indenters are made of diamond, so that their Young’s modulus is at least
two orders of magnitude greater than that for a typical viscoelastic material; the indenter can then be
considered to be rigid. Figure 3.27 shows a conical
indenter and a spherical indenter. In nanoindentation
testing, a pyramid-shaped indenter is often modeled
as a conical indenter with a cone angle that provides the same area-to-depth relationship as the actual
pyramidal indenter. As in the case of the Berkovich
indenter, it can be modeled as an axisymmetric conical indenter with an effective half-cone angle of
70.3◦ . This makes solutions for axisymmetric elastic indentation problems available for determining material
properties such as Young’s modulus with pyramidshaped indenters and the (linearly) viscoelastic behavior
of the material can be determined by way of the
load–displacement data obtained from indenting a viscoelastic solid.
Linearly Elastic Indentation Problem. Sneddon [3.81]
derived the load–displacement relation for the inden-
(3.84)
where z = f (x) is the shape function for an axisymmetric indenter, with x = r/a being the coordinate shown
in Fig. 3.27; the origin of the frame is coincident with
the indenter tip and a is the radius of the contact circle
at the depth Hc .
According to this analysis the load on an axisymmetric indenter is
P=
4Ga
1−ν
1
0
x 2 f (x) dx
,
√
1 − x2
(3.85)
where G and ν are the shear modulus and Poisson’s
ratio, respectively.
For a conical indenter one has z = f (x) = ax tan α,
so that (3.84) becomes
1
H = πa tan α ,
2
(3.86)
with the angle α defined as in Fig. 3.27a. The indentation load in (3.85) is then given by
P=
πGa2
tan α ,
1−ν
(3.87)
which, upon using (3.86), renders the load–depth relation for a conical indenter as
P=
4
G H2 .
π(1 − ν) tan α
(3.88)
Similarly, for the half-space indentation by a spherical
indenter, with the geometry shown in Fig.3.27b, the indenter shape function is z = f (x) = R − (R2 − a2 x 2 ),
where R is the sphere radius. Substituting into
(3.84) and (3.85), one finds the load–displacement
relation [3.86]
√
8 R
(3.89)
G H 3/2
P=
3(1 − ν)
under condition of a small H/R ratio, typically H/R <
0.2 (see below).
Part A 3.3
situations where small unloading rates and relatively
high loads are used for a material with pronounced viscoelastic effects.
Accordingly, special procedures have been developed in recent years to measure viscoelastic behavior –
relaxation modulus and creep compliance – for linearly
viscoelastic materials. Cheng et al. [3.83] developed
a method to determine viscoelastic properties using
a flat-punch indenter. Lu et al. [3.84] proposed methods to measure the creep compliance in the time domain
of solid polymers using either the Berkovich or spherical indenter. Huang et al. [3.85] developed methods to
measure the complex modulus in the frequency domain
using a spherical indenter. Some of these methods are
summarized and discussed below.
f (x) dx
,
√
1 − x2
78
Part A
Solid Mechanics Topics
The Linearly Viscoelastic Indentation Problem. For-
Part A 3.3
cing a rigid indenter into a linearly viscoelastic,
homogeneous half-space can be treated as a quasistatic
boundary value problem with a moving boundary between the indenter and the half-space, as the contact
area between the indenter and the half-space changes
with time. Note that because of the moving boundary condition the correspondence principle between
a linearly viscoelastic solution and a linearly elastic
solution is not applicable. To solve this problem, Lee
and Radok [3.87] suggested to find the time-dependent
stresses and deformations for an axisymmetric indenter through the use of a hereditary integral operator
based on the associated solution for a linearly elastic material. Applying this Lee–Radok method (e.g.,
see Riande et al. [3.88]) to (3.88) leads to the timedependent indentation depth for any load history that
does not produce a decrease in contact area (linearly
viscoelastic material)
π(1 − ν) tan α
H (t) =
4
t
2
dP(ξ)
J(t − ξ)
dξ .
dξ
0
P(t) = P0 h(t), where P0 is the magnitude of the indentation load, and h(t) is the Heaviside unit step function.
Substituting this into (3.90) for a conical indenter one
deduces the shear creep function from
J(t) =
4H 2 (t)
.
π(1 − ν)P0 tan α
Similarly, if the indentation load P(t) = P0 h(t) is
applied to a spherical indenter with (3.91) the shear
creep function is determined from
√
8 RH 3/2 (t)
.
(3.93)
J(t) =
3(1 − ν)P0
Indentation under a Constant Load Rate. With
Fig. 3.4 in mind we discuss first the case of determining
the creep compliance from the measured load–depth relation for a load increasing at a constant rate. Let the
load be P(t) = Ṗ0 t h(t), with Ṗ0 being the load rate
(mN/s or μN/s).
For a conical indenter, substitution of this P(t) into
(3.90) yields
(3.90)
where J(t) is the shear creep compliance at time t.
Radok [3.89], Lee and Radok [3.87], Hunter [3.90], and
Yang [3.91] have investigated the indentation into linearly viscoelastic materials with a spherical indenter.
For a rigid, spherical indenter with radius R, upon using
the hereditary integral in (3.90), the relation between
load and penetration depth is represented by
H
3/2
3(1 − ν)
(t) = √
8 R
t
dP(ξ)
J(t − ξ)
dξ .
dξ
0
(3.91)
Either (3.90) (conical indenter) or (3.91) (spherical indenter) can be used to determine the shear creep
compliance J(t) under a prescribed loading history, as
illustrated below. We note that Poisson’s ratio is assumed to be constant in the above derivation. In the
sequel we describe three monotonic load histories for
determining the creep compliance of a linearly viscoelastic material: (i) a step load, (ii) a constant load
rate, and (iii) a ramp loading with an initially constant
load rate.
Indentation under a Step Load. In the case of a step
load applied to the indenter, the load is represented by
(3.92)
H 2 (t) =
π(1 − ν) Ṗ0 tan α
4
t
J(t − ξ) dξ ,
(3.94)
0
which upon differentiation with respect to time yields
J(t) =
8H(t)
dH(t)
.
π(1 − ν)P0 tan α dt
(3.95)
Equation (3.95) determines the shear creep compliance
J(t) from the measured indentation depth history H(t).
This simplifies (for a constant load rate) to
8H(t)
dH
(3.96)
J(t) =
(t) .
π(1 − ν) tan α dP
For a spherical indenter, we have from (3.91)
H
3/2
3(1 − ν) Ṗ0
(t) =
√
8 R
t
J(t − θ) dθ .
(3.97)
0
Differentiation of (3.97) with respect to t yields
√
4 RH 1/2 (t) dH
(3.98)
,
J(t) =
(1 − ν) Ṗ0 dt
or, simplified,
√
4 RH 1/2 (t) dH
(t) .
J(t) =
(1 − ν)
dP
(3.99)
Mechanics of Polymers: Viscoelasticity
For loads increasing with constant rates, (3.96) and
(3.99) are the equations for deriving the creep function
using conical or spherical indenters, respectively. Both
equations require the derivative of the indentation depth
with respect to load. Since experimental data tends to
be scattered, the computation of the derivative dH/ dP
is prone to induce undesirable errors. An alternative
approach to determine the creep function under ramp
loading is, therefore, described next.
The representation of the creep function based on
the generalized Kelvin model is
N
Ji (1 − e−t/τi ) ,
Upon least-square fitting (3.104) to the experimentally
measured load–displacement curve one finds the set of
parameters J0 , J1 , . . . , JN and τ1 , τ2 , . . . , τ N (see again
Sect. 3.2.5 for the choice of τ1 , τ2 , . . . , τ N ), which define the creep compliance.
Ramp Loading Histories. As noted in Sect. 3.2.6, an
where J0 , J1 , . . . , JN are compliance values, τ1 , τ2 ,
. . . , τ N are the retardation times, and N is a positive
integer. Substituting this into (3.94) for the conical indenter results in
N
1
Ji t
H 2 (t) = π(1 − nu) Ṗ0 tan α J0 +
4
i=1
N
t
−
Ji τi 1 − e τi
(3.101)
.
−
i=1
For P(t) = Ṗ0 · t, (3.101) can be rewritten as
N
1
H 2 (t) = π(1 − ν) tan α J0 +
Ji P(t)
4
i=1
N
P(t)
−
−
Ji (ν0 τi ) 1 − e Ṗ0 τi
(3.102)
.
i=1
If the experimentally measured nanoindentation load–
displacement curve is (least-squares) fitted to (3.102),
a set of best-fit parameters J0 , J1 , . . . , JN and
τ1 , τ2 , . . . , τ N can be determined (Sect. 3.2.5 with respect to the choice of τ1 , τ2 , . . . , τ N ). These constants
define the shear creep compliance (3.100).
The same method for data reduction can be applied
to a spherical indenter. With the substitution of (3.100)
into (3.91) this leads to
i=1
(3.104)
i=1
(3.100)
i=1
N
3(1 − ν) Ṗ0
3/2
Ji t
J0 +
H (t) =
√
8 R
i=1
N
−t
Ji τi 1 − e τi
.
−
Since P(t) = Ṗ0 t again, (3.103) becomes
N
3(1 − ν)
3/2
H (t) = √
Ji P(t)
J0 +
8 R
i=1
N
− P(t)
Ji ( Ṗ0 τi ) 1 − e Ṗ0 τi
.
−
ideal step load history cannot be generated in laboratory
tests. Instead one typically uses a ramp loading with
a very short rise time t0 first (usually t0 is on the order of 1–2 s) and a constant load thereafter (Fig. 3.4).
This observation applies equally to large test specimens
(see Sect. 3.2.6) and to nanoindentations. Following
then the developments in Sect. 3.2.6, (3.92) and (3.93)
may be used to determine the creep function starting
from a certain time after the constant load is reached.
However, this period of time, which is conservatively
chosen as five to ten times the rise time, can be a significant portion if the total time scale available is not large.
To avoid or at least minimize the loss of the corresponding data, one can correct the initial portion of the
data to find the creep compliance between the test starting time and ten times the rise time using the approach
proposed by Lee and Knauss [3.32] or by Flory and
McKenna [3.33].
Based on the Boltzmann superposition principle
and with reference to Fig. 3.4, a realistic loading
can be considered as P(t) = P1 (t) − P2 (t) = Ṗ0 t h(t) −
Ṗ0 (t − t0 )h(t − t0 ), where Ṗ0 is again a constant loading/unloading rate. For a conical indenter, from (3.90),
we have
π(1 − ν) Ṗ0 tan α
H (t) =
4
t
J(ξ) dξ ;
2
(t < t0 ) ,
0
(3.105)
H 2 (t) =
(3.103)
79
π(1 − ν) Ṗ0 tan α
4
t−t0
t
J(ξ) dξ −
J(ξ) dξ ;
×
0
(t ≥ t0 ) .
0
(3.106)
Part A 3.3
J(t) = J0 +
3.3 Measurements and Methods
80
Part A
Solid Mechanics Topics
Differentiation of (3.105) and (3.106) with respect to
time t yields
J(t) =
dH(t)
8H(t)
; (t < t0 ) ,
π(1 − ν) Ṗ0 tan α dt
J(t − t0 ) = J(t) −
(t ≥ t0 ) .
(3.107)
dH(t)
8H(t)
;
π(1 − ν) Ṗ0 tan α dt
(3.108)
Part A 3.3
Similarly, for a spherical indenter, the following results
are obtained:
√
4 RH 1/2 (t) dH(t)
J(t) =
(3.109)
; (t < t0 ) ,
dt
(1 − ν) Ṗ0
√
4 RH 1/2 (t) dH(t)
J(t − t0 ) = J(t) −
; (t ≥ t0 ) .
dt
(1 − ν) Ṗ0
(3.110)
Therefore, the procedure of data correction could be
considered as backward recursion starting at some time,
for example, ten times the rise time t0 . For a conical
indenter, using (3.107) and (3.108), the creep function
determined by (3.92) can be corrected through the following steps:
1. For kt0 ≤ t ≤ (k + 1)t0 with k ≥ 10 being a positive integer, compute J(t − t0 ) at t = kt0 + mλt0
by (3.108); the result of J(t) is calculated using
(3.92), where λ is some sufficiently small number,
m is an increasing integer from 1, and 0 < m ≤ 1/λ.
Note that λt0 is the time increment used in backward
recursion.
2. For (k − 1)t0 ≤ t ≤ kt0 , compute J(t − t0 ) at t = (k −
1)t0 + mλt0 by (3.108) and the result from (1).
3. Repeat the same step as (2) for (n − 1)t0 ≤ t ≤ nt0 ,
where n = k − 1, k − 2, . . . , 3.
4. For 0 ≤ t < t0 compute J(t) by (3.107).
For a spherical indenter, the same method can be
used to augment the initial part of creep function.
Simply replace (3.92), (3.107), and (3.108) in (1)–(4)
for a conical indenter by (3.93), (3.109), and (3.110),
respectively.
Limitations of Micro/Nanoindentation in the Determination of Linearly Viscoelastic Functions. Nanoin-
dentation uses sharp, pointed indenters to penetrate
into a test specimen, and leads to relatively large
deformations under the indenter tip, especially when
a Berkovich indenter is used. Since viscoelastic materials often exhibit nonlinear behavior at strains larger
than ≈ 0.5%, it is expected that nonlinearly viscoelastic deformations arise. Linearly viscoelastic analysis
should thus be considered a first-order approximation
for measuring linearly viscoelastic functions. Indeed,
the linearly viscoelastic analysis has been shown to
be a good approximation under a variety of situations.
For example, Cheng et al. [3.83] have determined that
the standard linear solid model can be appropriate for
some polymers if a sufficiently small time range is
involved. Hutcheson and McKenna [3.92] found that
linearly viscoelastic analysis is applicable to the embedment of nanospheres into a polystyrene surface as
demonstrated on data obtained by Teichroeb; and Forrest [3.93] and Oyen [3.94] have demonstrated that
linearly viscoelastic analysis is appropriate for at least
some materials under spherical nanoindentation. On the
other hand, others have found that linearly viscoelastic analysis is not applicable to some materials or under
particular conditions: Thus, in an early application of
indentation to viscoelastic properties determination, Valandingham et al. [3.95] found for several polymers
that the relaxation modulus as determined from differently sized step displacements depended on their
magnitude. Since linearly viscoelastic functions are
considered to be properties – i. e., they should be independent of the stress and of the deformation amplitude
– in nano/microindentation measurements this would
seem to be an indication that nonlinear response is
involved. If interest rests on the linearly viscoelastic
functions one should ensure that the measurement results are independent of load or deformation level.
A comment is in order with respect to the shortterm or glassy response in such measurements. It is
noted from (3.96) and (3.99) that the instantaneous
shear creep compliance is zero at time t = 0 because
h(0) = 0 under loading at a constant load rate. Polymers
normally have nonzero instantaneous creep compliance.
The error on the instantaneous creep compliance is the
result of the limitation in the viscoelastic analysis since
the solution is singular due to the sharp point discontinuity of the tip at zero indentation depth. It is found,
however, that after passing the initial loading stage,
the creep compliance typically increases with time, and
approaches the value representing the viscoelastic behavior. For the initial contact in nanoindentation, the
solution details of the viscoelastic problem are rather
complex, involving the effects of (molecular) repulsion,
adhesion, and friction, as well as initial plowing through
the material. An analysis that takes into account all of
these factors might be necessary to develop a method
to determine the instantaneous creep compliance. How-
Mechanics of Polymers: Viscoelasticity
3.3 Measurements and Methods
ever, experience at a much larger length scale tells us
that such an expectation is not well placed. Also, from
a purely operational point of view in consideration of
the fact that nanoindenters cannot provide accurate information for very small depths (of the order of 50 nm
or less) data for the creep function at short times are
usually not very accurate.
point below). Loubet et al. [3.96] presented the following equations to compute the complex modulus E ∗ (ω)
Specimen Preparation. The method(s) described above
where E and E are the uniaxial storage modulus and
the loss modulus, respectively. S is a contact stiffness
defined as the local slope of the relation between the
load and the penetration depth, dP/ dH, C a damping
coefficient defined through the instrument software as
the ratio of the load to the penetration rate, C = P/ Ḣ,
and A the contact area between the indenter and the
workpiece as determined from the penetration depth and
the indenter geometry. This method was employed in
the quoted reference [3.96], for example, to measure the
complex modulus of polyisoprene.
As this work took no particular note of the issues associated with the viscoelastic effects resulting
from decreasing contact during part of the load cycle,
the method is suspect. Therefore, Huang et al. [3.85]
conducted measurements, using also an MTS Nano
Indenter XP system, which was also equipped with
a continuous stiffness module, but with the specific
intent of elucidating the need to bring viscoelasticity
theory in accord with the test conditions (contact retention). This was accomplished for the spherical indenter
shown in Fig. 3.27b.
Leaving the details of development to the reader’s
individual study, we go to the heart of the matter by
pointing out that experimental provisions need to be
made to prevent the occurrence of reduction in contact between the indenter and the substrate. Huang et al.
provided for this by imposing a preload (carrier load)
onto which a much smaller harmonic load was superposed. This is accomplished through either a constant
(creep) load or through a load that increases at a constant rate. We record first the results for the constant
carrier load and then for the constant carrier load rate,
after which the conditions for nondecreasing contact
area are stated.
Consider then a sinusoidal indentation load superimposed on a step loading, represented by
Measurements of Viscoelastic Functions
in the Frequency Domain
To illustrate the current state of development with
nanoindentation equipment and data interpretation we
review here briefly earlier studies that suffer from an inadequate attention to the details of viscoelastic vis-à-vis
elastic analysis. Loubet et al. [3.96] proposed a method
to determine the complex modulus of viscoelastic materials with the aid of an MTS Nano Indenter XP system
coupled with a continuous stiffness module (CSM).
The CSM allows cyclic excitation in load or displacement and the recording of the resulting displacement or
load [3.97]. The indentation displacement response and
the out-of-phase angle between the applied harmonic
force and the corresponding harmonic displacement are
measured continuously at a given excitation frequency.
For the subsequent discussion the reader is again alerted
to the fact that currently available indentation solutions
require non-decreasing contact area between the material and the indenter. When that condition cannot be
guaranteed, the measurement results must be considered
suspect and usually require careful examination and
evaluation (see the earlier caveat-discussion on transients in Sect. 3.2.6 as well as further discussion on this
P(t) = Pm + h(t)ΔP0 sin ωt ,
√
πS
E = √
2 A
(3.111)
(3.112)
where Pm is the (constant) carrier or main load, and
ΔP0 is the amplitude of the harmonic load. Inserting
Part A 3.3
for nanoindentation/microindentation on polymers assumes that the material is in its natural, stress-free state
as the reference configuration. Specimens need to be
prepared carefully prior to the start of measurements.
They typically need to be annealed at a temperature
in a range of ±10 ◦ C of the glass-transition temperature for 2 h or longer to remove any residual stress;
they then need to be cooled slowly (typical cooling
rates ≈ 5 ◦ C/min) to room or the test temperature. The
physical aging time must be maintained at the same
value for all tests to produce consistent results, unless
of course the effect of physical aging time is under
study. The room temperature has to be recorded, as well
as the room humidity, which needs to be controlled
to a constant value using a humidifier/dehumidifier
if the temperature control unit does not offer this
capability.
E ∗ (ω) = E + iE , with
√
πCω
and E = √ ,
2 A
81
82
Part A
Solid Mechanics Topics
(3.112) into (3.91), we have
3(1 − ν)
H 3/2 (t) = √
8 R
t
× Pm J(t) + ωΔP0 J(t − θ) cos ωθ dθ .
Following similar procedures as in deriving (3.119),
the formulae to determine the complex compliance can
also be derived under the condition that the time t has
evolved to a value such that Hm (t) ΔH0 . Substituting
(3.119) into (3.91) for the spherical indenter, one has
then
0
√
(3.113)
Part A 3.3
The contact radius is a(t) = RH(t) for H(t) R.
After the loading transients have died out (see the discussion in Sect. 3.2.6), one finds
3(1 − ν) Pm J(t)
H 3/2 (t) = √
8 R
+ ΔP0 [J (ω) sin ωt − J (ω) cos ωt] .
(3.114)
with J (ω) and J (ω) denoting the storage and loss
compliances in shear, respectively. If Hm (t) denotes the
carrier displacement component, and ΔH0 is the amplitude of the harmonic displacement component, the
displacement from (3.112) is in the form
H(t) = Hm (t) + ΔH0 sin(ωt − δ) ,
(3.115)
where δ is the phase angle between the harmonic force
and the ensuing displacement, ΔH0 is of the order of
a few nanometers while Hm (t) (from the step loading)
is on the order of a few hundreds of nanometers. Assuming that this implies that no loss in contact occurs
and that ΔH0 Hm (t), (3.115) leads to
3 1/2
3/2
H 3/2 (t) = Hm (t) + Hm (t)ΔH0 cos δ sin ωt
2
3 1/2
− Hm (t)ΔH0 sin δ cos ωt + o(ΔH0 ) ,
2
(3.116)
where o(ΔH0 ) indicates the higher-order terms in ΔH0 ,
which are negligible as long as ΔH0 Hm (t). Comparing (3.116) with (3.114), one finds for the constant
carrier load that
3(1 − ν)
3/2
(3.117)
Pm J(t) ,
Hm (t) = √
8 R
√
1/2
4 R Hm (t)ΔH0
J (ω) =
cos δ , and
1−ν
ΔP0
√
1/2
4 R Hm (t)ΔH0
J (ω) =
sin δ .
(3.118)
1−ν
ΔP0
The alternative loading condition in which a small
sinusoidal load is superimposed upon a carrier loading
increasing at a constant rate Ṗ0 , i. e.,
P(t) = Ṗ0 t + h(t)ΔP0 sin ωt .
(3.119)
H 3/2 (t) =
3(1 − ν)
Ṗ0
√
8 R
t
J(t − θ) dθ
0
+ ΔP0 [J (ω) sin ωt − J (ω) cos ωt] .
(3.120)
Upon comparing (3.120) with (3.116), the same formulas as in (3.118) for the complex compliance can be
derived for a small oscillatory load that is superimposed
upon a constant-rate carrier load.
We next provide conditions on the load magnitude(s) under which nondecreasing contact area is
maintained so that the solution derived from the Lee–
Radok approach is valid. These conditions are sufficient
because they are imposed such that the total load rate
does not become negative, although it is conceivable
that a small negative load rate does not necessarily lead
to a reduction in contact area. Note that similar argumentation cannot be used if the prescribed loading is in
the form of displacement histories.
For a harmonic loading superimposed on a step
loading one ensures (small) positive loading rates by requiring that, for each arbitrary time interval, say half
a harmonic cycle, the indentation rate due to the constant carrier load exceeds temporary unloading. From
(3.115) the contact area will be nondecreasing during
the whole process, as long as the frequency does not
exceed the critical value ωc = Ḣm /ΔH0 . A value for
Ḣm may be estimated from (3.117) as if the relation
described an elastic half-space. For higher frequencies
a temporary decrease in the contact is likely as a result
of the applied harmonic load so that the Ting approach
should be adopted. Nevertheless, when the frequency
exceeds the critical value by a small amount (ω > ωc ),
the solutions derived from the methods by Lee and
Radok [3.87] and by Ting [3.86] are still very close,
even though the condition for the Lee–Radok approach
is not strictly fulfilled. Since a closed-form solution derived from the Lee–Radok approach exists, while only
numerical solutions can be obtained using the Ting
approach, the formulas derived for a harmonic superimposed on a step loading from the Lee–Radok approach
can then still be used to estimate the complex viscoelas-
Mechanics of Polymers: Viscoelasticity
a) Storage modulus (GPa)
value, indicating considerable uncertainty associated
with the method by Loubet et al. [3.96] as summarized
by (3.111) for measuring the storage modulus. This discrepancy exists for both PC and for PMMA.
3.3.5 Photoviscoelasticity
A classical tool for determining strain and stress
distributions in two-dimensional geometries is the
photoelastic method [3.98]. For three-dimensional geometries the method required slicing the body into
sections and treat each two-dimensional section/slice
separately and sequentially. While the early application of this technique employed relatively rigid
polymers such as homalite (a polyester) or polystyrene
with glass temperatures above 100 ◦ C, also softer
and photoelastically more sensitive materials such as
polyurethane elastomers have been employed [3.99].
This method was found useful in both quasistatic as
well as dynamic applications when wave mechanics
was an important consideration [3.100]. With respect
to viscoelastic responses it is important to consider
the time scale of the measurements relative to time
of the test material. Rigid polymers are stiff because their dominant relaxation processes occur slowly
around typical laboratory temperatures, so that timedependent issues are not of much concern. On the
other hand, they should be of concern if observations extend over long time periods measured in weeks
and months if the relaxation times at the prevailb) Storage modulus (GPa)
8
8
7
7
6
6
5
5
4
4
3
3
Nanoindentation (2004)
Conventional (DMA)
Nanoindentation (1995)
2
0
Nanoindentation (2004)
Conventional (DMA)
Nanoindentation (1995)
2
1
1
0
25
50
75
100
125
150
Time (s)
83
0
0
25
50
75
100
125
150
Time (s)
Fig. 3.28a,b Comparison of the storage compliance at 75 Hz computed by three methods for (a) PC and (b) PMMA
Part A 3.3
tic functions in the regime of linear viscoelasticity when
ω > ωc .
Next consider the carrier load to increase at a constant rate Ṗ0 . Differentiation of (3.119) with respect
to time guarantees a positive loading rate as long as
Ṗ0 ≥ ΔP0 ω. Additionally, the substitution
√ of this inequality into (3.91) together with a(t) = RH(t) shows
that the contact area will then also not decrease during
the entire indentation history.
Figure 3.28 shows a comparison of these developments with an application of (3.111) [3.96] under the
assumption of a constant Poisson ratio: when measurements over a relatively short time (such as ≈ 250 s
used in this study) are made, the Poisson’s ratio [3.15]
does not change significantly for polymers in the glassy
state, such as PMMA or polycarbonate (PC) and thus
introduces negligible errors in the complex compliance
data. To compute the complex modulus of PC and
polymethyl methacrylate (PMMA) at 75 Hz, data were
acquired continuously at this frequency for ≈ 125 s.
In general the data increase correctly with time, and
approach a nearly constant value for each material.
These constant values are considered to represent the
steady state and are quoted as the storage modulus. Also
shown for comparison in Fig. 3.28 are data measured
with the aid of conventional dynamic mechanical analysis (DMA) for the same batch of PC and PMMA.
The uniaxial storage modulus of PC measured by DMA
at 0.75 Hz is 2.29 GPa. However, the storage modulus
computed using (3.111) is at least 40% higher than this
3.3 Measurements and Methods
84
Part A
Solid Mechanics Topics
ing temperatures are of the same order of magnitude.
Because dynamic events occur in still shorter time
frames wave mechanics typically little concern in this
regard.
The situation is quite different when soft or elastomeric polymers serve as photoelastic model materials.
In that case quasistatic environments (around room
temperature) typically involve only the long-term or
rubbery behavior of the material with the stiffness measured in terms of the rubbery or long-term equilibrium
modulus. On the other hand, when wave propagation
phenomena are part of the investigation, the longest
relaxation times (relaxation times that govern the tran-
sition to purely elastic behavior for the relatively very
long times) are likely to be excited so that the output of
the measurements must consider the effect of viscoelastic response.
It is beyond the scope of this presentation to delineate the full details of the use of viscoelastically
photoelastic material behavior, especially since during
the past few years investigators have shown a strong
inclination to use alternative tools. However, it seems
useful to include a list of references from which the
evolution of this topic as well as its current status may
be explored. These are listed as a separate group in
Sect. 3.6.1 under References on Photoviscoelasticity.
Part A 3.4
3.4 Nonlinearly Viscoelastic Material Characterization
Viscoelastic materials are often employed under conditions fostering nonlinear behavior. In contrast to the
mutual independence in the dilatational and deviatoric
responses in a linearly viscoelastic material, the viscoelastic responses in different directions are coupled
and must be investigated in multiaxial loading conditions. Most results published in the literature are
restricted to investigating the viscoelastic behavior in
the uniaxial stress or uniaxial strain states [3.101,
102] and few results are reported for time-dependent
multiaxial behavior [3.103–105]. Note that BauwensCrowet’s study [3.104] incorporates the effect of
pressure on the viscoelastic behavior but not in the
data analysis, simply as a result of using uniaxial
compression deformations. Along similar lines Knauss,
Emri, and collaborators [3.106–110] provided a series of studies deriving nonlinear viscoelastic behavior
from changes in the dilatation (free-volume change)
which correlated well with experiments and gave at
least a partial physical interpretation to the Schapery
scheme [3.111, 112] for shifting linearly viscoelastic
data in accordance with a stress or strain state. The
studies became the precursors to investigate the effect
of shear stresses or strains on nonlinear behavior as
described below. Thus the proper interpretation of the
uniaxial data as well as their generalization to multiaxial stress or deformation states is highly questionable.
This remains true regardless of the fact that such data
interpretation has been incorporated into commercially
available computer codes. Certainly, there are very few
engineering situations where structural material use is
limited to uniaxial states. In this section we describe
some aspects of nonlinearly viscoelastic behavior in
the multiaxial stress state. References regarding nonlinear behavior in the context of uniaxial deformations
are too numerous to list here. The reader is advised
to consult the following journals: the Journal of Polymer, Applied Polymer Science, Polymer Engineering
and Science, the Journal of Materials Science and Mechanics of Time-Dependent Materials, to list the most
prevalent ones.
3.4.1 Visual Assessment
of Nonlinear Behavior
Although it is clear that even under small deformations
entailing linearly viscoelastic behavior the imposition
of a constant strain rate on a tensile or compression
specimen results in a stress response that is not linearly
related to the deformation when the relation is established in real time (not on a logarithmic time scale).
Because such responses that appear nonlinear on paper
are not necessarily indicative of nonlinear constitutive
behavior, it warrants a brief exposition of how nonlinear behavior is unequivocally separated from the linear
type.
To demonstrate the nonlinear behavior of a material, consider first isochronal behavior of a linearly
viscoelastic material. Although isochronal behavior can
be obtained for different deformation or stress histories,
consider the case of shear creep under various stress levels σn , so that the corresponding strain is εn = J(t)σn
for any time t. Consider an arbitrary but fixed time t ∗ ,
at which time the ratio
εn /σn = J(t ∗ )
(3.121)
Mechanics of Polymers: Viscoelasticity
Shear stress (MPa)
16
14
t = 10s
12
t = 104 s
10
ial. These values are likely to be different for other
materials.
3.4.2 Characterization
of Nonlinearly Viscoelastic Behavior
Under Biaxial Stress States
In the following sections, we describe several ways of
measuring nonlinearly viscoelastic behavior in multiaxial situations.
Hollow Cylinder under Axial/Torsional Loading
A hollow cylinder under axial/torsional loading conditions provides a vehicle for investigating the nonlinearly
viscoelastic behavior under multiaxial loading conditions. Figure 3.30 shows a schematic diagram of
a cylinder specimen. Dimensions can be prescribed
corresponding to the load and deformation range of
interest as allowed by an axial/torsional buckling
analysis.
Two examples are given here for specimen dimensions. With the use of a specimen with outer diameter
of 22.23 mm, a wall thickness of 1.59 mm, and a test
length of 88.9 mm, the ratio of the wall thickness to
the radius is 0.14. These specimens can reach a surface
shear strain on the order of 4.0–4.5%. With the use of
an outer diameter of 25.15 mm, a thickness of 3.18 mm,
and a test length of 76.2 mm, the ratio of the wall thickness to the radius is 0.29. This allows a maximum shear
strain prior to buckling in the range of 8.5–12.5% based
on elastic analysis. The actual maximum shear strain
that can be achieved prior to buckling can be slightly
different due to the viscoelastic effects involved in the
material. Estimates of strains leading to buckling may
be achieved by considering a Young’s modulus for the
material that corresponds to the lowest value achieved
at the test temperature and the time period of interest
for the measurements.
8
x
6
4
2
0
y
0
0.01
0.02
0.03
Shear strain
Fig. 3.29 Isochronal shear stress–shear strain relation of
PMMA at 80 ◦ C
85
D
O
z
Fig. 3.30 A thinwalled cylinder
specimen for
combined tension/compression
and torsion to
generate biaxial stress
states [3.113]
Part A 3.4
takes on a particular property value. At that time all possible values of σn and εn are related linearly: a plot
of σ versus ε at time t ∗ renders a linear relation with
slope 1/J(t ∗ ) and encompassing the origin. For different times t ∗ , straight lines with different slopes result
and the linearly viscoelastic material can thus be characterized by a fan of straight lines emanating from the
origin, the slope of each line corresponding to a different time t ∗ . The slopes decrease monotonically as
these times increase. Each straight line is called a linear isochronal stress–strain relation for the particular
time t ∗ .
Figure 3.29 shows such an isochronal representation for PMMA. It is seen that, at short times and when
the strains are small in creep (shear strain 0.005, shear
stress 8 MPa), the material response is close to linearly
viscoelastic where all the data stay within the linear fan
formed, in this case, by the upper line derived from
the shear creep compliance at 10 s, and the lower line
corresponding to the compliance in shear at 104 s. At
the higher stress levels and at longer times, when the
strains are larger, material nonlinearity becomes pronounced, as data points in Fig. 3.29 are outside the
linear fan emanating from the origin. In this isochronal
plot, the deviation from linearly viscoelastic behavior
begins at approximately 0.5% strain level. Isochronal
data at other temperatures indicate also that the nonlinearity occurs at ≈ 0.5% strain and a shear stress
of about 7.6 MPa at all temperatures for this mater-
3.4 Nonlinearly Viscoelastic Material Characterization
86
Part A
Solid Mechanics Topics
Part A 3.4
Application of Digital Image Correlation
The use of strain gages for determining surface strains
on a polymer specimen is fraught with problems, since
strain gages tend to be much stiffer than the polymer
undergoing time-dependent deformations, and, in addition, the potential for increases in local temperature
due to the currents in the strain gage complicates definitive data evaluation. Digital image correlation (DIC,
Chap. 20) thus offers a perfect tool, though that method
is not directly applicable to cylindrical surfaces as typically employed. While we abstain from a detailed
review of this method in this context (we refer the reader
to [3.114] for particulars), here it is of interest for the
completeness of presentation only to summarize this
special application to cylindrical surface applications.
The results are presented in the form of (apparent) creep
compliances defined by 2ε(t)/τ0 . We emphasize again
that the creep compliance for a linear material is a function that depends only on time but not on the applied
stress. This no longer holds in the nonlinearly viscoelastic regime, but we adhere to the use of this ratio as
a creep compliance for convenience.
To use DIC for tracking axial, circumferential, and
shear strains on a cylindrical surface, a speckle pattern
is projected onto the specimen surface. While the same
image acquisition system can be used as for flat images
special allowance needs to be made for the motion of
surface speckles on a cylindrical surface, the orientation of which is also not known a priori. If the focal
length of the imaging device is long compared to the
radius of the cylinder, an image can be considered as
a projection of a cylinder onto an observation plane.
Planar deformations can be determined using digital im-
age correlation techniques [3.115, 116], and corrected
for curvature to determine the axial, circumferential,
and shear strains [3.114]. To assure that the motion is
properly interpreted in a cylindrical coordinate system
– that the camera axis is effectively very well aligned
with the cylinder axis and test frame orientation – the
imaging system must also establish the axis of rotation.
This can be achieved through offsetting the specimen
against a darker background (Fig. 3.31) so as to ensure sufficient contrast between the specimen edge and
background for identification of any inclination of the
cylinder axis relative to the reference axis within the
image recording system. The axis orientation is then
also evaluated using the principles of digital image correlation. Without such a determination the parameters
identifying the projection of the cylindrical surface onto
a plane lead to uncontrollable errors in the data interpretation. The details of the relevant data manipulation can
be found in the cited references.
Specimen Preparation
Specimens can be machined from solid cylinders or
from tubes, though tubular specimens tend to have
a different molecular orientation because of the extrusion process. Prior to machining, the cylinders need to
be annealed at a temperature near the glass-transition
temperature to remove residual stresses. The thinwalled cylinder samples need to be annealed again after
machining to remove or reduce residual surface stresses
possibly acquired during turning. To avoid excessive
gravity deformations, annealing is best conducted in
an oil bath. Any possible weight gain must be monitored with a balance possessing sufficient resolution.
The weight gain should be low enough to avoid any
effect of the oil on the viscoelastic behavior of materials. For testing in the glassy state, specimens must have
about the same aging times; and the aging times should
be at least a few days so that during measurements
the aging time change is not significant (on a logarithmic scale). Because physical aging is such an important
topic we devote further comments to it in the next subsection. Prior to experiments samples need to be kept in
an environment with a constant relative humidity that is
the same as the relative humidity during measurements.
The relative humidity can be generated through a saturated salt solution in an enclosed container [3.118].
Physical Aging in Specimen Preparation. When an
Fig. 3.31 A typical speckle pattern on a cylinder surface
inclined with respect to the observation axis of the imaging
system
amorphous polymer is cooled (continuously) from its
melt state, its volume will deviate from its equilibrium state at the glass-transition temperature (Fig. 3.12).
Mechanics of Polymers: Viscoelasticity
87
the time required to attain equilibrium after quenching within practical limits. The value of t ∗ may have
to be determined prior to commencing characterization tests. If the viscoelastic properties are investigated
without paying attention to the aging process, characterization of polymers and their composites are not likely
to generate repeatable results. For characterization of
the long-term viscoelastic behavior through accelerated
testing, physical aging effects have to be considered,
in addition to time–temperature superposition and other
mechanisms.
An Example of Nonlinearly Viscoelastic
Behavior under Combined Axial/Shear Stresses
Figure 3.32 shows the creep response in pure shear
for PMMA at 80 ◦ C [3.113, 117]. The axial force was
controlled to be zero in these measurements. The plotted shear creep compliance was converted from the
relaxation modulus in shear under infinitesimal deformation, representing the creep behavior in the linearly
viscoelastic regime. For a material that behaves linearly viscoelastically, all curves should be coincident in
this plot. In the case of data at these stress levels, the
deformations in shear at higher stress levels are accelerated relative to the behavior at infinitesimal strains. This
observation constitutes another criterion for separating
linear from nonlinear response.
To represent the nonlinear characteristics we draw
on the isochronal representation discussed above. At
any given time spanned in Fig. 3.32, there are five data
points from creep under a pure shear stress, giving four
sets of isochronal stress/strain data. Plotting these four
log (shear creep compliance) (1/MPa)
–2.2
–2.4
σ = 0, τ = 16 MPa
σ = 0, τ = 14.7 MPa
σ = 0, τ = 12.3 MPa
σ = 0, τ = 9.4 MPa
T = 80°C
–2.6
–2.8
Inversion from µ(t)
–3
–3.2
0.5
1
1.5
2
2.5
3
3.5
4
4.5
log (time) (s)
Fig. 3.32 Shear creep compliance of PMMA at several levels of shear stress at 80 ◦ C (after [3.117])
Part A 3.4
Polymers have different viscoelastic characteristics depending on whether they are below the glass-transition
temperature (Tg ), in the glass-transition region (in the
neighborhood of Tg ), or in the rubbery state (above
Tg ). In the rubbery state a polymer is in or near thermodynamic equilibrium, where long-range cooperative
motions of long-chain molecules are dominant and result in translational movements of molecules. Below the
glass-transition temperature, short-range motions in the
form of side-chain motions and rotations of segments
of the main chain (primarily in long-term behavior)
are dominant. The glass-transition range depends on
the cooling rate. After cooling a polymer initially in
the rubbery state to an isothermal condition in the
glassy state, the polymer enters a thermodynamically
nonequilibrium, or metastable, state associated with
a smaller density than an optimal condition (equilibrium) would allow. In the equilibrium state the density
would increase continuously to its maximum value. If
the temperature in the isothermal condition is near Tg ,
the density increase can occur in a relatively short time,
but if the temperature is far below Tg this process occurs
over a long period of time, on the order of days, weeks,
or months. Prior to reaching the maximum density,
as time evolves, depending on how long this process
has taken place, the polymer possesses a different viscoelastic response. This phenomenon is called physical
aging because no chemical changes occur. The time after quenching to an isothermal condition in the glassy
state is called aging time.
The viscoelastic functions (e.g., bulk and shear relaxation moduli) change during aging until that process
is complete within practical time limitations. The effect
of physical aging is similar to a continual decrease of
the temperature and results in the reduction of the free
volume that provides the space for the mobility of the
polymer chain segments as the chain undergoes any rearrangement. There now exists a relatively large body
of information on physical aging and the reader is referred to a number of representative publications, in
which references in the open literature expand on this
topic. References [3.38–44,119–122] showed that physical aging leads to an aging time factor multiplying the
external time, analogous to the temperature-dependent
multiplier (shift factor) for thermorheologically simple
solids in the context of linear viscoelasticity theory.
Elaborations of this theme for various materials have
been offered to a large extent by McKenna and by Gates
as well as their various collaborators
Effects of physical aging can be pronounced before aging time reaches the value, say, t ∗ , which is
3.4 Nonlinearly Viscoelastic Material Characterization
88
Part A
Solid Mechanics Topics
A–A
log(axial creep compliance) (1/MPa)
–2.2
Clamped with
bolt A – A
Glued for θ > 40°
–2.4
Tension + torsion
σ = 25.3 MPa, τ = 14.5 MPa
T = 50°C
–2.6
θ
–2.8
Compression + torsion
σ = 25.3 MPa, τ = 14.5 MPa
–3
Part A 3.4
–3.2
0.5
A
x
y
A
1
1.5
2
2.5
3
3.5
4
4.5
log (time) (s)
Fig. 3.33 Axial creep compliance of PMMA under tension/torsion and compression/torsion at 50 ◦ C
data points at each of the 16 fixed times, say, gives the
isochronal stress–strain relation shown in Fig. 3.29.
It is clear that the creep rate increases with an increase in applied shear stress, indicating nonlinear creep
behavior in shear.
We note that for isochronal behavior at strains
above 0.5%, there exists a fan emanating from the
shear strain 0.5% and a shear stress of 7.6 MPa.
The corresponding fan center is considered to be the
yield point, above which the creep rate is accelerTest section
10.16
R = 10.16
22.54
22.3
22.54
44.6
15.14
30.48
Fig. 3.34 Geometry of an Arcan specimen (all dimensions
are in mm, thickness is 3 mm)
Fig. 3.35 Fixture for testing Arcan specimens
ated measurably. It is of interest to note that the
creep process is more pronounced (accelerated) in
tension/torsion than under compression/torsion as illustrated in Fig. 3.33 for 50 ◦ C. We have already observed
that thin-walled cylinders tend to buckle under sufficiently high torsion and/or compression. A cylinder
with an outer diameter of 25.15 mm, a thickness of
3.18 mm, and a test length of 76.2 mm would buckle
at ≈ 5% shear strain under pure torsion. The use of
thicker-walled cylinders would reduce the homogeneity of the stress and strain within the cylinder wall
and lead to inaccuracy in the determination of stress
or strain. Other techniques, such as testing with the
Arcan specimen should, therefore, be used when the
nonlinearly viscoelastic behavior at larger deformations
is investigated.
Use of the Arcan Specimen
Arcan’s specimen [3.123–125] can be used for multibiaxial test with the use of a uniaxial material test
system. Figure 3.34 shows an Arcan specimen, and
Fig. 3.35 a corresponding test fixture. The loading axis
can form different angles with respect to the specimen axis so that biaxial stress states can be generated
in the region of uniform deformation in the middle of
the specimen. When the loading axis of the fixture is
aligned with the major specimen axis, this configura-
Mechanics of Polymers: Viscoelasticity
Fig. 3.36 Isochronal contours of creep strains under fixed
biaxial loading. Each contour corresponds to a different
time between 10 s and about 105 s. Ellipses correspond to
linear response characteristics
3.5 Closing Remarks
89
Normal strain
0.025
0.02
0.015
0.01
0.005
0
– 0.005
– 0.01
– 0.015
– 0.02
– 0.025
–0.03
–0.02
–0.01
0
0.01
0.02
0.03
Normal strain
show ellipses (a/b = 2) that would correspond to totally
linearly viscoelastic behavior.
3.5 Closing Remarks
As was stated at the very beginning, today’s laboratory and general engineering environment is bound to
involve polymers, whether of the rigid or the soft variety. The difference between these two derives merely
from the value of their glass-transition temperature
relative to the use temperature (usually room temperature). As illustrated in this chapter the linearized theory
of viscoelasticity is well understood and formulated
mathematically, even though its current application in
engineering designs is usually not on a par with this
understanding. A considerable degree of response estimation can be achieved with this knowledge, but
a serious deficiency arises from the fact that when structural failures are of concern the linearized theory soon
encounters limitations as nonlinear behavior is encountered.
There is, today, no counterpart nonlinear viscoelastic material description that parallels the plasticity
theory for metallic solids. Because the atomic structures
of metals and polymers are fundamentally different, it
would seem imprudent to characterize polymer nonlinear behavior along similar lines of physical reasoning
and mathematical formulation, notwithstanding the fact
that in uniaxial deformations permanent deformations
in metals and polymers may appear to be similar. That
similarity disappears as soon as temperature or extended
time scales follow an initially nonlinear deformation
history. It is becoming clear already that the superposition of dilatational stresses or volumetric strains has
a greater influence on nonlinear material response of
polymers than is true for metals. Consequently it would
seem questionable whether uniaxial tensile or compressive behavior would be a suitable method for assessing
nonlinear polymer response, since that stress state involves both shear and bulk (volumetric) components.
To support this observation one only needs to recall that
very small amounts of volume change can have a highly
disproportionate effect on the time dependence of the
material, as delineated in Sects. 3.2.8, 3.2.9, and 3.2.10.
This is well illustrated by the best known and large effect which a change in temperature has on the relaxation
times, where dilatational strains are indeed very small
compared to typical shear deformations; responses under pressure and with solvent swelling underscore this
observation.
The recent publication history for time-dependent
material behavior exhibits an increasing number of
papers dealing with nonlinear polymer behavior, indicating that efforts are underway to address this lack
of understanding in the engineering profession. At the
same time it is also becoming clear that the intrinsic time-dependent behavior of polymers is closely
Part A 3.5
tion induces shear forces applied to an Arcan specimen
so that there is a pure shear zone in the central portion of
the specimen. Other orientations allow the nonlinearly
viscoelastic shear behavior to be characterized under
loading conditions combining tension/shear, compression/shear, and pure shear.
The data processing is illustrated using the results
obtained by Knauss and Zhu [3.126,127] as an example.
Figure 3.36 shows isochronal creep shear and normal
strains at 80 ◦ C using an Arcan specimen under a nominal (maximum) shear stress of 19.3 MPa. At each fixed
time, line segments connect points to form an isochronal
strain contour. The innermost contour corresponds to
a creep time of 10 s, and the outermost contour is the results from 0.8 × 105 s. For comparison purposes we also
90
Part A
Solid Mechanics Topics
connected to the molecular processes that are well represented by the linearly viscoelastic characterization of
these solids. It is thus not unreasonable, in retrospect,
to have devoted a chapter mostly to describing linearly
viscoelastic solids with the expectation that this knowledge provides a necessary if not sufficient background
for dealing with future issues that need to be resolved in
the laboratory.
3.6 Recognizing Viscoelastic Solutions if the Elastic Solution is Known
Part A 3.6
Experimental work deals with a variety of situations/test
configurations for which boundary value histories are
not readily confined to a limited number of cases. For
example, when deformations are to be measured by
photoelasticity with the help of a viscoelastic, photosensitive material in a two-dimensional domain it may
be important to know the local stress state very well,
if knowing the stress state in a test configuration is
an important prerequisite for resolving an engineering
analysis problem.
There exists a large class of elastic boundary value
problems for which the distribution of stresses (or
strains) turns out to be independent of the material properties. In such cases the effect of loading and material
properties is expressed through a material-dependent
factor and a load factor, both multiplying a function(s)
that depends only on the spatial coordinates governing
the distribution of stress or strain. It then follows that
for the corresponding viscoelastic solution the distribution of stresses is also independent of the material
properties and that the time dependence is formulated
as the convolution of a material-dependent multiplicative function with the time-dependent load factored out
from the spatial distribution function(s).
In the experimental context beams and plates fall
into this category, though even the simple plate configuration can involve Poisson’s ratio in its deformation
field. More important is the class of simply connected
two-dimensional domains for which the in-plane stress
distribution is independent of the material properties.
Consider first two-dimensional, quasistatic problems with (only) traction boundary conditions prescribed on a simply connected domain. For such
problems the stress distribution of an elastic solid
throughout the interior is independent of the material properties. The same situation prevails for multiply
connected domains, provided the traction on each perforation is self-equilibrating. If the latter condition is
not satisfied, then a history-dependent Poisson function
enters the stress field description so that the stress distribution is, at best, only approximately independent of,
or insensitive to, the material behavior. This topic is
discussed in a slightly more detailed manner in [3.13].
3.6.1 Further Reading
For general background it appears useful to identify the
dominant publications to bolster one’s understanding of
the theory of viscoelasticity. To that end we summarize here first, without comment or reference number,
a list of publications in book or paper form, only one
of which appears as an explicit reference in the text,
namely the book by J.D. Ferry as part of the text development [3.45] with respect to the special topic of
thermorheologically simple solids.
1. T. Alfrey: Mechanical Behavior of High Polymers
(Interscience, New York, 1948)
2. B. Gross: Mathematical Structure of the Theories
of Viscoelasticity (Herrmann, Paris, 1953) (re-issued
1968)
3. A.V. Tobolsky: Properties and Structure of Polymers (Wiley, New York, 1960)
4. M.E. Gurtin, E. Sternberg: On the linear theory of
viscoelasticity, Arch. Rat. Mech. Anal. 11, 291–356
(1962)
5. F. Bueche: Physical Properties of Polymers (Interscience, New York, 1962)
6. M.L. Williams: The structural analysis of viscoelastic materials, AIAA J. 2, 785–809 (1964)
7. Flügge (Ed.): Encyclopedia of Physics VIa/3, M.J.
Leitman, G.M.C. Fischer: The linear theory of viscoelasticity (Springer, Berlin, Heidelberg, 1973)
8. J.J. Aklonis, W.J. MacKnight: Introduction to Polymer Viscoelasticity (Wiley, New York 1983)
9. N.W. Tschoegl: The Phenomenological Theory
of Linear Viscoelastic Behavior, an Introduction
(Springer, Berlin, 1989)
10. A. Drozdov: Viscoelastic Structures, Mechanics of
Growth and Aging (Academic, New York, 1998)
11. D.R. Bland: The Theory of Linear Viscoelasticity,
Int. Ser. Mon. Pure Appl. Math. 10 (Pergamon, New
York, 1960)
12. R.M. Christensen: Theory of Viscoelasticity: An Introduction (Academic, New York, 1971); see also
R.M. Christensen: Theory of Viscoelasticity An Introduction, 2nd ed. (Dover, New York, 1982)
Mechanics of Polymers: Viscoelasticity
17. C.W. Folkes: Two systems for automatic reduction of time-dependent photomechanics data, Exp.
Mech. 10, 64–71 (1970)
18. P.S. Theocaris: Phenomenological analysis of mechanical and optical behaviour of rheo-optically
simple materials. In: Photoelastic Effect and its applications, ed. by J. Kestens (Springer, Berlin New
York, 1975) pp. 146–152
19. B.D. Coleman, E.H. Dill: Photoviscoelasticity: Theory and practice. In: The Photoelastic Effect and
its Applications, ed. by J. Kestens, (Springer, Berlin
New York, 1975) pp. 455–505
20. M.A. Narbut: On the correspondence between dynamic stress states in an elastic body and in its
photoviscoelastic model, Vestn. Leningr. Univ. Ser.
Mat. Mekh. Astron. (USSR) 1, 116–122 (1978)
21. R.J. Arenz, U. Soltész: Time-dependent optical
characterization in the photoviscoelastic study of
stress-waver propagation, Exp. Mech. 21, 227–233
(1981)
22. K.S. Kim, K.L. Dickerson, W.G. Knauss (Eds): Viscoelastic effect on dynamic crack propagation in
Homalit 100. In: Workshop on Dynamic Fracture
(California Institute of Technology, Pasadena, 1983)
pp. 205–233
23. H. Weber: Ein nichtlineares Stoffgesetz für die
ebene photoviskoelastische Spannungsanalyse, Rheol.
Acta. 22, 114–122 (1983)
24. Y. Miyano, S. Nakamura, S. Sugimon, T.C. Woo:
A simplified optical method for measuring residual
stress by rapid cooling in a thermosetting resin strip,
Exp. Mech. 26, 185–192 (1986)
25. A. Bakic: Practical execution of photoviscoelastic experiments, Oesterreichische Ingenieur- und
Architekten-Zeitschrift, 131, 260–263 (1986)
26. K.S. Kim, K.L. Dickerson, W.G. Knauss: Viscoelastic behavior of opto-mechanical properties and its
application to viscoelastic fracture studies, Int. J.
Fract. 12, 265–283 (1987)
27. T. Kunio, Y. Miyano, S. Sugimori: Fundamentals
of photoviscoelastic technique for analysis of time
and temperature dependent stress and strain. In: Applied Stress Analysis, ed. by T.H. Hyde, E. Ollerton
(Elsevier Applied Sciences, London, 1990) pp. 588–
597
28. K.-H. Laermann, C.Yuhai: On the measurement of
the material response of linear photoviscoelastic
polymers, Measurement, 279–286 (1993)
91
Part A 3.6
References on Photoviscoelasticity
1. R.D. Mindlin: A mathematical theory of photoviscoelasticity, J. Appl. Phys. 29, 206–210 (1949)
2. R.S. Stein, S. Onogi, D.A. Keedy: The dynamic
birefringence of high polymers, J. Polym. Sci. 57,
801–821 (1962)
3. C.W. Ferguson: Analysis of stress-wave propagation by photoviscoelastic techniques, J. Soc. Motion
Pict. Telev. Eng. 73, 782–787 (1964)
4. P.S. Theocaris, D. Mylonas: Viscoelastic effects in
birefringent coating, J. Appl. Mech. 29, 601–607
(1962)
5. M.L. Williams, R.J. Arenz: The engineering analysis of linear photoviscoelastic materials, Exp.
Mech. 4, 249–262 (1964)
6. E.H. Dill: On phenomenological rheo-optical constitutive relations, J. Polym. Sci. Part C 5, 67–74
(1964)
7. C.L. Amba-Rao: Stress-strain-time-birefringence
relations in photoelastic plastics with creep, J.
Polym. Sci. Pt. C 5, 75–86 (1964)
8. B.E. Read: Dynamic birefringence of amorphous
polymers, J. Polym. Sci. Pt. C 5, 87–100 (1964)
9. R.D. Andrews, T.J. Hammack: Temperature dependence of orientation birefringence of polymers in
the glassy and rubbery states, J. Polym. Sci. Pt. C
5, 101–112 (1964)
10. R. Yamada, C. Hayashi, S. Onogi, M. Horio: Dynamic birefringence of several high polymers, J.
Polym. Sci. Pt. C 5, 123–127 (1964)
11. K. Sasguri, R.S. Stain: Dynamic birefringence of
polyolefins, J. Polym. Sci. Pt. C 5, 139–152 (1964)
12. D.G. Legrand, W.R. Haaf: Rheo-optical properties
of polymers, J. Polym. Sci. Pt. C 5, 153–161 (1964)
13. I.M. Daniel: Experimental methods for dynamic
stress analysis in viscoelastic materials, J. Appl.
Mech. 32, 598–606 (1965)
14. I.M. Daniel: Quasistatic properties of a photoviscoelastic material, Exp. Mech. 5, 83–89 (1965)
15. A.J. Arenz, C.W. Ferguson, M.L. Williams:
The mechanical and optical characterization of
a Solithane 113 composition, Exp. Mech. 7, 183–
188 (1967)
16. H.F. Brinson: Mechanical, optical viscoelastic characterization of Hysol 4290: Time and temperature
behavior of Hysol 4290 as obtained from creep tests
in conjunction with the time-temperature superposition principle, Exp. Mech. 8, 561–566 (1968)
3.6 Recognizing Viscoelastic Solutions if the Elastic Solution is Known
92
Part A
Solid Mechanics Topics
29. S. Yoneyama, J. Gotoh, M. Takashi: Experimental
analysis of rolling contact stresses in a viscoelastic
strip, Exp. Mech. 40, 203–210 (2000)
30. A.I. Shyu, C.T. Isayev, T.I. Li: Photoviscoelastic
behavior of amorphous polymers during transition
from the glassy to rubbery state, J. Polym. Sci. Pt. B
Polym. Phys. 39, 2252–2262 (2001)
31. Y.-H. Zhao, J. Huang: Photoviscoelastic stress analysis of a plate with a central hole, Exp. Mech. 41,
312–18 (2001)
References
3.1
3.2
Part A 3
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3.10
3.11
3.12
3.13
3.14
3.15
3.16
3.17
W.G. Knauss: The mechanics of polymer fracture,
Appl. Mech. Rev. 26, 1–17 (1973)
C. Singer, E.J. Holmgard, A.R. Hall (Eds.): A History of
Technology (Oxford University Press, New York 1954)
J.M. Kelly: Strain rate sensitivity and yield point behavior in mild steel, Int. J. Solids Struct. 3, 521–532
(1967)
H.H. Johnson, P.C. Paris: Subcritical flaw growth,
Eng. Fract. Mech. 1, 3–45 (1968)
I. Finnie: Stress analysis for creep and creeprupture. In: Appllied Mechanics Surveys, ed. by
H.N. Abramson (Spartan Macmillan, New York 1966)
pp. 373–383
F. Garofalo: Fundamentals of Creep and Creep Rupture in Metals (Macmillan, New York 1965)
N.J. Grant, A.W. Mullendore (Eds.): Deformation and
Fracture at Elevated Temperatures (MIT Press, Cambridge 1965)
F.A. McClintock, A.S. Argon (Eds.): Mechanical Behavior of Materials (Addison-Wesley, Reading 1966)
J.B. Conway: Numerical Methods for Creep and Rupture Analyses (Gordon-Breach, New York 1967)
J.B. Conway, P.N. Flagella: Creep Rupture Data
for the Refractory Metals at High Temperatures
(Gordon-Breach, New York 1971)
M. Tao: High Temperature Deformation of Vitreloy
Bulk Metallic Glasses and Their Composite. Ph.D.
Thesis (California Institute of Technology, Pasadena
2006)
J. Lu, G. Ravichandran, W.L. Johnson: Deformation behavior of the Zr41.2 Ti13.8 Cu12.5 Ni10 Be22.5 bulk
metallic glass over a wide range of strain-rates and
temperatures, Acta Mater. 51, 3429–3443 (2003)
W.G. Knauss: Viscoelasticity and the timedependent fracture of polymers. In: Comprehensive Structural Integrity, Vol. 2, ed. by I. Milne,
R.O. Ritchie, B. Karihaloo (Elsevier, Amsterdam 2003)
W. Flügge: Viscoelasticity (Springer, Berlin 1975)
H. Lu, X. Zhang, W.G. Knauss: Uniaxial, shear and
Poisson relaxation and their conversion to bulk relaxation, Polym. Eng. Sci. 37, 1053–1064 (1997)
N.W. Tschoegl, W.G. Knauss, I. Emri: Poisson’s ratio in linear viscoelasticity, a critical review, Mech.
Time-Depend. Mater. 6, 3–51 (2002)
I.L. Hopkins, R.W. Hamming: On creep and relaxation, J. Appl. Phys. 28, 906–909 (1957)
3.18
3.19
3.20
3.21
3.22
3.23
3.24
3.25
3.26
3.27
3.28
3.29
3.30
R.A. Schapery: Approximate methods of transform
inversion for viscoelastic stress analysis, Proc. 4th
US Natl. Congr. Appl. Mech. (1962) pp. 1075–1085
J.F. Clauser, W.G. Knauss: On the numerical determination of relaxation and retardation spectra for
linearly viscoelastic materials, Trans. Soc. Rheol. 12,
143–153 (1968)
G.W. Hedstrom, L. Thigpen, B.P. Bonner, P.H. Worley: Regularization and inverse problems in viscoelasticity, J. Appl. Mech. 51, 121–12 (1984)
I. Emri, N.W. Tschoegl: Generating line spectra from
experimental responses. Part I: Relaxation modulus and creep compliance, Rheol. Acta. 32, 311–321
(1993)
I. Emri, N.W. Tschoegl: Generating line spectra from
experimental responses. Part IV: Application to experimental data, Rheol. Acta. 33, 60–70 (1994)
I. Emri, N.W. Tschoegl: An iterative computer algorithm for generating line spectra from linear
viscoelastic response functions, Int. J. Polym. Mater.
40, 55–79 (1998)
N.W. Tschoegl, I. Emri: Generating line spectra from
experimental responses. Part II. Storage and loss
functions, Rheol. Acta. 32, 322–327 (1993)
N.W. Tschoegl, I. Emri: Generating line spectra from
experimental responses. Part III. Interconversion
between relaxation and retardation behavior, Int.
J. Polym. Mater. 18, 117–127 (1992)
I. Emri, N.W. Tschoegl: Generating line spectra from
experimental responses. Part V. Time-dependent
viscosity, Rheol. Acta. 36, 303–306 (1997)
I. Emri, B.S. von Bernstorff, R. Cvelbar, A. Nikonov:
Re-examination of the approximate methods for
interconversion between frequency- and timedependent material functions, J. Non-Newton. Fluid
Mech. 129, 75–84 (2005)
A. Nikonov, A.R. Davies, I. Emri: The determination of creep and relaxation functions from a single
experiment, J. Rheol. 49, 1193–1211 (2005)
M.A. Branch, T.F. Coleman, Y. Li: A subspace interior, and conjugate gradient method for large-scale
bound-constrained minimization problems, Siam J.
Sci. Comput. 21, 1–23 (1999)
F. Kohlrausch: Experimental-Untersuchungen über
die elastische Nachwirkung bei der Torsion, Ausdehnung und Biegung, Pogg. Ann. Phys. 8, 337 (1876)
Mechanics of Polymers: Viscoelasticity
3.31
3.32
3.33
3.34
3.35
3.37
3.38
3.39
3.40
3.41
3.42
3.43
3.44
3.45
3.46
3.47
3.48
3.49
3.50
3.51
3.52
3.53
3.54
3.55
3.56
3.57
3.58
3.59
3.60
3.61
3.62
J. Bischoff, E. Catsiff, A.V. Tobolsky: Elastoviscous
properties of amorphous polymers in the transition
region 1, J. Am. Chem. Soc. 74, 3378–3381 (1952)
F. Schwarzl, A.J. Staverman: Time-temperature dependence of linearly viscoelastic behavior, J. Appl.
Phys. 23, 838–843 (1952)
M.L. Williams, R.F. Landel, J.D. Ferry: Mechanical properties of substances of high molecular
weight. 19. The temperature dependence of relaxation mechanisms in amorphous polymers and
other glass-forming liquids, J. Am. Chem. Soc. 77,
3701–3707 (1955)
D.J. Plazek: Temperature dependence of the viscoelastic behavior of polystyrene, J. Phys. Chem. US
69, 3480–3487 (1965)
D.J. Plazek: The temperature dependence of the viscoelastic behavior of poly(vinyl acetate), Polym. J. 12,
43–53 (1980)
R.A. Fava (Ed.): Methods of experimental physics
16C. In: Viscoelastic and Steady-State Rheological
Response, ed. by D.J. Plazek (Academic, New York
1979)
L.W. Morland, E.H. Lee: Stress analysis for linear
viscoelastic materials with temperature variation,
Trans. Soc. Rheol. 4, 233–263 (1960)
L.J. Heymans: An Engineering Analysis of Polymer
Film Adhesion to Rigid Substrates. Ph.D. Thesis (California Institute of Technology, Pasadena 1983)
G.U. Losi, W.G. Knauss: Free volume theory and nonlinear viscoelasticity, Polym. Eng. Sci. 32, 542–557
(1992)
I. Emri, T. Prodan: A Measuring system for bulk
and shear characterization of polymers, Exp. Mech.
46(6), 429–439 (2006)
N.W. Tschoegl, W.G. Knauss, I. Emri: The effect of
temperature and pressure on the mechanical properties of thermo- and/or piezorheologically simple
polymeric materials in thermodynamic equilibrium
– a critical review, Mech. Time-Depend. Mater. 6,
53–99 (2002)
R.W. Fillers, N.W. Tschoegl: The effect of pressure on
the mechanical properties of polymers, Trans. Soc.
Rheol. 21, 51–100 (1977)
W.K. Moonan, N.W. Tschoegl: The effect of pressure on the mechanical properties of polymers.
2. Expansively and compressibility measurements,
Macromolecules 16, 55–59 (1983)
W.K. Moonan, N.W. Tschoegl: The effect of pressure on the mechanical properties of polymers. 3.
Substitution of the glassy parameters for those of
the occupied volume, Int. Polym. Mater. 10, 199–211
(1984)
W.K. Moonan, N.W. Tschoegl: The effect of pressure
on the mechanical properties of polymers. 4. Measurements in torsion, J. Polym. Sci. Polym. Phys. 23,
623–651 (1985)
93
Part A 3
3.36
G. Williams, D.C. Watts: Non-symmetrical dielectric behavior arising from a simple empirical decay
function, Trans. Faraday Soc. 66, 80–85 (1970)
S. Lee, W.G. Knauss: A note on the determination of
relaxation and creep data from ramp tests, Mech.
Time-Depend. Mater. 4, 1–7 (2000)
A. Flory, G.B. McKenna: Finite step rate corrections
in stress relaxation experiments: A comparison of
two methods, Mech. Time-Depend. Mater. 8, 17–37
(2004)
J.F. Tormey, S.C. Britton: Effect of cyclic loading on
solid propellant grain structures, AIAA J. 1, 1763–1770
(1963)
R.A. Schapery: Thermomechanical behavior of viscoelastic media with variable properties subjected
to cyclic loading, J. Appl. Mech. 32, 611–619 (1965)
L.R.G. Treloar: Physics of high-molecular materials,
Nature 181, 1633–1634 (1958)
M.-F. Vallat, D.J. Plazek, B. Bushan: Effects of thermal treatment of biaxially oriented poly(ethylene
terephthalate), J. Polym. Sci. Polym. Phys. 24, 1303–
1320 (1986)
L.E. Struik: Physical Aging in Amorphous Polymers
and Other Materials (Elsevier Scientific, Amsterdam
1978)
G.B. McKenna, A.J. Kovacs: Physical aging of
poly(methyl methacrylate) in the nonlinear range
– torque and normal force measurements, Polym.
Eng. Sci. 24, 1138–1141 (1984)
A. Lee, G.B. McKenna: Effect of crosslink density on
physical aging of epoxy networks, Polymer 29, 1812–
1817 (1988)
C. G’Sell, G.B. McKenna: Influence of physical
aging on the yield response of model dgeba
poly(propylene oxide) epoxy glasses, Polymer 33,
2103–2113 (1992)
M.L. Cerrada, G.B. McKenna: Isothermal, isochronal
and isostructural results, Macromolecules 33, 3065–
3076 (2000)
L.C. Brinson, T.S. Gates: Effects of physical aging
on long-term creep of polymers and polymer matrix composites, Int. J. Solids Struct. 32, 827–846
(1995)
L.M. Nicholson, K.S. Whitley, T.S. Gates: The combined influence of molecular weight and temperature on the physical aging and creep compliance
of a glassy thermoplastic polyimide, Mech. TimeDepend. Mat. 5, 199–227 (2001)
J.D. Ferry: Viscoelastic Properties of Polymers, 3rd
edn. (Wiley, New York 1980)
J.R. Mcloughlin, A.V. Tobolsky: The viscoelastic behavior of polymethyl methacrylate, J. Colloid Sci. 7,
555–568 (1952)
H. Leaderman, R.G. Smith, R.W. Jones: Rheology of
polyisobutylene. 2. Low molecular weight polymers,
J. Polym. Sci. 14, 47–80 (1954)
References
94
Part A
Solid Mechanics Topics
3.63
3.64
3.65
3.66
3.67
Part A 3
3.68
3.69
3.70
3.71
3.72
3.73
3.74
3.75
3.76
3.77
3.78
3.79
W.G. Knauss, V.H. Kenner: On the hygrothermomechanical characterization of polyvinyl acetate, J.
Appl. Phys. 51, 5131–5136 (1980)
I. Emri, V. Pavšek: On the influence of moisture
on the mechanical properties of polymers, Mater.
Forum 16, 123–131 (1992)
D.J. Plazek: Magnetic bearing torsional creep apparatus, J. Polym. Sci. Polym. Chem. 6, 621–633
(1968)
D.J. Plazek, M.N. Vrancken, J.W. Berge: A torsion
pendulum for dynamic and creep measurements
of soft viscoelastic materials, Trans. Soc. Rheol. 2,
39–51 (1958)
G.C. Berry, J.O. Park, D.W. Meitz, M.H. Birnboim,
D.J. Plazek: A rotational rheometer for rheological
studies with prescribed strain or stress history, J.
Polym. Sci. Polym. Phys. Ed. 27, 273–296 (1989)
R.S. Duran, G.B. McKenna: A torsional dilatometer for volume change measurements on deformed
glasses: Instrument description and measurements
on equilibrated glasses, J. Rheol. 34, 813–839 (1990)
J.E. McKinney, S. Edelman, R.S. Marvin: Apparatus
for the direct determination of the dynamic bulk
modulus, J. Appl. Phys. 27, 425–430 (1956)
J.E. McKinney, H.V. Belcher: Dynamic compressibility
of poly(vinyl acetate) and its relation to free volume,
J. Res. Nat. Bur. Stand. Phys. Chem. 67A, 43–53 (1963)
T.H. Deng, W.G. Knauss: The temperature and frequency dependence of the bulk compliance of
Poly(vinyl acetate). A re-examination, Mech. TimeDepend. Mater. 1, 33–49 (1997)
S. Sane, W.G. Knauss: The time-dependent bulk
response of poly (methyl methacrylate), Mech. TimeDepend. Mater. 5, 293–324 (2001)
Z. Ma, K. Ravi-Chandar: Confined compression–
a stable homogeneous deformation for multiaxial
constitutive characterization, Exp. Mech. 40, 38–45
(2000)
K. Ravi-Chandar, Z. Ma: Inelastic deformation
in polymers under multiaxial compression, Mech.
Time-Depend. Mater. 4, 333–357 (2000)
D. Qvale, K. Ravi-Chandar: Viscoelastic characterization of polymers under multiaxial compression,
Mech. Time-Depend. Mater. 8, 193–214 (2004)
S.J. Park, K.M. Liechti, S. Roy: Simplified bulk experiments and hygrothermal nonlinear viscoelasticty,
Mech. Time-Depend. Mater. 8, 303–344 (2004)
A. Kralj, T. Prodan, I. Emri: An apparatus for
measuring the effect of pressure on the timedependent properties of polymers, J. Rheol. 45,
929–943 (2001)
J.B. Pethica, R. Hutchings, W.C. Oliver: Hardness
measurement at penetration depths as small as
20 nm, Philos. Mag. 48, 593–606 (1983)
W.C. Oliver, R. Hutchings, J.B. Pethica: Measurement of hardness at indentation depths as low as
20 nanometers. In: Microindentation Techniques in
Materials Science and Engineering ASTM STP 889, ed.
3.80
3.81
3.82
3.83
3.84
3.85
3.86
3.87
3.88
3.89
3.90
3.91
3.92
3.93
3.94
3.95
by P.J. Blau, B.R. Lawn (American Society for Testing
and Materials, Philadelphia 1986) pp. 90–108
W.C. Oliver, G.M. Pharr: An improved technique for
determining hardness and elastic modulus using
load and displacement sensing indentation experiments, J. Mater. Res. 7, 1564–1583 (1992)
I.N. Sneddon: The relation between load and penetration in the axisymmetric boussinesq problem for
a punch of arbitrary profile, Int. J. Eng. Sci. 3, 47–57
(1965)
M. Oyen-Tiesma, Y.A. Toivola, R.F. Cook: Loaddisplacement behavior during sharp indentation of
viscous-elastic-plastic materials. In: Fundamentals
of Nanoindentation and Nanotribology II, ed. by
S.P. Baker, R.F. Cook, S.G. Corcoran, N.R. Moody
(Mater. Res. Soc., Warrendale 2000) pp. Q1.5.1–
Q1.5.6, MRS Proc. Vol. 649, MRS Fall Meeting, Boston
L. Cheng, X. Xia, W. Yu, L.E. Scriven, W.W. Gerberich:
Flat-punch indentation of viscoelastic material, J.
Polym. Sci. Polym. Phys. 38, 10–22 (2000)
H. Lu, B. Wang, J. Ma, G. Huang, H. Viswanathan:
Measurement of creep compliance of solid polymers
by nanoindentation, Mech. Time-Depend. Mater. 7,
189–207 (2003)
G. Huang, B. Wang, H. Lu: Measurements of viscoelastic functions in frequency-domain by nanoindentation, Mech. Time-Depend. Mater. 8, 345–364
(2004)
T.C.T. Ting: The contact stresses between a rigid indenter and a viscoelastic half-space, J. Appl. Mech.
33, 845–854 (1966)
E.H. Lee, J.R.M. Radok: The contact problem for viscoelastic bodies, J. Appl. Mech. 27, 438–444 (1960)
E. Riande, R. Diaz-Calleja, M.G. Prolongo, R.M. Masegosa, C. Salom: Polymer Viscoelasticity-Stress and
Strain in Practice (Dekker, New York 2000)
J.R.M. Radok: Visco-elastic stress analysis, Q. of
Appl. Math. 15, 198–202 (1957)
S.C. Hunter: The Hertz problem for a rigid spherical indenter and a viscoelastic half-space, J. Mech.
Phys. Solids 8, 219–234 (1960)
W.H. Yang: The contact problem for viscoelastic bodies, J. Appl. Mech. 33, 395–401 (1960)
S.A. Hutcheson, G.B. McKenna: Nanosphere embedding into polymer surfaces: A viscoelastic contact
mechanics analysis, Phys. Rev. Lett. 94, 076103.1–
076103.4 (2005)
J.H. Teichroeb, J.A. Forrest: Direct imaging of
nanoparticle embedding to probe viscoelasticity of
polymer surfaces, Phys. Rev. Lett. 91, 016104.1–
106104.4 (2003)
M.L. Oyen: Spherical indentation creep following
ramp loading, J. Mater. Res. 20, 2094–2100 (2005)
M.R. VanLandingham, N.K. Chang, P.L. Drzal,
C.C. White, S.-H. Chang: Viscoelastic characterization of polymers using instrumented indentation–1.
Quasi-static testing, J. Polym. Sci. Polym. Phys. 43,
1794–1811 (2005)
Mechanics of Polymers: Viscoelasticity
3.96
3.97
3.98
3.100
3.101
3.102
3.103
3.104
3.105
3.106
3.107
3.108
3.109
3.110
3.111 R.A. Schapery: A theory of non-linear thermoviscoelasticity based on irreversible thermodynamics,
Proc. 5th Natl. Cong. Appl. Mech. (1966) pp. 511–530
3.112 R.A. Schapery: On the characterization of nonlinear
viscoelastic materials, Polym. Eng. Sci. 9, 295–310
(1969)
3.113 H. Lu, W.G. Knauss: The role of dilatation in the
nonlinearly viscoelastic behavior of pmma under
multiaxial stress states, Mech. Time-Depend. Mater.
2, 307–334 (1999)
3.114 H. Lu, G. Vendroux, W.G. Knauss: Surface deformation measurements of cylindrical specimens by
digital image correlation, Exp. Mech. 37, 433–439
(1997)
3.115 W.H. Peters, W.F. Ranson: Digital imaging techniques in experimental stress analysis, Opt. Eng. 21,
427–432 (1982)
3.116 M.A. Sutton, W.J. Wolters, W.H. Peters, W.F. Ranson,
S.R. McNeil: Determination of displacements using
an improved digital image correlation method, Im.
Vis. Comput. 1, 133–139 (1983)
3.117 H. Lu: Nonlinear Thermo-Mechanical Behavior of
Polymers under Multiaxial Loading. Ph.D. Thesis
(California Institute of Technology, Pasadena 1997)
3.118 D.R. Lide: CRC Handbook of Chemistry and Physics
(CRC Press, Boca Raton 1995)
3.119 G.B. McKenna: On the physics required for prediction of long term performance of polymers and their
composites, J. Res. NIST 99(2), 169–189 (1994)
3.120 P.A. O’Connell, G.B. McKenna: Large deformation response of polycarbonate: Time-temperature,
time-aging time, and time-strain superposition,
Polym. Eng. Sci. 37, 1485–1495 (1997)
3.121 J.L. Sullivan, E.J. Blais, D. Houston: Physical aging in the creep-behavior of thermosetting and
thermoplastic composites, Compos. Sci. Technol. 47,
389–403 (1993)
3.122 I.M. Hodge: Physical aging in polymer glasses, Science 267, 1945–1947 (1995)
3.123 N. Goldenberg, M. Arcan, E. Nicolau: On the most
suitable specimen shape for testing sheer strength
of plastics, ASTM STP 247, 115–121 (1958)
3.124 M. Arcan, Z. Hashin, A. Voloshin: A method to produce uniform plane-stress states with applications
to fiber-reinforced materials, Exp. Mech. 18, 141–146
(1978)
3.125 M. Arcan: Discussion of the iosipescu shear test as
applied to composite materials, Exp. Mech. 24, 66–
67 (1984)
3.126 W.G. Knauss, W. Zhu: Nonlinearly viscoelastic behavior of polycarbonate. I. Response under pure
shear, Mech. Time-Depend. Mater. 6, 231–269 (2002)
3.127 W.G. Knauss, W. Zhu: Nonlinearly viscoelastic behavior of polycarbonate. II. The role of volumetric
strain, Mech. Time-Depend. Mater. 6, 301–322 (2002)
95
Part A 3
3.99
J.L. Loubet, B.N. Lucas, W.C. Oliver: Some measurements of viscoelastic properties with the help
of nanoindentation, International workshop on Instrumental Indentation, ed. by D.T. Smith (NIST
Special Publication, San Diego 1995) pp. 31–34
B.N. Lucas, W.C. Oliver, J.E. Swindeman: The dynamic of frequency-specific, depth-sensing indentation testing, Fundamentals of Nanoindentation
and Nanotribology, Vol. 522, ed. by N.R. Moody
(Mater. Res. Soc., Warrendale 1998) pp. 3–14, MRS
Meeting, San Francisco 1998
R.J. Arenz, M.L. Williams (Eds.): A photoelastic technique for ground shock investigation. In: Ballistic
and Space Technology (Academic, New York 1960)
Y. Miyano, T. Tamura, T. Kunio: The mechanical and
optical characterization of Polyurethane with application to photoviscoelastic analysis, Bull. JSME 12,
26–31 (1969)
A.B.J. Clark, R.J. Sanford: A comparison of static and
dynamic properties of photoelastic materialsm, Exp.
Mech. 3, 148–151 (1963)
O.A. Hasan, M.C. Boyce: A constitutive model for
the nonlinear viscoelastic-viscoplastic behavior of
glassy polymers, Polym. Eng. Sci. 35, 331–334 (1995)
J.S. Bergström, M.C. Boyce: Constitutive modeling of
the large strain time-dependent behavior of elastomers, J. Mech. Phys. Solids 46, 931–954 (1998)
P.D. Ewing, S. Turner, J.G. Williams: Combined
tension-torsion studies on polymers: apparatus and
preliminary results for Polyethylene, J. Strain Anal.
Eng. 7, 9–22 (1972)
C. Bauwens-Crowet: The compression yield behavior
of polymethal methacrylate over a wide range of
temperatures and strain rates, J. Mater. Sci. 8, 968–
979 (1973)
L.C. Caraprllucci, A.F. Yee: The biaxial deformation
and yield behavior of bisphenol-A polycarbonate:
Effect of anisotropy, Polym. Eng. Sci. 26, 920–930
(1986)
W.G. Knauss, I. Emri: Non-linear viscoelasticity
based on free volume consideration, Comput. Struct.
13, 123–128 (1981)
W.G. Knauss, I. Emri: Volume change and the nonlinearly thermo-viscoelastic constitution of polymers, Polym. Eng. Sci. 27, 86–100 (1987)
G.U. Losi, W.G. Knauss: Free volume theory and
nonlinear thermoviscoelasticity, Polym. Eng. Sci. 32,
542–557 (1992)
G.U. Losi, W.G. Knauss: Thermal stresses in nonlinearly viscoelastic solids, J. Appl. Mech. 59, S43–S49
(1992)
W.G. Knauss, S. Sundaram: Pressure-sensitive dissipation in elastomers and its implications for the
detonation of plastic explosives, J. Appl. Phys. 96,
7254–7266 (2004)
References