3.9.2 The Triangular Field 3.9.2.1 Foreword As noted earlier, one
advertisement

3.9.2 The Triangular Field
3.9.2.1 Foreword
As noted earlier, one assumes the existence of surfaces of velocity discontinuity as an acceptable
feature of the kinematically admissible field. When these surfaces are farther apart, one from the
other, as in Figure <61a>, one may consider the spherical velocity field (or the trapezoidal one)
as a good approximation of the actual field. With varying conditions the two surfaces might get
closer to each other as in Figure <61b> and one may consider other representation more
appropriate, as for example, the triangular velocity field.
Historically the triangular field served Green (Ref. [65]) to handle the process of plane strain
drawing and extrusion. Kudo (Ref. [66]) suggested and Kobayashi (Ref. [67]) executed a
solution with a triangular field for axisymmetric flow, with zero friction and fixed triangular
configuration. In Ref. [68], friction was treated as a variable and the shape of the triangular field
as a pseudoindependent parameter, subject to power minimization.
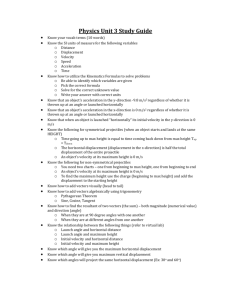
In the triangular velocity field, the surfaces of velocity discontinuity Γ1 and Γ2 are conical
surfaces that meet at the axis of symmetry (see Figure <62>). The position of their intersection
point along the axis of symmetry is temporarily assumed arbitrary. Thus the distance l2 is called
a pseudoindependent parameter. When the total power of deformation is computed, it will be
minimized with respect to l2. Zones I and III are rigid bodies moving at axial velocities of v0 and
vf, respectively. Drastic changes in direction occur at the surfaces Γ1 and Γ2 so that in zone II the
motion is parallels to the surface of the die. Only in zone II does plastic deformation occur.
Fig. 61
Triangular vs. spherical field.
Strain rates and internal power are computed for zone II. Then shear losses over the surfaces Γ1
and Γ2 are computed and friction losses are determined. The derivations from the triangular field
are done in Ref. [68].
The solution which is presented in Sec. {9.2.2} can be represented symbolically in the form of
σ xf σ xb
−
= f (r %, α , m, and R d )
σ 0
σ 0
Eq. (22)
Note that inertia forces are ignored (but can easily be included) in Eq. (22).
The net drawing stress [(σxf-σxb)/σo] is an explicit function of reduction (r%), semicone angle
of the die (α), friction (m), and the semi-independent shape of the triangle represented by Rd.
The value of R that minimizes the net drawing stress of Eq. (22) is determined in the original
work (Ref. [68]) as outlined in Sec. {9.2.2}.
For some range of combination of die angle and reduction, the triangular field of Figure <62>
presented by a "uni-triangular region of plastic deformation" (Zone II), determine a lower upperbound solution for the required net drawing/extrusion stress. For smaller and smaller die angles,
a field with increasing number of triangles, a multi-triangular velocity field as shown in the
Figure <63>, will provide a lower upper-bound solution as provided in Sec. {9.2.3}. The
triangular velocity field and its use in obtaining an upper-bound solution for power and a measure
of distortion are provided next.
Fig. 62
The uni-triangular velocity field.
3.9.2.2 Uni-Triangular Field
3.9.2.2.1
Net Drawing/Extrusion Stress
Fig. 63
The multi-triangular velocity field.
The net drawing stress as computed in Ref. [68] for the triangular field is given by:
σ xf σ xb
cot α
−
=
σ 0 T
3
σ 0
R
Fα 0
R d
Rf
− Fα
R
d
sin α
1
+
3 sin β 1 sin (β 1 + α )
2m R0 R f
1
cot α + L
−
+
+
sin β 2 sin (β 2 − α )
R f
3 R d R d
Eq. (23)
Where
1− Z
Fα (Z ) = 4 tan 2 α + (1 − Z )2 − 2 tan α + arcsh
2 tan α
4 tan 2 α + 1 − Z
+ 4 tan 2 α + 1 arcsh(2 tan α ) − arcsh
2 Z tan α
and the value of Rd is found by successive approximation as follows:
Rd
R
0
(0 )
=
Rf
Rb
cos α 1 + 2m
(
1 + (R f
)
/ R0 )
1 − R f / R0
Eq. (a)
as the zero order of precision for Rd.
Successive orders of approximation Rd(k), k=1,2,..., are calculated from Rd(k-1), given that
Rd
R
0
(k )
R
= d
R0
(k −1)
φ
−
φ′
(k −1)
Eq. (b)
where φ is a function of Rd/Ro given as:
R
φ d
R0
R0
=
R
d
R f R d
R f
−
1 +
+ 2m1 −
R0 R0
R0
R
1 + 0 sec 2 α
R
f
2
Rf
R
+ 4 tan 2 α + 1 − 0 − 4 tan 2 α + 1 −
Rd
Rd
2
Eq. (c)
and φ' = dφ/d(Rd/Ro) follows symbolically by differentiation:
R
φ ′ d
R0
R
= − 0
R
d
+
R0
R
d
2
Rf
R f
R
− 1 + 0 sec 2 α
+ 2m1 −
1 +
R0 R f
R0
2
R0
1 −
R
d
R
4 tan 2 α + 1 − 0
Rd
2
R f R0
1 −
R R
d d
−
2
Rf
R
d
Rf
4 tan 2 α + 1 −
Rd
Eq. (d)
2
The ratio (φ/φ') is calculated for (Rd/Ro)(k-1). Also, from geometry, (Eqs. (12) to (15) of Ref. [68])
sin (β 1 ) =
1
(
1 + l1 / R f
Eq. (e)
)2
where
R
l1
= − cot α + 2 d
Rf
Rf
cos ec(2α )
Eq. (f)
if l2>0 then
1
sin (β 2 ) =
1 + (l / R )2
2
0
if l2<0, then
Eq. (g)
β 2 = π − arcsin
1
1 + (l 2 / R 0 )2
and
R
l2
= cot α − 2 d
R0
R0
cos ec(2α )
Eq. (h)
The net drawing extrusion stress by Eq. (11) is linearly dependent on the term ln(Ro/Rf), as stated
by Eq. (d) of Sec. {3.4}. Because of the integration procedure followed in Ref. [68], this relation
is not explicitly expressed by Eq. (11). The upper-bound solution by the triangular filed is a little
bulkier than that by the spherical field and iteration procedure for the determination of the
parameter Rd is involved. The interpretation of the solution by the triangular field is given in Sec.
{8.2.5} while the derivation is performed in the Appendix of Ref. [68].
As already noted, the spherical field lacks the flexibility provided by the incorporation of a
pseudoindependent parameter. As a result of this shortcoming, the effect of friction on the
distortion is missing from Sec. {3.5} entitled, 'Distorted Grid Pattern By the Spherical Field'.
For a more complete description, the triangular field is studied in Ref. [68]. In the abstract of
Ref. [69], one reads as follows:
"The effects of friction upon the intermediate and final distorted grids for wire drawing
and/or extrusion were analytically studied for an assumed triangular velocity field. An
upper-bound solution for the process was used. This solution predicted that the shape of
the final and intermediate distorted grids were functions of the process geometry and of
friction. Initially, combinations of reduction and semicone angle (α) were found for
which the triangular velocity field was energetically preferred over an existing spherical
velocity field. The analytical final distorted grids were then compared to experimentally
obtained final distorted grids to determine the experimental friction. This was done by
plotting calibration curves for distortion where friction served as the parameter and by
comparing the actual distortion with the family of calibration curves."
For the spherical velocity field model, the configuration of the three zones is established by the
semicone angle, α, and the reduction only and therefore, the corresponding final and intermediate
distorted grids do not vary with changes in friction. However, the triangular velocity model (see
Fig. <64>), assuming sound flow, is dependent upon the semicone angle, the reduction, and the
friction.
Fig. 64
3.9.2.2.2
Intermediate grid deformation pattern.
Components of the Velocity
When an upper-bound solution is used for the process, it is assumed that the associated velocities
of each of the three zones of the triangular model are as follows:
Zone I
In zone I the velocity is vo. The incoming material is moving as a rigid body in the axial
direction.
Zone II
The flow lines are parallel to the surface of the die forming a semicone angle, α, with the axis of
symmetry, so that the vertical (radial) component, U , by Eqs. (3) to (5) of Ref. [69] is
II
Z − l2
U II = −k II v 0 1 +
R
tan α tan α
Eq. (i)
and the horizontal (axial component), vII, is
Z − l2
v II = k II v 0 1 +
R
tan α
Eq. (j)
where
k II =
R02
(R0 − l 2 tan α )2
Eq. (k)
and Z and R are axial and radial components of distance, respectively, in a cylindrical coordinate
system.
Zone III
In zone III the velocity is Vf. The outgoing product is moving as a rigid body in the axial
direction. For sound flow relation, (11) prevails:
R
= 0
v 0 R f
vf
3.9.2.2.3
2
Eq. (11)
Determination of the Final Distortion Grid
By studying the flow patterns through conical dies, valuable information can be obtained
concerning the degree of deformation undergone by the material. A useful tool for the study of
flow is the billet split longitudinally into halves. Grid lines are etched or mechanically inscribed
on one half of the billet. The two halves are fitted together and are passed through a die as a
single billet. The flow can be observed by disassembling the two halves and exposing the
deformed grid lines (see Sec {3.2} and Ref. [61]).
The shape of the distorted grid can also be predicted analytically. Once a valid velocity field
is assumed, equations can be derived to describe the relative distortion in a billet. The triangular
field is applicable for this use because of its dependence upon friction.
Equations (a) and (b) define the velocity field for the triangular model. Analytically, it is
possible to predict the relative position after deformation of a point initially on an imaginary
straight line perpendicular to the axis of symmetry of the billet. Any point moving in a straight
line parallel to the axis of symmetry in zone I will continue its straight line movement in zone III
at a radial distance, R, obeying, by Eq. (b) of Sec. {3.4}
R
R
= i
Rf
R0
Eq. (24)
No matter what velocity field is assumed for a sound flow, spherical, triangular or any other, Eq.
(23) is dictated by the law of incompressibility. For steady state flow, portions of a line at a
radial distance, Ri, initially, travel differently when they reach the interface between zones I and
II. They assume a direction dictated by the velocity field and geometry of zone II. For the present
triangular field, the flow lines are parallel to the surface of the die forming an angle, α, with the
axis of symmetry.
The shape of the final distorted grid is given in Ref. [69] in a dimensionless form. In a
simplified form, the shape of the final distorted grid is given symbolically in Ref. [81] as follows:
Z ′f
Rf
R
= I
R0
R
cot α 0
R f
2
− 1 ⋅ 3 ⋅ R d sec 2 α − R0
2 Rf
R f
3
− 1
Eq. (25)
Examples of expected shapes of the triangle and of the intermediate and final distorted grid
patterns are shown in Figure <64>. Figures <64a> and <64b> represent combinations of
semicone angle and reductions of 20° and 50%, and 35° and 50% respectively. Each figure
contains two intermediate and final distorted grids, one depicted a friction value of zero (the
dashed grid lines) and the other unity (the solid grid lines).
3.9.2.3 Multi-Triangular Field
3.9.2.3.1
The Multi-Triangular Velocity Field
In the multi-triangular velocity field, the plastic deformation region is divided into 'n' triangles
(see Fig. <63>) and the reductions of each individual triangle are identical. The concepts of
velocity discontinuity Γi1 and Γi2 (i=1,2,...,n) are pairs of conical surfaces that meet (in pairs) on
the axis of symmetry. The positions of their intersection points places on the line of symmetry is
denoted as li (i=1,2,...,n), treated as a pseudoindependent parameter. When the total power of
deformation is computed, it will be minimized with respect to li. (Refs. [81]..[83]) When the
particles move in the triangles which are supported on the side by the surface of the die (zones
IIi), they move in a direction parallel to the die surface. When the particles enter into the other
triangles which touch the die with one corner while the side opposite to that corner coincides with
the line of symmetry, then they move as rigid bodies in the direction of the axis of symmetry.
Only in zones IIi does plastic deformation occur.
Because each of the n triangles is undergoing identical reduction, the diametral ratio for each
triangle is given by the following Eq. (27).
The upper-bound solution for the multi-triangular velocity field for flow through conical
converging dies can be based on Eq. (11), and presented symbolically as follows:
σ xf σ xb
*
−
=J =
σ
σ
0
0
∑
cot α
i =1
3
n
1
λ sin α
Fα − Fα +
3
ξ
ξ
1
(β 1 + α )
β
sin
sin
1
2m
1
(1 − λ ) 1 cot α + 2m L
+
+
ξ
sin β 2 sin (β 2 − α )
3
3 R1
Eq. (26)
Since the values of the expression in the braces {} in Eq. (25a) for each of the individual triangles
are identical, i.e. identical values of power lost for each triangle, Eq. (25a) can be expressed
symbolically as follows:
cot α
J * = n
3
where
1
λ sin α
Fα − Fα +
3
ξ
ξ
1
(β 1 + α )
β
sin
sin
1
2m
1
(1 − λ ) 1 cot α + 2m L
+
+
ξ
sin β 2 sin (β 2 − α )
3 R1
3
1− X
Fα (X ) = 4 tan 2 α + (1 − X )2 − 2 tan α + arcsh
2 tan α
4 tan 2 α + 1 − X
+ 4 tan 2 α + 1 arcsh(2 tan α ) − arcsh
2 X tan α
Rf
R
λ = i =
Ri −1 R0
ξ=
1/ n
Rd i
Ri −1
where
when li > 0
1
β 1 = arcsin
1
γ
1 + − 1 cot α −
λ
λ
β 2 = arcsin
1
1+ γ 2
γ = cot α − 2ξ cos ec(2α ) =
and when li < 0
2
li
Ri − 1
Eq. (27)
β 2 = π − arcsin
1
1+ γ 2
The value of Rdi is found by successive approximation, shown symbolically, as follows:
Rd i
Ri −1
(0 )
1− λ
= λ cos α 1 + 2m
1+ λ
Eq. (a)
as the zero order of precision.
Successive orders of approximations ( R d i )(k), k=1,2,...., are calculated from ( R d i )(k-1):
Rd i
R
i −1
(k −1)
Rd
= i
Ri −1
(k −1)
φ
−
φ′
(k −1)
Eq. (b)
where φ is a function of R d i /RI-1
R R
R
1
φ d i = i −1 [1 + λ + 2m(1 − λ )] − d i 1 + sec 2 α
Ri −1 Rd i
Ri −1 λ
2
R
R
+ 4 tan 2 α + 1 − i −1 − 4 tan 2 α + 1 − i −1 ⋅ λ
Rd i
Rd i
2
Eq. (c)
and
dφ
φ′ =
d (R / R )
di
i −1
Eq. (d)
by differentiation
2
R
Rd
1
φ ′ i = − i −1 [1 + λ + 2m(1 − λ )]− 1 + sec 2 α
λ
Ri −1
Rd i
+
Ri −1
R
di
2
2
Ri −1
1 −
R
d
i
R
4 tan 2 α + 1 − i −1
R d i
2
−
Ri −1 Ri −1
1 −
⋅λ
R
R
d
d
i
i
R
4 tan 2 α + 1 − i −1 λ
R d i
Eq. (e)
2
Note that the total power J* is a function of reduction ratio Ro/Rf, semi-cone angle of the die α,
friction factor m, and the relative length of the bearing L/Rf. It is also a function of the number of
triangles into which the deformation zone is divided, namely,
R
L
J * = J * 0 , α , m,
, and
Rf
R
f
n
Eq. (29)
The number of triangles, n, is the pseudoindependent parameter, chosen as that which minimizes
the total power. Here, only integer number of regions were considered.
In Figure <65>, the solid lines show the result of Eq. (25) for a specific reduction and friction.
It is obvious that the smaller the die angle becomes the higher will be the number of regions n
which will minimize the result.
For any integer value of n from 1 and up, the characteristics of Eq. (25), as plotted in Fig.
<65>, show high values of net drawing/extrusion stress for small and large die angles with a
specific optimal die angle at which the respective curve exhibits a minima. Since any value of n
is "kinematically admissible," it follows that for each specific value of α, the number of triangles
n will be chosen as that which minimizes the function J*. Thus, for decreasing die angles, a
larger number of triangles will provide a lower (better) upper-bound solution. A continuous line
with slope discontinuities at the points of intersection between the solutions for n = j and for n = j
+ 1 will provide a lower upper-bound solution.
Fig. 65
3.9.2.3.2
Solutions of uni-and multi-triangular velocity fields and their envelope.
Determination of the Final Distorted Grid
In the multi-triangular velocity field, each triangle is handled independently of the others. Every
triangle has the same semi-cone angle of the die α, reduction Ri-1/Ri, and friction m as the others.
Each triangle would cause the identical relative final displacement Zfi/Ri as given by Eq. (24) for
a uni-triangular field. The ith displacement would be added to the individual displacement of the
i+1 element for the total displacement of the i+1 elements. Therefore, the solution of the final
distortion for the multi-triangular velocity field (n is an integral number) can be obtained by using
the following procedure:
Z ′f
R
= i
R f R0
n −1
Z
Z f 1 1
2 + f 2
R
R1 λ
2
Z
1 n − 2
2 + ... + f n
λ
R
f
Eq. (a)
where ( Z f i / Ri ) (i=1,2,...,n) denotes the relative displacement, which was caused by the ith
triangle itself.
(Z
f1
) (
(
)
/ R1 = R f 2 / R 2 = ... = Z f n / R f
1
3 Rd
= cot α 2 − 1 ⋅ ⋅ i
2 Ri
λ
)
1
⋅ sec 2 α −
− 1
3
λ
Eq. (b)
Where
Rf
R
λ = i =
Ri −1 R0
1/ n
Eq. (c)
R d i / Ri = R d 1 / R1 = R d 2 / R 2 = ... = R d n / R f
so that Eq. (a)(Eq. (38) of Ref. [83]) can be expressed as follows:
Z ′f
R
= i
R f R0
Z f i
Ri
1 n −1 1 n − 2
2 + 2 + ... + 1
λ
λ
Eq. (d)
Because, as Equation (42) of Ref. [83] states,
1
2
λ
n −1
1
+ 2
λ
n−2
+ ... +
1
λ2
+1 =
1
1−
λ
2n
1
1−
λ
2
λ 2 n − 1 2(1− n )
λ
= 2
λ −1
Eq. (e)
Eq. (d) for final distortion becomes:
Z ′f
R
= i
R f R0
Z f i
Ri
λ2 n − 1 2(1− n )
2
λ − 1 λ
Eq. (f)
3.9.2.3.3
From Integer to Real Number of Triangles
The upper-bound solution for the multi-triangular velocity field for flow through conical
converging dies was developed by using a real number of n. The total power was then minimized
with respect to n, treated as a real number, using Eq. (25)..(36), as semi-cone angle, reduction and
friction coefficient were kept constant. The results are plotted as an envelope, shown in Figure
<65>. It is obviously observed that the value of deformation power losses, as n is a real number,
is always lower than that computed when n is considered an integer, except at several points of
tangency. Thus for the whole range of semi-cone angle (from 0° to 90°) the upper-bound
solution is associated with n as a real number.
Note that this is an expansion of the multi-triangular velocity field by a mathematical method.
Its physical meaning is not so direct and clear. But this development is reasonable and logical and
conforms to the actual situation.
Equation (f) can be used for the new method as n is a real number. Since the final
displacement is still a linear function of Ri, the characteristics of the final distorted grids are the
same as those for the uni-triangular field shown in Figure <64>.
3.9.2.3.4
Determination of the Final Distorted Grid
For the triangular velocity field, the final distorted grid is a function of friction, reduction and
cone angle.
The triangular velocity field is therefore used here for the detailed study of distortion. The
treatment is more complex than that obtained through the spherical field (Sec. {3.5}) but it adds
the effect of friction on distortion, which is missing in the treatment by the spherical field. The
change in the shape of the distorted grid is closely related to changes in the position of the apex
of the triangle (in uni-triangular field). Thus, first changes in the position of the apex are studied
as function of reduction die angle and friction. The value of l is the one related to the optimal
Rd/Ro found by optimizing J* of Eq. (11).
The value of the optimal l may be positive (the apex of the triangle lies behind the die
entrance), zero, or negative (the apex of the triangle lies in front of the die entrance).
Since it is easier to interpret the behavior of the triangular deformation region from the
characteristics of the parameter l/Ro, this characteristic is plotted in Figures <66> and <67>. The
value of the optimal l may be positive (the apex of the triangle lies behind the die entrance), zero,
or negative (the apex of the triangle lies in front of the die entrance). From Figures <66> and
<67>, one may observe that with decreasing values of friction (m) and of die angle (α) and with
increasing reduction in area (%R.A.) the apex of the triangle moves along the axis of symmetry
from the entrance side towards the exit.
Figures <68> and <69> are plots of relative displacement (for the particle Ri=Ro) vs. semicone angle with reduction as the parameter (from 10% to 90%) and a corresponding friction of m
= 1.0 (Fig. <68>) and m = 0.5 (Fig. <69>) by the uni-triangular velocity field.
Fig. 66
The effect of friction, reduction and die angle on the triangular shape.
Fig. 67 The effect of friction, reduction and die angle on the triangular shape.
In Figure <68>, as the semi-cone angle increases from a small value, value, the minimum relative
displacement will be found when an optimal value of semi-cone angle is reached. For larger
reductions, when a low friction value is assigned, as shown in Figure <69>, and as the semi-cone
angle increases, the value of the relative displacement will move from negative to positive, and
there will be no minimum point on the curve. Note that within the range in which the multitriangular velocity field is preferable, if the uni-triangular velocity field were used to calculate the
relative displacement, positive infinity (see dashed lines in Figs. <68> and <69>) or negative
infinity (see dashed line in Fig. <67>) values of relative displacement would be given as the
semi-cone angle becomes infinitely small. That is not a reflection of reality. In these ranges,
multitriangular fields replace the single triangle.
Fig. 68
Effect of reduction on final distortion.
Fig. 69 Effect of reduction on final distortion.
From figure <65> it can easily be observed that the multi-triangular velocity field will give the
lower power losses within the small semi-cone angle range. The smaller the semi-cone angle is,
the larger is the number of triangles that should be considered in the analysis. Figure <70>
represents the plots of the values of relative displacement by uni- and multi-triangular fields for
one combination of friction and reduction. The multi-triangular field gives the lower value of
relative displacement; the larger the number of triangles, the lower is the relative displacement
for a given angle. When the number of triangles is chosen by the upper-bound solution, the plots
of relative displacement vs. semi-cone angle would be a set of discontinuous curves (shown as
the solid lines in Fig. <70>). The intersection point between two curves of number n and n+1
(Fig. <65>) correspond to the discontinuity in Figure <70>. The ends of each solid line (Fig.
<70>) represent the angle at which the optimal number of triangles is being exchanged. Thus, if
only integer values of n are permissible, the characteristics of Zf/Rf will be rugged, as shown by
the circled line in Figure <70>.
Fig. 70
Relative dispacement vs. semi-cone angle using multi-triangular field.
For every section of the discontinuous curves, there is one upper boundary and one lower
boundary of relative displacement. If the upper boundary points are connected to each other, the
resulting curve moves down slowly and smoothly as the semi-cone angle gets smaller.
Conversely, if the lower boundary points are connected, that curve moves up, as shown by the
fine lines in Figure <70>. Both of these two curves will approach the same point when the semicone angle approaches zero.
In this study, the mathematical expansion of the multi- triangular field is emphasized. From
the envelope curve in Figure <65>, several combinations of the value of n and semi-cone angle α,
which give minimum value of deformation power losses, can be obtained. The value of the
relative displacement can then be obtained after substituting the combinations of the values of n
and semi-cone angle into Eq. (f). In Figure <70>, the dot-dash line is the plot of the values of
relative displacement corresponding to reduction of 70% and friction of m = 1.0 with the number
of triangles, n as a real number. The relative displacement approaches a finite value as the semicone angle of the die approaches zero.
Figures <71> and <72> show the plots of relative displacement vs. semi-cone angle with
reduction as the parameter and a corresponding friction of m = 1.0 (above) and m = 0.1 (Fig.
<72>) by the mathematical expansion of the multi-triangular velocity field. In Figure <71>, as
semi-cone angle increases (above) from zero, the minimum relative displacement will be found
when the optimal value of the semi-cone angle is reached. It is worth noting that for a fixed
value of friction, as reduction changes, the optimal die angle for minimum distortion does not
change (the optimal value of semi-cone angle, when m = 1, is ≈15° as shown in Fig. <10>). But
as friction lessens the optimal die angle for minimum distortion is always zero, that is, the smaller
the die angle, the smaller the distortion, as shown in Figure <11>.
Fig. 71
Relative displacement vs. semi-cone angle using mathematical expansion of multitriangular field. (n is real number).
Figure <73> represents the dependence of the minimum relative displacement on reduction and
friction. The minimum value of the relative displacement (at the optimizing die angle) increases
monotonously as reduction or friction increases.
Fig. 72
Relative displacement vs. semi-cone angle using mathematical expansion of multitriangular field. (n is real number).
Fig. 73 Minimum displacement vs. reduction in area.
BACK
NEXT