13.criteria for surrogate end points based on causal distributions
advertisement

J. R. Statist. Soc. B (2010)
72, Part 1, pp. 129–142
Criteria for surrogate end points based on causal
distributions
Chuan Ju and Zhi Geng
Peking University, Beijing, People’s Republic of China
[Received November 2008. Final revision September 2009]
Summary. When a treatment has a positive average causal effect (ACE) on an intermediate
variable or surrogate end point which in turn has a positive ACE on a true end point, the treatment
may have a negative ACE on the true end point due to the presence of unobserved confounders,
which is called the surrogate paradox. A criterion for surrogate end points based on ACEs has
recently been proposed to avoid the surrogate paradox. For a continuous or ordinal discrete
end point, the distributional causal effect (DCE) may be a more appropriate measure for a causal
effect than the ACE. We discuss criteria for surrogate end points based on DCEs. We show
that commonly used models, such as generalized linear models and Cox’s proportional hazard
models, can make the sign of the DCE of the treatment on the true end point determinable by the
sign of the DCE of the treatment on the surrogate even if the models include unobserved
confounders. Furthermore, for a general distribution without any assumption of parametric
models, we give a sufficient condition for a distributionally consistent surrogate and prove that
it is almost necessary.
Keywords: Causal diagram; Causal effect; Surrogate end point
1.
Introduction
In many biomedical studies, a surrogate end point is an attractive alternative when the true end
point is difficult to obtain. However, misuse of a surrogate may lead to severe consequences
and even disaster. A typical disastrous example of the unreliability of a surrogate end point was
reported by Fleming and DeMets (1996) and Moore (1995). Ventricular arrythmia is associated
with a significant increase in the risk for death, and thus it was hoped that suppressing ventricular
arrythmia would reduce the death rate. Three drugs were found to suppress arrythmia and were
approved by the Food and Drug Administration for use in patients with severely symptomatic
arrythmia. However, among patients who took these medicines, the death rate was not reduced
but significantly increased. As a result, approximately 50 000 people died (Moore, 1995). More
examples of surrogates causing problems in clinical trials can also be found in Fleming and
DeMets (1996) and Manns et al. (2006), such as CD4 cell counts for survival time in studies of
acquired immune deficiency syndrome and bone mass for fracture in osteoporosis studies. In
recent years, there have been many references questioning the validity and use of surrogate
markers (Fleming and DeMets, 1996; Baker, 2006; Alonso and Molenberghs, 2008).
Until now, there have been several criteria for surrogates. The first intuitive criterion requires
that there is a strong correlation between the surrogate and the true end point. But Baker and
Kramer (2003) illustrated that, for a strongly correlated surrogate, the treatment may have a
Address for correspondence: Zhi Geng, School of Mathematical Sciences, Peking University, Beijing 100871,
People’s Republic of China.
E-mail: zgeng@math.pku.edu.cn
© 2010 Royal Statistical Society
1369–7412/10/72129
130
C. Ju and Z. Geng
positive effect on the surrogate but a negative effect on the true end point. Prentice (1989)
proposed a criterion which requires the conditional independence of a treatment and the true
end point given the surrogate. Frangakis and Rubin (2002) and Rubin (2004) pointed out that
the conditional independence criterion may not satisfy the property of causal necessity, and
they proposed a principal surrogate criterion which satisfies the property. Lauritzen (2004) used
a causal network to depict a strong surrogate criterion and showed that a strong surrogate is
always a principal surrogate. On the basis of average causal effects (ACEs), Chen et al. (2007)
illustrated that, even for a principal surrogate or a strong surrogate, when a treatment has a
positive ACE on the surrogate which in turn has a positive ACE on the true end point, the
treatment may have a negative ACE on the true end point due to the presence of unobserved
confounders, which is called the surrogate paradox. In the case where an end point or response
is a continuous or ordinal discrete variable, the ACE may not be a suitable measure when
the response has different variances for different treatment levels or when some values of the
response mean special benefits or costs. Thus a more appropriate measure of causal effects
than the ACE may be the distributional causal effect (DCE), which is defined as the difference
between the cumulative distributions of potential responses for two different treatment levels.
In this paper, we present the notion of distributionally consistent surrogates (DCSs) based
on DCEs. We say that an intermediate variable is a DCS if a non-negative (0 or greater), a
non-positive (0 or less) and a null (0) DCE of a treatment on the surrogate imply a non-negative,
a non-positive and a null DCE of the treatment on the true end point respectively. Further we say
that it is a strict DCS if the inequalities in the conditions are strict (i.e. change ‘0 or greater’ and ‘0
or less’ to ‘greater than 0’ and ‘less than 0’ respectively). We shall show that, when the model between a treatment and an intermediator and the model between the intermediator and a true end
point are generalized linear models or Cox’s proportional hazard models, the intermediator will
be a strict DCS for the true end point even if the models include unobserved confounders. Furthermore we shall also present a sufficient condition for DCS end points for a general distribution
without any assumption of parametric models and prove that the condition is almost necessary.
The paper is organized as follows. In Section 2, we first give an example to illustrate some
problems with criteria for surrogate end points based on ACEs, and then we present the notions
of a DCS and strict DCS based on DCEs. In Section 3, we prove that distributional consistency
and strict distributional consistency are generally guaranteed under many commonly used models, such as generalized linear models and proportional hazard models. In Section 4, we give a
condition for DCSs for a general distribution without any assumption of parametric models.
In Section 5 we give some discussion. All proofs of the theorems are presented in Appendix A.
2.
Definitions of consistent surrogates based on causal distributions
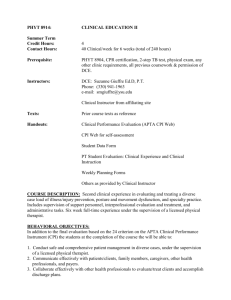
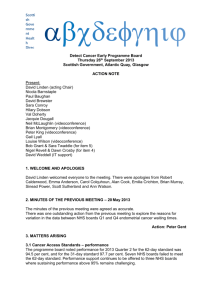
Lauritzen (2004) proposed the causal diagram in Fig. 1 to depict the relationship between a
treatment T , a surrogate S, a true end point Y and an unobserved confounder set U in a randomized trial, where T , S and Y are univariate, and U is univariate or multivariate, which
consists of all non-descendants of S and all non-descendants of Y except T and S. The arrows
from U to S and Y mean that all arrows between U and .S, Y/ are oriented from U to S or Y ;
in other words, there is no arrow from S or Y pointing at U. Since we focus on randomized
trials rather than observational studies, the unobserved confounder set U does not affect the
treatment T , but it may affect both the surrogate S and the true end point Y since usually the
surrogate cannot be randomized in a trial. In this paper we use this diagram to represent a
surrogate end point and all definitions and theoretical results will be based on this graphical
model, for which the joint probability can be factorized into
Criteria for Surrogate End Points
Fig. 1.
131
Causal diagram for depicting a surrogate (Lauritzen, 2004)
p.t, s, y, u/ = p.t/ p.u/ p.s|t, u/ p.y|s, u/
=
p.x|pax /,
x∈V
where V = {t, s, y, u} is the set of all variables and pax is the parent set of x. Let do.T = t/ denote
an external intervention to force treatment to level T = t. In the context of a randomized trial,
we only ever condition on an intervention do.T = t/, never on an observation T = t, and thus
we make all probabilities conditional on do.T = t/ and omit p.t/. Following the causal interpretation in Pearl (2000), the post-interventional distribution resulting from the intervention
do.X = x/ can be determined by deleting the factor p.x|pax / from the joint probability. Graphically the intervention do.X = x/ means that the arrows entering X are cut off. For the causal
diagram in Fig. 1, we have the post-intervention distributions
p{s, y, u|do.t/} = p.u/ p.s|t, u/ p.y|s, u/,
and
p{y, u|do.s/, do.t/} = p.u/ p.y|s, u/:
The ACE of a variable X on another variable Z for comparing two treatment levels x and x
(x > x ) is defined as
ACE{X → Z|do.x /, do.x /} = E{Z|do.x /} − E{Z|do.x /}:
Criteria for consistent surrogates based on ACEs were proposed by Chen et al. (2007) to avoid
the phenomenon that a treatment has a positive ACE on a surrogate which in turn has a positive
ACE on a true end point, but the treatment has a negative ACE on the true end point. Below
we give an example to illustrate that the ACE consistent surrogates have not completely avoided
the surrogate paradox and a more rigorous criterion for surrogate end points is needed.
2.1. Example 1
Moore (1995) described the dramatic story of one of the worst drug disasters. Irregular heart
beat, or arrythmia, was predictive of early mortality. A new drug approved by the Food and
Drug Administration in 1985 could lead to a reduction of the risk for arrythmia of a third.
However, taking the drug would increase the death rate by three times. An estimated 50 000
patients in the USA died because they took this and other antiarrhythmic drugs. Suppose that
the treatment T , the surrogate S and the unobserved confounder U are binary with values 0 and
1, and the true end point Y is ternary with values 0, 1 and 2. U may denote a particular gene or
heart injury that could affect both heartbeat and sudden death. Let T = 1 denote treatment, S = 1
correction of arrythmia, U = 0 heart injury, Y = 0 sudden death immediately, Y = 1 a survival
time within 5 years and Y = 2 a survival time of more than 5 years. The artificial probabilities
are shown in Table 1 with
132
C. Ju and Z. Geng
Table 1.
U
0
1
Artificial probabilities for example 1
P(S = 1|U = u, T = t)
P(Y = 0|U = u, S = s)
P(Y = 1|U = u, S = s)
T=0
T=1
S=0
S=1
S=0
S=1
0.95
0.75
0.7
0.99
1
0.01
0.03
0.01
0
0.8
0.2
0.1
P.Y = 2|U = u, S = s/ = 1 −
1
y=0
P.Y = y|U = u, S = s/
omitted and P.U = 0/ = 0:2. With the given probabilities we have that ACE{T → S|do.T =
1/, do.T = 0/} = 0:14 > 0, ACE{S → Y |do.S = 1/, do.S = 0/} = 0:40 > 0 and ACE{T → Y |do.T =
1/, do.T = 0/} = 0:05 > 0. According to the definition of a consistent surrogate based on ACEs,
the surrogate S is an ACE consistent surrogate for the true end point Y. But it can be shown that
the treatment T increases the death rate by three times (i.e. P.Y = 0|T = 1/=P.Y = 0|T = 0/ = 3:05)
even if it reduces the risk of arrythmia to a third (i.e. P.S = 0|T = 1/=P.S = 0|T = 0/ = 0:32), which
fit the numbers in Moore (1995) very well. Thus the surrogate S does not raise a surrogate paradox based on ACEs, but it raises a surrogate paradox based on causal distributions, i.e. T has
a positive distributional causal effect on S in the sense that the causal distribution of S given
do.T = 1/ stochastically dominates the causal distribution of S given do.T = 0/, and S also has
such a positive distributional causal effect on Y , but T may still have a negative causal effect
on Y. This example explains that a consistent surrogate based on ACEs may not be a good
criterion for some applications. Thus we now introduce a more rigorous criterion for surrogates
based on causal distributions to avoid this problem.
Definition 1. The DCE of a variable X on another variable Z for a specific threshold z comparing two treatment levels x and x .x > x / is defined as the difference of post-intervention
cumulative probabilities
DCE{X → .Z > z/|do.x /, do.x /} = P{Z > z|do.x /} − P{Z > z|do.x /}:
We say that X has a non-negative, non-positive or null DCE on Z if, for any two levels x > x ,
DCE{X → .Z > z/|do.x /, do.x /} is respectively greater than or equal to, less than or equal
to or equal to 0 for all z. If, in addition, there are z and x > x such that DCE{X → .Z >
z/|do.x /, do.x /} is greater than or less than 0, then we say that X has respectively a positive
or negative DCE on Z. We have a non-negative DCE of X on Z if and only if the distribution of Z given do(x) is stochastically non-decreasing in x. Note that DCE depends on a
specific threshold z but the sign (negative, positive or zero) of the DCE does not. Hereafter
we compare only two levels t and t of treatment T. For a treatment T with more than two
levels, we can compare its levels pairwise, and thus we assume that T is binary without loss of
generality.
In applications of surrogates, we observe a surrogate S instead of observing the true end point
Y , and the confounder U is unobserved. Thus the distribution of the observed variables .T , S/
can be evaluated from observed data, but the conditional distributions of Y and the marginal
distribution of U cannot be observed. Below we give definitions of a DCS end point and a strict
DCS end point such that they can be used to assess the effect of the treatment T on the true
Criteria for Surrogate End Points
133
end point Y when we have prior knowledge about the sign of the DCE of S on Y , in spite of
the unobserved variables.
Definition 2. An intermediate variable S in Fig. 1 is a DCS end point for Y if
(a) for a non-negative DCE of S on Y , a non-negative or a non-positive DCE of T on S
implies respectively a non-negative or non-positive DCE of T on Y ,
(b) for a non-positive DCE of S on Y , a non-negative or non-positive DCE of T on S implies
respectively a non-positive or non-negative DCE of T on Y and
(c) a null DCE of T on S implies a null DCE of T on Y.
By this definition, a DCS end point ensures that the sign (non-strict inequalities) of the DCE
of the treatment T on the surrogate S can determine the sign (non-strict inequalities) of the
DCE of the treatment T on the true end point Y. Thus the surrogate paradox does not occur in
the DCE context, although it is still possible for the treatment T to have a positive or negative
DCE on the surrogate S but a null DCE on the true end point. Further we introduce the strict
notion as follows.
Definition 3. An intermediate variable S in Fig. 1 is a strict DCS end point for Y if
(a) for a positive DCE of S on Y , a positive or negative DCE of T on S implies respectively
a positive or negative DCE of T on Y ,
(b) for a negative DCE of S on Y , a positive or negative DCE of T on S implies respectively
a negative or positive DCE of T on Y and
(c) a null DCE of T on S implies a null DCE of T on Y.
In definitions 2 and 3, we implicitly require that the DCE of T on S has the same sign for all
thresholds s and also that the DCE of S on Y has the same sign for all thresholds y. From the
equation
∞
0
E.X/ =
P.X > x/dx −
{1 − P.X > x/} dx
−∞
0
(Chung (1974), page 49), we have that
ACE{X → Z|do.x /, do.x /} =
∞
−∞
DCE{X → .Z > z/|do.x /, do.x /} dz:
Thus the sign of a DCE implies that the corresponding ACE has the same sign (note that
P.Z > z/ is right continuous in z). For example, a positive DCE and a non-negative DCE imply
a positive ACE and a non-negative ACE respectively. According to the definitions, a (strictly)
consistent surrogate based on DCEs is also a (strictly) consistent surrogate based on ACEs.
From example 1, however, it can be seen that the converse is not true.
We define the conditional DCE of T on S given U = u as
DCE{T → .S > s/|do.t /, do.t /, u} = P{S > s|do.t /, u} − P{S > s|do.t /, u},
and we also define DCE{T → .Y > y/|do.t /, do.t /, u} and DCE{S → .Y > y/|do.s /, do.s /, u}
similarly. Then we have the following relationship between the conditional DCEs on the causal
pathway from T to Y.
Lemma 1. If T has a non-negative conditional DCE on S given U = u, and S has a nonnegative conditional DCE on Y given U = u, then T has a non-negative conditional DCE on
Y given U = u.
From lemma 1, we see that, when U is empty, a non-negative or non-positive DCE of T on
134
C. Ju and Z. Geng
Table 2. A set of probabilities when U
is empty
S
−1
0
1
P(S = s|T = t)
P(Y = y|S = s)
T=0
T=1
Y=0
Y=1
0
0.9
0.1
0.1
0
0.9
0.9
0.11
0.1
0.1
0.89
0.9
S and a non-negative DCE of S on Y imply respectively a non-negative or non-positive DCE
of T on Y. But this is not true with ACEs. For example, for the probabilities that are given in
Table 2, we have ACE{T → S|do.T = 1/, do.T = 0/} = 0:7 > 0, ACE{S → Y |do.S = 0/, do.S =
−1/} = 0:79 > 0 and ACE{S → Y |do.S = 1/, do.S = 0/} = 0:01 > 0, but ACE{T → Y |do.T =
1/, do.T = 0/} = −0:071 < 0.
3.
Models for which an intermediator is a consistent surrogate
In this section, we show that strict distributional consistency is guaranteed by a large class of
commonly used models including generalized linear models and proportional hazard models.
3.1. Generalized linear models and extensions
Suppose that the true end point Y is from the exponential family which has densities of the
form
yθ − b.θ/
p.y; θ, φ/ = exp
+ c.y, φ/ ,
a.φ/
and also suppose that the intermediator S is from a (typically) different exponential family
with different functions a.·/, b.·/ and c.·/. Further we make a commonly used assumption
for generalized linear models that the dispersion parameter φ is constant over individuals, as
described in section 2.2 of McCullagh and Nelder (1989). Let ai , bi , . . . denote parameters, and
let ai .·/, bi .·/, . . . denote unknown functions. First we consider the following model:
g{E.Y |S = s, U = u/} = a1 s + c1 .u/,
h{E.S|T = t, U = u/} = a2 t + c2 .u/,
where g.·/ and h.·/ are strictly monotone link functions (model A).
The generalized linear model that was proposed by McCullagh and Nelder (1989) is a special
case of model A. We have the following result for model A.
Theorem 1. For model A, the intermediator S is a strict DCS for the true end point Y.
Next we consider a more general model:
g{E.Y |S = s, U = u/} = a1 .s/ b1 .u/ + c1 .u/,
h{E.S|T = t, U = u/} = a2 .t/ b2 .u/ + c2 .u/,
where g.·/ and h.·/ are strictly monotone link functions (model B).
Criteria for Surrogate End Points
135
Model B can be seen as a generalization of model II in Chen et al. (2007): E.Y |U = u, S = s/ =
h.u/s + g.u/ and E.S|U = u, T = t/ = q.t/ + r.u/. We show below that, for model B with some
additional conditions, S is a DCS.
Theorem 2. For model B, if a1 .s/ and a2 .t/ are monotone functions, and both b1 .u/ and b2 .u/
do not change their signs with changes in u, then S is a DCS for the true end point Y.
3.2. Proportional hazard models
Proportional hazard models proposed by Cox (1972) are frequently used for survival data. We
consider the following model to guarantee strict distributional consistency:
λ.y|S = s, U = u/ = λ0 .y/ exp{a1 s + c1 .u/},
λÅ .s|T = t, U = u/ = λÅ0 .s/ exp{a2 t + c1 .u/},
where λ.·/ and λÅ .·/ denote hazard functions and λ .·/ and λÅ .·/ are baseline hazards (model
0
0
C).
Theorem 3. For model C, S is a strict DCS for the true end point Y.
Consider the Cox models λ.y|S = s, U = u/ = λ0 .y/ exp.a1 s + b1 u/ and λ .s|T = t, U = u/ =
Clearly, this belongs to model C and so S is a strict DCS for Y under the
Cox model.
We consider the following generalization of model C:
λ0 .s/ exp.a2 t + b2 u/.
λ.y|S = s, U = u/ = λ0 .y/{a1 .s/ b1 .u/ + c1 .u/},
λÅ .s|T = t, U = u/ = λÅ .s/{a .t/ b .u/ + c .u/},
0
2
2
2
where λ.·/ and λÅ .·/ denote hazard functions and λ0 .·/ and λ0Å .·/ are baseline hazards (model
D).
Theorem 4. For model D, if a1 .s/ and a2 .t/ are monotone functions, and both b1 .u/ and b2 .u/
do not change their signs with changes in u, then S is a DCS for the true end point Y.
3.3. Hybrid models
Model A and model C (and also model B and model D) have similar structures. Our results
can be extended to a hybrid model from models A–D, in which each equation may come from
a different model. For example, model AC denotes that the first model equation for Y comes
from model A, and the second model equation for S comes from model C. Similarly we can
have other hybrid models, and we have the following results.
Corollary 1. For models AC and CA, S is a strict DCS for Y. For models BD and DB, S is a
DCS for Y if a1 .s/ and a2 .t/ are monotone functions and both b1 .u/ and b2 .u/ do not change
their signs with changes in u.
Below we give some examples to illustrate our results in this section and also give some
extended models.
3.4. Example 2
Strict DCS holds for all common parametric models and their combinations in Table 3 where
.X, Z/ are replaced by .Y , S/ and .S, T/. Also the strict DCS holds for linear regressions with
non-normal errors.
136
C. Ju and Z. Geng
Table 3.
holds
Common parametric models for which strict DCS
Type of regression
Linear
Logistic
Poisson
Cox
4.
Form
E.X|Z = z, U = u/ = az + b.u/
logit{p.X = 1|Z = z, U = u/} = az + b.u/
log{E.X|Z = z, U = u/} = az + b.u/
λ.x|Z = z, U = u/ = λ0 .x/ exp{ax + b.u/}
Consistent surrogates for general distributions
In the previous section, we assumed that S and Y follow the exponential family distributions
or some commonly used models. In this section, we only assume the causal diagram in Fig. 1
for T , S, Y and U , but we do not make any assumption about their distributions. We shall first
present a general sufficient condition for a DCS and then show that it is almost necessary.
First, we show the sufficient condition for a DCS in the following theorem. Following the
graphical terminology in Pearl (2000), a backdoor path from S to Y is a path between S and
Y with an arrow pointing at S. A subset U Å of U blocks a backdoor path p from S to Y if p
contains a chain i → m → j or a fork i ← m → j such that m is in U Å , or if p contains a collider
i → m ← j such that m is not in U Å and no descendant of m is in U Å . Intuitively, when U Å blocks
all backdoor paths between S and Y , the confounding bias between S and Y is removed by
conditioning on U Å .
Theorem 5. Suppose that U Å is a subset of U that blocks all backdoor paths from S to Y.
Then S is a DCS for the true end point Y for any distribution on U Å if
(a) the DCE of S on Y conditional on U Å = uÅ has the same sign for all uÅ and
(b) the DCE of T on S conditional on U Å = uÅ has the same sign for all uÅ .
The confounder set U may contain many latent factors in a complex mechanism. U Å can be
defined as the parent set paS or paY , and then all backdoor paths from S to Y will be blocked.
Here we compare the conditions in theorem 5 with the conditions for consistent surrogates
based on ACEs in theorem 1 of Chen et al. (2007):
(a) the expectation of Y on S is monotonic conditionally on U (i.e. ACE{S → Y |do.s /, do.s /,
u} 0 for all s > s and u, or ACE{S → Y |do.s /, do.s /, u} 0 for all s > s and u), and
(b) T is a risk (or preventive) factor to S (i.e. P.S s|t , u/ − P.S s|t , u/ 0 for all s, u and
t > t , or P.S s|t , u/ − P.S s|t , u/ 0 for all s, u and t > t ).
Comparing the two conditions, we see that, first, our condition (a) requires monotonicity on
distribution, whereas Chen’s condition (a) only requires monotonicity on expectation, and the
former is stronger than the latter; second, our condition (b) is the same as Chen’s condition (b);
third, we generalize the set U in the conditions to any subset U Å which blocks all backdoor
paths from S to Y. Below we give an example to illustrate the generality.
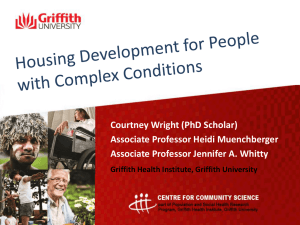
4.1. Example 3
Consider example 1 again, where U = {U0 , U1 , U2 } denotes three unknown genes with binary
values. Suppose that gene U1 affects both arrythmia S and gene U2 , gene U2 affects survival
Y , and gene U0 affects both U1 and U2 , as shown in Fig. 2. Further assume that the causal
Criteria for Surrogate End Points
Fig. 2.
137
Causal diagram with three unknown genes
Table 4.
U2
P(Y = 0|U2 , S)
P(Y = 1|U2 , S)
P(Y = 2|U2 , S)
S =0
S =1
S =0
S =1
S =0
S =1
y=0
y=1
0.1
0.2
0.2
0.1
0.3
0.2
0.1
0.2
0.6
0.6
0.7
0.7
−0:1
0.1
0.1
0.1
0
1
Table 5.
U1
0
1
P .Y jU2 , S/ and DCE{S ! .Y > y/jdo.S D 1/, do.S D 0/, U2 } in example 3
DCE{S → (Y > y)|U2 }
P .Y jU1 , S/ and DCE{S ! .Y > y/jdo.S D 1/, do.S D 0/, U1 } in example 3
P(Y = 0|U1 , S)
P(Y = 1|U1 , S)
P(Y = 2|U1 , S)
S =0
S =1
S =0
S =1
S =0
S =1
y=0
y=1
0.19
0.18
0.11
0.12
0.21
0.22
0.19
0.18
0.6
0.6
0.7
0.7
0.08
0.06
0.1
0.1
DCE{S → (Y > y)|U1 }
diagram has the probabilities given in Table 4, with P.U2 = 0|U1 = 0/ = 0:1, P.U2 = 0|U1 =
1/ = 0:2, P.S = 0|T = 0, U1 = 0/ = P.S = 0|T = 1, U1 = 1/ = 0:2, P.S = 0|T = 1, U1 = 0/ = 0:1 and
P.S = 0|T = 0, U1 = 1/ = 0:3.
From these probabilities, we have P.Y = y|U1 = u, S = s/ in Table 5. Clearly, the DCE of S on
Y conditional on U1 = u1 has the same sign for all u1 as shown in Table 5, whereas the DCE of
S on Y conditional on U2 = u2 (or equivalently conditional on U = u) does not have the same
sign for all u2 as shown in Table 4. Nevertheless, according to theorem 5 with U Å = U1 , the
intermediator S is a DCS for Y. This example illustrates that U Å may be an arbitrary subset of
U as long as all backdoor paths from S to Y are blocked.
Since we suppose that the confounder set U is not observed, the conditions in theorem 5 are
untestable from data, and their validity must be argued by prior knowledge. Our condition (a)
means that the surrogate S is a risk (or preventive) factor for the true end point Y , and our
condition (b) means that the treatment T has the same sign of DCE on the surrogate S for all
U Å = uÅ . For example, smoking T = 1 increases the amount S of tar deposited in a person’s lung
at a distribution level regardless of a person’s background factors (i.e. condition (b) holds), and
a larger amount of tar also increases the likelihood of lung cancer regardless of background
variables (i.e. condition (a) holds). Thus, under the causal diagram in Fig. 1, the amount S of
tar is a DCS for lung cancer Y.
138
C. Ju and Z. Geng
Next, we show that the sufficient condition that is given in theorem 5 is also almost necessary.
In the following theorem, we consider the causal diagram in Fig. 1 again, and we consider
the probabilities P.S s|U Å = uÅ , T = t/ and P.Y y|U Å = uÅ , S = s/ as continuous random
variables for any given s, uÅ , t and y, where U Å is a subset of U. We say that the probability
P.Y y|U Å = uÅ , S = s/ is continuous with respect to the continuous variables in U Å if, as a
function of U Å = uÅ , P.Y y|U Å = uÅ , S = s/ is continuous in these variables. This means that
the conditional probability does not change dramatically for a small change in any continuous
variable in U Å . For example, if age is a continuous variable in U Å , then a very small change
of age may not lead to a dramatic difference in the risk of cancer. This does not require the
probability to be continuous with respect to discrete variables in U Å .
Theorem 6. Suppose that both P.S s|U Å = uÅ , T = t/ and P.Y y|U Å = uÅ , S = s/ are continuous with respect to the continuous variables in U Å where U Å is a subset of U. If S is a DCS
for the true end point Y for any distribution on U Å , then conditions (a) and (b) in theorem 5
hold with probability 1.
From theorem 6, it can be seen that the sufficient condition for a DCS that is given in theorem
5 is also almost necessary.
5.
Discussion
The reliability of surrogate end points is especially important in biomedical studies. Misuse of
surrogates can lead to serious consequences, like the drug disaster that was described in Moore
(1995). In this paper, we showed that the ACE consistency proposed by Chen et al. (2007) is
insufficient to avoid these problems. To avoid surrogate paradoxes completely, we introduced
DCS end points, which are more reliable than ACE-based consistent surrogate end points. For a
DCS end point S, the traditional methods for data analysis can be used for statistical inference
on the DCE of T on S, and then the result can be used to explain the sign of the DCE of T on
Y without observing the true end point Y.
We have given some conditions for validating DCS end points. Since we suppose that neither
the true end point Y nor the confounder set U is observed, these conditions for DCS end points
are not directly testable from data. But they are satisfied under many commonly used models
and can serve as a guideline for the evaluation of surrogate end points in practice. From the
results in Section 3, the intermediator S is always a DCS if we know or assume that the commonly used generalized linear models, proportional hazard models or some of their extensions
hold among the variables. In particular, under structural equation models, the intermediator S
is always a strict DCS end point for the true end point Y.
As shown in Section 4, when there are no parametric model assumptions, we must assume
that T and S are preventive (or risk) factors to S and Y respectively, conditionally on the unobserved confounder U or a subset U Å of U which blocks all backdoor paths from S to Y. Now
we discuss how to assess the validity of these assumptions. First we need to determine U Å . If
we have the complete diagram (e.g. the diagram in Fig. 2), then U Å can be a set which blocks
all backdoor paths from S to Y ; otherwise, by prior knowledge, we may choose a subset U Å of
U which contains the parent set paS or paY . Next we need to judge conditions (a) and (b) in
theorem 5 conditionally on the selected set U Å . Essentially, these conditions require that T and
S have monotonic causal effects on S and Y at the distributional level respectively, and they
are weaker than the monotonicity assumption at the individual level that was used by Imbens
and Angrist (1994) for identifying causal effects. For example, for any subpopulation defined
by U Å = uÅ (e.g. age or gender), smoking T always increases the probability of having a higher
Criteria for Surrogate End Points
139
amount of tar S in the lung, and the amount of tar S always increases the probability for lung
cancer Y , although smoking may decrease tar or tar may prevent cancer for some particular
individuals.
We could also check these conditions by observing more variables. From the causal diagram
in Fig. 1, we can see that U is a confounder set between S and Y. If the confounder set U or
the parent set paS of S can be determined by prior knowledge and is observed, then we can
check the model for S and condition (b) in theorem 5 from data; if Y and paY can be observed,
then we can check the model for Y and condition (a) in theorem 5 from data. If the models
in Section 3 or the conditions in Section 4 hold, then S is a DCS end point. Otherwise, we
should evaluate the surrogate end point within each subpopulation stratified by the variables
that led to effect reversal. For example, in example 1, it is heart injury that led to effect reversal,
and thus we should evaluate the surrogate end point for survival time separately within the two
subpopulations stratified by heart injury.
As a referee commented on theorem 5, the subset U Å which blocks all backdoor paths
from S to Y in theorem 5 can be replaced by a vector-valued function U Å = f.U/ that makes
Y⊥
⊥ U|.S, U Å / hold. With such a U Å , we have from T ⊥
⊥ Y |.S, U, U Å / that T ⊥
⊥ Y |.S, U Å /, and we
Å
Å
can also verify that P{Y y|do.s/, u } = P.Y y|s, u /. Similarly to the proof of theorem
5, we can show that the conclusion of theorem 5 is also true for such a U Å . As an application, we consider the case where Y and S are both binary. In this case, we can take U Å to be
{P.Y = 1|S = 0, U/, P.Y = 1|S = 1, U/}, and then we have Y ⊥
⊥ U|.S, U Å / because the distribuÅ
tion of Y conditional on .S, U/ is fully determined by U and S. This provides a useful way of
finding a specific U Å . If U Å is restricted to a subset of U , then the conditional independence
Y⊥
⊥ U|.S, U Å / generally implies paY ⊆ U Å , which in turn implies the supposition that is required
in theorem 5 that U Å blocks all backdoor paths from S to Y.
The potential application of our results to situations where there is an additional ‘direct effect’
between T and Y needs to be investigated further in our future work. More generally, if we
consider a surrogate as an intermediate variable, then the results in this paper may also be useful
for instrumental variable methods, effect modification and validation criteria for biomarkers.
Acknowledgements
We thank the Joint Editor, the Associate Editor and two referees for their valuable comments
and suggestions that greatly improved the previous version of this paper, and we greatly appreciate a referee’s contribution to our proofs. This research was supported by the Natural Science
Foundation of China (grants 10771007, 10721403 and 10931002) and Ministry of Education–
Microsoft Key Laboratory of Statistics and Information Technology of Peking University.
Appendix A: Proofs of theorems
First we give two lemmas to be used in the proofs of the theorems.
Lemma 2. Suppose that X is stochastically larger than Y (i.e. P.X > c/ P.Y > c/ for all c). Let f
be a non-decreasing function. Then E{f.X/} E{f.Y/}. Further, if X is strictly stochastically larger
than Y (i.e. P.X > c/ > P.Y > c/ for some c) and f is increasing, then E{f.X/} > E{f.Y/}.
Proof. This result can be obtained directly from the equality
0
∞
P.X > x/ dx −
{1 − P.X > x/} dx
E.X/ =
0
−∞
(Chung (1974), page 49) and the right continuity of cumulative distribution functions.
140
C. Ju and Z. Geng
Lemma 3. Suppose that X1 and X2 are from the exponential family with the density function in
Section 3.1 with a fixed φ. Let p = inf x∈R {p.x; θ, φ/ > 0} and q = supx∈R {p.x; θ, φ/ > 0}. If E.X1 / >
E.X2 /, then X1 is stochastically larger than X2 , and further we have P.X1 > c/ > P.X2 > c/ for all
c ∈ .p, q/.
Proof. Without loss of generality assume that a.φ/ > 0. With a fixed φ, the exponential family distributions exhibit a monotone likelihood ratio in θ. From lemma 3.4.2 (ii) of Lehmann and Romano (2005),
page 70, for any θ > θ , we have Pθ .X > x/ Pθ .X > x/ for all x. In addition, from theorem 3.4.1 (ii) of
Lehmann and Romano (2005), page 66, we have that, for c ∈ .p, q/, Pθ .X > c/ is strictly increasing in θ.
Thus, from lemma 2, E.X/ is also strictly increasing in θ. If E.X1 / > E.X2 /, we obtain θX1 > θX2 , and hence
the result follows.
A.1. Proof of lemma 1
Under the causal diagram in Fig. 1, we have P{Y > y|do.t/, u} = E{f.S, u/|do.t/, u} where f.s, u/ = P{Y >
y|do.s/, u}. By the conditions of lemma 1, S is stochastically non-decreasing in t given u, and f.s, u/ is a
non-decreasing function of s. From lemma 2, T has a non-negative DCE on Y given u.
A.2. Proof of theorem 1
We first prove condition (a) in definition 3. Without loss of generality, assume that g.·/ and h.·/ are increasing functions. Then a positive DCE of T on S implies that a2 > 0 in model A, and thus by lemma 3 the
causal distribution of S given do.T = t/ and U = u is stochastically increasing in t for each u. Similarly, a
positive DCE of S on Y implies that a1 > 0 and from lemma 3 f.s, u/ = P{Y > y|do.s/, u} is an increasing
function of s, where p < y < q (p and q are as defined in lemma 3). From lemma 2 and
P{Y > y|do.t/, u} = E{f.S, u/|do.t/, u},
we have that P{Y > y|do.t/, u} is increasing in t for each u. From
P{Y > y|do.t/} = E[P{Y > y|do.t/, U}],
we obtain that T has a positive DCE on Y. In the same way, we can prove conditions (b) and (c) in
definition 3, and thus S is a strict DCS for Y.
A.3. Proof of theorem 2
We prove condition (a) in definition 2. Without loss of generality, assume that g.·/ and h.·/ are increasing
functions. By the conditions of theorem 2 and lemma 3, a non-negative DCE of T on S implies that
a2 .t/ b2 .u/ is non-decreasing in t for each u, and thus T has a non-negative conditional DCE on S for
each U = u. Similarly, a non-negative DCE of S on Y implies that S has a non-negative conditional
DCE on Y for each U = u. From lemma 1, T has a non-negative conditional DCE on Y for each U = u.
By
P{Y > y|do.t/} = E{P.Y > y|do.t/, U},
we obtain that T has a non-negative DCE on Y. In the same way, we can prove conditions (b) and (c) in
definition 2, and thus S is a DCS for Y.
A.4. Proof of theorem 3
Let G.y/ = P.Y > y/. From the definition of λ.y/ in Cox (1972),
G .y/
P.Y y + Δy|Y > y/
=−
,
λ.y/ = lim
Δy→0+
Δy
G.y/
y
y
we have G.y/ = exp{− 0 λ.u/ du}. Hence, G.y|s, u/ = G0 .y/a1 s+c1 .u/ where G0 .y/ = exp{− 0 λ0 .u/ du}.
Thus a positive DCE of S on Y implies that a1 < 0. Similarly, a positive DCE of T on S implies that a2 < 0.
The rest of the proof is the same as the last part of the proof for theorem 1.
Criteria for Surrogate End Points
141
A.5. Proof of theorem 4
Using the equations G.y|s, u/ = G0 .y/a1 .s/b1 .u/+c1 .u/ and GÅ .s|t, u/ = G0Å .s/a2 .t/b2 .u/+c2 .u/ , we can prove the
result in the same way as for theorem 2.
A.6. Proof of corollary 1
For model AC and model CA, the strict consistency can be proved in the same way as for theorem 1; for
model BD and model DB, the distributional consistency can be proved in the same way as for theorem 2.
A.7. Proof of theorem 5
Since U Å blocks all backdoor paths from S to Y , we have P{Y > y|do.s/, uÅ } = P.Y > y|s, uÅ / from theorem
3.4.1 of Pearl (2000). Similarly we also have P{S > s|do.t/, uÅ } = P.S > s|t, uÅ /. For the diagram in Fig. 1,
all paths from T to Y must pass a parent node of S except for the path T → S → Y . Since U Å blocks all
backdoor paths from S to Y , we know that the paths from T to Y are blocked either by S or by U Å . Thus
we have the conditional independence T ⊥
⊥ Y |.S, U Å /, and so we have
P{Y > y|do.t/, uÅ } = E{f.S, uÅ /|do.t/, uÅ }
where
f.s, uÅ / = P{Y > y|do.s/, uÅ } = P.Y > y|s, uÅ /:
Then we can obtain the theorem from lemma 2.
A.8. Proof of theorem 6
Let
DCE{T → .S > s0 /|do.t /, do.t /, uÅ } = a.uÅ /,
DCE{S → .Y > y0 /|do.s /, do.s /, uÅ } = b.uÅ /
and
DCE{T → .Y > y0 /|do.t /, do.t /, uÅ } = c.uÅ /
for some s0 , y0 and s > s .
When U Å is a binary variable taking values in {0, 1}, since
DCE{T → S|do.t /, do.t /} DCE{S → Y |do.s /, do.s /} DCE{T → Y |do.t /, do.t /} 0,
for any distribution on U Å , we have
{p a.0/ + .1 − p/ a.1/} {p b.0/ + .1 − p/ b.1/} {p c.0/ + .1 − p/ c.1/} 0,
where p = P.U Å = 0/. Take
∀p ∈ [0, 1],
f.t/ = {a.0/t + a.1/} {b.0/t + b.1/} {c.0/t + c.1/},
and then f.t/ 0, ∀t ∈ [0, ∞/. Because S is a DCS for U Å = 0, we know that a.0/ b.0/ c.0/ 0; thus the leading coefficient of f.t/ is non-negative. Since a.uÅ / and b.uÅ / are continuous random variables in [−1, 1],
the three roots of f.t/ are mutually distinct with probability 1. Thus a.0/ a.1/ 0 and b.0/ b.1/ 0 almost
surely, or otherwise f.t/ < 0 on some interval in [0, ∞/.
When U Å is a discrete random variable taking values in {u1 , u2 , . . . un , . . . }, we take two arbitrary elements ui and uj from the set. With the arguments above, we obtain a.ui / a.uj / 0 and b.ui / b.uj / 0 with
probability 1. Since these pairs of ui and uj are enumerable and a countable union of null events is still a
null event, we know that a.ui / a.uj / 0 and b.ui / b.uj / 0 for all ui and uj with probability 1.
When U Å is a continuous random variable taking values in an interval I ⊆ R, because I ∩ Q is an enumerable set, we have that, with probability 1, a.ui / a.uj / 0 and b.ui / b.uj / 0 for all ui and uj in I ∩ Q.
Since I ∩ Q is dense in I , by using continuity of a.u/ and b.u/ we know that a.u/ a.u / 0 and b.u/ b.u / 0
for all u and u in I with probability 1.
142
C. Ju and Z. Geng
When U Å is a random vector, similarly by choosing two arbitrary points from an enumerable dense
set and then using continuity, we know that a.u/ a.u / 0 and b.u/ b.u / 0 for all u and u with probability 1.
For fixed uÅ , t and t , DCE{T → .S > s/|do.t /, do.t /, uÅ } has the same sign for all s; otherwise, for
the subpopulation of U Å = uÅ , S will not be a DCS. We have just proved that a.uÅ / has the same sign
for all uÅ almost surely; thus the DCE of T on S conditional on U Å = uÅ has the same sign for all uÅ
with probability 1. Similarly the DCE of S on Y conditional on U Å = uÅ has the same sign for all uÅ with
probability 1.
References
Alonso, A. and Molenberghs, G. (2008) Surrogate end points: hopes and perils. Exprt Rev. Pharmecon. Outcms
Res., 8, 255–259.
Baker, S. G. (2006) Surrogate endpoints: wishful thinking or reality? J. Natn. Cancer Inst., 98, 502–503.
Baker, S. G. and Kramer, B. S. (2003) A perfect correlate does not a surrogate make. BMC Med. Res. Methodol.,
3, article 16.
Chen, H., Geng, Z. and Jia, J. (2007) Criteria for surrogate end points. J. R. Statist. Soc. B, 69, 919–932.
Chung, K. L. (1974) A Course in Probability Theory, 2nd edn. New York: Academic Press.
Cox, D. R. (1972) Regression models and life-tables (with discussion). J. R. Statist. Soc. B, 34, 187–220.
Fleming, T. R. and DeMets, D. L. (1996) Surrogate end points in clinical trials: are we being misled? Ann. Intern.
Med., 125, 605–613.
Frangakis, C. E. and Rubin, D. B. (2002) Principal stratification in causal inference. Biometrics, 58, 21–29.
Imbens, G. W. and Angrist, J. (1994) Identification and estimation of local average treatment effects. Econometrica,
62, 467–475.
Lauritzen, S. L. (2004) Discussion on causality. Scand. J. Statist., 31, 189–192.
Lehmann, E. L. and Romano, J. P. (2005) Testing Statistical Hypotheses, 3rd edn. New York: Springer.
Manns, B., Owen, W. F., Winkelmayer, W. C., Devereaux, P. J. and Tonelli, M. (2006) Surrogate markers in clinical
studies: problems solved or created? Am. J. Kidney Dis., 48, 159–166.
McCullagh, P. and Nelder, J. A. (1989) Generalized Linear Models, 2nd edn. London: Chapman and Hall.
Moore, T. (1995) Deadly Medicine: Why Tens of Thousands of Patients Died in America’s Worst Drug Disaster.
New York: Simon and Schuster.
Pearl, J. (2000) Causality: Models, Reasoning, and Inference. Cambridge: Cambridge University Press.
Prentice, R. L. (1989) Surrogate endpoints in clinical trials: definition and operational criteria. Statist. Med., 8,
431–440.
Rubin, D. B. (2004) Direct and indirect causal effects via potential outcomes. Scand. J. Statist., 31, 161–170.