CLOSED-LOOP POSITION CONTROL SYSTEMS
advertisement

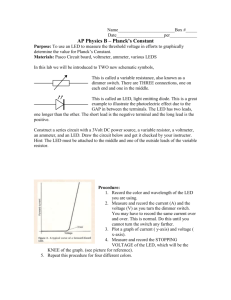
LABORATORY MODULE ENT 364 CONTROL SYSTEMS Semester 1 (2008/2009) EXPERIMENT # 1 SERVO NAME: PROGRAMME: DATE: GROUP: School of Computer & Communication Engineering University of Malaysia Perlis EXPERIMENT CLOSED-LOOP POSITION CONTROL SYSTEMS 1. OBJECTIVE 1.1. Established the operating characteristic of the Pre-Amplifier. 1.2. Observed the action of a simple motor driven closed-loop position control system. 2. INTRODUCTION 2.1.In this assignment we will look at the Pre-amplifier PA150C which has two signal inputs and outputs. If the is positive voltage on either of its inputs then one of its outputs becomes positive. Whilst if one of its outputs becomes negatives then the other output becomes positive. Before we use the PA150C to control motor, we will carry out a practical to find its characteristics. 2.2.In a position control system it is of great importance that there should be a smooth stop at any required position. If there is an overshoot then there must be a reverse movement to compensate. If movement is rapid where the system gain is high, its becomes very difficult to get smooth, accurate arrest. Indeed, the correcting movement might also produce an overshoot that will again need correction and in an extreme case a system could be moving to and fro across a required position is a state of instability. 3. COMPONENT AND EQUIPMENT 3.1. 3.2. 3.3. 3.4. 3.5. 3.6. 3.7. 3.8. 3.9. OA150A-Op Amp 1 unit AU150B-Attuenuator 1 unit PA150C-Pre-Amp 1 unit SA150D-Servo Amplifier 1 unit PS150E-Power Supply 1 unit DCM150F-DC motor 1 unit IP150H-Input Potentiometer 1 unit OP150O-Output Potentiometer 1 unit GT150X-Reduction Gear Tacho 1 unit, Voltmeter 1 unit 4. PROCUDURE 4.1. Characteristics of the Pre-Amplifier PA150C. 4.1.1. Set up as Fig 1. Fig 1: Circuit For Experiment 4.1 4.1.2. On the upper potentiometer of AU150B using voltmeter , set the output between terminal 2 and 0V to +1V. 4.1.3. To be able to obtain accurate reading we need a fine control and so we are going to use the lower potentiometer to give us fractions of the one volt that we have selected. 4.1.4. Connect terminal 6 of the lower potentiometer to the terminal 2 of the upper potentiometer. This mean that the scale position 1 to 10 give us input values in tenths of a volt. 4.1.5. We are now in the position to measure output values of the PA150C for different values of input to see how the amplifier behaves. 4.1.6. For each scale position on the lower potentiometer take reading with the volt meter of each of the PA150C outputs with respect to 0V as in Fig 1.0. After you have done this repeat for different outputs with the voltmeter across both outputs. 4.1.7. Record your result in Table 1.0 a 4.1.8. Now connect terminal 3 of the upper potentiometer to the -15 V supply and repeat your reading on Table 1.0 b 4.2. Motor Driven Closed-loop Position Control System. 4.2.1. Retain the unit of the first practical and also attach the OA150A, DCM150F and IP150H and also OP150K to the base plate bye means of the magnetic fixings. 4.2.2. Connect the servo amplifier connector plug into the power supply. 4.2.3. Connect the motor unit connector plug into the servo amplifier. 4.2.4. Set the circuit as Fig 2. Fig 2: Circuit for Experiment 4.2 4.2.5. This time we shall utilize the error signal output Vo of the operational amplifier to drive the output potentiometer via the pre-amplifier and motor. 4.2.6. The upper potentiometer on the AU150B can now be used as a gain control and should initially be set to zero before switching on the power. Adjust the PA150C “Zero Set” so the motor does not rotate. 4.2.7. Now set the IP150H to some arbitrary angle and increase the gain control setting. The output potentiometer cursor should rotate to an angle nearly equal to that of the input potentiometer cursor. 4.2.8. If the output cursor stops before arriving at the set position, one is faced with the fact that the system is tolerant to an error and the motor will not respond till the error exceeds a certain value. For the purpose of this experiment increase the gain so that this tolerance is overcome and you get the correct alignment. 4.2.9. Note the different results obtained in Table 2 for several settings of the input shaft angle. 5. RESULT Input Signal(+ve) V I volts V o (3) volts Pre-Amplifier output V o (4) volts V o (4-3) volts Table 1b: Output Data for Amplifier Input Signal(-ve) V I volts V o (3) volts Pre-Amplifier output V o (4) volts Table 1b: Output Data for Amplifier V o (4-3) volts Output cursor position in Degrees Required Actual Misalignment (%) Table 2: Out data for Control-loop Position control system 6. DICUSSION Exercise for 4.1 Characteristics of the Pre-Amplifier PA150C : 1. Plot graphs of the input volts against the output volts(3) and output volts(4) . (using graph paper) 2. Using the straight part of the curves find the gain of the Pre-Amplifier Gain [volt (3)]=_______ Gain [volt (4)]=_______ 3. State Why you should measure the gain on the straight part of the curve. ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ 4. Explain the reasons for the non-linear portions of the curves. ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ 7. CONCLUSION From the Experiment we observe that ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ _____________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ EXPERIMENT PART B: CLOSED-LOOP SPEED CONTROL SYSTEMS 1. OBJECTIVE 1.1. Know how a simple speed control system is constructed and operated. 1.2. Appreciate the Importance of a tachogenerator in a closed-loop speed control system. 2. INTRODUCTION 2.3.This assignment will illustrate the characteristics of the dc motor used in the modular servo and show how it can be controlled by the servo amplifier. This means that without any load you can set the DCM150F motor to run at a specified speed by determining the value of the input signal. With an open loop system, there can be reasonable speed control when operating without or with the fixed load but the system would be very unsuitable when the load was varying. 2.2 The next assignment is to find out the effect on speed by using LU150L magnetic brake as a load. The change in speed for a change in load will give us the regulation. The speed improvement can be made by closing the loop and using feedback. The actual speed will be compared with the required speed and this will produces an error signal to actuate the SA150D servo amplifier output so that the motor maintains a more constant speed. 3. COMPONENT AND EQUIPMENT 3.1. 3.2. 3.3. 3.4. 3.5. 3.6. 3.7. OA150A-Op Amp 1 unit AU150B-Attuenuator 1 unit SA150D-Servo Amplifier 1 unit PS150E-Power Supply 1 unit DCM150F-DC motor 1 unit GT150X-Reduction Gear Tacho 1 unit, Voltmeter 1 unit LU150L-Magnetic Brake 1 unit 4. PROCEDURE 4.1. Set up as Fig 3. 4.1.1. On the OA150A, set the ‘feedback selector’ switch to the 100K resistor. 4.1.2. Reset the reference voltage to zero and then gradually increase it so that you can take readings using voltmeter over the motor speed range up to approximately 2000 r/min for the reference, tachogenerator and error voltages. 4.1.3. Record your result in Table 3. 4.2. Set up as Fig 4. 4.2.1 On the OA150A, set the “feedback selector’ switch to ‘external feedback’. 4.2.2 On the LU150L, swing the magnets clear to use it as a load. 4.2.3 Initially set the gain to unity, that is position 10 of the upper potentiometer and adjust the reference voltage till the motor runs at 1000 r/min. 4.2.4 Then, take readings of the reference voltage (Vin), error voltage (Ve), and the tachogenerator voltage using the voltmeter over the range of brake positions 0-10. 4.2.5 Record your result in Table 4. 5. RESULT Reference Voltage Tachogenerator Voltage Error Voltage Speed r/min Table 3: Brake position Reference Voltage Tachogenerator Voltage Table 4: Error Voltage Speed r/min 6. DICUSSION 6.1 From the Table 3, plot the error voltage against speed, for the value recorded. 6.2 What will happen if the variable load is placed on the motor shaft and what sort of speed control system is? ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ 6.3 From the Table 4, plot your results in the form of graphs of error voltage against brake setting and speed against brake setting . 6.4 What do you think would happen if you continued to increase the motor load and conclusions do you draw from your observation? ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ 8. CONCLUSION ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________