Control Systems I
advertisement

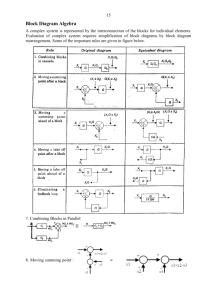
Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 Note 1 Introduction 1. Introduction Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 1 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 Control systems are everywhere around us, they regulate temperature in homes, stabilize aircraft and spacecraft, affect production of food by regulating the quality and purity of produce, are used in refineries, and so on. A system is generally made up of components which could be mechanical, electrical, hydraulic, and/or pneumatic. The function of the control system is to regulate the output of the system in accordance with some input signal. The controlled output may be position, velocity, acceleration, temperature, etc. The output is required to track and follow the input signal as closely as possible. The output is measured by using transducers and, fed back to the controller in order to correct deviations from the input signal. This is referred to as feedback and is an essential element of closed-loop control systems. When feedback is not used, we have an open-loop control system. In closed-loop control systems, feedback is used for calculating the error which is the difference between the input and output signals. The error signal is then filtered, amplified and applied to a power element within the system such as an electrical motor, hydraulic valve/ram) that acts upon the quantity to be controlled. Modern control is increasingly based on having an electrical signal as input and having transducers that produce electrical signals as a measure of the output. These are then fed into the controller which acts upon the system being controlled. Computers are increasingly used in control applications. 2. Definitions and Terminology Controlled Variable and Manipulated Variable: The controlled variable is the quantity or condition that is measured and controlled. The manipulated variable is the quantity or condition that is varied by the controller so as to affect the value of the controlled variable. Normally, the controlled variable is the output of the system. Control: Control means measuring the value of the controlled variable of the system and applying the manipulated variable to the system to correct or limit deviation of the measured value from a desired value. Plants: A plant may be a piece of equipment, perhaps just a set of machine parts functioning together, the purpose of which is to perform a particular operation. In this book, we shall call any physical object to be controlled (such as a mechanical device, a heating furnace, a chemical reactor, or a spacecraft) a plant. Processes: Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 2 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 Defined as natural, progressively continuing operation or development marked by a series of gradual changes that succeed one another in a relatively fixed way and lead toward a particular result or end; or an artifical or voluntary, progressively continuing operation that consists of a series of controlled actions or movements systematically directed toward a particular result or end. In this book we shall call any operation to be controlled a process. Examples are chemical, economic, and biological processes. Systems: A system is a combination of components that act together and perform a certain objective. A system is not limited to physical ones. The concept of the system can be applied to abstract, dynamic phenomena such as those encountered in economics. The word system should, therefore, be interpreted to imply physical, biological, economic, and the like, systems. Disturbances: A disturbance is a signal that tends to adversely affect the value of the output of a system. If a disturbance is generated within the system, it is called internal, while an external disturbance is generated outside the system and is an input. Feedback Control systems: A system that maintains a prescribed relationship between the output and the reference input by comparing them and using the difference as a means of control is called a feedback control system. An example would be a room-temperature control system. By measuring the actual room temperature and comparing it with the reference temperature (desired temperature), the thermostat turns the heating or cooling equipment on or off in such a way as to ensure that the room temperature remains at a comfortable level regardless of outside conditions. 3. Example An example of a closed-loop system is a temperature-control system in a room. For this system we wish to maintain, automatically, the temperature of the room at a desired value. To control any physical variable, which we usually call a signal, we must know the value of this variable, that is, we must measure this variable. We call the system for the measurement of a variable a sensor. In this system, the sensor is a thermistor. Thermistor is a device which has a resistance that varies with temperature. By measuring this resistance, we obtain a measure of the temperature. Plant Desired Temperature Warm Air Heating Room Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada Sub-System Compensator 3 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 We defined the plant of a control system as that part of the system to be controlled. It is assumed in this example that the temperature is increased by activating a gas furnace or a heating sub-system. Hence the plant input is the electrical signal that activates the furnace, and the plant output signal is the actual temperature of the living area. The plant is represented as shown in the above figure. In this example, the output of each of the systems is connected to the input of the other, to form the closed loop. In most closedloop control systems, it is necessary to connect a third system into the loop to obtain satisfactory characteristics for the total system. This additional system is called a compensator or a controller. The usual form of a single loop closed-loop control system is as follows: The system input is a reference signal; usually we want the system output to be equal to this input. In the temperature-control system, this input is the setting of the Desired Temperature. If we want to change the temperature, we change the system input. The system output is measured by the sensor, and this measured value is compared with (subtracted from) the input. This difference signal is called the error signal, or simply the error. If the output is equal to the input, this difference is zero, and no signal reaches the plant. Hence the plant output remains at its current value. If the error is not zero, in a properly designed system the error signal causes a response in the plant such that the magnitude of the error is reduced. The compensator is a filter for the error signal, since usually satisfactory operation does not occur if the error signal is applied directly to the plant. Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 4 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 4. Closed-Loop and Open-Loop Control Systems Open-loop control systems: Those systems in which the output has no effect on the control action are called openloop control systems. In other words, in an open-loop control system the output is neither measured nor fed back for comparison with the input. One practical example is a washing machine. Soaking, washing, and rinsing in the washer operate on a time basis. The machine does not measure the output signal, that is, the cleanliness of the clothes. In any open-loop control system the output is not compared with the reference input. Thus, to each reference input there corresponds a fixed operating condition; as a result, the accuracy of the system depends on calibration. In the presence of disturbances, an open-loop control system will not perform the desired task. Open-loop control can be used, in practice, only if the relationship between the input and output is known and if there are neither internal nor external disturbances. Clearly, such systems are not feedback control systems. Note that any control system that operates on a time basis is open loop. For instance, traffic control by means of signals operated on a time basis is another example of open-loop control. Closed-loop control systems: Feedback control systems are often referred to as closed-loop control systems. In practice, the terms feedback control and closed-loop control are used interchangeably. In a closed-loop control system the actuating error signal, which is the difference between the input signal and the feedback signal (which may be the output signal itself or a function of the output signal and its derivatives and/or integrals), is fed to the controller so as to reduce the error and bring the output of the system to a desired value. The term closed-loop control always implies the use of feedback control action in order to reduce system error. Closed-loop versus open-loop control systems An advantage of the closedloop control system is the fact that the use of feedback makes the system response relatively insensitive to external disturbances and internal variations in system parameters. It is thus possible to use relatively inaccurate and inexpensive components to obtain the accurate control of a given plant, whereas doing so is impossible in the open-loop case. From the point of view of stability, the open-loop control system is easier to build because system stability is not a major problem. On the other hand, stability is a major problem in the closed-loop control system, which may tend to overcorrect errors that can cause oscillations of constant or changing amplitude. 5. The Control Problems We may state the control problem as follows. A physical system or process is to be accurately controlled through closed-loop, or feedback, operation. An output variable, called the response, is adjusted as required by the error signal. This error signal is the Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 5 Lecture Notes of Control Systems I - ME 431/Analysis and Synthesis of Linear Control System - ME862 difference between the system response, as measured by a sensor, and the reference signal, which represents the desired system response. Generally a controller, or compensator, is required to filter the error signal in order that certain control criteria, or specifications, be satisfied. These criteria may involve, but not be limited to: 1. 2. 3. 4. Disturbance rejection Steady-state errors Transient response characteristics Sensitivity to parameter changes in the plant Solving in control problem generally involves Choosing sensors to measure the plant output 1. Choosing actuators to drive the plant 2. Developing the plant, actuator, and sensor equations (models) 3. Designing the controller based on the developed models and the control criteria 4. Evaluating the design analytically, by simulation, and finally, by testing the physical system 5. If the physical tests are unsatisfactory, iterating these steps The relationship of mathematical analysis and design to physical-system design procedures is depicted below. Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 6