LastName_EE402_Pre_Lab_6

Prescott, Arizona Campus
Department of Electrical and Computer Engineering
EE 402 Control Systems Laboratory
Fall Semester 2014
Lab Section 51: Thurs 9:10 – 11:50 am
Lab Section 50: Thurs 1:25 – 4:05 p.m. in KEC 122
Lab Instructor:
Dr. Stephen Bruder
Pre-Lab 06
Characterization of 2nd Order Systems - Time Domain
Date Experiment Performed:
Thursday, October 16, 2014
Date Report Submitted:
??, 2014
Group Members:
Student # 1 Name & Email
Student # 2 Name & Email
Instructor’s Comments:
Comment #1
Comment #2
Grade:
EE 402 Control Systems Lab Fall 2014
T
ABLE OF
C
ONTENTS PAGE
Order System: Determine the Time Constant ...................................... 6
Order System: Determine the Gain K
................................................ 6
Analyzing the 2 nd Order System: Determine the Gain K
........................................... 7
Analyzing the 2nd Order System: Closed-Loop Response .......................................... 8
L IST OF T ABLES PAGE
L IST OF F IGURES PAGE
Figure 2 Open loop response - 2 nd
order sys ................................................................................... 7
Names of Students in the Group Page
2
of 8
EE 402 Control Systems Lab Fall 2014
1.
INTRODUCTION
The purpose of this lab will be to experimentally determine the transfer function of a 2 nd
order system, namely, the DC servomotor. This transfer function will then be used in Lab 8, wherein a controller will be designed to modify the performance of the DC servomotor.
As previously seen, the 2 nd
order transfer function for a DC servomotor with the armature voltage as the input and motor speed as the output is (see Pre-Lab #4):
G ( ) speed
JL s m
2
( BL m
K
m
)
( BR m
K K m
)
s
( ) a
(1.1)
If we consider the motor’s armature inductance (
L m
) to be “small” (recall Hwk#4), we can approximate the transfer function as a 1 st
order (FO = First Order) system:
G ( ) speed
(
K
BL m
m
)
( BR m
K K m
)
( BL m
K
JR
/ ( m
BR
) / ( m
BR
m
K K
m
)
K K m
)
s
1
(1.2)
This can be rewritten as
G ( )
FO
K s
1
(1.3) where,
( BL m
JR m
) / ( BR m
K K m
) and K
K
/ ( BR m
K K m
) .
By absorbing the tachometer scale factor into the transfer function gain ( K
1
K K
Tach
), i.e.
, thinking of the system’s output as the tachometer voltage, the transfer function becomes
G ( )
FO
s
K
1
1
The response of this system to a step input of weight A ( i.e
., a
( )
/ ) is:
(1.4) c
FO
( )
AK
1
(1
e
t
) (1.5)
As previously seen, the time constant (
) can be determined by examining the step response
( c
FO
( ) ) at time values that are integer multiples of the time constant ( i.e
., t
, 2
,…). Also, the gain can be obtained from the steady state value, as
Names of Students in the Group Page
3
of 8
EE 402 Control Systems Lab Fall 2014
K
1
c ( t
FO
)
A
(1.6)
Similarly, we can obtain a 3 rd
order transfer function for a DC servomotor with the armature voltage as the input and motor position as the output (see Pre-Lab #4) as:
G position
G ( ) speed s
( ) a
(1.7)
Following the prior logic reduction of G position
( ) to a 2 nd order system yields (SO = Second
Order),
G ( )
SO
s
K
2 s
1
With the corresponding step response ( a
( )
/ ) of
(1.8) c
SO
( )
AK t
AK
2
(1
e
t
) (1.9) wherein we have absorbed the scaling of the Output Potentiometer (OP150K) into the K
2 term.
After t
4
, we have AK
2
(1
e
t
)
AK
2
, as the exponential term becomes negligible, so the overall output looks like a ramp of slope AK
2 riding on a DC value of AK
2
. This slope can be determined from a plot of the output ( c
SO
( ) ) in response to a step input ( a
( )
/ known magnitude. Knowing K
2
and
completely defines the second order model.
) of
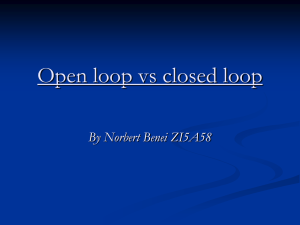
One way to determine the transfer function of a system ( i.e
., plant) is to measure the system’s
closed-loop response to a step input. Consider the unity feedback configuration shown in Figure
a
+
-
Plant s
K s
2
1
( )
Figure 1 A unity-gain closed-loop feedback configuration
Names of Students in the Group Page
4
of 8
EE 402 Control Systems Lab Fall 2014
The closed-loop transfer function is
s
2 1
K
2 s
K
2
Recalling the generic form of the step response for an underdamped 2 nd
order system as
(1.10) c ( ) A (1
CL
1
e
n t sin(
n t
)) (1.11) where, now
n
K
2
1
2 K
2
1
1
4 K
2
tan
1
2 4 K
2
K
2
1
A
weight of input step
The overshoot is only a function of the damping ratio and can be measured from the step response of the second order system as
% OS
100 e
/ 1
2 from which the damping ratio can be determined as:
ln(% OS / 100)
2 2 ln (% OS / 100)
(1.12)
(1.13)
The time to the first peak, T
P
, is
T
P
n
1
2
.
(1.14)
Names of Students in the Group Page
5
of 8
EE 402 Control Systems Lab Fall 2014
2.
PRE-LAB ASSIGNMENT
The DC servomotor can be modeled as a 1 st
order system if we consider the motor’s shaft speed as the output. Alternatively, if we consider the shaft angle as the output, the same servomotor now becomes a 2 nd
order system.
2.i.
Analyzing the 1
st
Order System: Determine the Time Constant
Assume that you measured the output of the tachometer for a first order open-loop system in order to determine the time constant of the system (refer to equation (1.5)). From the steadystate response of the system, you find AK
1
equal to 5.84 volts. By multiplying 5.84 by the value of 1
e
t
at t equal to integer multiples of
, you can calculate the expected voltage of the system at these times. By employing a measurement system ( e.g
., scope), we can observe the times at which the measured output ( i.e.
, c
FO
( ) ) achieved each of these voltages, thus, one can estimate
from each measurement. Assume that, having followed these directions you
Time,
2
3
4
t
Table 1 Results obtained from a first experiment
Calculated c
FO
( )
c
FO
( )(1
5.84
(volts)
(1
e
1 ) = 3.69 e
t
) t Measured
(sec)
0.25
5.84 (1
e
2
) = 5.05
5.84 (1
e
3
) = 5.55
5.84 (1
e
4
) = 5.73
0.51
0.84
1.09
Estimated
(sec)
Complete the table to find each estimate of
, then find the average
from the four estimates.
average
???
(sec)
2.ii.
Analyzing the 1
st
Order System: Determine the Gain K
1
Assume that the magnitude of the step input used in generating the results shown in Table 1
was 1.76 volts ( i.e., A = 1.76). Calculate K
1
using equation (1.6) and the data from Table 1.
K
1
?????
Names of Students in the Group Page
6
of 8
EE 402 Control Systems Lab Fall 2014
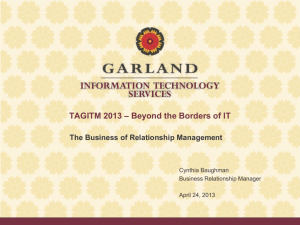
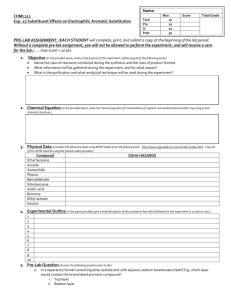
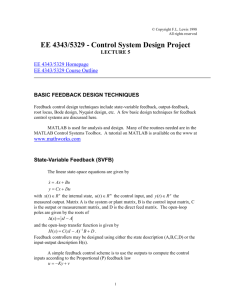
2.iii.
Analyzing the 2
nd
Order System: Determine the Gain K
2
Having obtained the time constant of the system, the next step is to determine the parameters of the 2 nd
order system, namely, K
2
, as described in equations (1.8) and (1.9). Figure 2 shows
the response obtained from the second order system when operated in an open-loop configuration, with an input of a weighted step ( i.e
., a
( )
/ ). Given that A , the weight of the step input is 0.188 volts, determine K
2
K
2
????
2
nd
Order Sys Open-Loop Step Response: E
a
(s)=A/s
12
10
8
G
SO
(s) =
K
2 s(=s+ 1)
6
4
2
0
0 0.5
1 1.5
Time (sec)
2
Figure 2 Open-loop response for the 2 nd
order sys
2.5
3
Names of Students in the Group Page
7
of 8
EE 402 Control Systems Lab Fall 2014
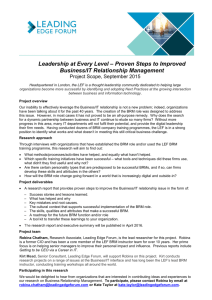
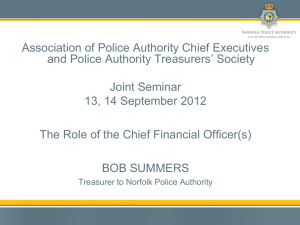
2.iv.
Analyzing the 2nd Order System: Closed-Loop Response
Assume that the second order system is now inserted into a unity feedback closed-loop
configuration, as shown in Figure 1. Figure 3 presents the unit step response of the closed-loop
system. Determine
and
n
????
and
n
????
Alternatively, determine
and
n
using the previously computed values of K
2
and
:
????
and
n
????
How do these two different methods of computing the damping ratio and natural frequency compare?
2 nd
Order Sys Closed Loop Step Response: E a
(s)=1/s
1.5
1
0.5
0
0 0.5
1 1.5
Time (sec)
2
Figure 3 Closed-loop response for the 2 nd
order sys.
2.5
Names of Students in the Group Page
8
of 8
3