signal_coord.doc - Lyle School of Engineering
advertisement

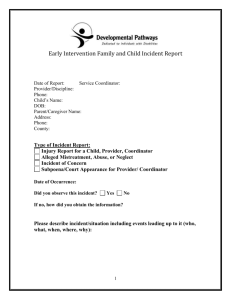
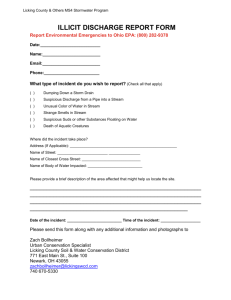
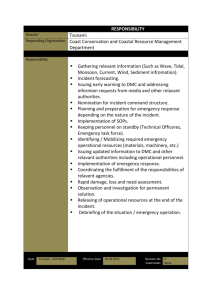
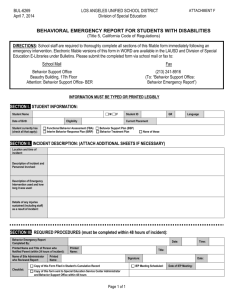
Real-Time Dynamic Traffic Assignment and Path-Based Signal Coordination: Application to Network Traffic Management Khaled F. Abdelghany Kfaissal@mail.utexas.edu Didier M. Valdes Dvaldes@mail.utexas.edu Akmal S. Abdelfatah Akmal@mail.utexas.edu Hani S. Mahmassani Masmah@mail.utexas.edu Department of Civil Engineering ECJ 6.2 The University of Texas at Austin Austin, Texas 78712 Phone: (512) 475-6361 Fax: (512) 475-8744 July 1998 Prepared for presentation at the 78th Annual Meeting of the Transportation Research Board, January 1999, Washington D.C. and publication in Transportation Research Board Abdelgany, Valdes, Abdelfatah and Mahmassani 2 REAL-TIME DYNAMIC TRAFFIC ASSIGNMENT AND PATH-BASED SIGNAL COORDINATION: APPLICATION TO NETWORK TRAFFIC MANAGEMENT INTRODUCTION Real-Time Dynamic Traffic Assignment (RT-DTA) is a core methodology for the operation of Intelligent Transportation Systems (ITS) technology in the management of traffic networks to alleviate both recurrent and non-recurrent congestion. Used in conjunction with incident detection capabilities, the RT-DTA system is intended to predict the traffic flow pattern, and provide decision support capabilities in the generation of information to users (for route diversion selection) and the evaluation of alternative traffic controls. Efficient use of the available capacity in the highway corridor network through integrated operation of the freeway and the surrounding surface streets is a major objective of incident management schemes. In response to real-time information and route diversion advice via Variable Message Signs (VMS) upstream of the incident as well as various onboard devices, freeway users may divert to the surface street network. To absorb this diverted traffic, the capacity of the surface street network should be optimized by modifying the traffic signal control to serve the new flow pattern. Prototypical ATMS schemes envision signal coordination along the freeway frontage roads (if available) or along parallel arterials to provide a through band of progression for through traffic along these facilities. However, diversion traffic may not necessarily follow a through path along these major parallel facilities. Instead, diversion paths may involve turning movements at key junctions. Incident management, and coordinated network control can be considerably more effective if they recognized these flow patterns and favored dominant movements through the network, e.g. by providing coordination to achieve a through band for particular paths followed by these dominant streams. We refer to such an approach as path-based signal coordination. One of the difficulties of providing such path-based coordination is to identify the particular path along which coordination should be provided, especially in dynamic environments such as non-recurrent congestion spots. Recent development in dynamic assignment, especially the RT-DTA capabilities mentioned earlier, make it possible to extract such paths from the solution, i.e. from the predicted flow patterns in the network. The objectives of this paper are two-fold: (1) to illustrate the benefits of coordinated network operation under incident conditions, with particular emphasis on pathbased signal coordination; and (2) to describe procedures for identifying paths along which coordination would be beneficial, given RT-DTA capabilities, and for implementing such coordination schemes. Although traffic signal coordination is a topic that has been extensively covered in the literature, it does not appear that path-based coordination has been described and tested. Nevertheless, its essence lies in some of the early seminal work of Gazis [1, 2] on Abdelgany, Valdes, Abdelfatah and Mahmassani 3 signalized network control, which discussed conceptually the potential of combining routing with signal control for efficient use of a traffic network. One may view this approach as a natural step from straightforward arterial progression towards the more complex problem of network coordination in the case where dominant flow patterns may be identified. This paper first describes the RT-DTA system used in this paper. It also introduces the notion of path-based coordination along paths that combine consecutive through and turning movements. A set of numerical experiments on an actual network are designed to evaluate the network performance under path-based coordination compared to the donothing base case and to arterial-based coordination, for both pretimed and vehicle actuated signal control. The experiments also illustrate the role of real-time information through VMS in incident network management, and the decision-support function of the RT-DTA in this process. BACKGROUND AND GENERAL APPROACH The real-time dynamic traffic assignment (RT-DTA) capabilities illustrated in this paper are provided by the DYNASMART-X simulation-assignment system. Its structure, depicted in Figure 1, includes the following modules: O/D estimation, O/D prediction, realtime network state simulation, consistency checking, updating and resetting functions, and network state prediction. These modules are integrated through a flexible distributed architecture, using CORBA (Common Object Request Broker Architecture) standards, for real-time operation in a rolling horizon framework with multiple asynchronous horizons for the various modules. Activation of these modules may be time-based and/or eventbased. Time-based activation takes place according to the module-specific cycles, while event-based activation depends on the occurrence of particular situations (e.g. pre-defined threshold values for certain network state variables). The OD estimation and prediction module is first activated to predict the time dependent OD pattern for the next (OD prediction) stage using OD historical information and input from the surveillance system and/or vehicle probes. Simultaneously, the real time simulator supported by a series of consistency checking and updating functions, estimates current network traffic conditions. The supporting consistency checking functions compare measured values of selected state variables in the actual system to the corresponding values in the simulator, and update the internal representation within the simulator to ensure consistency with actual conditions. At the start of each state prediction stage, the predictor reads the current network conditions from the real time simulator and uses the predicted time-varying O/D values to predict network conditions over the next stage. New predictions may be computed in real time when a major disruption, such as an incident, is detected. To further support incident management decisions, as the current control plan may no longer be suitable for the new flow patterns, several control plans may be suggested and evaluated and the selected plan is directly forwarded to the signal controllers in the field. An overview of the principal components of the RT-DTA system and more details can be found in Mahmassani et al. [3, 4]. Abdelgany, Valdes, Abdelfatah and Mahmassani 4 The interaction between signal settings and the associated flow patterns complicates the optimal design of the signal settings. The degree of this interaction depends on the availability of information to users. The RT-DTA is capable of predicting the future flows and associated network performance that may result under proposed new signal settings. However, if these signals were optimized for the previously prevailing flow pattern, they may no longer be optimal for the new flow pattern when information is readily available to users. Several authors have sought procedures to determine signal settings that are consistent with a long run (typical time-invariant) equilibrium flow pattern in the network. Allsop and Charlesworth [5] presented an iterative optimization reassignment procedure which iteratively sets the signal timing at each intersection to minimize delay, holding flow constant. Flows are then adjusted to new user equilibrium and the process is repeated until flows are at equilibrium and the signal timing is optimal. Smith [6, 7] pointed out that this method does not guarantee convergence, not even to a local optimum. Sheffi and Powell [8] reformulated the problem to find signal timings that minimize the total travel time spent in the network, subject to the constraint that the flow pattern satisfies static user equilibrium conditions. Abdelfatah and Mahmassani [9] have presented an approach to solve for a time-varying system optimal path assignment jointly with optimal signal settings. However, the approach assumes a priori knowledge of OD trips over a long horizon, and is computationally demanding, limiting its use to off-line applications. For real-time incident management purposes, longer-term interactions are not of concern, and the information provided through the VMS gives rise to dominant flows and movements through the network. The approach followed here therefore relies on efficient heuristic procedures aimed at producing good, though not necessarily optimal, settings and signal coordination schemes. These procedures are patterned after current practice for obtaining traffic signal coordination, with the main difference being in the application to paths obtained from the RT-DTA instead of simply following through movements on arterials. The effectiveness of this approach depends on the appropriate determination of the dominant paths along which coordination can be provided. The dominant paths are defined as those paths that are used by the largest number of travelers in the network over the period of interest. These paths may consist of a combination of straight portions and turning movements. As mentioned earlier, DYNASMART-X provides prediction capabilities for each stage in the operation horizon. This prediction includes path trajectories between the origin and the destination for all the vehicles in the network; however, a RT-DTA that provides aggregated time-varying path flows between origins and destinations would be sufficient. The number of vehicles that use each path over the duration of interest provides the basis for ranking paths in order to determine the dominant ones. The experiments in this paper are designed to compare the network performance under different coordination schemes for pretimed and vehicle-actuated signal control. For pretimed signal control, the procedure developed by Abdelfatah and Mahmassani [9] is first used to calculate the traffic signal settings for the isolated intersections using the Abdelgany, Valdes, Abdelfatah and Mahmassani 5 predicted traffic flows. In their procedure, the cycle length and the green splits for each intersection were calculated using Webester’s formula [10]. The average traffic volumes were obtained by aggregating the time varying flows that result from DYNASMART-X prediction. The cycle length of the whole coordinated corridor (path) is selected to be the maximum cycle length among all the intersections along this corridor. Following Newell’s suggestion [11], for any intersection that has an optimal cycle length close to half the path’s cycle length, the cycle length is set to be half of the common cycle length. The average link travel times associated with the predicted flows along the coordinated corridors (paths) are taken as the signal offset values for the coordinated signals. For the vehicle actuated control case, the continuous green band is obtained by increasing the maximum green for the coordinated phases along the corridor. Sensitivity analysis is used to select the best practical maximum green value; overall network performance is compared for extensions of 10 sec, 20 sec and 30 sec for this purpose. The same extension value is used for all the intersections along the coordinated corridor. In both cases, and for comparative purposes, the effect of vehicle reassignment is controlled in these experiments by fixing the vehicle paths before and after changing the signal design. EXPERIMENTAL DESIGN Figure 2 depicts the test network used in the current study which represents the south central corridor in the Fort Worth area. The network consists of a freeway (I-35W) surrounded by a street network with a total of 178 nodes and 441 links. The demand pattern is set to represent a peak period flow in which about 17,000 vehicles are generated over 35 minutes and simulated for 100 minutes. For the signalized intersections (61 intersections), the experiments are designed to simulate two different methods of control: pretimed fixed signal control and vehicle actuated signal control. In both cases, the unsignalized intersections are set as follows: no control (62 intersections), yield sign control (24 intersections) and stop sign control (31 intersections). A series of variable message signs were placed along the freeway at a sufficient distance upstream of the exit ramps. These signs are capable of carrying messages to divert the traffic to the surface street network in case of a downstream incident. Four experimental factors are considered in the design of these experiments. Two of these factors pertain to signal control: (1) pretimed vs. vehicle-actuated control, and (2) coordination scheme, for which three different levels are considered: do-nothing base case (with no coordination), arterial based coordination and path-based coordination. The third experimental factor also consist of two levels: (1) no incident vs. (2) presence of incident along the freeway. Specifically, as shown in Figure 2, the incident considered has 75% severity (i.e. it blocks 75% of available capacity), starts at minute 20 and ends by minute 40 of the simulation time on link 41-37 of the freeway. The fourth experimental factor consists of the provision of real-time information through VMS; two levels are considered: (1) no VMS, with only historical information regarding the best path at the start of the trip available to drivers; vs. (2) VMS activated to provide drivers with information upstream of the incident. The second level of this factor is Abdelgany, Valdes, Abdelfatah and Mahmassani 6 conditioned upon the presence of an incident; hence it is defined only in conjunction with level two of the incident presence experimental factor. The two variable message signs upstream the incident are located on the freeway to switch the vehicles to the street network using the two ramps 52-51 and 48-47. In all these experiments, users are assumed to have only historical information about the best current path at the start of their trips. They are also assumed to fully comply with the information supplied by the VMS’s (though this assumption can be readily relaxed to consider various compliance ratios, with no loss of generality). For ease of presentation, three scenarios are defined. The first scenario does not involve an incident along the freeway, and hence the VMS are not activated for diversion. The second and the third scenarios correspond to the above incident along the freeway link. In the third scenario, two variable message signs are activated upstream of the incident to divert the traffic to the surface street network, while no VMS is activated in the second scenario. For arterial-based coordination, the arterials selected for consideration arise naturally from the network configuration. Figure 3 shows the three coordinated arterials used in these experiments, namely the frontage road and one arterial on each side of the freeway. This set of arterials is fixed for all the arterial-based coordination experiments. For path-based coordination, a set of paths with nearly the same number of intersections (as those along the selected arterials) is obtained by investigating the traffic flow pattern obtained from the prediction module as described in the previous section. The number of signalized intersections along the coordinated paths and the coordinated arterials is taken to be nearly the same to avoid the advantage of coordinating more intersections along one of the two schemes while comparing their performance. The paths to be coordinated are not necessarily fixed in all the experiments, again, to reflect the flow distribution in the network associated with the method of control (e.g. pretimed or vehicle actuated). EXPERIMENT RESULTS Table 1 summarizes the results of the experiments conducted under pretimed signal control. The table shows the network performance under the three different coordination schemes: do-nothing, arterial-based coordination, path-based coordination. The results are given for the three different scenarios described earlier: (1) no incident, (2) incident, (3) incident with VMS. In scenarios 1 and 2, no obvious dominant paths are found. For this reason, the flow pattern obtained from the scenario 3 in which the VMS's are activated is used to determine the dominant paths for the other two scenarios, as shown in Figure 4. Several results are illustrated in Table 1. Under the different scenarios, the pathbased coordination improved the overall network performance in terms of the average overall travel time and the average stopped time, with an estimated improvement of 11.36% in the average travel time and 13.68% in the average stopped time under the noincident scenario. Under the same scenario, the arterial-based coordination scheme actually results in an increase in the average travel time by 5.42%, and in the average stopped time Abdelgany, Valdes, Abdelfatah and Mahmassani 7 by 7.7% compared to the no-coordination base case. Although the arterial-based coordination may reduce the travel time and the number of stops for the traffic moving along the coordinated arterials, as shown in many previous studies, the results of the present experiments suggest that arterial-based coordination may have an adverse effect at the network level. Because it explicitly considers the flow patterns in the network, pathbased coordination outperforms the arterial-based coordination, which can be viewed as a subset of the possible path-based solutions. Coordination along an arterial may reduce the delay along that arterial only, while at the same time increasing the delay for the intersecting arterials which may also have high traffic flows. In addition, path-based coordination allows the flexibility of coordinating segments of the arterials that experience the highest traffic flows. It can be noted that, under the scenarios in which the VMS's were not activated, the average travel distance is constant. This ensures that all drivers use their historical information about the best path and use these paths regardless of the incident. When the VMS's are activated, a change in the average travel distance is observed. Relative to the other schemes, a very slight increase in the average travel distance is noted under the path-based coordination scheme. Clearly, this increase is not meaningful compared to the associated reduction in the average travel time and the average stopped time. In addition, the results in Table 1 show the adverse effect of the incident on the network performance, reflected in increases of about 4 to 5 minutes in the average travel time and the average stopped time. The variable message signs redistributed the traffic in the surface street network. The coordination schemes are intended to increase the capacity of the street network to accommodate this diverted traffic. Of course, the better the design of the coordination scheme is, the greater the capacity of the network, and the less the effect of the incident on overall network performance will be. The results in Table 1 reveal that the average travel time (26.48 min) and the average stopped time (17.51 min) for the path-based coordination scheme under scenario three (which activates the VMS's) are even (slighter) better than the average travel time (26.71 min) and the average stopped time (17.99 min) under the no-incident arterial-based coordination scenario. The results of a similar set of experiments conducted under vehicle-actuated signal control are summarized in Table 2. Similarly to the fixed control case, the third scenario is used to determine the dominant paths for the other two scenarios. However, these paths are different from those of the previous set, because of the change in signal control from pretimed to vehicle-actuated; the new set of dominant paths are shown in Figure 5. As described earlier, sensitivity analysis is used to determine the best practical maximum green value. The results for 10 sec, 20 sec and 30 sec green extensions are given in Table 2. This extension was added to the maximum green used in the do nothing scenario to allow the natural emergence of a continuous green band for the traffic along the coordinated corridor. One can first note the reduction in the average travel time and the average stopped time under the vehicle actuation scheme compared to the pretimed fixed control. An impressive average reduction of about 25% in the travel time and the stopped time Abdelgany, Valdes, Abdelfatah and Mahmassani 8 underscores the importance of traffic responsive method of control in improving overall network performance. The path-based coordination scheme in the traffic responsive control environment appears to exhibit similar relative performance as in the case of pretimed signal control. Under the no-incident scenario, and for green extension of 10 seconds, arterial-based coordination improves the average travel time and the average stopped time by 2.40% and 4.93%, respectively. This improvement is nearly doubled under the pathbased coordination to 5.54% for the average travel time, and 8.11% for the average stopped time. Under the incident scenarios, arterial-based coordination again failed to significantly improve overall network performance. The adverse effect in some cases is notable. An increase of about 5.42% in the average travel time and 6.58% in the average stopped time were estimated when arterial-based coordination was used with the incident scenario. Under the same scenario, the path-based coordination actually improved the average travel time and the average stopped time by 3.41% and 4.06%, respectively. Under vehicleactuated control, as in the pretimed control case, the change in the average travel distance associated with the activated VMS's is negligible relative to the associated improvement in the average travel time and the average stopped time. CONCLUSIONS AND SUGGESTIONS FOR FURTHER RESEARCH This paper introduces and illustrates the notion of path-based coordination in transportation networks as one example of integrating signal control with network traffic assignment, which is one of the benefits of using RT-DTA systems for incident management. The use of a RT-DTA system such as DYNASMART-X allows the prediction of the traffic flow pattern and identification of the dominant paths in the network. The signalized intersections along these paths, which may consist of combinations of straight sections and turning movements are coordinated, so as to increase the capacity of the freeway and the surface street system to efficiently absorb diverted traffic from the freeway. The path-based coordination scheme is shown to outperform arterial-based in the cases of both pretimed fixed control and vehicle-actuated signal control. A significant reduction in the network average travel time under the path-based coordination scheme is observed compared to the other schemes. This reduction illustrates the potential of leveraging information about path flow patterns in the network as predicted by a real time dynamic traffic assignment capabilities, to increase the effectiveness of the traffic signal control in the network, which is particularly meaningful under incident conditions. The work in this paper shows a simple example of an efficient integration between the freeway and surrounding street network to alleviate the effect of severe incident congestion. Of course, the results in this paper should be viewed only as illustrative of the potential of RT-DTA systems in designing path-based coordination. One evident limitation of path-based coordination is the presence of conflicting dominant flows, or the lack of dominant flows. However, the realism of these experiments is enhanced by the consideration of an actual network with corresponding OD flow patterns estimated from actual data. Similar results have also been obtained in other test networks. This example can be extended to include other control measures such as ramp metering as well as the Abdelgany, Valdes, Abdelfatah and Mahmassani 9 advanced information dissemination strategies. In addition, the environmental impact of diverting freeway traffic to the surface street network might be considered in assessing such incident management schemes. ACKNOWLEDGEMENTS The work presented in this paper is based on research partially supported by the U.S. Federal Highway Administration and the Texas department of Transportation. The work has also benefited of the cumulative development effort of many former and current students. The Authors are particularly grateful to Yasser E. Hawas and Yi-Chang Chiu for their considerable effort in the development of the Real-Time Dynamic Traffic Assignment System (DYNASMART-X) which used to conduct the experiments presented in this paper, as well as their contribution to the overall research effort. The Authors have also benefited from the insightful comments of Dr. Henry Lieu of FHWA and Drs. Shaw-Pin Miaou and Michael Summers of the Oak Ridge National Laboratory. Of course, the authors are solely responsible for the findings and views expressed in this paper. REFERENCES 1. Gazis, D.C., Traffic Science. John Wiley and Sons., Inc., New York, 1974. 2. Gazis, D.C. and Potts, R. B. Route Control at Critical Intersections. Proceedings of the Australian Road Research Board 3, part 1, 1966, pp. 354-363. 3. Hawas, Y., Mahmassani, H.S., Taylor, R., Ziliaskopoulos, A., Ghang, G-L., and Peeta, S., Development of DYNASMART-X Software for Real-Time Dynamic Traffic Assignment, Technical Report ST067-85-Task E, Center for Transportation Research, The University of Texas at Austin, 1997. 4. Hani S. Mahmassani and Yaser E. Hawas. A Hierarchical Distributed Computational Architecture for A Centralized Real-time Dynamic Traffic assignment. Proceeding of TRISTAN III Conference, San Juan, Puerto Rico, June 1998. 5. Allsop, R. E. & Charlesworth, J. A., Traffic in Signal Timings Including Different Routings. Traffic Engineering and Control, Vol.18, No 5, 1977, pp. 262-264. 6. Smith, M. J., Properties of Traffic Control Policy Which Ensure the Existence of a Traffic Equilibrium consistent with the policy. Transportation Research, Vol. 15B, No. 6, 1981, pp. 453-462. 7. Smith, M. J. & Ghali M., The Dynamics of Traffic Assignment and Control: A Theoretical Study. Transportation Research, Vol. 24B, No. 6 , 1990, pp. 409-422. 8. Sheffi, Y. & Powell, W. B., Optimal Signal Settings over Transportation Networks. Journal of Transportation Engineering of ASCE, Vol. 109, No. 6., 1983, pp. 824-839. 9. Abdelfatah, A.S., Mahmassani, H.S., System Optimal Time-Dependent Path Assignment and Signal Timing in Traffic Networks. Paper presented at the 77th annual meeting of the TRB. 10. F. V. Webster and B. M. Cobbe, Traffic Signals, Road Research Labratory, Technical Paper No. 56, Her Majesty’s stationary office, London, 1956. 11. Gordon F. Newell. Theory of Highway Traffic Signals. Institute of Transportation Studies-University of California at Berkeley, Course Notes 1989. Abdelgany, Valdes, Abdelfatah and Mahmassani 10 LIST OF TABLES TABLE 1: RESULTS OF THE PRETIMED SIGNAL CONTROL EXPERIMENTS. TABLE 2: RESULTS OF THE VEHICLE ACTUATED SIGNAL CONTROL EXPERIMENTS. Abdelgany, Valdes, Abdelfatah and Mahmassani 11 LIST OF FIGURES FIGURE 1: STRUCTURE OF THE DYNASMART-X REAL-TIME DYNAMIC TRAFFIC ASSIGNMENT FIGURE 2: THE TEST NETWORK. FIGURE 3: THE COORDINATED ARTERIALS. FIGURE 4: THE COORDINATED PATHS FOR THE PRETIMED FIXED CONTROL CASE. FIGURE 5: THE COORDINATED PATHS FOR THE VEHICLE ACTUATION CONTROL CASE. Abdelgany, Valdes, Abdelfatah and Mahmassani 12 O/D Estimation & Prediction Surveillance Data Consistency Checking Control Strategy DYNASMART SIMULATOR Signal Plan Evaluation of ATMS/ATIS Future Network State Prediction Routing Information Figure 1: Structure of the DYNASMART-X Real-Time Dynamic Traffic Assignment System. Abdelgany, Valdes, Abdelfatah and Mahmassani 13 100 156 116 118 67 130 81 1 2 19 68 131 82 121 69 80 83 70 3 122 4 85 89 97 151 103 91 144 96 104 26 5 6 27 29 65 66 140 145 7 8 92 146 152 99 31 33 141 147 153 155 90 176 30 32 34 35 37 36 86 102 24 28 71 159 123 72 124 73 40 125 74 11 158 160 161 25 84 132 101 22 23 120 157 98 21 20 119 139 39 105 106 163 164 107 38 10 9 162 165 108 93 177 178 142 148 154 109 94 149 95 110 166 41 167 42 126 75 175 76 127 77 133 12 43 44 45 47 46 13 134 48 14 168 143 150 49 51 52 50 135 137 111 53 54 128 78 87 88 15 16 171 113 114 112 55 169 56 136 129 79 138 59 57 17 172 58 60 61 18 63 62 173 174 64 115 117 Figure 2: The test network. 170 Abdelgany, Valdes, Abdelfatah and Mahmassani 14 100 156 116 118 67 130 81 1 2 19 68 131 82 121 69 80 83 70 3 122 4 85 102 89 97 151 103 91 144 96 104 24 26 5 6 27 29 65 66 140 145 7 8 92 146 152 99 31 33 141 147 153 155 90 176 28 71 159 30 32 34 35 37 36 72 86 124 73 40 125 74 11 160 161 106 39 163 164 38 10 9 162 105 107 123 158 25 84 132 101 22 23 120 157 98 21 20 119 139 165 108 93 177 178 142 148 154 109 94 149 95 110 166 41 167 42 126 75 175 76 127 77 133 12 43 44 45 47 46 13 134 48 14 168 143 150 49 51 52 50 135 137 111 53 54 128 78 87 88 15 16 171 113 114 112 55 169 56 136 129 79 138 59 57 17 172 58 60 61 18 63 62 173 174 64 115 117 Figure 3: The coordinated arterials. 170 Abdelgany, Valdes, Abdelfatah and Mahmassani 15 100 156 116 118 67 130 81 1 2 19 119 68 131 82 121 69 80 83 70 20 22 3 4 122 89 85 159 102 24 26 5 6 151 103 90 91 144 96 104 27 29 65 66 140 145 7 8 92 146 152 99 31 33 141 147 153 155 176 123 72 86 30 32 34 35 37 73 161 162 106 163 164 38 10 9 39 124 160 105 107 36 158 25 28 71 101 97 84 132 157 98 21 23 120 139 165 108 93 177 178 142 148 154 109 94 149 95 110 166 41 167 40 42 125 126 175 127 11 74 75 133 12 43 44 45 76 46 77 13 134 47 48 14 168 143 150 49 51 52 50 135 137 111 53 54 128 78 87 88 15 16 171 113 114 112 55 169 56 136 129 79 138 59 57 17 172 58 60 61 63 62 170 18 173 174 64 115 117 Figure 4: The coordinated paths for the pretimed fixed control case. Abdelgany, Valdes, Abdelfatah and Mahmassani 16 100 156 116 118 67 130 81 1 2 19 119 68 131 82 121 69 80 83 70 20 22 3 4 122 89 85 159 102 24 26 5 6 151 103 90 91 144 96 104 27 29 65 66 140 145 7 8 92 146 152 99 31 33 141 147 153 155 176 123 72 124 73 86 160 161 30 32 34 35 37 106 39 163 164 38 10 9 162 105 107 36 158 25 28 71 101 97 84 132 157 98 21 23 120 139 165 108 93 177 178 142 148 154 109 94 149 95 110 166 41 167 40 42 125 126 11 74 75 175 76 127 77 133 12 43 44 45 47 46 13 134 48 14 168 143 150 49 51 52 50 135 137 111 53 54 128 78 87 88 15 16 171 113 114 112 55 169 56 136 129 79 138 59 57 17 172 58 60 61 18 63 62 170 173 174 64 115 117 Figure 5: The coordinated paths for the vehicle actuation control case. Abdelgany, Valdes, Abdelfatah and Mahmassani 17 Table 1: Results of the Pretimed Signal Control Experiments. Case Scenario Coordination Scheme No Incident No-Coord. Arterial. Coord. Path Coord No-Coord. Arterial Coord. Path Coord No-Coord. Arterial Coord. Path Coord Incident Incident + VMS Average Overall Travel Time (Min) 25.34 26.71 % Improvement -5.42% 22.46 29.37 29.90 11.36% 27.92 27.06 26.72 4.94% 26.48 Average Stopped Time (Min) 16.71 17.99 % Improvement -7.7% Average Trip Distance (Miles) 4.09 4.09 14.42 20.42 20.84 13.68% 6.10% 1.36% 19.18 18.27 17.91 1.97% 4.09 4.11 4.11 2.14% 17.51 4.15% 4.13 -1.81% -2.07% 4.09 4.09 4.09 Abdelgany, Valdes, Abdelfatah and Mahmassani 18 Table 2: Results of the Vehicle Actuated Signal Control Experiments. Case Scenario Coordination Scheme No Incident No-Coord. Arterial Coord. +10 +20 +30 Path Coord. +10 +20 +30 No-Coord. Arterial Coord. +10 +20 +30 Path Coord. +10 +20 +30 No-Coord. Arterial Coord. +10 +20 +30 Path Coord. +10 +20 +30 Incident Incident + VMS Average Overall Travel Time (Min) 20.22 19.74 20.09 19.81 19.10 20.08 20.24 24.91 26.26 25.14 24.83 24.06 24.33 24.29 22.61 22.66 22.83 22.94 22.59 21.29 21.72 % Improvement 2.40% 0.64% 2.01% 5.54% 0.68% -0.08% -5.42% -0.90% 0.33% 3.41% 2.33% 2.51% -0.22% -0.98% -1.46% 0.08% 5.83% 3.92% Average Stopped Time (Min) 12.31 11.70 11.99 11.74 11.31 12.20 12.32 16.13 17.19 16.27 15.96 15.48 15.74 15.64 13.99 13.94 14.16 14.26 13.99 12.95 13.25 % Improvement 4.99% 2.53% 4.63% 8.11% 0.083% -0.14% -6.58% -0.84% 1.07% 4.06% 2.45% 3.04% 0.35% -1.23% -1.95% -0.04% 7.37% 5.27% Average Trip Distance (Miles) 4.09 4.09 4.09 4.09 4.09 4.09 4.09 4.09 4.09 4.09 4.09 4.09 4.09 4.09 4.08 4.11 4.07 4.11 4.11 4.07 4.09