Exact multiplicity of positive solutions for a class of singular
advertisement

Exact multiplicity of positive solutions for a class of singular
semilinear equations
Peter L. Simon
Institute of Mathematics,
Eötvös Loránd University Budapest, Hungary
Abstract
The exact multiplicity of positive solutions of the singular semilinear equation ∆u+λf (u) = 0
with Dirichlet boundary condition is studied. The nonlinearity f that tends to infinity at zero,
it is the linear combination of the functions u−α and up with α, p > 0. The number λ is a
positive parameter. The goal is to determine all possible bifurcation diagrams that can occur
for different values of α and p. These kind of equations have been widely studied on general
domains, here we focus on the exact number of radial solutions on balls that can be investigated
by the shooting method.
It is shown how the so-called time-map can be introduced by the shooting method, and its
properties determining the exact number of the positive solutions of the boundary value problem
are studied. The exact multiplicity of positive solutions is given in the one-dimensional case,
for which all the possible bifurcation diagrams are listed. In the higher dimensional case the
bifurcation diagrams are not known for all values of α and p, in this case some open problems
are collected.
1
Introduction
We investigate the exact number of positive solutions of the singular semilinear boundary value
problem
∆u + λf (u) = 0
u|∂Ω = 0
(1)
(2)
where Ω ⊂ Rn is a bounded domain (in most of the cases studied here, a ball), λ is a positive
parameter, f (u) = au−α + bup , α, p > 0. Our aim is to determine the bifurcation diagram, that is to
determine the number of positive solutions as λ is varied.
This problem was investigated in many papers for different values of a and b. Here we give a
short survey of the known results for the singular case (i.e. a 6= 0) and show the cases when the
exact multiplicity of the solutions is not known.
Before going into the details we emphasize that most of the authors consider the case of general
domains and use strong tools (e.g. topological or variational methods). However, using these methods
1
mainly the existence of the solution can be proved, the exact multiplicity can hardly be given. We
will show that even in the one-dimensional case (when Ω is an interval) there are cases (e.g. when
a < 0, b > 0) when the exact multiplicity of positive solutions is not known. The main novelty of
this paper is the full classification of the bifurcation diagrams in the one-dimensional case. We will
also determine the bifurcation diagrams in the higher dimensional case for some values of a and b,
and we will list all the open cases when the bifurcation diagram is not known.
We remark that the equation ∆u + λ(au−α + bup ) = 0 can be transformed to the same form with
a, b = ±1 by using a simple co-ordinate transformation. (The sign of a and b cannot be changed
since λ > 0.) Thus we will consider the following three cases:
• f (u) = u−α + up ,
• f (u) = up − u−α ,
• f (u) = u−α − up .
(The last possible case f (u) = −u−α − up is trivial, since in this case f (u) < 0, hence there is no
positive solution.)
Let us now summarize the known results corresponding to the above three cases. We remark
that in some of the papers cited below the parameter λ multiplies only the term u−α or the the term
up and not both together. However, these cases can be reduced to λf (u) by a simple co-ordinate
change, hence only the case of equation (1) will be considered. Solution can exist only for α < 1, see
e.g. [4], hence it will be always assumed.
For the nonlinearity f (u) = up + u−α on a general domain Ω ⊂ Rn it is shown in [7, 13] that there
is a unique solution for 0 < p < 1 and for all λ > 0. For p ≥ 1 in [2] it is proved that there exists λ∗ ,
such that if λ < λ∗ , then there is at least one solution and if λ > λ∗ , then there is no solution. In
the case when Ω is a ball and 1 ≤ p < (n + 2)/(n − 2) it is shown in [6] that if λ < λ∗ , then there
are at least two solutions (for n = 1 and p ≥ 1 there are exactly two solutions).
The nonlinearity f (u) = up − u−α was studied on a general domain Ω ⊂ Rn in [4] for p = 0 and
in [14] for 0 < p < 1. They proved that there exist λ∗ , such that there is no solution, if λ < λ∗ , and
there is at least one solution if λ > λ∗ . Some of these results were generalized to the case of space
dependent coefficients [12]. The one-dimensional case for p = 0 was studied in [3]. It was shown
there that there may be two solutions for some values of λ. The exact multiplicity for this case was
determined in [8]. It was proved there that for 1/2 ≤ α < 1 there exists λ∗ , such that if λ < λ∗ ,
then there is no solution, and if λ > λ∗ , then there is one solution. Moreover, for 0 < α < 1/2 there
exists λ0 < λ∗ , such that if λ < λ0 , then there is no solution, if λ0 < λ < λ∗ , then there are two
solutions and if λ > λ∗ , then there is one solution. Similar result will be proved in this paper for any
p ∈ (0, 1).
Finally, for the nonlinearity f (u) = u−α − up the left hand side of the equation is a monotone
operator, hence the solution is unique for any p > 0, λ > 0 and for a general domain Ω ⊂ Rn , see [7].
Thus we can see that even in the one-dimensional case the question of exact multiplicity is not
completely solved. We will give the full classification for the above three cases when Ω is an interval
in Section 3. The new results of the paper are presented in Theorems 1, 2 and 3. Theorems 1 and 3
are partly proven in previous works, however, here we show a simpler proof for the one-dimensional
case. Moreover, we give here a systematic approach to determine bifurcation diagrams for problem
(1-(2 when Ω is a ball. The results of Theorem 2 has not been presented before. The main novelty
there is that for f (u) = up − u−α there is a two co-dimensional bifurcation at p = 2α − 1. At this
value of the parameters the shape of the bifurcation diagram changes from a monotone curve to a
2
curve with a turning point. In Section 4 we extend some of these results to the case when Ω is a ball
in Rn . In Section 2 the shooting method and the time-map is introduced. These are the tools that
enable us to get the bifurcation diagrams.
2
Shooting method and time-map
2.1
Shooting method
The radially symmetric solutions of the BVP (1)-(2) can be determined by using the shooting method
when Ω is a ball. We remark that in the case when f is not singular then on a ball all solutions
are radially symmetric, [5]. However, in the singular case this symmetry result is available only in
one-dimension (n = 1), hence in higher dimension we will always determine the number of radial
solutions. Thus let us consider the BVP
∆u + λf (u) = 0
u|∂B1 = 0
(3)
(4)
where B1 is the unit ball. (Without loss of generality it can be√assumed that the radius of the
ball is 1.) Let us introduce the new unknown function ũ(x̃) = u(x̃/ λ). Then for this function the
BVP takes the form (after omitting the tilde)
∆u + f (u) = 0
(5)
u|∂BR = 0
(6)
√
where BR is the ball of radius R and R = λ. The radially symmetric solution of this BVP is
denoted by U (r) = u(x), where r = |x|. Hence for U we have
U 00 (r) + (n − 1)U 0 (r)/r + f (U (r)) = 0
U (R) = 0 U 0 (0) = 0.
(7)
(8)
To apply the shooting method let us consider the initial value problem
U 00 (r) + (n − 1)U 0 (r)/r + f (U (r)) = 0
U (0) = c U 0 (0) = 0
(9)
(10)
the solution of which is denoted by U (·, c). Then the time-map is defined as follows
T (c) = min{r > 0 : U (r, c) = 0} ;
D(T ) = {c > 0 : ∃r > 0 U (r, c) = 0}.
Thus U (·, c) is a solution of the BVP (7)-(8) if and only if T (c) = R. That is the number of radial
solutions of the BVP (5)-(6) is equal to the number of solutions of the equation T (c) = R. Hence
the number
√ of radial solutions of the BVP (3)-(4) is equal to the number of solutions of the equation
T (c) = λ. This means that once the graph of the time-map (relating c and R) is known then the
bifurcation diagram that relates λ to kuk (the maximum norm of u) can be obtained by using the
equations c = kuk, λ = R2 .
3
Our aim is to determine the shape of the graph of the time map when f belongs to one of the three
classes given in the Introduction. Note that we have to determine the exact number of solutions of
T (c) = R for a given R > 0. Hence we need the following characteristic properties of the time-map:
• the domain of the time-map,
• the limit of the time-map at the boundary points of its domain,
• the monotonicity of the time-map.
In the following Subsections we present some general results concerning the above properties of
the time-map. In this Section the concrete form of f is not used, the results are valid for general
nonlinearities.
2.2
The domain of the time-map
The domain of the time-map can be given explicitly for n = 1. Let F (y) =
the integral is finite, that means in our case α < 1). Then we have [10]
Ry
0
f (it is assumed that
Proposition 1 D(T ) = {c > 0 : F (c) > F (s) ∀ s ∈ (0, c) and f (c) 6= 0} =: Pf
In the higher dimensional case it can be difficult to determine the domain of the time-map. For
example in the case of f (u) = up Pohozhaev’s formula [11] has to be used. The relation D(T ) ⊂ Pf
can be proved in general [10], but the domain can be determined explicitly only in special cases. A
simple case is the following [6].
Proposition 2 If there exist u0 > 0 and m > 0 (u0 can be +∞) such that f (u) ≥ m for all
u ∈ (0, u0 ), then D(T ) ⊃ (0, u0 ).
2.3
The limit of the time-map
The limit of the time-map is studied in detail in [10], here we collect some results that are needed
for our nonlinearities. The proofs of the next statements can also be find there (Propositions 5, 6, 7
and 8).
Proposition 3 If there exist u0 > 0 and m > 0 such that f (u) ≥ m for all u ∈ (0, u0 ), then
lim T = 0.
0
Proposition 4 If c > 0 belongs to ∂D(T ) \ D(T ), then lim T = +∞.
c
Proposition 5 Let n = 1 and assume that there exist u0 such that (u0 , +∞) ⊂ D(T ).
(a) If lim
f (u)
u
= +∞ then lim T = 0.
(b) If lim
f (u)
u
= L ∈ (0, +∞) then lim T =
(c) If lim
f (u)
u
= 0 then lim T = +∞.
u→+∞
u→+∞
u→+∞
+∞
+∞
π
√
.
2 L
+∞
4
Proposition 6 Part (c) of Proposition 5 holds for all n ≥ 1.
Part (a) and (b) of Proposition 5 are not true in general for n > 1. Counter examples are shown
for example in [9]. However, in the case of special nonlinearities the limit of the time-map at infinity
can be determined. The next result (in a more general context )is proved in [6].
Proposition 7 If f (u) = u−α + up , 1 < p < (n + 2)/(n − 2) and 0 < α < 1, then lim T = 0.
+∞
2.4
Monotonicity of the time-map
The time-map is determined by the implicit equation
u(T (c), c) ≡ 0.
(11)
(We write u instead of U .) Differentiating (11) with respect to c we get
∂r u(T (c), c)T 0 (c) + ∂c u(T (c), c) ≡ 0,
(12)
Differentiating (12) we get that T 0 (c) = 0 implies
∂r u(T (c), c)T 00 (c) + ∂c2 u(T (c), c) = 0.
(13)
Differentiating (9)-(10) with respect to c and introducing
z(r, c) = ∂c2 u(r, c)
h(r, c) = ∂c u(r, c)
we get
rh00 (r, c) + (n − 1)h0 (r, c) + rf 0 (u(r, c))h(r, c) = 0
h(0, c) = 1, h0 (0, c) = 0
(14)
(15)
rz 00 (r, c) + (n − 1)z 0 (r, c) + rf 0 (u(r, c))z(r, c) + rf 00 (u(r, c))h2 (r, c) = 0
z(0, c) = 0, z 0 (0, c) = 0
(16)
(17)
Using the above notations, (12) and (13) are written as
u0 (T (c), c)T 0 (c) + h(T (c), c) = 0.
T 0 (c) = 0
⇒
u0 (T (c), c)T 00 (c) + z(T (c), c) = 0.
Using Sturm comparison of h and u0 the following result is proved in [10].
Lemma 1 If n = 1, then h has at most one root in [0, T (c)].
Proposition 8
1. Let n = 1. If uf 0 (u) − f (u) > 0, then T 0 < 0.
2. Let n ≥ 1. If uf 0 (u) − f (u) < 0, then T 0 > 0.
5
(18)
(19)
Proof. Sturm comparison of (9) (with u instead of U ) and (14) in the form
(rn−1 u0 )0 + rn−1
f (u)
u=0
u
and
(rn−1 h0 )0 + rn−1 f 0 (u)h = 0
yields the following, using that u has a root at T (c). If uf 0 (u) − f (u) > 0, then h has a root in
(0, T (c)), and because of Lemma 1 we have h(T (c)) < 0. Then using (18) and u0 (T (c), c) < 0 we get
T 0 (c) < 0. If uf 0 (u) − f (u) < 0, then h has no root in (0, T (c)), hence h(T (c)) > 0. Then using (18)
and u0 (T (c), c) < 0 again we get T 0 (c) > 0.
Proposition 9 Let n = 1.
1. If f 00 > 0, then T 0 (c) = 0 implies T 00 (c) < 0.
2. If f 00 < 0, then T 0 (c) = 0 implies T 00 (c) > 0.
Proof. If T 0 (c) = 0, then from (18) we get h(T (c)) = 0 and using Lemma 1 we have h(r, c) > 0
for all r ∈ (0, T (c)). Sturm comparison of (14) and (16) in the form
(rn−1 h0 )0 + rn−1 f 0 (u)h = 0
and
f 00 (u)h2
)=0
z
yields the following. If f 00 > 0, then z(T (c)) < 0. Then using (19) and u0 (T (c), c) < 0 we get
T 00 (c) < 0. If f 00 < 0, then z(T (c)) > 0. Then using (19) and u0 (T (c), c) < 0 we get T 00 (c) > 0.
(rn−1 z 0 )0 + rn−1 z(f 0 (u) +
3
Characterization of the time-map for n = 1
3.1
The case f (u) = u−α + up
According to Proposition 2 the domain of the time-map is D(T ) = (0, ∞). Proposition 3 yields
lim T = 0. The limit of the time-map at infinity depends on the value of p according to Proposition
0
5. If p > 1, then lim T = 0. If p = 1, then lim T = π/2. If p < 1, then lim T = ∞.
∞
∞
∞
For p ≤ 1 the time-map is strictly increasing. Namely, uf 0 (u)− f (u) = (p− 1)up − (α +1)u−α < 0,
hence by Proposition 8 we have T 0 > 0.
For p > 1 the function f is convex, hence by Proposition 9 the time-map cannot have a minimum.
Since its limits at zero and infinity are zero, the time-map has a unique maximum, and before the
maximum point it is strictly increasing, and after the maximum point it is strictly decreasing.
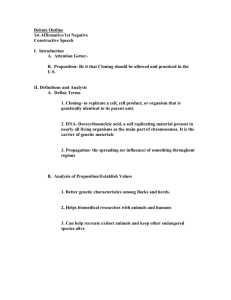
The graph of the time-map for p < 1, p = 1 and p >√1 is shown in Figure 1. These graphs simply
yield the bifurcation diagrams by using the relations λ = T (c) and c = kuk. Thus for the exact
number of positive solutions of (1)-(2) we have proved the following.
Theorem 1 Let n = 1 (Ω is an interval), f (u) = u−α + up and α ∈ (0, 1).
1. If p < 1, then for any λ > 0 the BVP (1)-(2) has a unique positive solution.
6
p
2. If p p
= 1, then for 0 < λ < π/2 the BVP (1)-(2) has a unique positive solution, and for
λ ≥ π/2 it has no positive solution.
3. If p > 1, then there exists λmax > 0 such that the number of positive solutions of (1)-(2) is two
if λ < λmax , it is one if λ = λmax , and it is zero if λ > λmax .
3.2
The case f (u) = up − u−α
According to Proposition 1 the domain of the time-map is D(T ) = (cp,α , ∞), where cp,α is determined
by the equation F (cp,α ) = 0. This statement can be easily verified by plotting the function F (u) =
up+1 /(p + 1) − u1−α /(1 − α). For the value of cp,α we get
¶ 1
µ
p + 1 p+α
.
(20)
cp,α =
1−α
The limit of the time-map at infinity depends on the value of p according to Proposition 5. If
p > 1, then lim T = 0. If p = 1, then lim T = π/2. If p < 1, then lim T = ∞.
∞
∞
∞
For p ≥ 1 the time-map is strictly decreasing. Namely, uf 0 (u)−f (u) = (p−1)up +(α+1)u−α > 0,
hence by Proposition 8 we have T 0 < 0.
For p < 1 the function f is concave, hence by Proposition 9 the time-map cannot have a maximum.
The monotonicity of the time-map is determined by the sign of T 0 (cp,α ). If T 0 (cp,α ) ≥ 0, then the
time-map is strictly increasing, since its limit at infinity is infinity and it cannot have a maximum. If
T 0 (cp,α ) < 0, then the time-map has a unique minimum, and before the minimum point it is strictly
decreasing, and after the minimum point it is strictly increasing. The sign of T 0 (cp,α ) was determined
for p = 0 in [8]. For 0 < p < 1 it has not been determined yet. The main difficulty in determining
the monotonicity of the time-map is to find the sign of T 0 (cp,α ). One of the main results of this paper
is the following Lemma.
Lemma 2 Let n = 1, f (u) = up − u−α and p ∈ (0, 1). If 2α < p + 1, then T 0 (cp,α ) < 0. If 2α > p + 1,
then T 0 (cp,α ) > 0.
The proof of this Lemma consists of several steps, therefore it is postponed to the Appendix.
The graph of the time-map for p > 1, p = 1, 2α − 1 < p < 1 and 0 < p ≤ 2α − 1 is shown in
Figure 2. Thus for the exact number of positive solutions of (1)-(2) we have proved the following by
using the time map.
Theorem 2 Let n = 1 (Ω is an interval), f (u) = up − u−α and α ∈ (0, 1).
1. If p > 1, then there exists λmax > 0 such that the number of positive solutions of (1)-(2) is one
if λ ≤ λmax , and it is zero if λ > λmax .
2. If p
p = 1, then there exists λmax > 0 such that the number
of positive solutions of (1)-(2) is one
p
if π/2 < λ ≤ λmax , it is zero if λ > λmax or λ ≤ π/2.
3. If 2α − 1 < p < 1, then there exist λmax > 0 and 0 < λmin < λmax such that the number of
positive solutions of (1)-(2) is zero if λ < λmin , it is one if λ = λmin , it is two if λmin < λ ≤
λmax , and it is one if λ > λmax .
4. If 0 < p ≤ 2α − 1, then there exists λmin > 0 such that the number of positive solutions of
(1)-(2) is zero if λ < λmin , and it is one if λ ≥ λmin .
7
3.3
The case f (u) = u−α − up
According to Proposition 1 the domain of the time-map is D(T ) = (0, 1). Proposition 3 yields
lim T = 0 and Proposition 4 yields lim T = ∞.
0
1
In this case the time-map is strictly increasing, because f 0 < 0, hence uf 0 (u) − f (u) < 0, therefore
by Proposition 8 we have T 0 > 0.
The graph of the time-map is shown in Figure 3. The exact number of positive solutions of (1)-(2)
can be obtained again by using the graph of the time map.
Theorem 3 Let n = 1 (Ω is an interval), f (u) = u−α − up , p > 0 and α ∈ (0, 1). Then for any
λ > 0 the BVP (1)-(2) has a unique positive solution.
4
4.1
Characterization of the time-map for n > 1
The case f (u) = u−α + up
According to Proposition 2 the domain of the time-map is D(T ) = (0, ∞). Proposition 3 yields
lim T = 0. The limit of the time-map at infinity cannot be determined for all values of p. If p < 1,
0
then Proposition 6 yields lim T = ∞. If 1 < p < (n + 2)/(n − 2), then according to Proposition 7
∞
we have lim T = 0. In the case p = 1 and p > (n + 2)/(n − 2) the limit of the time-map at infinity
∞
is not known.
For p ≤ 1 the time-map is strictly increasing. Namely, uf 0 (u)− f (u) = (p− 1)up − (α +1)u−α < 0,
hence by Proposition 8 we have T 0 > 0.
For p > 1 the monotonicity of the time-map is not known. In [6] it is shown that the time-map
has at least one maximum, but the uniqueness of the maximum is not proved there.
Thus the graph of the time-map for p < 1 has the same shape as in the case n = 1 shown in
Figure 1. For p ≥ 1 the exact shape of the graph of the time-map is not known for n > 1. Thus the
exact number of positive solutions of (1)-(2) can be determined in the case p < 1. We have proved
that the first statement of Theorem 1 holds for any n ≥ 1. In [7] it is shown that it is true also for
a general domain.
Theorem 4 Let n ≥ 1, Ω be a ball, f (u) = u−α + up and α ∈ (0, 1). If p < 1, then for any λ > 0
the BVP (1)-(2) has a unique radially symmetric positive solution.
4.2
The case f (u) = up − u−α
In this case the domain of the time-map is not known, it can only be shown that it is contained in
that of the one-dimensional case. If p < 1, then Proposition 6 yields lim T = ∞. In the case p ≥ 1
∞
the limit of the time-map at infinity is not known. Propositions 8 and 9 do not apply to this case,
hence the monotonicity of the time-map is not known.
4.3
The case f (u) = u−α − up
This is the simplest case since all the results obtained for n = 1 are true also for n > 1. According
to Proposition 2 the domain of the time-map is D(T ) = (0, 1). Proposition 3 yields lim T = 0 and
0
Proposition 4 yields lim T = ∞.
1
8
In this case the time-map is strictly increasing, because f 0 < 0, hence uf 0 (u) − f (u) < 0, therefore
by Proposition 8 we have T 0 > 0.
The graph of the time-map is the same as in the one-dimensional case shown in Figure 3. Thus
the exact number of positive solutions of (1)-(2) can be determined for any p > 0. We have proved
that Theorem 3 holds for any n ≥ 1 when Ω is a ball. In [7] it is shown that it is true also for a
general domain.
Theorem 5 Let n ≥ 1, Ω be a ball, f (u) = u−α − up , p > 0 and α ∈ (0, 1). Then for any λ > 0 the
BVP (1)-(2) has a unique radially symmetric positive solution.
5
Conclusion
We have studied the exact number of positive solutions of (1)-(2) for three different nonlinearities
in the case when Ω is an interval and when Ω is a ball for α ∈ (0, 1). In the one-dimensional case
we could give a full classification of the bifurcation diagrams, that is the exact number of positive
solutions can be given as the parameter λ is varied. The results are summarized in Table 1.
f (u) =
p<1
p>1
u−α + up
Fig. 4 a
Fig. 4 d
up − u−α
p > 2α − 1 Fig. 4 b, p < 2α − 1 Fig. 4 f
Fig. 4 e
u−α − up
Fig. 4 c
Fig. 4 c
Table 1: Summary of the bifurcation diagrams for n = 1.
This Table shows which bifurcation diagram in Figure 4 belongs to the different cases. For n = 1
all the possible bifurcation diagrams are determined (the case p = 1 is not shown in the Figure).
For n > 1 the bifurcation diagram can be determined only in a few cases, namely those in Figure
4a and c. Thus the exact number of positive solutions is not known when Ω is a ball and n > 1 in
the following cases.
• f (u) = u−α + up and p ≥ 1
• f (u) = up − u−α for any p > 0
Appendix
In the Appendix we prove Lemma 2. The proof is based on the fact that in the one-dimensional case
differential equation (9) can be solved, and for the time-map the following explicit formula can be
derived, see e.g. [10].
Z 1
c
1
p
T (c) = √
ds,
(21)
2 0
F (c) − F (cs)
Rs
where F (s) = 0 f (t)dt. Differentiating this expression with respect to c we get
Z 1
1
2F (c) − 2F (cs) − cf (c) + csf (cs)
0
T (c) = √
ds.
(22)
(F (c) − F (cs))3/2
2 2 0
9
Let us substitute into this equation f (s) = sp − s−α , F (s) = sp+1 /(1 + p) − s1−α /(1 − α) and
c = cp,α defined by F (cp,α ) = 0 and given in (20). Using the fact that
1−α
cp+1
p,α /(p + 1) = cp,α /(1 − α)
after some algebra we get
s
Z
¤
1
p+1 1£
0
T (cp,α ) =
(p − 1)s1+p + (1 + α)s1−α − p − α (s1−α − s1+p )−3/2 ds.
p+1
2 2cp,α 0
Applying the substitution sp+α = t in the integral yields
s
¸
Z ·
3α−1
1+p
1−α
1
1 + α p+α
p + 1 1 p − 1 p+α
0
T (cp,α ) =
+
− 1 (1 − t)−3/2 t 2(p+α) −1 dt.
t
t
p+1
2 2cp,α 0 p + α
p+α
(23)
(24)
Let us note that for α ≤ 1/3 the integral at zero is divergent (since the power of t is less than
−1), hence for α ≤ 1/3 we have T 0 (cp,α ) = −∞ (independently of the value of p). For α > 1/3
the integral can be expressed by using the Gamma function. This function is defined originally
for positive numbers, however using the formula Γ(x + 1) = xΓ(x) it can be extended to negative
numbers, except to negative integers. Then for x ∈ (−1, 0) we get Γ(x) < 0. We will use the notation
Γ(0) = ∞. The next Proposition proves the statement of Lemma 2, (since it is easy to show that
2α−p−1
> −1, when α > 1/3).
2(p+α)
Proposition 10 If α > 1/3, then
s
T 0 (cp,α ) =
³
´
3α−1
Γ
2(p+α)
π(p + 1)
³
´
p+1
2cp,α Γ 2α−p−1
2(p+α)
Proof. In order to prove this statement the integral in (24) has to be determined. Let us
introduce the notations
1+α
1−α
A=
,
B=
.
p+α
p+α
Then we have
p−1
= 1 − A,
p+α
1+p
= 1 + B,
p+α
3α − 1
A
= − B.
2(p + α)
2
Thus we have to prove that
Z 1
£
¤
√
A
(1 − A)t1+B + AtB − 1 (1 − t)−3/2 t 2 −B−1 dt = 2 π
0
Γ( A2 − B)
.
Γ( A2 − B − 12 )
(25)
We will need some properties of the Gamma function and the hypergeometric function, see e.g.
[1]. These will be listed below. The following integral defines the Beta function for x, y > 0 that can
be expressed in terms of the Gamma function.
Z 1
Γ(x)Γ(y)
tx−1 (1 − t)y−1 dt =
(26)
Γ(x + y)
0
The hypergeometric series 2 F1 with parameters a, b, c is defined as
10
2 F1 (a, b, c, z)
=1+
∞
X
(a)n (b)n z n
n=1
(c)n
(27)
n!
where (a)n = a(a + 1)(a + 2) . . . (a + n − 1) is the so-called Pochhammer symbol. For z = 1 the
sum of the hypergeometric series can be expressed with the Gamma function.
2 F1 (a, b, c, 1)
Γ(c)Γ(c − a − b)
Γ(c − a)Γ(c − b)
=
(28)
Now let us prove (25). First, using
(1 − A)t1+B + AtB − 1 = (A − 1)tB (1 − t) + tB − 1
we get
Z
1
£
¤
A
(1 − A)t1+B + AtB − 1 (1 − t)−3/2 t 2 −B−1 dt =
0
Z
Z
1
(A − 1)
−1/2
(1 − t)
t
A
−1
2
1
dt −
0
A
(1 − tB )(1 − t)−3/2 t 2 −B−1 dt.
0
The first integral can be expressed using (26) as
Z
1
(A − 1)
A
(1 − t)−1/2 t 2 −1 dt = (A − 1)
0
where we used Γ(1/2) =
Z
1
0
√
√ Γ( A2 )
Γ( A2 )Γ( 12 )
=
2
π A−1
Γ( A+1
)
Γ( 2 )
2
π and Γ(x + 1) = xΓ(x). Thus in order to prove (25) we have to show
√ Γ( A2 )
√ Γ( A2 − B)
A
(1 − tB )(1 − t)−3/2 t 2 −B−1 dt = 2 π A−1
− 2 π A−1
Γ( 2 )
Γ( 2 − B)
Let us apply the substitution t = 1 − s. Then
Z 1
Z 1
A
B
−3/2 A
−B−1
(1 − t )(1 − t)
t2
(1 − (1 − s)B )s−3/2 (1 − s) 2 −B−1 dt.
dt =
0
0
The binomial series yields
B
(1 − s) = 1 +
∞
X
(−1)n
n=1
∞
X
1
B(B − 1) . . . (B − n + 1)s = 1 +
(−B)n sn
n!
n!
n=1
n
where we have used B(B − 1) . . . (B − n + 1) = (−B)n (−1)n . Thus
Z
1
B
−3/2
(1 − (1 − s) )s
(1 − s)
A
−B−1
2
dt = −
0
Z
∞
X
(−B)n
n=1
n!
1
A
sn−3/2 (1 − s) 2 −B−1 dt.
0
The integral can be expressed again by using (26) since the powers are greater than −1
Z
1
B
−3/2
(1 − (1 − s) )s
0
(1 − s)
A
−B−1
2
∞
X
(−B)n Γ(n − 1/2)Γ( A2 − B)
dt = −
.
n!
Γ(n + A−1
− B)
2
n=1
11
(29)
Now let us observe that using Γ(x + 1) = xΓ(x) it can be shown that
Γ(n − 1/2) = Γ(
and
Γ(n +
−1 −1
1 −1
)( )n = −2Γ( )( )n
2
2
2 2
A−1
A−1
A−1
− B) = Γ(
− B)(
− B)n .
2
2
2
Hence using (27)
Z
1
B
−3/2
(1 − t )(1 − t)
t
A
−B−1
2
0
√ Γ( A2 − B)
2 π A−1
Γ( 2 − B)
∞
Γ( A2 − B) X (−B)n (−1/2)n 1
dt = 2 π A−1
=
Γ( 2 − B) n=1 ( A−1
− B)n n!
2
√
·
¸
−1 A − 1
,
− B, 1) − 1 .
2 F1 (−B,
2
2
Finally, using (28)
Z
1
(1 − tB )(1 − t)−3/2 t
0
A
−B−1
2
"
#
A
Γ( A2 − B) Γ( A−1
−
B)Γ(
)
2
2
dt = 2 π A−1
−1
A−1
A
Γ( 2 − B) Γ( 2 )Γ( 2 − B)
√
yielding (29).
Acknowledgment
This work was supported by OTKA grant T-049819.
References
[1] Abramowitz, M., Stegun, I.A., eds., Handbook of Mathematical Functions with Formulas,
Graphs, and Mathematical Tables, New York: Dover, (1972).
[2] Coclite, M.M, Palmieri, G., On a singular nonlinear Dirichlet problem, Commun. Partial Diff.
Equ. 14, 1315-1327, (1989).
[3] Choi, Y.S., Lazer, A.C., McKenna, P.J., Some remarks on a singular elliptic boundary value
problem, Nonlinear Anal. 32 305-314, (1998).
[4] Diaz, J.I., Morel, J.M., Oswald, L., An elliptic equation with singular nonlinearity, Comm.
P.D.E. 12, 1333-1344, (1987) .
[5] Gidas, B., Ni, W.N., Nirenberg, L., Symmetry and related properties via the maximum principle,
Commun. Math. Phys. 68, 209-243, (1979).
[6] Hernández, J., Karátson, J., Simon, P.L., Multiplicity for semilinear elliptic equations involving
singular nonlinearity, Nonlinear Analysis 65, 265-283, (2006).
[7] Hernández, J., Mancebo, F.J., Singular elliptic and parabolic equations, Handbook of differential
equations, M. Chipot, P. Quittner eds., Vol.3., 317-400, Elsevier, (2006).
12
[8] Horváth, T., Simon, P.L., On the exact number of solutions of a singular boundary value
problem, (under publication).
[9] Joseph, D.D., Lundgren, T.S., Quasilinear Dirichlet problems driven by positive sources, Arch.
Rational Mech. Anal. 49, 241-269, (1973).
[10] Karátson, J., Simon, P.L., Bifurcations of semilinear elliptic equations with convex nonlinearity,
Electron. J. Differential Equations, 1999 (43), 1-16, (1999).
[11] Pohozaev, S.I., Eigenfunctions of the equation ∆u+f (u) = 0, Soviet Math. 5, 1408-1411, (1965).
[12] Shi, J., Yao, M., On a singular nonlinear semilinear elliptic problem, Proc. Roy. Soc. Edinburgh
128A, 1389-1401, (1998).
[13] Stuart, C.A., Existence and approximation of solutions of nonlinear elliptic equations, Math. Z.
147, 53-63, (1976).
[14] Zhang, Z., On a Dirichlet problem with a singular nonlinearity, J. Math. Anal. Appl. 194,
103-113, (1995).
13
3
T(c)
α = 0.2
p = 0.5
2.5
2
p=1
1.5
1
0.5
p=5
0
0
5
c
10
15
Figure 1:
4
T(c)
2
α = 0.7
3.5
α = 0.7
1.95
p = 0.3
3
T(c)
1.9
p = 0.9
1.85
2.5
1.8
p = 0.9
2
1.75
1.5
p=1
1.7
1
1.65
0.5
0
p=1
1.6
p=5
0
5
10
c
15
1.55
0
10
20
c
30
Figure 2:
Captions for Figures
Figure 1. The three possibly different graphs of the time-map in the case f (u) = u−α + up . The
values of the parameter p are chosen from the three different classes: p = 0.5, p = 1 and p = 5, the
value α = 0.2 is the same for the three graphs.
Figure 2. The four possibly different graphs of the time-map in the case f (u) = up − u−α . The
values of the parameter p are chosen from the four different classes: p = 0.3, p = 0.9, p = 1 and
p = 5, the value α = 0.7 is the same for the four graphs. The curves for p = 0.9 and p = 1 are also
shown in the right hand side box with a longer c range.
Figure 3. The graph of the time-map in the case f (u) = u−α − up . The values of the parameters p
and α do not change the shape of the graph, here the values p = 2 and α = 0.2 were chosen.
Figure 4. Bifurcation diagrams for f (u) = u−α + up , f (u) = up − u−α and f (u) = u−α − up and
different values of p and α in the case n = 1. Table 1 shows the cases to which the bifurcation
diagrams correspond.
14
5
T(c)
4.5
p=2
4
3.5
α = 0.2
3
2.5
2
1.5
1
0.5
0
0
0.2
0.4
0.6
0.8
1
c
Figure 3:
15
a
|u|
20
b
|u|
1
0.8
15
10
c
|u|
0.6
10
0.4
5
0
5
5
λ
0
5
10
d
|u|
0
6
4
5
3
4
2
3
0.2
3
3.5
4
λ
e
|u|
0
20
0
λ
10
20
f
|u|
15
10
1
0
0
0.5
1
λ
1.5
5
2
1
0
0.5
Figure 4:
15
λ
0
10
15
λ
20