A globally applicable, season-specific model for estimating the
advertisement

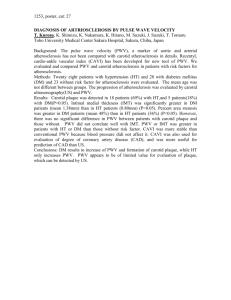
A globally applicable, season-specific model for estimating the weighted mean temperature of the atmosphere YiBin Yao, Shuang Zhu & ShunQiang Yue Journal of Geodesy Continuation of Bulletin Géodésique and manuscripta geodaetica ISSN 0949-7714 Volume 86 Number 12 J Geod (2012) 86:1125-1135 DOI 10.1007/s00190-012-0568-1 1 23 Your article is protected by copyright and all rights are held exclusively by SpringerVerlag. This e-offprint is for personal use only and shall not be self-archived in electronic repositories. If you wish to self-archive your work, please use the accepted author’s version for posting to your own website or your institution’s repository. You may further deposit the accepted author’s version on a funder’s repository at a funder’s request, provided it is not made publicly available until 12 months after publication. 1 23 Author's personal copy J Geod (2012) 86:1125–1135 DOI 10.1007/s00190-012-0568-1 ORIGINAL ARTICLE A globally applicable, season-specific model for estimating the weighted mean temperature of the atmosphere YiBin Yao · Shuang Zhu · ShunQiang Yue Received: 18 October 2011 / Accepted: 17 April 2012 / Published online: 28 April 2012 © Springer-Verlag 2012 Abstract In GPS meteorology, the weighted mean temperature is usually obtained by using a linear function of the surface temperature Ts . However, not every GPS station can measure the surface temperature. The current study explores the characteristics of surface temperature and weighted mean temperature based on the global pressure and temperature model (GPT) and the Bevis Tm –Ts relationship (Tm = a + bTs ). A new global weighted mean temperature (GWMT) model has been built which directly uses three-dimensional coordinates and day of the year to calculate the weighted mean temperature. The data of year 2005–2009 from 135 radiosonde stations provided by the Integrated Global Radiosonde Archive were used to calculate the model coefficients, which have been validated through examples. The result shows that the GWMT model is generally better than the existing liner models in most areas according to the statistic indexes (namely, mean absolute error and root mean square). Then we calculated precipitable water vapor, and the result shows that GWMT model can also yield high precision PWV. List of abbreviations GPS Global positioning system GPT Global pressure and temperature GWMT Global weighted mean temperature GNSS Global navigation satellite system ECMWF European Centre for Medium-Range ECMWF Weather Forecasts NCEP/NCAR National Centers for Environmental Prediction/National Center for Atmospheric Research IGRA Integrated Global Radiosonde Archive IGS International GNSS service MAE Mean absolute error PWV Precipitable water vapor RMS Root mean square ZWD Zenith wet delay Keywords GPS meteorology · Weighted mean temperature · GPT model · GWMT model Because water vapor is very unevenly distributed in space and in time, clarifying and quantifying the crucial roles that water vapor plays in the weather and climate systems, particularly in a predictive sense, requires meteorologists to measure the space–time distribution of water vapor as well as possible. This challenging task is achieved in a coordinated international effort using radiosondes, space-based sensing systems including microwave radiometers, and, more recently, the Global Positioning System (GPS). The technique known as ground-based GPS meteorology, often shortened to ‘GPS met’, uses networks of continuously operating GPS stations to infer the vertically integrated or ‘total column’ quantity of water vapor overlying each station in the GPS network (Bevis et al. 1992, 1994; Duan et al. 1996). This integral measure, known as precipitable water or (rather redundantly) as Electronic supplementary material The online version of this article (doi:10.1007/s00190-012-0568-1) contains supplementary material, which is available to authorized users. Y. Yao (B) · S. Zhu · S. Yue School of Geodesy and Geomatics, Wuhan University, Wuhan 430079, China e-mail: ybyao@whu.edu.cn S. Zhu e-mail: shuangzhu@whu.edu.cn S. Yue e-mail: shqyue@whu.edu.cn 1 Introduction 123 Author's personal copy 1126 Y. Yao et al. precipitable water vapor (PWV), is expressed in length units and refers to the height of the column of liquid water that would result if it were possible to condense all the water vapor in the overlying column of atmosphere. While GPS meteorology cannot, like a radiosonde profile, describe the vertical distribution of water vapor, GPS meteorology is attractive because it is an ‘all-weather’ system, it operates continuously in time, it does not suffer from significant instrumental drifts, and GPS networks are now ubiquitous over most land masses, and are continuing to expand their spatial coverage. GPS signal delays are typically characterized in terms of the zenith delay (i.e., the delay accumulated along a vertical path through the atmosphere) and two gradient parameters that quantify the azimuthal variability of delay. GPS networks actually sense the total propagation delay imposed by the neutral atmosphere, often referred to as the neutral delay. The neutral delay is composed of the hydrostatic delay, which is proportional to surface pressure, and the wet delay which is very nearly proportional to the total quantity of water vapor along the raypath (Saastamoinen 1972; Hogg et al. 1981; Davis et al. 1985). Thus the zenith neutral delay (ZND) is the sum of the zenith hydrostatic delay (ZHD) and the zenith wet delay (ZWD). The central procedure of GPS meteorology is: (i) infer the ZND time series at each GPS station as part of a geodetic analysis, (ii) estimate the ZHD from a measure or a prediction of surface pressure at each GPS station, (iii) deduce the ZWD via the identity ZWD = ZND − ZHD, and (iv) transform the PWV estimate into an estimate of PWV using the relation PWV = · ZWD (1) When the surface pressure is predicted using a weather model, rather than locally measured using a barometer, then the resulting error in the ZHD estimate tends to dominate the error in the PWV estimate (particularly in regions with significant topography). If surface pressure is measured using a well-calibrated barometer, and if modern mapping functions (Boehm et al. 2007) are used in the geodetic analysis of delay, then the largest source of error in the PWV estimate often derives from the value assigned to the factor , in Eq. (1). Reducing this particular error source is the purpose of our study. The conversion factor in Eq. (1) can be expressed as = ρw Rv 106 (k3 /Tm ) + k2 (2) where ρw is the density of water, Rv is the specific gas constant, k2 and k3 are atmospheric refractivity constants (Davis et al. 1985; Bevis et al. 1994), and Tm is the weighted mean temperature of the atmosphere (Davis et al. 1985) which varies in space and in time. The uncertainty in is dominated by the uncertainty in Tm (Bevis et al. 1994). Therefore, our goal in this paper is to provide a new and convenient means 123 of estimating Tm so as to reduce its error level, and thereby minimize the error associated with the prediction of . While Tm can be computed using radiosonde profiles, or using numerical weather models (Bevis et al. 1994), most published studies to date estimate Tm utilizing the suggestion of Bevis et al. (1992) that Tm is linearly related to surface temperature, Ts , i.e., Tm = a + bTs (3) The main advantage of this approach is that it is relatively simple to implement. Bevis et al. (1992) noted that to get the best results, the constants a and b should be ‘tuned’ to specific areas and seasons, but went on to offer some ‘average’ values for a and b, suitable for use in mid latitudes, based on an analysis of 8,718 radiosonde profiles. This led to the equation Tm = 70.2 + 0.72Ts , in which 70.2, Tm and Ts are specified in Kelvin. In a later conference presentation, Bevis et al. (1995) revised this equation to Tm = 85.63 + 0.668Ts (85.63 is specified in Kelvin), based on an analysis of about 250,000 radiosonde profiles with a nearly global distribution. These two sets of equations look quite different, but in fact, they make fairly similar predictions for the range of surface temperatures (say −20 to 35 ◦ C) commonly encountered at GPS stations. The second version of the equation has been most widely adopted. Ross and Rosenfeld (1997) emphasized the advantages of tuning the constants a and b to site and season. Wang et al. (2005) compared and analyzed global estimates of Tm from three different data sets from 1997 to 2002: ECMWF 40year reanalysis (ERA-40), the NCEP/NCAR, and the IGRA, and analyzed the limitations of the Bevis Tm –Ts relationship. Later, many practitioners of GPS meteorology have tuned the constants a and b, so as to optimize equation (3) for their regions, and often by season as well. In China, these studies include Li et al. (1999); Liu et al. (2000), Gu et al. (2006), Li et al. (2006), Wang et al. (2007, 2011), Lv et al. (2008). In this work, we take a new approach to estimating Tm based on the GPT model (Boehm et al. 2007) and the Bevis Tm –Ts relationship. 2 Computing the weighted mean temperature, Tm , from radiosonde profiles The weighted mean temperature Tm was defined by Davis et al. (1985) as the ratio of two vertical integrals though the atmosphere: (e/T ) dz Tm = (4) e/T 2 dz where e is the vapor pressure, T is absolute temperature, and both integrals extend from the surface to the top of the atmosphere. Since there is very little water vapor above the Author's personal copy Model for estimating the weighted mean temperature troposphere, Tm can be thought of as the (unconventionally defined) mean temperature of water vapor in the troposphere, overlying any given point on the ground. If Tm is computed from radiosonde profiles, or using the output fields of a numerical weather model, the integrals in Eq. (4) will be discretized into sums of contributions from successive atmospheric layers, thus: n ei 1 Ti h i (5) Tm = n ei h i 1 T2 i where ei Ti = ei Ti ei ei−1 + 2 Ti2 Ti−1 ei i−1 , h i is , = 2 2 2 T e + Ti−1 i the thickness of the atmosphere at the ith layer and ei and Ti are the water vapor pressure and temperature at the top of the atmosphere at the ith layer, respectively. ei−1 , and Ti−1 are the water vapor pressure and temperature at the bottom of the atmosphere at the ith layer, respectively, and n is the number of layers. More layers result in higher accuracy. This method applies only if the station sounding data are available; however, the practicality is not strong. Bevis et al. (1992, 1995) use this approach to compute Tm for a large suite of radiosonde profiles, and correlate Tm with surface temperature (i.e, the first temperature reported by the radiosonde). Having computed large numbers of (Ts , Tm ) pairs, they performed a linear regression based on Eq. (1), minimizing the difference between observed and predicted Tm . 3 GPT model that calculates Ts The Bevis Tm –Ts relationship shows that Tm can be expressed as a linear function of Ts . However, in practical application, the real-time global surface temperature at any location cannot be obtained; this problem has directly obstructed the development of GPS meteorology. The GPT model, which was established by Boehm et al. (2007), solves this problem. The model is based on degree and order nine spherical harmonics. In consideration of the relationship between surface temperature and location and season of station, the GPT model can provide pressure and temperature at any station on the Earth’s surface using the station’s three-dimensional coordinates and day of the year as input parameters. 1127 temperature and measured weighted mean temperature, is greatly affected by station location and time. Therefore, the linear model is not considered in the establishment of the GWMT model. To further validate the above conclusion, in the present study, 377 radiosonde stations in the world were randomly selected (the data can be obtained from the IGRA website for free). The bad radiosonde data with less than 15 layers or observation heights lower than 12 km have been excluded. Tm was calculated by the integral method using Eq. 4. It was assumed true to evaluate the accuracy of Tmb , calculated using the station surface temperature Ts and the Bevis Tm – Ts relationship. The results of four stations from different regions are shown in Fig. 1. The information about the four stations is shown in Table 1. Figure 1 shows that there is a significant time-varying feature in the residuals of Tmb (the Bevis Tm –Ts relationship). It indicates that the simple linear model developed by Bevis does not respond well to the annual feature of Tm ; it even weakens to some extent. To separately analyze the relationship between elevation and the residuals of Tmb , The residuals of 136 stations in the mid-latitudes (N35◦ –N45◦ ) were analyzed. The mean residuals of Tmb at different stations are shown in Fig. 2. Figure 2 shows that, in the same latitude zone, the mean residual grows with elevation. This confirms that the Bevis Tm –Ts relationship cannot fully reflect the relationship between station elevation and the weighted mean temperature. To separately analyze the relationship between latitude and residuals of Tmb , excluding the effect of station elevation, the current study analyzed the mean residuals of Tmb from 290 stations whose elevations are less than 500 m in the S10◦ –N45◦ area. The result is shown in Fig. 3. Figure 3 shows that, as the latitude becomes higher, the overall residuals of the Tmb become larger. It proves that the Bevis Tm –Ts relationship cannot fully reflect the relationship between station latitude and the weighted mean temperature. In summary, based on the analysis above, we notice the correlation between the weighted mean temperature and station location and time variation. A simple linear model cannot truly reflect that. Therefore, considering a refinement of the linear relationship between Tm and Ts , the GWMT model has been established. According to the Bevis Tm –Ts relationship, the relationship between the station surface temperature Ts and the weighted mean temperature Tm is 4 GWMT model and its determination Most studies on weighted mean temperature had focused on establishing a local model by using regional sounding station data, but not to provide a globally applicable model. Moreover, the linear model, which is based on the station surface Tm = b1 + b2 Ts (6) According to the GPT model, the equation for calculating the surface temperature is 123 Author's personal copy 1128 Y. Yao et al. 10 (a) 15 94120 (b) 41112 10 DeltaTm(K) DeltaTm(K) 5 0 -5 5 0 -5 -10 -10 -15 01 02 03 04 05 06 07 08 09 10 11 03 04 05 06 Year (c) 20 10 0 -10 01 20 47401 DeltaTm(K) DeltaTm(K) 30 02 03 04 05 06 07 08 09 10 11 Year 07 08 09 10 (d) 10 0 -10 01 11 17351 02 03 04 05 06 07 08 09 10 11 Year Year Fig. 1 Residuals at four stations. Delta Tm is the residual of Tmb and Tm , Ts used in the Bevis Tm –Ts relationship is surface temperature Table 1 Information of the four stations used in Fig. 1 Number Name Latitude (◦ ) Longitude (◦ ) 94120 DARWIN −12.43 130.87 29 Height (m) 41112 ABHA 18.23 42.65 2,093 47401 WAKKANAI 45.42 141.68 11 17351 ADANA 37.05 35.35 28 10 16 12 Mean of DeltaTm/K m Mean of Delta T (K) 14 10 8 6 4 2 0 -2 0 500 1000 1500 2000 2500 0 3000 -5 -10 Height(m) Fig. 2 Relationship between the residuals of Tmb and station elevation. Mean of Delta Tm is the mean residual of Tmb at one station from 2000 to 2010, Ts used in the Bevis Tm –Ts relationship is surface temperature doy − 28 2π − 0.0065h Ts = atm + ata · cos 365.25 55 i=1 123 0 10 20 30 40 latitude Fig. 3 Relationship between the residuals of Tmb and latitude. Mean of Delta Tm is the mean residual of Tmb at the stations from 2000 to 2010, Ts used in the Bevis Tm –Ts relationship is surface temperature (7) ata = where atm = 5 55 [at− amp(i) · a P(i) + bt− amp(i) · b P(i)] (8) i=1 [at− mean(i) · a P(i) + bt− mean(i) · b P(i)] doy is the day of the year, a P(i) and b P(i) are spherical harmonics obtained by latitude and longitude, and at− mean(i), Author's personal copy Model for estimating the weighted mean temperature 1129 Fig. 4 135 radiosonde stations used for the determination of GWMT bt− mean(i), at− amp(i), bt− amp(i) are vectors with 55 coefficients. Substituting Eq. 7 into Eq. 6 gives: doy − 28 2π Tm = b1 + b2 atm + b2 ata · cos 365.25 −0.0065b2 h. (9) All elements of the first column of the vector a P(i) in the GPT model are 1; therefore, b1 + b2 atm will eventually be absorbed into α1 α1 = 55 [atm − mean(i) · a P(i) + btm − mean(i) · b P(i)]. i=1 (10) In addition, we make α2 = 0.0065b2 and α3 = b2 ata; thus, Eq. 9 can be simplified to doy − 28 2π (11) T m = α1 + α2 h + α3 cos 365.25 where α1 = 55 because some grids have no station, or some stations do not have enough data, as shown in Fig. 4. By using more than 370,000 radiosonde profiles of 5 years (January 2005 to December 2009) at 135 stations, we got the atmospheric weighted mean temperature Tm through Eq. 4, and considered it as a true value. Combined with Eq. 11 and Eq. 12, the model coefficients can be estimated in a least squares adjustment. We use the global distribution of α1 , α2 , and α3 to represent the results; however, α2 is a constant coefficient. α2 = −0.0041 Figure 5 shows that there are obvious problems in the southern Pacific for α1 , as well as in the southern Pacific and east coast of the African continent for α3 , which may lead to lower accuracies in those areas. Combined with Fig. 4, we inferred that it may due to the low observation density in these areas. However, considering that GPS data in those areas is hard to get and GPS meteorology is not applied there, it will not affect the application of GWMT. In addition, we will use other data which are more widely distributed to calculate the model coefficients in future studies, to get better results. [atm − mean(i) · a P(i) + btm − mean(i) · b P(i)] i=1 α3 = 55 [atm − amp(i) · a P(i) + btm − amp(i) · b P(i)]. i=1 (12) atm_mean(i), btm − mean(i), atm_amp(i), btm − amp(i), and α2 are the model coefficients determined in a least squares adjustment. The key to obtain the coefficients of the model is to select uniformly distributed radiosonde stations and high-quality radiosonde data. We divided the globe into 10◦ × 20◦ global grids evenly, and then selected one station from each grid to build the model. Finally, only 135 stations have been selected 5 Validation of GWMT To evaluate the accuracy of the GWMT model, we compared the model with the widely used Bevis Tm –Ts relationship. MAE and RMS were considered as the standard for accuracy evaluation, i.e, N 1 Tm i − Tm i N i=1 N 1 T − Tm 2 RMS = mi i N MAE = (13) (14) i=1 123 Author's personal copy 1130 Y. Yao et al. Global plots of α 3 Global plots of α 1 80 80 360 60 15 60 10 340 40 320 20 0 300 -20 280 -40 260 -60 Latitude/degree Latitude/degree 40 5 20 0 0 -5 -20 -10 -40 -15 -60 -20 240 -80 -180 -150 -120 -80 -90 -60 -30 0 30 60 90 120 150 180 220 Longitude/degree -25 -180 -150 -120 -90 -60 -30 0 30 60 90 120 150 180 Longitude/degree Fig. 5 Global distribution of α1 and α3 in Eq. 11 where Tm i is the value calculated by the model, Tm i is the true value derived from the integration of the radiosonde data, and N is the number of sounding times. MAE reflects the mean bias between the GWMT model and the true value, whereas RMS reflects the applicability, reliability, and stability of the GWMT model. To test the internal and external accuracies of the GWMT model, the data of two set of radiosonde stations are used to evaluate the statistical precision of the GWMT model and the Bevis Tm –Ts relationship, and the results were analyzed and compared. The stations which used for establishing the model were applied to evaluate the internal accuracy of the model, and those did not were used to evaluate the external accuracy. There are two sources of surface temperature for the Bevis Tm –Ts relationship for these stations: one is calculated by the GPT model, and the other one is directly extracted from the radiosonde data. 5.1 Testing of stations used for establishing the model (internal accuracy testing) The current study equally divided the globe into 18 belts with respect to latitude (10◦ per latitude belt) and selected one station from each belt. 18 stations were chosen from the 135 stations used for establishing the model. We calculated Tmg (GWMT model) and Tmb (Bevis Tm –Ts relationship) for 2010, then calculated true values Tm using Eq. 4 and then calculated their MAE and RMS, respectively. The results are shown in Fig. 6. Figure 6a, b shows that the precision of Tmg from the GWMT model is uniform, MAE<5 K, and RMS<6 K, much better than the precision of Tmb from the Bevis Tm –Ts relationship (Ts from the GPT model). The difference is more significant in high latitudes. Figure 6c, d shows that the accuracy of Tmg and Tmb (Ts are true values) are generally at the same level, while the GWMT model shows better stability 123 by effectually restraining the greater error. Statistical data are shown in Table 2. Table 2 shows that the results of Tmg from the GWMT model are much better than Tmb using GPT Ts and is slightly better than Tmb using the true Ts . This shows that the approach of the GWMT model is reasonable and feasible in theory and in practice. And the model is independent of site surface temperature. Furthermore, when there is no surface observation temperature available, it has a striking advantage compared with the Bevis Tm –Ts relationship or with the other local models. 5.2 Testing of stations not used for establishing the model (external accuracy testing) The testing of the stations which used for establishing the model can only prove the rationality and effectiveness of the GWMT model in some degree, but it cannot fully demonstrate the reliability and adaptability of the GWMT model. Therefore, we examined the stations that have not used for establishing the model. Based on Sect. 5.1, 59 stations were selected (five stations from each belt) to test the model. Not every belt, however, could provide five stations because of bad data quality and station distribution. The results are shown in Fig. 7. Figure 7a, b shows that the accuracy of Tmg from the GWMT model is generally better than Tmb from the Bevis Tm –Ts relationship (Ts from GPT model) in the northern hemisphere; however, the accuracy of the GWMT model at several southern hemisphere stations is slightly worse. Figure 7c, d shows the similar trends. The specific statistical data are shown in Table 3. Table 3 clearly shows that the accuracy of Tmg from the GWMT model is still better than that of Tmb using GPT Ts at the stations that have not used for establishing the model. The accuracy is almost at the same level compared with Tmb Author's personal copy Model for estimating the weighted mean temperature 1131 (a) (b) 20 Tmg.MAE Tmb.MAE 15 10 5 0 -80 -60 -40 -20 0 20 40 60 RMS of GWMT(*) and Bevis(O) /K MAE of GWMT(*) and Bevis(O) /K 20 16 14 12 10 8 6 4 2 80 Tmg.RMS Tmb.RMS 18 -80 -60 -40 -20 latitude (c) 40 60 80 8 Tmg.MAE Tmb.MAE 7 6 5 4 3 2 -80 -60 -40 -20 0 20 40 60 RMS of GWMT(*) and Bevis(O) /K MAE of GWMT(*) and Bevis(O) /K 20 (d) 8 1 0 latitude 6 5 4 3 2 80 Tmg.RMS Tmb.RMS 7 -80 -60 -40 -20 latitude 0 20 40 60 80 latitude Fig. 6 Results of the 18 stations used for modeling (K). Ts of the Bevis Tm –Ts relationship in a and b are calculated from the GPT model. Ts of the Bevis Tm –Ts relationship in c and d are true values Table 2 Statistical data of the 18 stations used for modeling (K) MAE (K) Mean RMS (K) Max Min Mean Max Min 4.0 5.4 2.5 GWMT 3.1 4.3 1.5 Bevis Tm (GPT) 5.5 18.1 1.6 6.5 18.4 2.9 Bevis Tm (True Ts ) 3.5 7.4 1.4 4.4 7.7 2.0 using the true Ts . Thus, the GWMT model can provide precise weighted mean temperature in the global scope. 5.3 Comparison between GWMT and Bevis Tm –Ts relationship Sections 5.1 and 5.2 have shown that the GWMT model has higher accuracy compared with the other models. However, the comparison is relative to the real Tm calculated by sounding data. Therefore, the GWMT model was then compared with the Bevis Tm –Ts relationship by calculating the mean values and standard deviations of the differences. We selected all the 77 stations mentioned earlier. The result is shown in Fig. 8. Figure 8 shows, by latitude band, the mean values and standard deviations of the differences of Tm calculated by the GWMT and the Bevis Tm –Ts relationship. GWMT model is closer to the Bevis Tm –Ts relationship when using true Ts . The differences are close to zero in most latitude belts. On the other hand, the differences with the Bevis Tm –Ts relationship when using GPT Ts are larger. Between the latitudes N20◦ and N80◦ , the differences are more significant. It proves that 123 Author's personal copy 1132 Y. Yao et al. (a) (b) 25 Tmg.MAE Tmb.MAE 20 15 10 5 0 -80 -60 -40 -20 0 20 40 60 RMS of GWMT(*) and Bevis(O) /K MAE of GWMT(*) and Bevis(O) /K 25 Tmg.RMS Tmb.RMS 20 15 10 5 0 80 -80 -60 -40 -20 latitude (c) 40 60 80 15 Tmg.MAE Tmb.MAE 12 10 8 6 4 2 -80 -60 -40 -20 0 20 40 60 RMS of GWMT(*) and Bevis(O) /K MAE of GWMT(*) and Bevis(O) /K 20 (d) 14 0 0 latitude Tmg.RMS Tmb.RMS 10 5 0 80 -80 -60 -40 latitude -20 0 20 40 60 80 latitude Fig. 7 Results of 59 stations not used for establishing the model (K). Ts of the Bevis Tm –Ts relationship in a and b are calculated from the GPT model. Ts of the Bevis Tm –Ts relationship in c and d are true values Table 3 Statistical results of 59 stations not used for establishing the model (K) MAE (K) Mean Max Min Mean Max Min GWMT 3.7 13.1 1.4 4.6 14.2 1.7 Bevis Tm (GPT) 4.8 20.1 1.3 5.7 21.0 1.7 Bevis Tm (True Ts ) 3.3 10.5 1.0 4.1 12.0 1.5 the GWMT model is closer to the Bevis Tm –Ts relationship when using the true Ts . 5.4 Comparison between GWMT and GGOS atmosphere data The results above indicate that the GWMT model has higher accuracy in areas where the station density is greater. However, Fig. 5 shows that the accuracy in some areas with no stations like the southern Pacific is lower. In order to evaluate the accuracy, GMWT is also compared with the grids 123 RMS (K) of weighted mean temperature provided by project GGOS Atmosphere, which provides Tm globally on 2◦ × 2.5◦ grids every 6 hour (http://ggosatm.hg.tuwien.ac.at/). For example, we used the epoch 0 UT on 27 January 2012. Figure 9 shows that the differences between GWMT and GGOS Atmosphere in most areas are small, mostly between −10 and 10 K, which means that the accuracy of Tmg in most areas is good. However, the accuracy in southern Pacific is worse, similar to the abnormal areas of α1 and α3 in Fig. 5. This confirmed our hypothesis in Sect. 4: it is because the absence of the radiosonde station data. However, the Author's personal copy Model for estimating the weighted mean temperature True Ts 1133 GPT Ts will be coming from these areas. We will use other data sets which are globally available to calculate the model coefficients in future studies, expecting to get more reliable results globally. 50 40 30 dTm/K 20 5.5 Validation of PWV 10 0 -10 -20 -30 -40 -80 -60 -40 -20 0 20 40 60 80 Latitude/degree Fig. 8 Differences between the GWMT model and the Bevis Tm –Ts relationship. Ts used in the red line are calculated from the GPT model, Ts used in the blue line are true values of Ts 90 80 Latitude/degree 70 50 60 30 40 10 20 -10 0 In GPS meteorology, our purpose is to improve the accuracy of PWV. Therefore, we use the GWMT model to calculate the PWV to verify its practicality. Wuhan station was not used for establishing the model. Figure 10 shows the PWV comparison at Wuhan, China, in 2010. Figure 10 shows that the GPS/PWV (GWMT Tm ) and RS PWV are very close in value. In addition, they have the same changing trend. The same holds for GPS PWV (RS Tm ).The differences of PWV (mean value and standard deviations) are shown in Fig. 11. Figure 11 shows that the differences between GPS/PWV (GWMT Tm ) and RS PWV are small, and the mean value is 1.2 mm. It is the same for the differences between GPS/PWV (RS Tm ) and RS PWV. This strongly proves that high-accuracy PWV can be calculated by GWMT, which means that GWMT can play an important role in the application of global remote sensing of the atmosphere. -30 -50 -20 -70 -40 -90 -180 -150 -120 -90 -60 -30 0 30 60 90 120 150 180 Longitude/degree Fig. 9 Comparison of global Tm between GGOS Atmosphere and the GWMT model on 27 January 2012 at 0 UT lower accuracy in those areas does hardly affect the application of the GWMT model, because very little GPS data 6 Conclusions By studying the characteristics of weighted mean temperature, based on the GPT model and the Bevis Tm –Ts relationship, this paper proposes a new model called GWMT. This model fully takes the effects of the station location (longitude, latitude, and elevation) and the season (day of the year) when calculating the weighted mean temperature Tm into account. The model coefficients have been solved based on (a) (b) 80 GPS PWV(GWMT Tm) RS PWV 70 60 60 50 50 PWV/mm PWV/mm 70 80 40 30 40 30 20 20 10 10 0 Jan10 Feb10Mar10 Apr10 May10 Jun10 Jul10 Aug10 Sep10 Oct10 Nov10Dec10 Date/day Fig. 10 PWV comparison at Wuhan station. GPS PWV (GWMT Tm ) is calculated by using ZTD (provided by IGS) and the GWMT model, RS PWV is calculated by using IGRA sounding data, GPS PWV (RS GPS PWV(RS Tm) RS PWV 0 Jan10 Feb10Mar10 Apr10 May10 Jun10 Jul10 Aug10 Sep10 Oct10 Nov10 Dec10 Date/day Tm ) is calculated by using ZTD (provided by IGS) and IGRA Tm . a The comparison between GPS PWV (GWMT Tm ) and RS PWV, b the comparison between GPS PWV (RS Tm ) and RS PWV 123 Author's personal copy 1134 Y. Yao et al. (GWMT Tm) Mean=1.2 (b) RMS=4.1 30 25 25 20 20 15 15 dPWV/mm dPWV/m (a) 30 10 5 Mean=1.3 RMS=4.0 10 5 0 0 -5 -5 -10 -10 -15 (RS Tm) -15 Jan10 Feb10 Mar10 Apr10 May10 Jun10 Jul10 Aug10 Sep10 Oct10 Nov10Dec10 Date/day Jan10 Feb10 Mar10 Apr10 May10 Jun10 Jul10 Aug10 Sep10 Oct10 Nov10 Dec10 Date/day Fig. 11 Differences of PWV at Wuhan station. a The differences between GPS/PWV (GWMT Tm ) and RS PWV, b the differences between GPS PWV (RS Tm ) and RS PWV 5 years of radiosonde data at 135 stations and evaluated the internal and external accuracies of the model. The result demonstrates that the model can directly calculate the weighted mean temperature Tm through station locations and day of the year and has a higher accuracy than the Bevis Tm –Ts relationship. Thus, we also get high-precision PWV result by GWMT. With strong reliability and practicality, it does not rely on ground-measured temperatures, and can be more extensively applied than any other local model. The model is the original result of calculating weighted mean temperature and strongly pushes forward the development and application of numerical weather prediction. However, we find that in some areas such as the southern Pacific, the accuracy of Tm is lower than that in the continent, which is caused by low distribution density of radiosonde stations. We cannot avoid the problem, however, it would not affect the worldwide application of the GWMT and subsequent research because very little GPS data will be coming from these areas. We will use other data sets which are more widely distributed to amend the model coefficients in the future studies. Acknowledgments The authors would like to thank IGRA for providing access to the web-based IGRA data and GGOS Atmosphere for providing grids of weighted mean temperature. We also appreciate the helpful comments of Michael Bevis, Johannes Boehm, Roland Klees and the anonymous reviewers.This research was supported by the National Natural Science Foundation of China (41021061; 41174012). References Askne J, Nordius H (1987) Estimation of tropospheric delay for mircowaves from surface weather data. Radio Sci 22(3):379–386 Bevis M, Businger S, Chiswell S et al (1994) GPS meteorology: mapping zenith wet delays onto precipitable water. J Appl Meteorol 33:379–386 123 Bevis M, Businger S, Herring AT et al (1992) GPS meteorology: remote sensing of atmospheric water vapor using the global positioning system. J Geophys Res 97(D14):15787–15801 Bevis M, Businger S, Chiswell S (1995) Earth-based GPS meteorology: an overview, American Geophysical Union 1995 fall meeting, EOS, Transactions, American Geophysical Union, vol 76, No. 46 (supplement) Boehm J, Heinkelmann R, Schuh H (2007) Short note: a global model of pressure and temperature for geodetic applications. J Geod 81(10):679–683 Davis JL, Herring TA, Shapiro II, Rogers AEE, Elgered G (1985) Geodesy by radio interferometry: effects of atmospheric modeling errors on estimates of baseline length. Radio Sci 20:1593–1607 Ding JC (2009) GPS meteorology and its applications. China Meteorological Press, Beijing 1–10 Duan J, Bevis M, Fang P et al (1996) GPS meteorology: direct estimation of the absolute value of precipitable water. J Appl Meteorol 35(6):830–838 Gu XP (2004) Research on retrieval of GPS water vapor and method of rainfall forecast. Doctorial dissertation, China Agricultural University, pp 1–15 Gu XP, Wang CY, Wu DX (2005) Research on the local algorithm for weighted atmospheric temperature used in GPS remote sensing water vapor. Sci Meterol Sin 25(1):79–83 Hogg DC, Guiraud FO, Decker MT (1981) Measurement of excess transmission length on earth-space paths. Astron Astrophys 95:304–307 Li ZH, Zhang XH (2009) New techniques and precise data processing methods of satellite navigation and positioning. Wuhan University Press, Wuhan Li JG, Mao JT, Li CC (1999) The approach to remote sensing of water vapor based on GPS and linear regression Tm in eastern region of China. Acta Meteorol Sin 57(3):283–292 Li GP, Huang GF, Liu BQ (2006) Experiment on driving precipitable water vapor form ground-based GPS network in Chengdu Plain. Geom Inform Sci Wuhan Univ 31(12):1086–1089 Liu YX, Chen YQ, Liu JN (2000) Determination of weighted mean tropospheric temperature using ground meteorological measurement. J Wuhan Tech Univ Survey Map 25(5):400–403 Lv YP, Yin HT, Huang DF (2008) Modeling of weighted mean atmospheric temperature and application in GPS/PWV of Chengdu region. Sci Survey Map 33(4):103–105 Author's personal copy Model for estimating the weighted mean temperature Mao JT (2006) Research of remote sensing of atmospheric water vapor using Global Positioning System (GPS). Doctorial dissertation, Beijing University, pp 1–5 Rocken C, Ware R, Van Hove T, Solheim F, Alber C, Johnson J, Bevis M, Businger S (1993) Sensing atmospheric water vapor with the global positioning system. Geophys Res Lett 20(23):2631–2634. doi:10.1029/93GL02935 Ross RJ, Rosenfeld S (1997) Estimating mean weighted temperature of the atmosphere for Global Positioning System. J Geophys Res 102(18):21719–21730 Saastamoinen J (1972) Atmospheric correction for the troposphere and stratosphere in radio ranging of satellites. Geophys Monogr Ser 15:247–251 Tralli DM, Lichten SM (1990) Stochastic estimation of tropospheric path delays in Global Positioning System geodetic measurements. J Geod 64(2):127–159 Wang et al (2005) Global estimates of water-vapor-weighted mean temperature of the atmosphere for GPS applications. J Geophys Res 110:D21101. doi:10.1029/2005JD006215 1135 Wang Y, Liu LT, Hao XG et al (2007) The application study of the GPS Meteorology Network in Wuhan region. Acta Geod Cartogr Sin 36(2):141–145 Wang XY, Dai ZQ, Cao YC et al (2011) Weighted mean temperature Tm statistical analysis in ground-based GPS in China. Geomat Inform Sci Wuhan Univ 36(4):412–416 Yuan LL, Anthes RA, Ware RH, Rocken C, Bonner WD, Bevis MG, Businger S (1993) Sensing climate change using the global positioning system. J Geophys Res 98(D8):14925–14937. doi:10. 1029/93JD00948 Zhang HP, Liu JN, Zhu WY (2005) Remote sensing of PWV using ground-based GPS data in Wuhan region. Progr Astron 23(2):170– 179 Zhang SC (2009) Research and application of remote sensing water vapor using ground_based GPS/Met. Doctorial dissertation, Wuhan University, pp 1–7 123