Introduction - Purdue University

AEROGRAVITY ASSIST TRAJECTORIES
FOR MARS-VENUS SAMPLE RETURN
MISSIONS
Tracey Smith and
Prof. James Longuski
October 2005
Prepared for
Prof. Steven Schneider
AAE 450 Instructor
Purdue University
School of Aeronautics and Astronautics
West Lafayette, Indiana
1
Introduction
The use of gravity assists has opened the door for a multitude of missions. Using a planet’s gravity to turn a spacecraft rather than burning propellant to thrust a spacecraft in a different direction has allowed many missions to be flown that otherwise would not have been feasible.
The continued search for ways of reducing a mission’s
V requirement has led to the idea of not only using a planet’s gravity to help change a spacecraft’s course, but to also use a planet’s atmosphere to obtain an even greater turn with an aerogravity assist
(AGA). The use of aerogravity assists, like gravity assists, provide a greater variety of possible mission designs. During an AGA maneuver the spacecraft uses aerodynamic lift to sling shot itself around a planet. The turn achieved during an AGA maneuver is significantly higher than during a gravity assist, and like a gravity assist, does not require a
V burn. The larger turn capabilities of an AGA maneuver allows for an even greater variety of mission designs than a gravity assist; however, it must be noted that the greater turn angle achieved by an AGA maneuver is offset somewhat by the velocity that is lost to atmospheric drag.
The goal of this study is to look at the dynamics of the aerogravity assist (specifically the trajectory through the atmosphere itself) and determine whether it is possible to match a known V
+
.
[1-6]
Design Process
The design process begins with STOUR , which is used to find all of the possible trajectories (if any exist) for given mission conditions. STOUR is a AGA design tool, which uses a patched conic method to determine possible trajectories. The mission conditions include launch V (3.5 km/s), maximum mission time of flight (550 days), mission path (Earth – Mars – Venus – Earth), and maximum L/D ratios during any AGA maneuvers (3). STOUR then outputs information regarding the total mission, which includes information about the V magnitudes, time of flight, closest approach, etc. for each leg of the mission.
Although STOUR provides a lot if information about the mission, it does not provide any vector information or specifics about the trajectory through the atmosphere. However, it does provide each mission leg time of flight, which is used to determine the Lambert curves on which the spacecraft is traveling during each leg. Quick was used to obtain the
V vectors during approach and departure from each planet, which are needed to compute the initial and final conditions of the atmospheric fly-through. Quick is JPL’s interpretive astrodynamics calculator. The V vectors are also transformed from the Earth inertial J2000 frame to a Mars or Venus centered inertial equatorial and prime meridian frame respectively during this step.
Once the V vectors are known the next step is to calculate the initial and final conditions of the fly through. The initial conditions are based on the V
-
magnitude and a chosen
1
value of r o
. (NOTE: The initial radius, r o
, must be chosen outside of the atmosphere.)
The following equations are used to calculate the initial velocity, v , flight path angle,
, and true anomally,
.
2
2
v
(1) r
cos
1
r v p p r v o o
(2)
cos
1
P
1
* e (3) where v p
2
2 r p
P
h 2
e
1
2
h
2
2
1
2 v
2
A final radius, r f
, is also arbitrarily chosen. Again the only requirement on r f
is that is must be outside of the atmosphere. A final velocity is calculated based on the required
V
+ magnitude and the chosen r f
, using equation (1) above. It is important to note that the velocity corresponds to a specific r . If the velocity magnitude is reached, but at a different radius the V
+ magnitude will not match the required value. Therefore, this point ( r f
,v f
) serves as the matching condition required to achieve the correct V
+ magnitude.
The other condition that needs to be met in order to match the V
+
vector is the direction.
This condition is met by calculating the angle between the incoming and outgoing V vectors and finding the corresponding cruise turn angle that achieves that total turn. The cruise angle will be smaller than the total turn angle because some of the turn is accomplished by gravity on the way to and from the atmospheric fly-through and some of the turn is accomplished during the entry to and exit from the atmosphere. These values, however, are fixed by the orbit and therefore cannot be used as a matching condition.
The value that can be changed to match the V
+ direction is the cruise turn angle,
cruise
.
At this point the AGA equations of motion are integrated because the initial conditions have been established and the matching conditions have been identified. The AGA
EOMs are: dr dt
v sin
(4)
2
dv
D
dt m d
L
g dt mv cos
v g sin
v cos
r
(5)
(6) d
dt
v cos
r
(7)
Once the trajectory is propagated the final V
+
vector can be compared with the required
V
+
vector in order to see if the turn angle and V magnitude were correct. If the V
+ ’s do not match to within a certain tolerance than different values for r p
and
cruise
are chosen and the trajectory is propagated again until the V
+
vectors match.
Assumptions
1.
The Martian atmosphere begins at an altitude of approximately 350 km and the
Venetian atmosphere begins at an altitude of approximately 400 km. Both of these approximations are relatively conservative in that the density at 350 km above the surface of Mars is 1.61*10 -13 kg/m 3 while the density at 400 km above Venus is
4.252*10
-19
kg/m
3
.
2.
The planetary parameters assumed to be the following: the radius of Mars is 3397 km,
Mars
is 4.2828 * 10
4
km
3
/s
2
, the radius of Venus is 6051.8 km and the
Venus
is
3.248587705060 * 10 5 km 3 /s 2 .
3.
The V vectors are in the same plane and are given in either the Mars or Venus centered inertial equatorial and prime meridian frame respectively. They are also given using Cartesian coordinates.
4.
The initial and final altitude is assumed to be 450 km above the surface for both Mars and Venus. This was chosen because it was outside of the atmosphere. The initial and final altitudes do not need to be the same, but in this case they were.
5.
The spacecraft parameters were based on the Hyper X vehicle. The mass of the spacecraft was 3000 lbs. (1361 kg) and the lifting area of the spacecraft was assumed to be 60 ft
2
.
6.
The trajectory was propagated based on the assumption that there was no lift during the entry and exit portions of the atmospheric fly-through. Although drag was still accounted for during these times. The cruise portion of the atmospheric fly-through began when the flight path angle,
, reached zero. The
is constrained to remain at zero during the cruise portion of the fly-through. The lift is “turned on” for this part of the fly-through.
7.
The C
L
and C
D
values used are 0.0571 and 0.0156 respectively, which are assumed to remain relatively constant throughout the flight. These values are based on wind tunnel tests of a blunt leading edge waverider at Mach 14. They are used with a simple L and D model of L = ½ v
2
SC
L and D = ½ v
2
SC
D
.
3
8.
No rarefied flow, shock waves or viscous drag are considered in this model and no wind gusts are accounted for.
9.
The spacecraft lift does not have any out of plane components. (The roll angle is zero.)
10.
The Mars density model uses COSPAR data that is exponentially interpolated for points not included in the table. The Venus density model is an exponential model with a reference density of 10
-4
kg/m
3
at an altitude of 100 km and a scale height of 6 km.
11.
The radius of periapsis is at the same magnitude for both the incoming hyperbolic curve and the outgoing hyperbolic curve although they do not necessarily have to intersect at that point.
12.
The target periapsis for the Earth departure and arrival conditions is an altitude of
300 km. The chosen radius at the Earth corresponded to an altitude of 450 km.
Initial Conditions Results
Both of the following trajectories are launched from Earth on Feb. 20, 2016 with a launch
V of 3.5 km/s. The maximum L/D ratios used in STOUR is 3 for each of the atmospheric fly-throughs; however, the actual value required to fly the trajectory will be slightly higher than 3.
Trajectory 1: Low V ∞
Earth Departure
Departure Date: Feb. 20, 2016
V
∞
+ = 1.5766807193
x + 2.9938697189
y + 0.893105520
z
Planet departure conditions
R_dep = 7278.13 km
V_dep = 11.0356 km/s
_dep = 0.151058 rad
Mars
Arrival Date: July 19, 2016
V
V
∞
-
∞
+
= 7.8772231541
x + 1.0592589199
y + 0.237393750
z
= 2.2816745842
x - 3.1428622660
y - 4.072837473
z
Planet approach conditions
R _initial = 3847 km
V_initial = 9.24634200946673 km/s
_initial = -0.44388870203440 rad
4
Planet departure conditions
R_final = 3847.022246316240 km
V_final = 7.34421118271270 km/s
_final = 0.42406474986035 rad
Venus
Arrival Date: Jan. 25, 2017
V
∞
= -2.5372107523
x + 4.6309662682
y - 3.1250119833
z
V
∞
+ = -0.6142233463
x + 2.6595382310
y + 4.3204364298
z
Planet approach conditions
R_initial = 6501.8 km
V_initial = 11.72935885010359 km/s
_initial = -0.26780287776034 rad
Planet departure conditions
R_final = 6501.327979712902 km
V_final = 11.22699679457943 km/s
_final = 0.26072646132083 rad
Earth Arrival
Arrival Date: July 3, 2017
V
∞
+ = 2.53511877461
x - 0.1965298704
y – 1.6167828300
z
Planet arrival conditions
R_arr = 7278.13 km
V_arr = 10.8910 km/s
_arr = -0.1494207 rad
Trajectory 1: High V ∞
Earth Departure
Departure Date: Feb. 20, 2016
V
∞
+ = 1.5766807193
x + 2.9938697189
y + 0.893105520
z
Planet departure conditions
R_dep = 7278.13 km
V_dep = 11.0356 km/s
_dep = 0.151058 rad
5
Mars
Arrival Date: July 19, 2016
V
∞
= 7.8772231541
x + 1.0592589204
y + 0.23739374800
z
V
∞
+ = 4.9263885214
x - 3.2983605649
y - 2.85678588953
z
Planet approach conditions
R_initial = 3847 km
V_initial = 9.24634200946673 km/s
_initial = -0.44353351925941 rad
Planet departure conditions
R_final = 3847.014740546152 km
V_final = 8.09787148479872 km/s
_final = 0.43331710450773 rad
Venus
Arrival Date: March 4, 2017
V
∞
= 5.2787988233
x + 9.1576508832
y - 0.20971586580
z
V
∞
+ = 2.3614469053
x + 3.8678690527
y - 7.83926928477
z
Planet arrival conditions
R_initial = 6501.8 km
V_initial = 14.54995325150725 km/s
_initial = -0.29389827633939 rad
Planet departure conditions
R_final = 6501.818727883859 km
V_final = 13.48776696026588 km/s
_final = 0.28648812413278 rad
Earth Arrival
Arrival Date: August 9, 2017
V
∞
+ = 4.43117049427
x + 0.3817921385
y + 6.0254789028
z
Planet arrival conditions
R_arr = 7278.13 km
V_arr = 12.8694 km/s
_arr = -0.166426072 rad
6
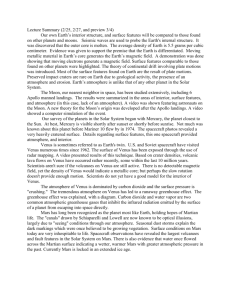
Graphical Results
Trajectory 1: Low V ∞
Mars: AGA trajectory output of altitude, velocity, flight path angle and trajectory
NOTE: The results above correspond to a target r p
= 3418.88 km (alt = 21.88 km) and a cruise turn angle of 46.2225
degrees.
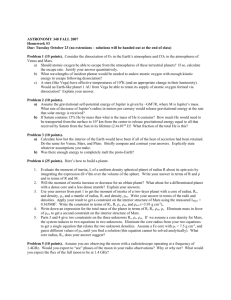
Venus: AGA trajectory output of altitude, velocity, flight path angle and trajectory
Mars
7
Venus
NOTE: The results above correspond to a target r p
= 6140.03379 km (alt = 88.23379 km) and a cruise turn angle of 11.5757 degrees.
Trajectory 1: High V ∞
Mars: AGA trajectory output of altitude, velocity, flight path angle and trajectory
Mars
8
NOTE: The results above correspond to a target r p
= 3419.5527 km (alt = 22.5527 km) and a cruise turn angle of 26.0756
degrees.
Venus: AGA trajectory output of altitude, velocity, flight path angle and trajectory
Venus
NOTE: The results above correspond to a target r p
= 6137.6777 km (alt = 85.8777 km) and a cruise turn angle of 17.0493 degrees.
References
1 Bonfiglio, Eugene, P., “Automated Design of Gravity-Assist and Aerogravity-Assist Trajectories,” Masters
Thesis, School of Aeronautics and Astronautics, Purdue Univ., West Lafayette, IN, 1999.
2 Johnson, Wyatt., “Analysis and Design of Aeroassisted Interplanetary Missions,” Ph. D. Dissertation, School of
Aeronautics and Astronautics, Purdue Univ., West Lafayette, IN, 2002.
3Sims, Jon, A., “Delta-V Gravity-Assist Trajectory Design: Theory and Practice,” Ph. D. Dissertation, School of
Aeronautics and Astronautics, Purdue Univ., West Lafayette, IN, 1996.
4 Gillum, Michael. J., and Lewis, Mark, J., “Experimental Results on a Mach 14 Waverider with Blunt Leading
Edges,” Journal of Aircraft , Vol. 34, No. 3, 1997, pp. 296-303.
5 McRonald, A. D., Randolph, J. E., Lewis, Mark, J., Bonfiglio, E. P., Longuski, J., and Kolodziej, P., “From Leo to the Planets Using Waveriders,” International Space Planes and Hypersonic Systems and Technologies Conference and
3 rd Weakly Ionized Gases Workshop , AIAA 99-4803, Norfolk, VA, 1999.
6 Anderson, J., Lewis, Mark, J., and Kothari, A., “Hypersonic Waveriders for Planetary Atmospheres,” 28 th
Aerospace Sciences Meeeting , AIAA 90-0538, Reno, Nevada, 1990.
9