Multi-Hulled Vessels - Amazon Web Services
advertisement

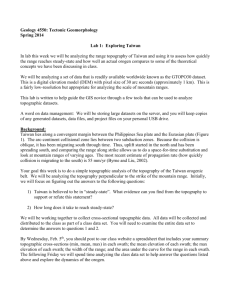
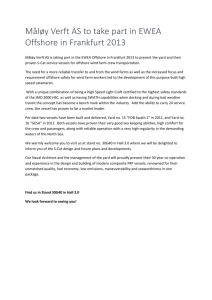
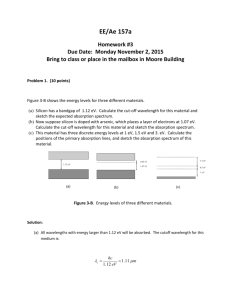
CHAPTER 46 David Andrews Multi – hulled Vessels 46.1 DESCRIPTION 46.1.1 Mission Rather than a specific ship type configured to undertake a transportation or operational mission, multi-hulled configurations are options to be explored by the ship designer in the early exploratory phases of the ship design process. However it is clear that certain multi-hulls have particular capabilities that make them highly attractive options to be considered in comparison with the ubiquitous monohull. Thus if the design has to meet a requirement for a fast short ferry route the designer may well choose a catamaran, possibly with a wave piercing configuration. This form which was first introduced on an economic basis in Australia has become an extremely successful ship type with an increasingly large portion of the fast ferry market around the world and with an ever increasing size range. Given this a separate chapter ( Chapter 46 ) is devoted to the high speed catamaran ferry type. This chapter therefore focuses on the wider range of multihulls, and in particular the Small Waterplane Twin Hull (SWATH) vessel and the Trimaran ship type, namely a slender monohull with small displacement outriggers. There are in addition variants of these two basic configurations, such as the ( SLICE ) and the Pentamaran, which will be considered as sub-variants of the two main configurational types. Beyond them are certain of the hybrid advanced hull forms, such as the Surface Effects Ship (SES), which is really a variant of the high speed Air Cushion Vehicle (ACV) but with some buoyancy based lift from the two side hulls is strictly a multi-hull, however it is being covered in Chapter 44 as a High Speed Surface Craft. There are also more exotic hybrids, such as the (SWASH) and the TriSwash, which rather like the (HYSWAS), can be considered currently as advanced concepts yet to achieve even the maturity of the SWATH and, more recently, the Trimaran. 46.1.2 These will be dealt with separately with any variant of each type covered when and where it is deemed appropriate. The SWATH has had a much longer history, both as a concept and as a practical ocean going ship form, with many examples having been built and operated around the world. The Trimaran is a much more recent configuration, proposed as a seagoing ship type only a decade ago and with currently (2001) only one example, a 1,200 tonne vessel at sea as a technology demonstrator for the surface combatant naval vessel. Given that these two multi-hulled vessel types have quite distinct characteristics, it is sensible to deal with each in turn. 46.1.2.1 SWATH The origins of a twin hulled ship configuration with two deeply submerged hulls, struts piercing the water air interface and being connected by a box structure some distance above the still waterline could be said to go back to a Captain Beadon of the British Royal Navy, who proposed in 1860 such a basic configuration, see Figure 46.1. This, as so much technical exploration in the nineteenth century, came to little due to the general explosion in commerce and technology. It was also not developed at that time because of a basic lack of understanding in the burgeoning scientific knowledge related to the engineering discipline of naval architecture, which was fully employed in servicing the rapid developments in steam powered monohulled vessels. The next significant SWATH like proposal was by Creed (194?) at the end of World War II. He produced a concept of a twin hulled aircraft carrier, see Figure 46.2, which exhibited the main features of the current SWATH configuration, but did so primarily to achieve a long wide and stable flight deck for aircraft operations without the commensurate large monohull to support it. Unique Features and Capabilities The defining characteristic of any multihulled vessel is clearly having more than one hull that provides weight support, usually but not inevitably, through buoyancy. As already stated in the previous section, aside from the high-speed catamaran ferry type covered in Chapter 44, the two principal multihulled vessel types are the SWATH and the Trimaran. 46-1 Figure 46.1 - Beadon's ICHYON of 1860 Figure 46.2 - Creed's 1946 Aircraft Carrier Proposal It could be said with the acquisition of a scientific understanding of the nature of a ship's seakeeping ability and the analysis of the ship's motion in a seaway, made possible by the use of electronic computers, that the inherent advantages of a form with a very small waterplane ( and deeply submerged main hulls providing buoyant lift ) was perceived in the 1960s. Thus several patents were filed in the U.S.A. and research commenced on the SWATH form, particularly at the David Taylor Model Basin (now the Naval Surface Warfare Center, Carderock ). The configuration that was seen to be the most suitable in the quest for the ideal seakeeping form exhibited the main characteristics shown in Figure 46.3. SWATH will give rise to specific issues which will need to be approached with care and resolved in a manner appropriate to the particular application being considered. These differences from the conventional ship derive from the quite different overall proportions of the SWATH, being greater in Beam, Depth and Draught, whilst shorter in overall Length than the equivalently sized monohull. What actually constitutes a monohull equivalent of a given SWATH design is not actually straight forward since for a given performance, dependent on the mission the design is to meet, different SWATH design solutions are likely to apply. All that can be said at a generic level is that a direct displacement comparison or even an enclosed volumetric equivalence is unlikely to be a meaningful comparison. This issue is considered in more depth in Section 46.1.2 under seakeeping performance. The differences between SWATH and monohull have been identified and discussed by Kennell in 1985 and are summarised below:( Brief summary of Kennell 1985) 46.1.2.2 TRIMARAN ( Evolution of Outriggers ILAN VOYAGER UCL/MOD Studies plus Trimaran features R.V. TRITON with illustrations ) 46.1.3 General Arrangements 46.1.3.1 SWATH ( Survey of a range of existing SWATH designs. Photos and G.As Kaimalino Kaiyo Halcyon Victorious Patria Radison Diamond Stena HSS 1500 Sea Shadow SLICE ) 46.1.3.1 TRIMARAN Figure 46.3 - The Main Features of a SWATH Vessel ( Survey of a range of Trimaran designs including studies with Photos and G.As where available Cable and Wireless R.V. TRITON FSC concept Vosper Corvette The SWATH vessel is considerably different from the conventional monohull, requiring the designer to appreciate that the different features of the 46-2 46.2 SYSTEM DESIGN for SWATH VESSELS 46.2.1Hull Form, Propulsion and Performance 46.2.1.1 rotational speed due to position aft of elliptical hull, so high propulsive eff. Like submarine (Kennell '92 p58) Endurance depends on speed regime appropriate to mission.) UCL fast ferry model UCL studies, including Frigates, small Aircraft Carrier, large Cruise Liner Pentamaran Triswach ) Hull Form ( Hull form essentially defined in Fig 46.3 with cross structure, struts, hulls (ellipitcal) and haunch and wet deck. Hull designed with either high prismatic or low prismatic form, elliptical configuration 1.5 horiz by 1.0 vert. Issue of strut length relative to hull length for rudder arrangement. Issue of one or two struts. Issue of stabilisers. Issue of wet deck with deflectors (Kaimalino) ) 46.2.1.2 Resistance and Propulsion ( SWATH suffers from calm water resistance penalty cfompared with monohull of the same displacment. Resistance made up of skin friction, residual drag (wavemaking), appendage drag. Powering usually as monohull, that is, openwater propeller eff., wake factor, thrust deduction, RRE, and propulsive eff., but geometry results in quite different flow regime into prop so resistance elements in quite different proportions and powering can be noticeably different. Larger wetted area and have to consider struts separately from hulls with different Reynolds number. Residuary resistance leads to complicated picture with hump based on Froude number on hull length:- Low speed vessels displ >2000 t , Fn < 0.3 High speed vessels displ < 500 t , Fn >0.46 Issue of prismatic forms summarise Kennell '92 p51-54 Typical model to full scale correlation coefficient 0.0005 Plus appendages (Kennell '92 p 55) Issue for the designer is lack of a methodical series Propeller design process as monohull but scope for large diameter and lower 46.2.1.3Seakeeping ( SWATH primary attribute long natural periods in heave, pitch and roll . ( E.g. 3000 t SWATH 11-13 sec Heave, 14-17 sec Pitch, 18-20 sec Roll , see Kennell '92 p65) Steady platforming motion in moderate seas (wave periods less) High seas waves following contouring motion ( wave periods more), so reduced likelihood of wet deck slamming. In between resonance probably following seas, basic SWATH form poor cf. Monohull but easily ameliorate with active fin stabliser control, fins relatively large ( Kennell '92 p.64) Hull form design for seakeeping then key considerations : Probable sea conditions Operational speeds and headings Seakeeping criteria Hull parametrics Fin and control systems Avoidance of multiples of periods Adequate damping to limit heave and pitch resonance Adequate wet deck clearance Acceptable performance in realistic survival seas (also see Betts '88 on operability index) SWATH characteristics e.g. TAGOS 19 :Roll gyration 46% Beam cf. 40% monohull Pitch gyration 31% LBP cf. 24% monohull Issue of Munk moment and pitch stability Issue of active control Comparative seakeeping Kaimalino - Tagos 19 - Kennell SNAME '85 plots ) 46.2.1.4 Manoeuvring and Control ( SWATH has very good directional stability. Means turning circle is poor cf. Monohull e.g. TD/L 1 at zero speed , 5 at 10 kts, 10 at 25 kts cf 4-7 for monohull, but remember "equivalent ship" is shorter than monohull, so TD can be the same value absolutely. 46-3 Rudders usually ahead of propellers, spade on aft of strut. Or can adopt control fins cantered 20-30 deg. Downwards as in TAGOS 19. ) 46.2.2 Payload Related Systems ( No specific systems for SWATH in general, though if specialist mission then there would be specific to mission equipment e.g. TAGOS 19 as towed sonar vessel has special winches as well as data processing outfits. The SWATH relevant issue is that the SWATH provides a very stable platform together with widely separated hulls making operation of arrays in very high sea states very effective. For certain research ship uses ( e.g. Kaiyo) then incorporation of a moon pool is facilitated by the short aspect ratio of the cross deck box structure and the widely separated hulls. The is still a need to check that the insertion of a moon pool does not infringe the structural integrity of the transversely limited structural design philosophy ( see section 46.2.3). For comparison of payload abilities for three main applications of the SWATH concept see Kennell '92 p 81-82 ( Frigates, TAGOS, Fast Ferries). Question on validity of payload comparison as SWATH justification more likely to be one of operability (e.g. TAGOS/PATRIA justified on excellent seakeeping over straight payload carrying ability). 46.2.3 Hull Structure (Significant section - draw on Kennell' 92, ISSC '88 and Betts) ( Typical structure Kennell fig 4.1. Material usually steel - except small high speed vessels< 1000 t typically. Most loads on SWATH as for monohulls except main hydrodynamic loads arising from pressure forces which give both primary and secondary loads. Wave induced pressure distribution but where vertical shear force and longitudinal BM is dominant in monohulls they are small in SWATH due to hulls slenderness and section shape. However in Beam seas the differential distribution on the hulls leads to the "prying" action, squeezing hulls together and apart giving bending action on the box structure transversely (see Kennell '92 fig 4.3 46-4 Thus alternating transverse side forces applied near mid draught, these reach a maximum value since the higher waves with low probability of occurrence are too long to cause the differential loading on the two hulls (e.g. SWATH 3-4000 t then peak side load at Sea state 6 ). For reliable structural design assurance need to perform model tests, but worth earlier analysis using essentially seakeeping theory programs :- force induced on hulls by incident seas not distorted by ship - force due to diffraction of waves about the statioary ship - the effect of the ship's motion Betts '88 suggests initial value of design transverse load as F = K x Displ0.77 , where K is 7.94 for single strut and 4.26 for double strut configuration based on regression analysis. Sikora '83 gives the results of parametric variation in SWATH dimensions for transverse force, but only for large SWATHS >3000 t. There is also an issue with quartering seas where the torsional load can the design of the strut bulkheads at the ends of the vessel. For combined loads Betts '88 gives guidance ( Table V ) Slamming is an issue for both the wet deck and the strut panel design. Given the importance of the transverse bulkheads in resisting the primary transverse loads great care needs to be taken in the panel design against shear failure especially at the bulkhead outboard most panels. The structural design process is :- define the operational envelop - define the load spectrum - design structural scantlings for selected design criteria - conduct stress analysis - conduct fatigue analysis The scantlings will be determined by the design pressures assumed for the slam and hydrostatic loads when combined with the framing and subdivision selected. In this regard the shear lag effect limiting the effective breadth of the deck structure acting with the bulkheads in bending must be allowed for in choosing the transverse bulkhead spacing. ( Kennell '92 Fig 4.2). A good approximation can be achieved by using the panel and grillage design to resist these slam and hydrostatic secondary loads. To estimate the maximum load on the transverse bulkheads mid bay to mid bay need to resort to F.E.A. ( see Kennell '92 p. 34 ). Structural weight fraction for a SWATH will be greater than its "equivalent" monohull due to a greater surface area ("wall paper") with more bulkheads and greater loads likely. This can mean the SWATH is typically some 25 30 % greater than the monohull and this can be quite penalising if there is not an overriding requirement for the SWATH's superior seakeeping ability.) 46.2.4 Ship Outfitting ( Issues associated with boat handling given the relatively high weather deck, but this is mitigated by the greater degree of motion stability. This is also the reason why SWATHs , even quite small in displacement are seen as excellent as personnel ferries (eg Royal Navy's two ferries to take inspection teams out ships riding out beyond harbour. The rough weather trials on TAGOS 19 ( USNEJ '9? ) revealed that in beam seas plumes of water could rise vertically and result in damage to boats and life rafts placed at the ships side even with the characteristically high freeboard on a SWATH.) 46.2.5 concommitent increase in outfit weight and cost. Against this must be weighed the fact that the SWATH hull shape enables the motor to be placed as far aft as possible to virtually eliminate the shaft as a major cost and layout feature. As far as ship auxiliary systems are concerned, the move to the all electric ship technology will further simplify the ship systems design task. It is the case that a SWATH is likely to demand a greater hotel load due to its larger exposed area to the elements than it monohull equivalent. This can be seen specifically with regard to HVAC. Another ship service that clearly is more demanding in the case of the SWATH is the ship's Trim and Ballast system, where there is a clear need to maintain the waterline at the design level (otherwise the seakeeping performance will be off design and structural loadings exceed design levels). In this regard the SWATH is more akin to the military submarine with a significant requirement for trim and ballast tanks with the associated pipe work and pumping capacity, albeit not to submarine levels of pressure hardening. ) 46.3 DESIGN ISSUES for SWATH VESSELS 46.3.1 Stability and Damage Stability Machinery Arrangements ( A wide range of propulsion plant was fitted in the early and relatively small SWATHs from gas turbines and diesels using bevelled gears, chain drives and direct drive transmission. Now that electric ship technology is becoming the standard choice for cruise liners in the commercial world and is the declared choice for future naval combatants ( McCoy '88, Newell 2000), this is providing propulsion technologies that are ideal for SWATH ships in terms of high density motors that can more readily fit into the SWATH's hulls and distributed electrically generating prime movers that can be located to exploit the more rectilinear internal arrngement provided by the cross deck box structure. There may still remain the issues that there have been in the current SWATH vessels at sea, associated with motor cooling when deeply located well below the normal monohull machinery bilge level. The depth issue is also relevant to the need for main power cable runs of greater lengths with 46-5 ( Given the small waterplane and the constant value of the Tonnes Per Metre Immersion (TPI) until either the haunches or the top of the hulls are at the waterplane, then the ship hydrostatics are boringly uninteresting , see fig 46. xx. Again with the two widely spaced struts, even with their small waterplanes they provide sufficient second moment to mean that the GZ curve for a SWATH vessel is inherently good, see Fig 46. xx. If the same criterion is applied for damage stability as would be applied to a monohulled warship (e,g, Sarchin-Goldberg or equivalent ) then typically a 15% opening is likely to bring the box structure of a typical SWATH vessel to the waterline. This is unlikely to be a problem as shown by a design study for a SWATH frigate ( Betts '87) where this damage incident leads to a condition with a 21 metre hole in one hull resulting in the ship heeling to 14 degrees, which would not hazard the ship. Further more with the generous provision of ballast tankage the ship cold be readily restored to the upright, a facility not available to the monohull designer. The only proviso to be made in exploiting this feature of the SWATH is that the box structure and sensibly its internal subdivision must be designed to be watertight. ) 46.3.2 Fire Safety ( This is not a major issue in large SWATH vessels as they are not different from their conventional monohull equivalents with regard to susceptibility to fire and to the level of fire fighting facilities required - always assuming that the SWATH vessel is not being used for the carriage of cargoes with significant fire hazards. The issue for small high speed SWATH craft and ferries is likely to be more significant, as they are more likely to be of aluminum construction and carry automotive vehicles with flammable fuels. However, again the design standards are unlikely to be any different to those for their monohull, and indeed catamaran equivalent. As far as SWATH specific fire safety considerations are concerned, it is likely that the rectilinear short aspect ratio of the cross decked box structure will facilitate both the installation of fire fighting features and the separation of escape routes in the case of evacuation. The same can not be said for the accessibility of the hulls via tall narrow struts, however these are not going to be heavily manned spaces, if occupied at all.) 46.3.3 and other multihulls, to the extent that helicopter operations can continue in higher sea states. Other evolutions such as towed array operations on the US Navy TAGOS 19 Class vessels are possible well beyond the sea states that limited their monohull predecessors effectiveness. Again for military vessels the deeply located propellers in excellent flow regimes, combined with electric drives, ensure the acoustic signatures are optimised for the vessel's sonar performance.) 46.3.5 ( There are no major specific issues associated with human factors as far as SWATH vessels are concerned, as they are not that different in their operations from their conventional equivalents. Clearly the motion stability and the separation of the working and living areas from the services in the deeply submerged hulls, provides an essentially well designed environment for life at sea. ) 46.3.6 Environmental Issues ( Aside from any hazardous operations or cargoes associated with a specific role or mission there are no major environmental issues specific to SWATH vessels as such. The relatively deep draught of the SWATH could in certain confined coastal waters be a potential issue but this is more likely to limit the choice of a SWATH form for certain shallow ferry routes. On the other hand with the very small waterplane and deeply submerged propellers the SWATH might be attractive where concerns over the wake produced by more conventional displacement craft is a major environmental concern. ) Comfort, motion, noise, vibration (It is probably sensible to consider these aspects for the small high speed SWATH ferries separately from consideration of the larger, generally ocean going specialist SWATHs. Having said that, all SWATHs are characterised by their superior seakeeping qualities over other ship configurations, they are certainly far superior to the basic fast catamaran ferries, which suffer from slamming and slam induced whipping leading to fatigue damage in quite moderate quartering seas and a resultant unpleasant motion. SWATH ferries are thus less likely to be weather limited as has been shown by the success of the PATRIA on the mainland to Balaerics route. Vibration and noise for the smaller SWATHs is dependent on the propulsion system adopted, but in general deep propellers and excellent flow conditions into the propellers eliminate vibration. For the larger SWATH vessels motions are greatly reduced, relative to conventional monohulls Human Factors 46.3.7 46-6 Producibility ( Given the SWATH is largely a conventional ship in technology terms, it is just the configuration that is different, the producibility considerations are also largely similar to conventional ships. Thus SWATHs are built in normal shipyards appropriate to small high speed ferries or larger conventional steel ships. In fact with essentially a prismatic box, strut and hull shape it ought to be cheaper and easier to build SWATH ships than the more curvacious monohull equivalent as ththe shpe is more conducive to modular constuction. There is some evidence for this in the one class of sizeable SWATH ships built for the US Navy, TAGOS 19 Class. These ships were built in a Gulf Coast yard specialising in basic support vessels for the offshore industry, and were able to build the SWATH ship quickly and cheaply as a class. Having said that larger SWATHs become problematic to launch unless the yard has a very large ( and wide ) dry dock, or in the case of the 3000 t TAGOS ships, the use of a massive floating crane. ) 46.3.8 - - Preliminary Design Methods ( Draw on Betts Shaghai'88 and UCL MSc procedure. - The initial design procedure for a SWATH vessel is more complicated than for its conventional equivalent, as there are many more variables that need to be taken into account from the beginning in order to get a first estimate of ship size. This does have the advantage that that the geometry of each separate part, namely box structure, struts and hulls, can to some degree be considered separately, although they must then be sensibly brought together, as their final selected dimensions are interactive with each other in achieving a balanced design. The complication is further compounded, as with all novel hull forms, by a basic lack of design data and in particular sufficient parametric guidance. Betts '88 describes the existing design tools for SWATH preliminary design and Betts and Kennell '92 outline the important considerations in the choice of the various features :- A clear preference for a single strut per side hull, rather than twin configuration, for reasons of greater stability, better access to the hulls, greater space available in the struts and improved structural arrangements - Additionally a single strut per hull gives reduced drag by elimination of wave interference effects between the struts, improved survivability and better behaviour in extreme seas, where a twin strut configuration will not contour as well, inducing wet deck slamming - Choosing the strut length to be less than the hull, reduces resistance and pitch excitation, whilst easing alignment of LCF and LCB, 46.3.9 46-7 minimising coupling of pitch and heave, however a short strut means the rudder arrangement is likely to be of the hull rather than the simpler spade arrangement behind the strut. Strut separation is likely to be chosen to suit layout concerns and achieving the requisite transverse statical stability Box clearance is likely to be driven by the need to clear the design significant wave height when platforming, although this can then be the driver on structural weight fraction Flare on the strut sides can be helpful against the effects of weight growth but can impair seakeeping in moderate seas, hence is restricted often to well above the waterline and then assists in plume deflection in beam seas. ) Future Developments ( The priority areas seen as requiring to be addressed if the currently research dependent nature of SWATH design and operation, are seen as those that have been identified in the several international conferences that have been held on SWATH vessels specifically or on advanced and unconventional craft including SWATHs as a particular theme. In particular the following have been highlighted :- accurate predictions, validated by full scale trials, of motions - development of realistic operability criteria and the evaluation of performance against these criteria - accurate and validated structural load prediction - rational structural design tools - refinement of control system design - realistic costing methods, including through life cost - improved CAPD tools for principal parameter selection - refined damage stability criteria, including for moderate heel conditions - improved auxiliary system design, linked to the all electric ship concept It has to be said that consistent with the general comment that SWATHs are essentially unconventional hulls applied to conventional ship technology, that many of these issues also apply to improving conventional ship design and performance. Finally it is worth listing the range of ship types where the SWATH configuration is seen as having distinct potential :- small and medium ferries - hydrographic and surveying vessels - mine counter measures ships - luxury yachts and small cruise ships - Anti- Submarine Warfare escorts - Offshore Patrol Vessels - Small and moderate speed helicopter carriers ) 46.4 SWATH SHIP CHARACTERISTICS ( Table I Betts '88 amended by Kennell '92 and any more recent vessels - SEA SHADOW etc ) 46-8